
Cutting Mechanism Rotor System Dynamic Characteristics of Cantilever Roadheader under Random Hard Rock Load

Abstract
:1. Introduction
2. Random Cutting Load of Cutting Head
2.1. Random Load of Pick
2.2. Random Load of Cutting Head
3. Dynamics Model
3.1. Bearing Vibration Model
3.2. Dynamic Model of Cutting Head Rotor System
4. Results
5. Experiments
5.1. Experimental Setup
5.2. Test Devices
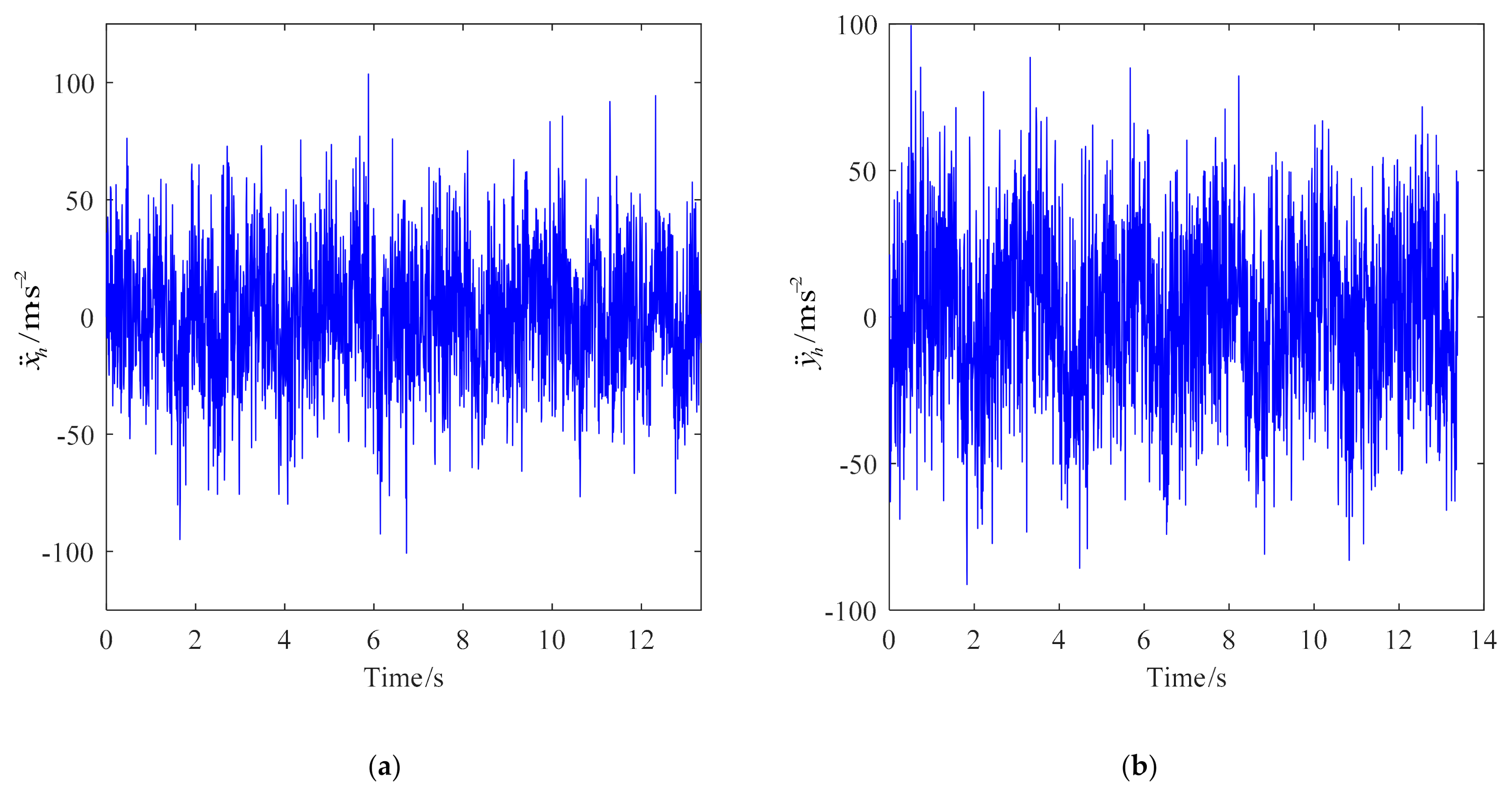
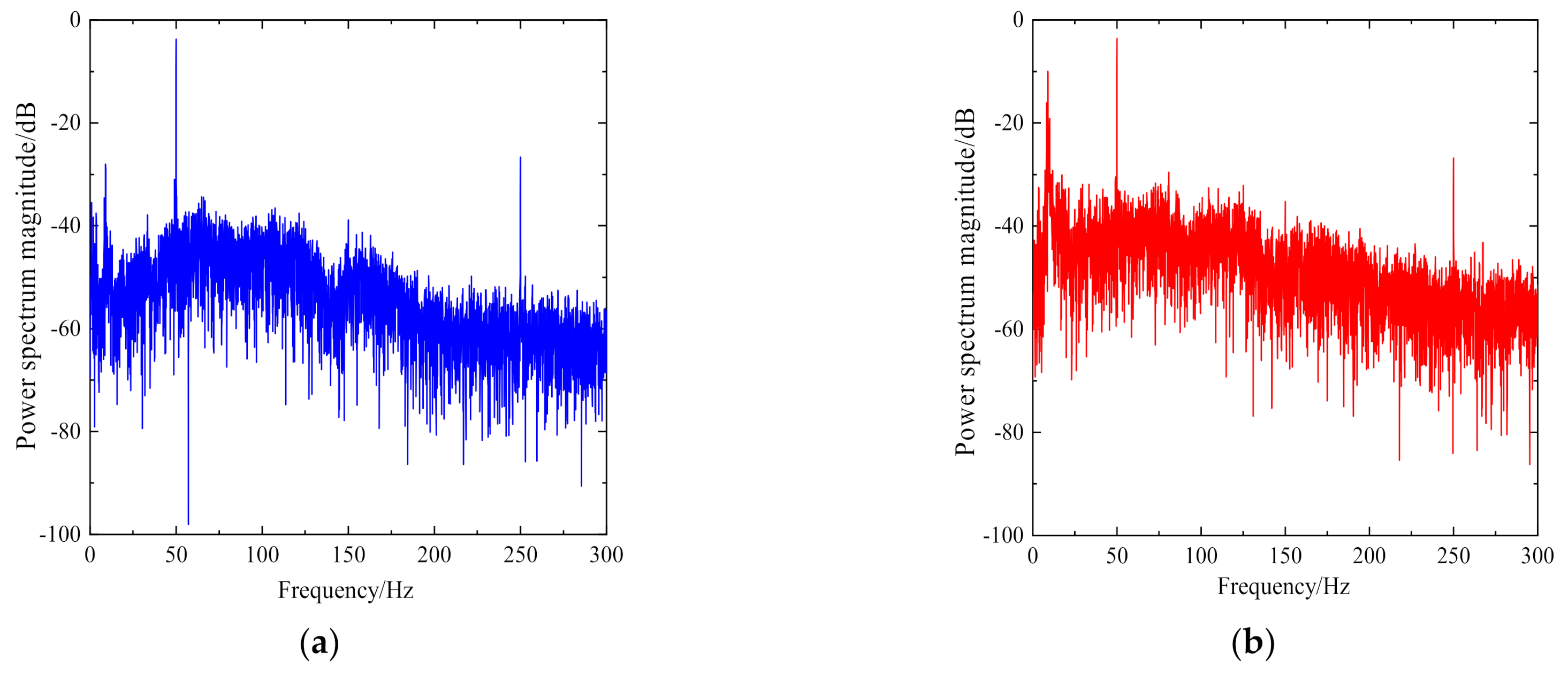
5.3. Experimental Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Seker, S.E.; Ocak, I. Performance prediction of roadheaders using ensemble machine learning techniques. Neural Comput. Appl. 2019, 31, 1103–1116. [Google Scholar] [CrossRef]
- Zhao, X.; Rao, J.; Cheng, C.; Xie, C. Application of cantilever roadheader in tunnel construction. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2019; Volume 330, p. 022023. [Google Scholar] [CrossRef]
- Cheluszka, P. Optimization of the cutting process parameters to ensure high efficiency of drilling tunnels and use the technical potential of the boom-type roadheader. Energies 2020, 13, 6597. [Google Scholar] [CrossRef]
- Zhang, M.; Lyu, F.; Tang, X.; Yang, Y.; Ji, X.; Wu, M. Analysis of vibration of roadheader rotary table based on finite element method and data from underground coalmine. Shock Vib. 2018, 2018, 4396520. [Google Scholar] [CrossRef] [Green Version]
- Zhang, M.; Lyu, F.; Li, C.; Li, X.; Wu, M. The roadheader auto-rectification dynamic analysis and control based on the roadway floor mechanic characteristics. Arab. J. Sci. Eng. 2021, 46, 2649–2661. [Google Scholar] [CrossRef]
- Deshmukh, S.; Raina, A.K.; Murthy, V.M.S.R.; Trivedi, R.; Vajre, R. Roadheader—A comprehensive review. Tunn. Undergr. Space Technol. 2020, 95, 103148. [Google Scholar] [CrossRef]
- Li, S.; Zhang, P.; Xi, C. Impulse processing algorithm for random source signals of roadheaders that is based on compound interferometry. J. Environ. Eng. Geophys. 2021, 26, 13–24. [Google Scholar] [CrossRef]
- Yang, Y.; Li, G.; Yuan, A. Performance analysis of a hybrid power cutting system for roadheader. Math. Probl. Eng. 2017, 2017, 1359592. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, S.; Jia, X.; Cui, Y.; Yao, J. Full coverage cutting path planning of robotized roadheader to improve cutting stability of the coal lane cross-section containing gangue. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 579–592. [Google Scholar] [CrossRef]
