
Pneumatic Soft Robots: Challenges and Benefits




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- The traditional pneumatic or cable drive-based research, such as the German company Festo’s pneumatic soft robot and pneumatic artificial muscle and so on [3]. The pneumatic and cable drive-based soft robot research has been investigated for over 20 years. Various actuators and control techniques have been developed.
- (2)
- Elastic silicone material is used as the main material of the soft robot, combining with the latest 3D printing technology. These robots are primarily characterized by pneumatic driven, small pressure-bearing, large deformation, and flexible motion control [4].
- (3)
- Using advanced smart materials, such as dielectric elastomer (DE) [5], shape memory alloy (SMA) [6] to generate motion by deformation of materials, which is a new application of smart materials in the field of soft robotics and it has a broad application prospect in the field of micro and small robots. Soft robots can be driven by gas, wire, smart material, and so on [7]. Among them, pneumatic technology was firstly used in the design of soft robots and had the characteristics of lightweight, good flexibility, and strong adaptability to the environment. Moreover, the pneumatic soft robot can be driven without ferromagnetic or electronic components with good reliability under harsh conditions under the strong radiation [8], electromagnetic interference [9], dust, external extrusion, and heavy impacts [7]. It has been well recognized that the pneumatic soft robot has occupied an important position in the research of soft robotics. This article reviews the status and the main progress of the recent research on pneumatic soft robots. This article aims to investigate the solutions to develop and research the pneumatic soft robot.
