
An IDA-PBC Design with Integral Action for Output Voltage Regulation in an Interleaved Boost Converter for DC Microgrid Applications

 ,
,  ,
,  , and
, and
Abstract
:1. Introduction
- The application of the IDA-PBC controller to the interleaved boost converter for output voltage regulation in DC microgrids with variable injected/demanded current: to improve the IDA-PBC design’s performance, an integral action is added using the passive output of the system that does not affect the stability properties in closed-loop and allows eliminating the steady-state errors introduced by possible unmodeled dynamics;
- The proposed controller owns the advantage of not depending on the parameters of the interleaved boost converter which makes its robustness parametric variations.
- Select the current references through the inductor to maintain a balanced operation at each branch for positive and negative references.
2. Average Modeling for an Interleaved Boost Converter
3. IDA-PBC Design
3.1. Assignable Equilibrium Point
3.2. Classical IDA-PBC Design
3.3. IDA-PBC Redesign with Integral Action
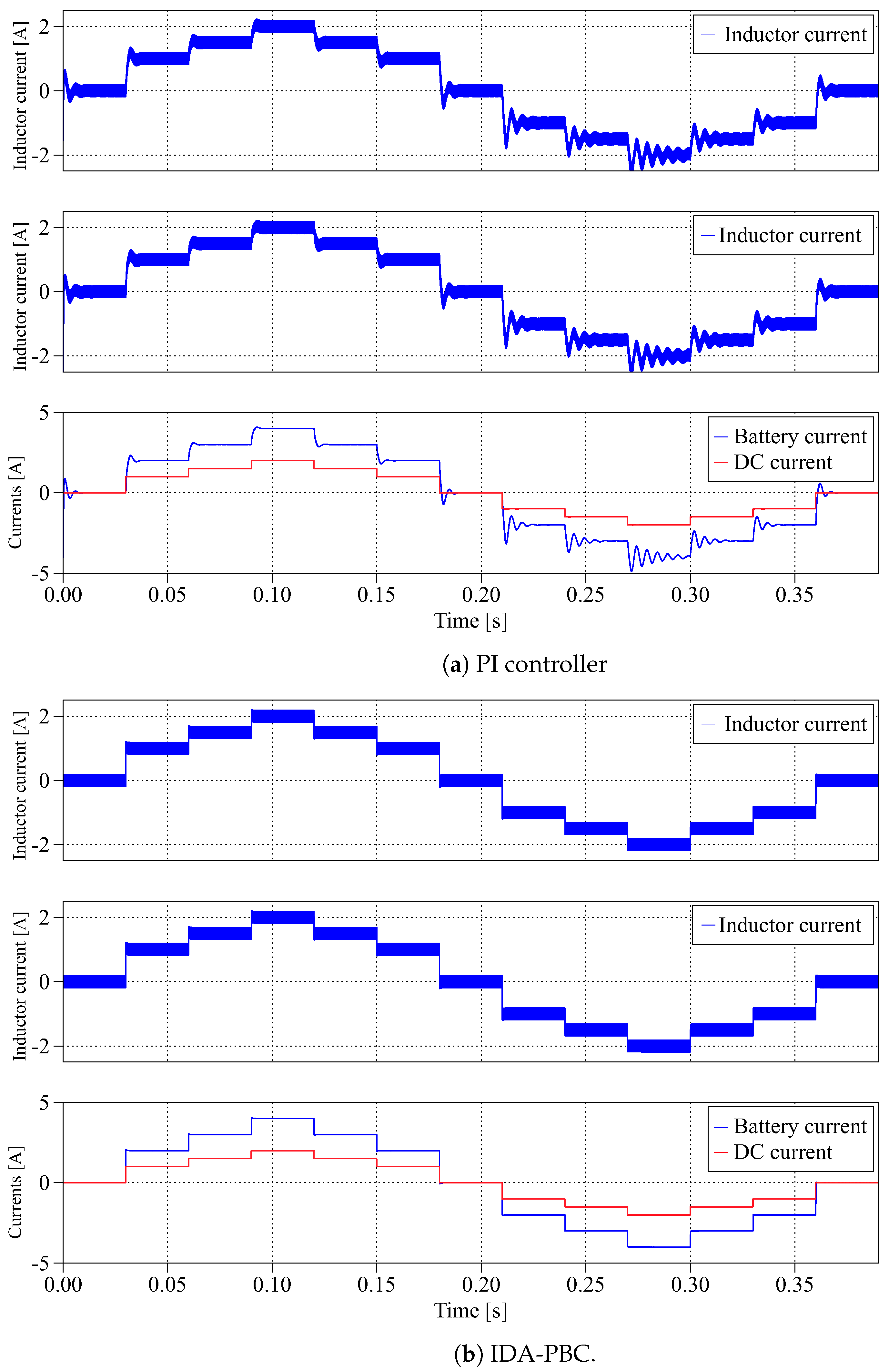
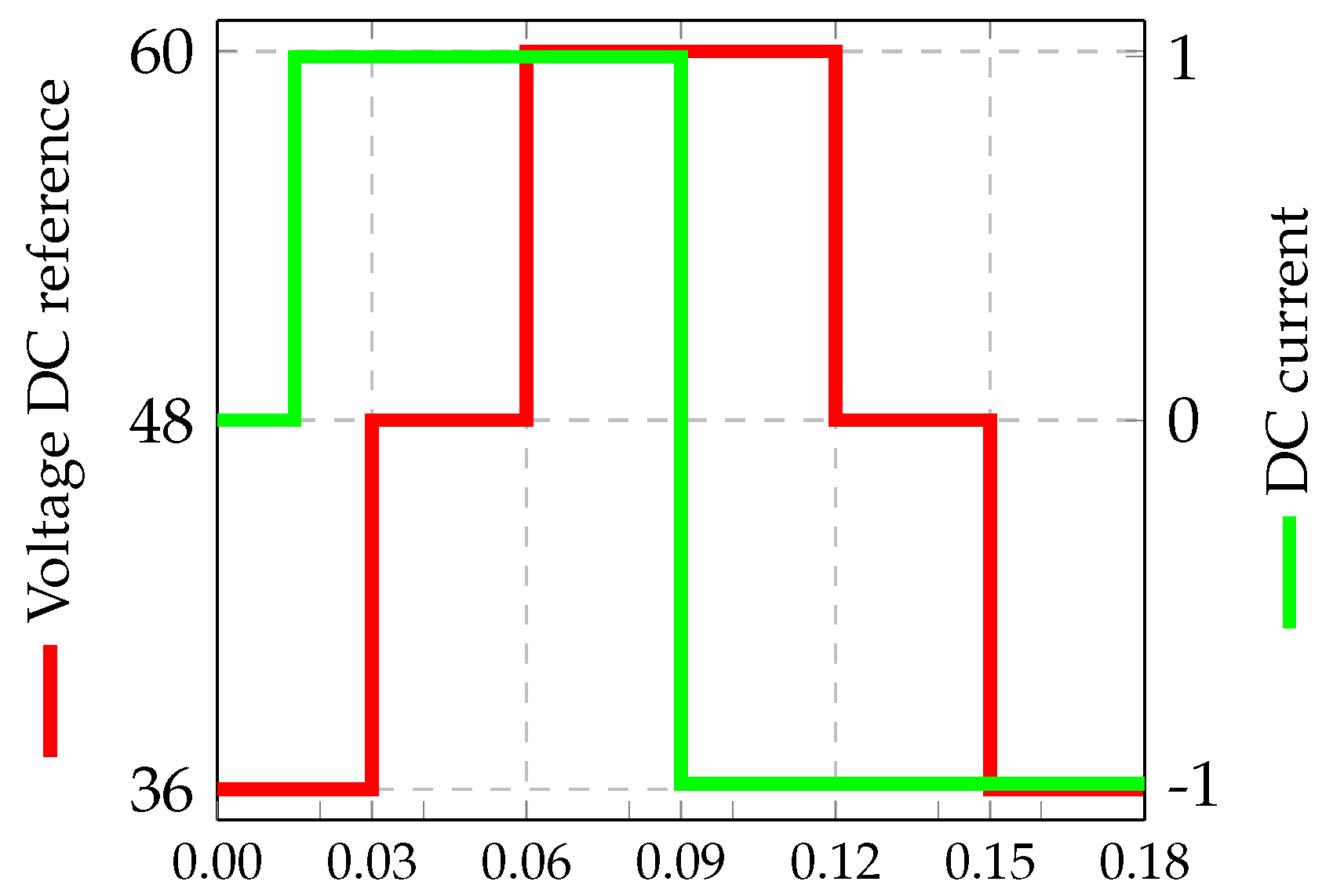
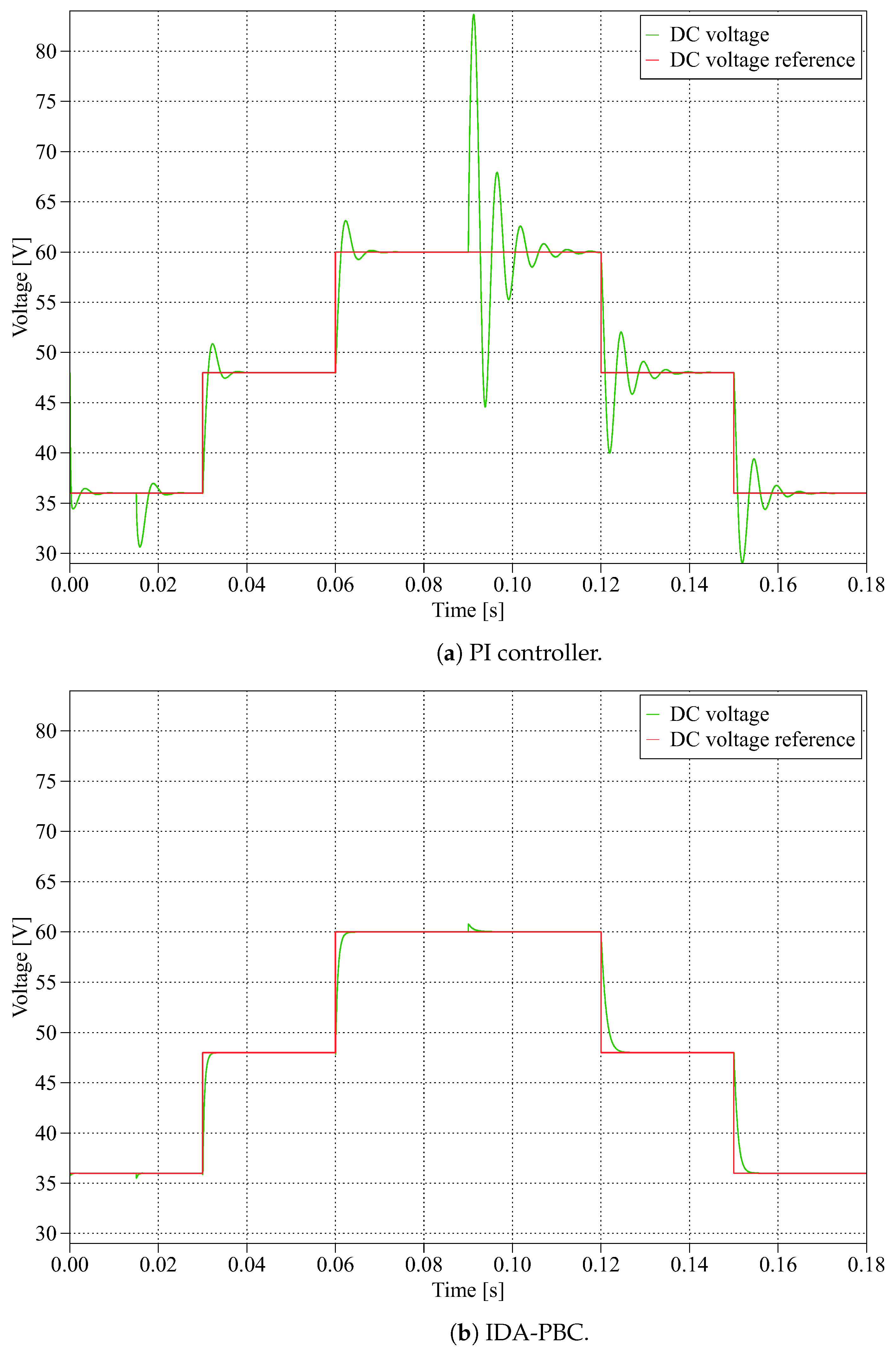
4. Numerical Validation
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lana, A.; Mattsson, A.; Nuutinen, P.; Peltoniemi, P.; Kaipia, T.; Kosonen, A.; Aarniovuori, L.; Partanen, J. On Low-Voltage DC Network Customer-End Inverter Energy Efficiency. IEEE Trans. Smart Grid 2014, 5, 2709–2717. [Google Scholar] [CrossRef]
- Montoya, O.D.; Gil-González, W.; Serra, F.M.; Angelo, C.H.D.; Hernández, J.C. Global Optimal Stabilization of MT-HVDC Systems: Inverse Optimal Control Approach. Electronics 2021, 10, 2819. [Google Scholar] [CrossRef]
- Garces, A. Uniqueness of the power flow solutions in low voltage direct current grids. Electr. Power Syst. Res. 2017, 151, 149–153. [Google Scholar] [CrossRef]