- Wang, H.; Sun, D.; Qin, D. A new continuously variable transmission system applied to transmission system of the roadheader’s cutting unit. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 231, 3590–3600. [Google Scholar] [CrossRef]
- Li, Z.; Sun, D.; Qin, Y.; Zhang, W.; Sun, B. Stiffness-damping matching modelling for vibration isolation system of roadheader ECB. Int. J. Acoust. Vib. 2020, 25, 54–61. [Google Scholar] [CrossRef]
- Shen, Y.; Wang, P.; Zheng, W.; Ji, X.; Jiang, H.; Wu, M. Error compensation of strapdown inertial navigation system for the boom-type roadheader under complex vibration. Axioms 2021, 10, 224. [Google Scholar] [CrossRef]
- Li, X.; Gu, Y.Z.; Wu, M. Kinematics analysis of roadheader’s working mechanism based on differential geometry. J. China Coal Soc. 2016, 41, 3158–3166. [Google Scholar]
- Wei, X.H. Dynamic Characteristic Analysis and Performance Prediction of Cutting Process for Boom-Type Roadheader. Ph.D. Thesis, School of Mechatronic Engineering, Liaoning Technical University, Fuxin, China, 2013. [Google Scholar]
- Zhao, L.J.; Tian, Z.; Sun, Y.; Zhou, Z.H. Vibration characteristics of a longitudinal roadheader. J. Vib. Shock. 2013, 32, 17–20. [Google Scholar] [CrossRef]
- Li, X.H.; He, Y.; Li, T.; Yang, T.T. Analysis of horizontal and vertical random vibration responses of longitudinal roadheader. J. China Coal Soc. 2014, 39, 580–585. [Google Scholar] [CrossRef]
- Huang, Z.; Zhang, Z.; Li, Y.; Song, G.; He, Y. Nonlinear dynamic analysis of cutting head-rotor-bearing system of the roadheader. J. Mech. Sci. Technol. 2019, 33, 1033–1043. [Google Scholar] [CrossRef]
- Zhang, M.; Yan, X.; Qin, G. A new method for roadheader pick arrangement based on meshing pick spatial position and rock cutting verification. PLoS ONE 2021, 16, e0260183. [Google Scholar] [CrossRef]
- He, Y.; Tian, M.; Song, J.; Feng, J. Rock hardness identification based on optimized PNN and multi-source data fusion. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 09544062211042048. [Google Scholar] [CrossRef]
- Jiang, H.; Liu, S.; Changlong, D.; Gao, K. Numerical simulation of rock fragmentation process by roadheader pick. J. Vibroeng. 2013, 15, 1807–1817. [Google Scholar]