2. Pneumatic Soft Actuators
2.1. Pneumatic Networks
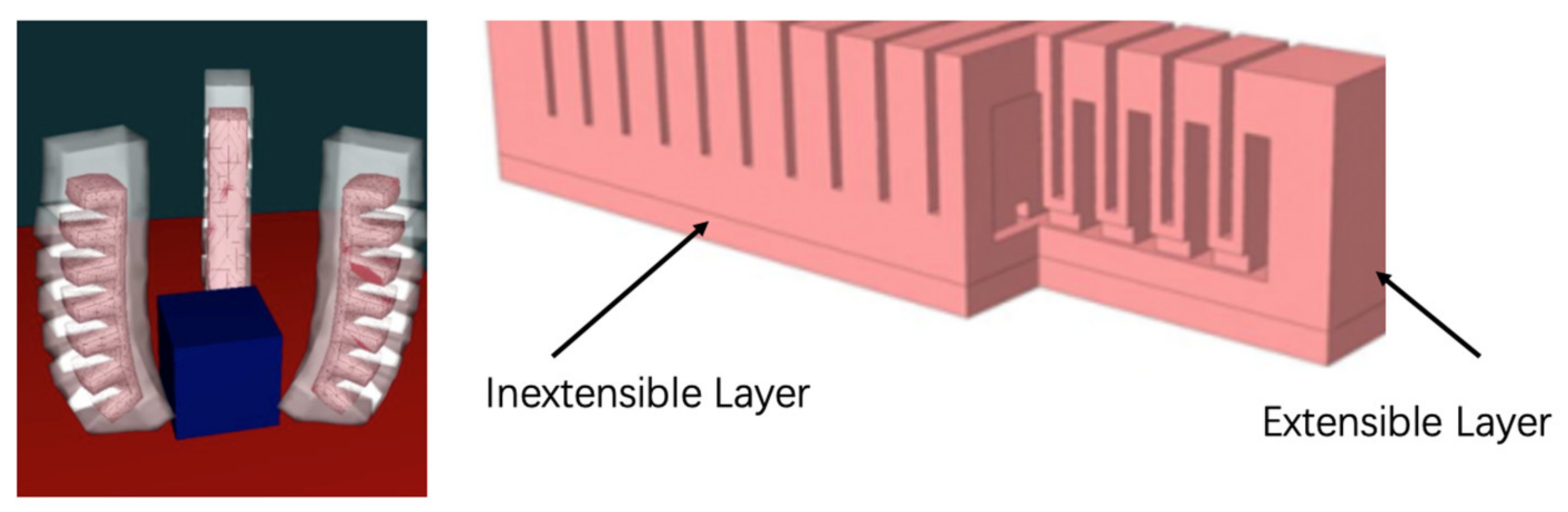
2.1.1. Flexible Fluidic Actuator (FFA)
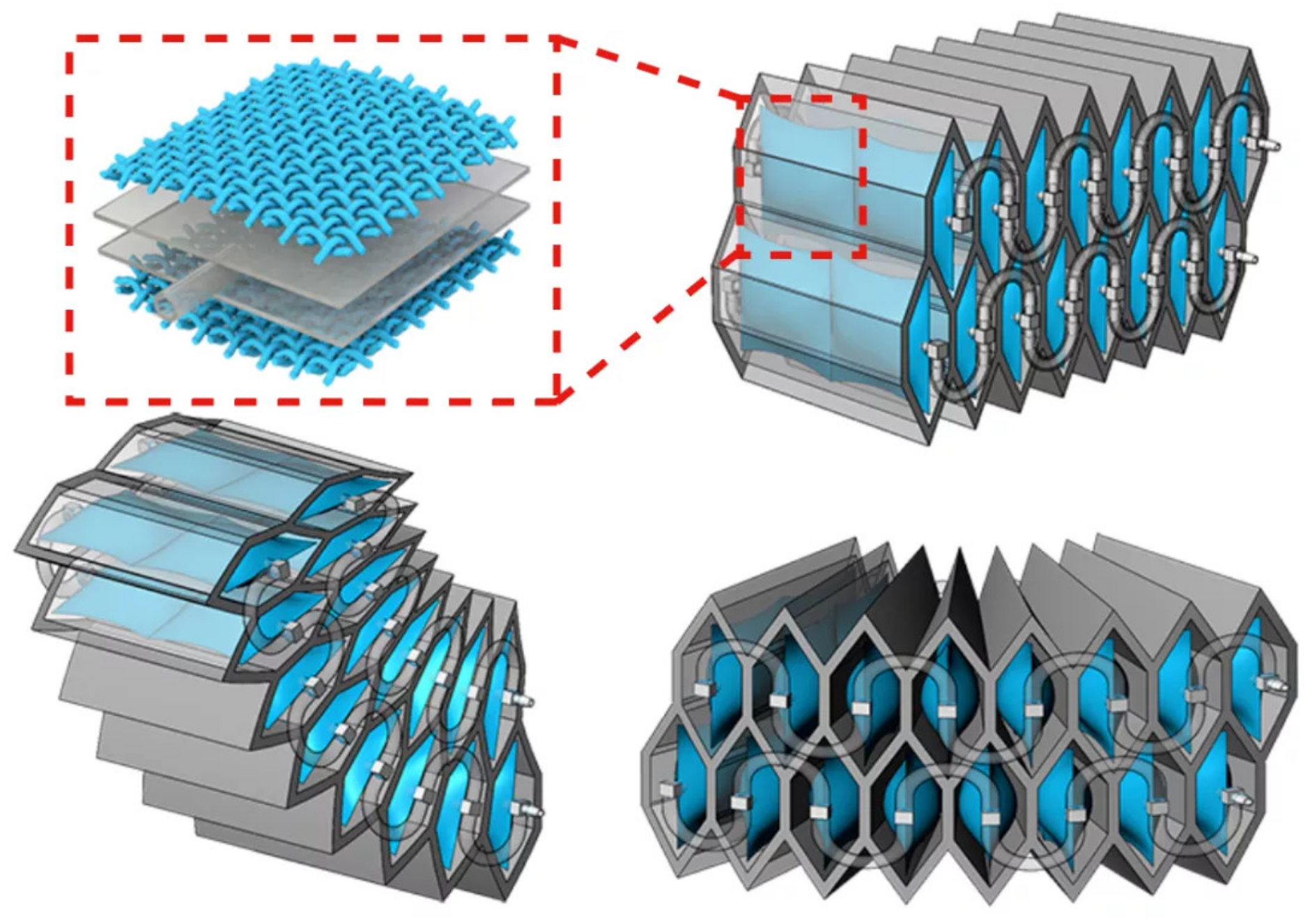
2.1.2. Honeycomb Pneumatic Networks
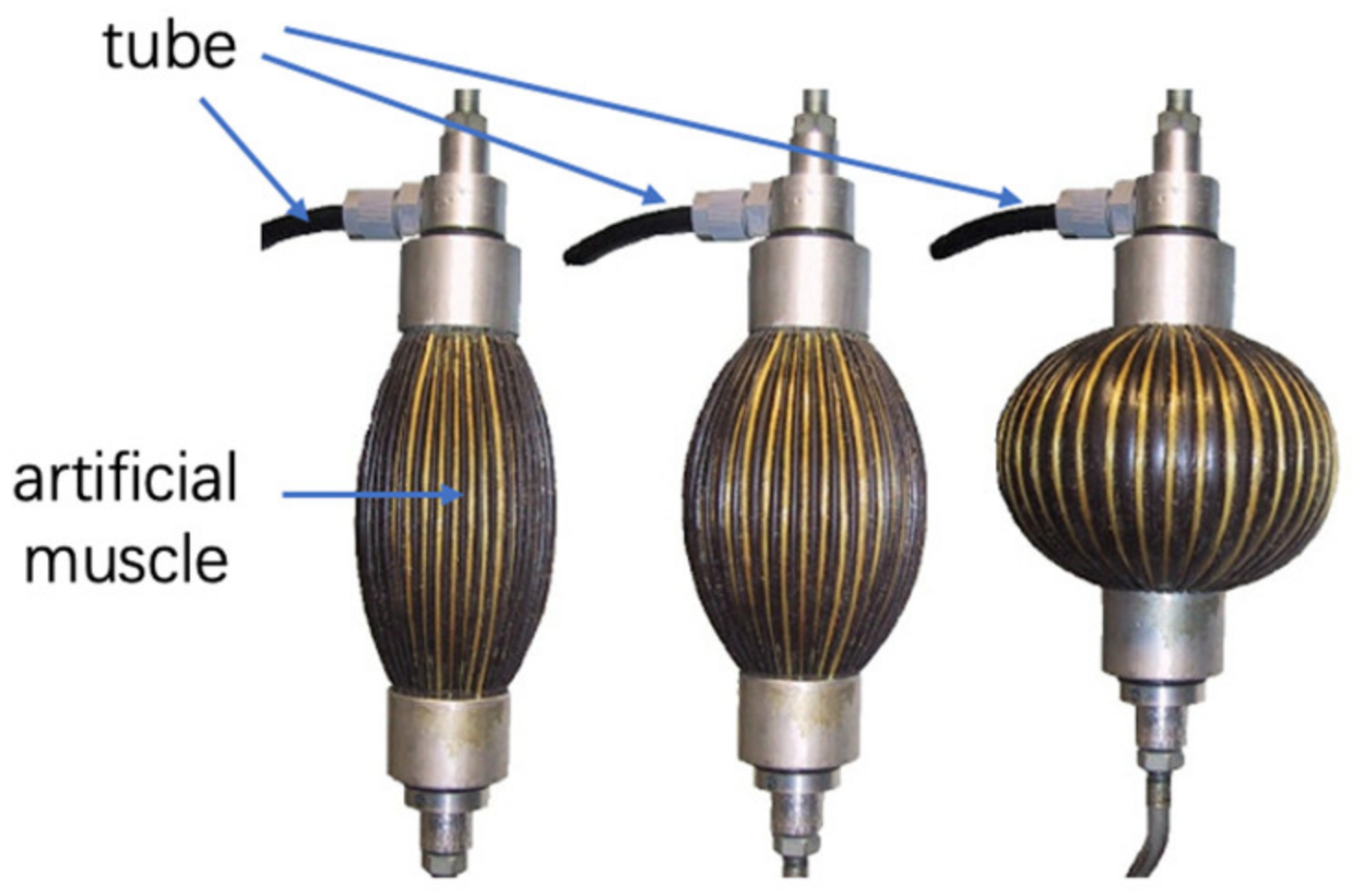
2.2. Fiber-Constrained Actuators
- (1)
- Lightweight and small size. Since the main material of pneumatic artificial muscle is rubber (such as neoprene, acrylate rubber, etc.), and aluminum alloy’s metal connection [16], its overall mass is very light. For example, the pneumatic muscle of 5 mm inner diameter produced by Festo is only 27 g per meter.
- (2)
- High gravimetric specific power. The power to weight ratio of pneumatic artificial muscles is very large [17]. For example, a pneumatic artificial muscle with a 20 mm inner diameter is sufficient to provide 1500 N of pulling force, which can satisfy the load demand in practical applications.
- (3)
- Easy installation and smooth motion. Compared with conventional motors, pneumatic artificial muscles do not need to be assembled with gearboxes and other transmission devices. They can be configured in the robot frame by simply connecting sealed plugs and air hoses. Moreover, compared with cylinders, pneumatic muscles do not have sliding parts such as pistons and can be driven more smoothly, and the efficiency of pneumatic potential energy-mechanical energy conversion can be significantly improved [18].
- (4)