- Justo, J.J.; Mwasilu, F.; Lee, J.; Jung, J.W. AC-microgrids versus DC-microgrids with distributed energy resources: A review. Renew. Sustain. Energy Rev. 2013, 24, 387–405. [Google Scholar] [CrossRef]
- Lotfi, H.; Khodaei, A. AC Versus DC Microgrid Planning. IEEE Trans. Smart Grid 2017, 8, 296–304. [Google Scholar] [CrossRef]
- Magaldi, G.L.; Serra, F.M.; de Angelo, C.H.; Montoya, O.D.; Giral-Ramírez, D.A. Voltage Regulation of an Isolated DC Microgrid with a Constant Power Load: A Passivity-based Control Design. Electronics 2021, 10, 2085. [Google Scholar] [CrossRef]
- Serra, F.M.; Angelo, C.H.D. Control of a battery charger for electric vehicles with unity power factor. Trans. Energy Syst. Eng. Appl. 2021, 2, 32–44. [Google Scholar] [CrossRef]
- Solsona, J.A.; Jorge, S.G.; Busada, C.A. Nonlinear Control of a Buck Converter Which Feeds a Constant Power Load. IEEE Trans. Power Electron. 2015, 30, 7193–7201. [Google Scholar] [CrossRef]
- Salimi, M.; Siami, S. Cascade nonlinear control of DC-DC buck/boost converter using exact feedback linearization. In Proceedings of the 2015 4th International Conference on Electric Power and Energy Conversion Systems (EPECS), Sharjah, United Arab Emirates, 24–26 November 2015; IEEE: Piscataway, NJ, USA, 2015. [Google Scholar] [CrossRef]
- Gil-González, W.; Montoya, O.D.; Restrepo, C.; Hernández, J.C. Sensorless Adaptive Voltage Control for Classical DC-DC Converters Feeding Unknown Loads: A Generalized PI Passivity-Based Approach. Sensors 2021, 21, 6367. [Google Scholar] [CrossRef]
- Ramos-Paja, C.A.; Gonzalez-Motoya, D.; Villegas-Seballos, J.P.; Serna-Garces, S.I.; Giral, R. Sliding-mode controller for a photovoltaic system based on a Cuk converter. Int. J. Electr. Comput. Eng. (IJECE) 2021, 11, 2027. [Google Scholar] [CrossRef]