- Kang, H.; Cho, J.; Park, J.; Jang, J.; Kim, J.; Kim, K.; Rostami, J.; Lee, J. A new linear cutting machine for assessing the rock-cutting performance of a pick cutter. Int. J. Rock Mech. Min. Sci. 2016, 88, 129–136. [Google Scholar] [CrossRef]
- Li, X.; Huang, B.; Ma, G.; Zeng, Q. Study on roadheader cutting load at different properties of coal and rock. Sci. World J. 2013, 2013, 624512. [Google Scholar] [CrossRef] [Green Version]
- Cheluszka, P. Numerical studies of the dynamics of the roadheader equipped with an automatic control system during cutting of rocks with different mechanical properties. Energies 2021, 14, 7353. [Google Scholar] [CrossRef]
- Zong, K.; Fu, S.; Li, X.; Wu, M.; Chu, F. Modelling and response analysis of multibody large-scale displacement of boom-type roadheader. J. Multi-Body Dyn. 2021, 235, 326–337. [Google Scholar] [CrossRef]
- Yasar, S.; Yilmaz, A.O. A novel mobile testing equipment for rock cuttability assessment: Vertical rock cutting rig (VRCR). Rock Mech. Rock Eng. 2017, 50, 857–869. [Google Scholar] [CrossRef]
- Ji, X.; Zhang, M.; Qu, Y.; Jiang, H.; Wu, M. Travel dynamics analysis and intelligent path rectification planning of a roadheader on a roadway. Energies 2021, 14, 7201. [Google Scholar] [CrossRef]
- Cheluszka, P.; Jagiela-Zajac, A. Validation of a Method for Measuring the Position of Pick Holders on a Robotically Assisted Mining Machine’s Working Unit. Energies 2022, 15, 295. [Google Scholar] [CrossRef]
- Bartoszek, S.; Cwikla, G.; Kost, G.; Niespialowski, K. Impact of the Selected Disturbing Factors on Accuracy of the Distance Measurement with the Use of Ultrasonic Transducers in a Hard Coal Mine. Energies 2022, 15, 133. [Google Scholar] [CrossRef]
- Chen, H.; Yang, W.; Ma, Y.; Tian, L. Multi-sensor fusion method for roadheader pose detection. Mechatronics 2021, 80, 102669. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Spline teeth number of cutting spindle z | 49 |
| Spline modulus m (mm) | 5 |
| Spline meshing stiffness kgc (N·m·rad−1) | 3.52 × 108 |
| Spline meshing damping ratio ξgc | 0.1 |
| Cutting spindle weight m1, m2 (kg) | 350, 469 |
| Moment of cutting spindle inertia I1, I2 (kg·m2) | 3.19, 4.06 |
| Bending stiffness of cutting spindle kb (N·m−1) | 6.14 × 108 |
| Torsional stiffness of cutting spindle kt (N·m·rad−1) | 2.39 × 107 |
| Damping ratio of cutting spindle | 0.03 |
| Picks number of cutting head | 38(Number of helices is 2) |
| Weight of cutting head mh (kg) | 1307 |