- Jin, P.; Li, Y.; Li, G.; Chen, Z.; Zhai, X. Optimized hierarchical power oscillations control for distributed generation under unbalanced conditions. Appl. Energy 2017, 194, 343–352. [Google Scholar] [CrossRef] [Green Version]
- Iskender, I.; Genc, N. Power Electronic Converters in DC Microgrid. In Power Systems; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 115–137. [Google Scholar] [CrossRef]
- Quintero, C.E.; Pérez, S.A.; Ceballos, J.P.V.; González-Montoya, D.; Garcés, S.S. Design and Digital Control of an Interleaved Boost Converter for Battery Charge/Discharge. Tecnológicas 2021, 24, e1556. (In Spanish) [Google Scholar] [CrossRef]
- He, L.; Lin, Z.; Tan, Q.; Lu, F.; Zeng, T. Interleaved High Step-Up Current Sharing Converter with Coupled Inductors. Electronics 2021, 10, 436. [Google Scholar] [CrossRef]
- Hausberger, T.; Kugi, A.; Eder, A.; Kemmetmüller, W. High-speed nonlinear model predictive control of an interleaved switching DC/DC-converter. Control. Eng. Pract. 2020, 103, 104576. [Google Scholar] [CrossRef]
- Cervantes, I.; Mendoza-Torres, A.; Garcia-Cuevas, A.; Perez-Pinal, F. Switched control of interleaved converters. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–11 September 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar] [CrossRef]
- Kumar, S.S.; Kanimozhi, G. A nonlinear control technique for interleaved boost converter. In Proceedings of the 2016 10th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 7–8 January 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- Cid-Pastor, A.; Giral, R.; Calvente, J.; Utkin, V.I.; Martinez-Salamero, L. Interleaved Converters Based on Sliding-Mode Control in a Ring Configuration. IEEE Trans. Circuits Syst. I Regul. Pap. 2011, 58, 2566–2577. [Google Scholar] [CrossRef]