| Moment of cutting head inertia Ih (kg·m2) | 93.53 |
| Torsional stiffness of cutting head (N·m·rad−1) | 1.24 × 108 |
| Contact stiffness of rolling bearings kc1, kc2 (N·m−1) | 6.52 × 108, 8.34 × 108 |
| Rolling bearing clearances γ01, γ02 (m) | 3 × 10−5, 2 × 10−5 |
| Damping ratio of rolling bearing ξc | 0.02 |
| Number of bearing rollers Nb1, Nb2 | 24, 31 |
| Measuring Point | Direction | No-Load Condition | Horizontal Cutting Condition | ||||
|---|---|---|---|---|---|---|---|
| Maximum Value (m·s−2) | Variance (m2·s−4) | Valid Value (m·s−2) | Maximum Value (m·s−2) | Variance (m2·s−4) | Valid Value (m·s−2) | ||
| cutting head | x | 11.7 | 24.3 | 4.93 | 32.9 | 44.5 | 6.67 |
| y | 11.9 | 25.0 | 5.00 | 36.6 | 46.8 | 6.84 | |
| z | 10.4 | 23.4 | 4.83 | 21.1 | 28.8 | 5.37 | |
| cutting arm | y | 3.3 | 0.3 | 0.51 | 13.5 | 7.5 | 2.74 |
| No. | Measuring Point | Eigenfrequency Point |
|---|---|---|
| (a) | x-direction of the cutting head | (0.8, −36.8), (1.9, −38.4), (3.4, −32.5), (8, −36.4), (9, −28), (50, −3.5), (250, −26) |
| (b) | y-direction of the cutting head | (0.8, −31.7), (1.9, −34.1), (3.4, −37.4), (8, −23.2), (9, −18), (50, −2.9), (250, −30) |
| (c) | z-direction of the cutting head | (0.8, −42.3), (3.1, −37.4), (3.4, −32.5), (8, −16.7), (9, −10), (50, −3.7), (250, −27) |
| (d) | y-direction of the cutting arm | (1.3, −36.1), (1.9, −34.5), (3.4, −44.7), (7, −27.9), (9, −27.4), (50, −32), (230, −43.5) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Chen, S.; Liu, Y.; Wang, H.; Cao, C. Cutting Mechanism Rotor System Dynamic Characteristics of Cantilever Roadheader under Random Hard Rock Load. Actuators 2022, 11, 83. https://doi.org/10.3390/act11030083
Zhang Z, Chen S, Liu Y, Wang H, Cao C. Cutting Mechanism Rotor System Dynamic Characteristics of Cantilever Roadheader under Random Hard Rock Load. Actuators. 2022; 11(3):83. https://doi.org/10.3390/act11030083
Chicago/Turabian StyleZhang, Zhonghai, Shiqi Chen, Yutao Liu, Hao Wang, and Chao Cao. 2022. "Cutting Mechanism Rotor System Dynamic Characteristics of Cantilever Roadheader under Random Hard Rock Load" Actuators 11, no. 3: 83. https://doi.org/10.3390/act11030083
APA StyleZhang, Z., Chen, S., Liu, Y., Wang, H., & Cao, C. (2022). Cutting Mechanism Rotor System Dynamic Characteristics of Cantilever Roadheader under Random Hard Rock Load. Actuators, 11(3), 83. https://doi.org/10.3390/act11030083