- Tiwari, A.; Jaga, O.; Soni, S.S. Sliding mode controller based interleaved boost converter for fuel cell system. In Proceedings of the 2017 Recent Developments in Control, Automation & Power Engineering (RDCAPE), Noida, India, 26–27 October 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Gkizas, G.; Amanatidis, C.; Yfoulis, C.; Stergiopoulos, F.; Giaouris, D.; Ziogou, C.; Voutetakis, S.; Papadopoulou, S. State-feedback control of an interleaved DC-DC boost converter. In Proceedings of the 2016 24th Mediterranean Conference on Control and Automation (MED), Athens, Greece, 21–24 June 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar] [CrossRef]
- González, A.; López-Erauskin, R.; Gyselinck, J. Analysis, modeling, control and operation of an interleaved three-port boost converter for DMPPT systems including PV and storage at module level. Heliyon 2019, 5, e01402. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Olmos-Lopez, A.; Guerrero, G.; Arau, J.; Aguilar, C.; Yris, J.C. Passivity-based control for current sharing in PFC interleaved boost converters. In Proceedings of the 2011 Twenty-Sixth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Fort Worth, TX, USA, 6–11 March 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar] [CrossRef]
- Zhou, H.; Khambadkone, A.M.; Kong, X. A Passivity Based Control with Augmented Integration for an Interleaved Current Fed Full Bridge Converter as a Front End for Fuel Cell Source. In Proceedings of the 2007 IEEE Industry Applications Annual Meeting, New Orleans, LA, USA, 23–27 September 2007; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar] [CrossRef]
- Bharathi, M.; Kirubakaran, D. Solar powered closed-loop controlled fuzzy logic-based three-stage interleaved DC-DC boost converter with an inverter. Int. J. Adv. Intell. Paradig. 2016, 8, 140. [Google Scholar] [CrossRef]
- Sunarno, E.; Sudiharto, I.; Nugraha, S.D.; Qudsi, O.A.; Eviningsih, R.P.; Raharja, L.P.S.; Arifin, I.F. A Simple And Implementation of Interleaved Boost Converter For Renewable Energy. In Proceedings of the 2018 International Conference on Sustainable Energy Engineering and Application (ICSEEA), Tangerang, Indonesia, 1–2 November 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar] [CrossRef]
- Barhoumi, E.; Belgacem, I.B.; Khiareddine, A.; Zghaibeh, M.; Tlili, I. A Neural Network-Based Four Phases Interleaved Boost Converter for Fuel Cell System Applications. Energies 2018, 11, 3423. [Google Scholar] [CrossRef] [Green Version]
- Gonzalez, W.J.G.; Bocanegra, S.Y.; Serra, F.M.; Bueno-López, M.; Magaldi, G.L. Control Methods for Single-phase Voltage Supply with VSCs to Feed Nonlinear Loads in Rural Areas. Trans. Energy Syst. Eng. Appl. 2020, 1, 33–47. [Google Scholar] [CrossRef]
- Serra, F.M.; Angelo, C.H.D.; Forchetti, D.G. Interconnection and damping assignment control of a three-phase front end converter. Int. J. Electr. Power Energy Syst. 2014, 60, 317–324. [Google Scholar] [CrossRef]
- Herrera-Pérez, J.J.; Garcés-Ruiz, A. Análisis de estabilidad de convertidores de segundo orden con la metodología de optimización de suma de polinomios cuadráticos. Trans. Energy Syst. Eng. Appl. 2020, 1, 49–58. (In Spanish) [Google Scholar] [CrossRef]
- Serra, F.M.; Angelo, C.H.D. IDA-PBC controller design for grid connected Front End Converters under non-ideal grid conditions. Electr. Power Syst. Res. 2017, 142, 12–19. [Google Scholar] [CrossRef]
- Donaire, A.; Junco, S. On the addition of integral action to port-controlled Hamiltonian systems. Automatica 2009, 45, 1910–1916. [Google Scholar] [CrossRef]
- Asadi, F.; Eguchi, K. Simulation of Power Electronics Converters Using PLECS®; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar] [CrossRef]
- Frivaldsky, M.; Morgos, J.; Prazenica, M.; Takacs, K. System Level Simulation of Microgrid Power Electronic Systems. Electronics 2021, 10, 644. [Google Scholar] [CrossRef]
- Morales, J.A.; Castro, M.A.; Garcia, D.; Higuera, C.; Sandoval, J. IDA-PBC Controller Tuning Using Steepest Descent. In Numerical and Evolutionary Optimization—NEO 2017; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 158–170. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Variable | Value | Element | Variable | Value | Element | Variable | Value |
|---|---|---|---|---|---|---|---|---|
| Battery Voltage | 24 V | Bus Voltage | 48 V | Inductor | , | 330 mH | ||
| Switching frequency | 2 kHz | Capacitor | C | 44 F |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montoya, O.D.; Serra, F.M.; Gil-González, W.; Asensio, E.M.; Bosso, J.E. An IDA-PBC Design with Integral Action for Output Voltage Regulation in an Interleaved Boost Converter for DC Microgrid Applications. Actuators 2022, 11, 5. https://doi.org/10.3390/act11010005
Montoya OD, Serra FM, Gil-González W, Asensio EM, Bosso JE. An IDA-PBC Design with Integral Action for Output Voltage Regulation in an Interleaved Boost Converter for DC Microgrid Applications. Actuators. 2022; 11(1):5. https://doi.org/10.3390/act11010005
Chicago/Turabian StyleMontoya, Oscar Danilo, Federico Martin Serra, Walter Gil-González, Eduardo Maximiliano Asensio, and Jonathan Emmanuel Bosso. 2022. "An IDA-PBC Design with Integral Action for Output Voltage Regulation in an Interleaved Boost Converter for DC Microgrid Applications" Actuators 11, no. 1: 5. https://doi.org/10.3390/act11010005
APA StyleMontoya, O. D., Serra, F. M., Gil-González, W., Asensio, E. M., & Bosso, J. E. (2022). An IDA-PBC Design with Integral Action for Output Voltage Regulation in an Interleaved Boost Converter for DC Microgrid Applications. Actuators, 11(1), 5. https://doi.org/10.3390/act11010005