- Clean and safe. Pneumatic artificial muscles’ energy source is clean and environmentally friendly, and the movement process will not pollute the environment. At the same time, the pneumatic artificial muscle has good suppleness, which can drive the robot well to achieve flexible active/passive suppleness control in many narrow working environments, or on occasions with strong human-robot interaction, such as surgery and gait rehabilitation training [19]. It is well known that the characteristics of pneumatic artificial muscles have benefits and some shortcomings due to the specific physical structure. This can be summarized as follows:
- Nonlinear and time-varying characteristics. Influenced by the internal compressed air, the pneumatic artificial muscle shows a complex nonlinear relationship between air pressure and contraction length, and its system parameters can often be identified only within a short period of operating air pressure, which poses a challenge to establishing an accurate kinetic model in the entire operating air pressure range [20,21].
- Hysteresis and creep characteristics. Considering the existence of friction between the braided mesh and rubber tube, the elastic deformation of the rubber tube during contraction or diastole, the pneumatic artificial muscle usually has hysteresis and creep effect, which affects the rise of output force [22].
3. Development and Control of the Pneumatic Soft Actuators
3.1. Development of Soft Pneumatic Robots
3.2. Modeling of Soft Pneumatic Robots
3.3. Control of Soft Pneumatic Robots
3.3.1. Control of Pneumatic Networks
3.3.2. Control of Pneumatic Muscle
4. Challenges and Benefits in the Application
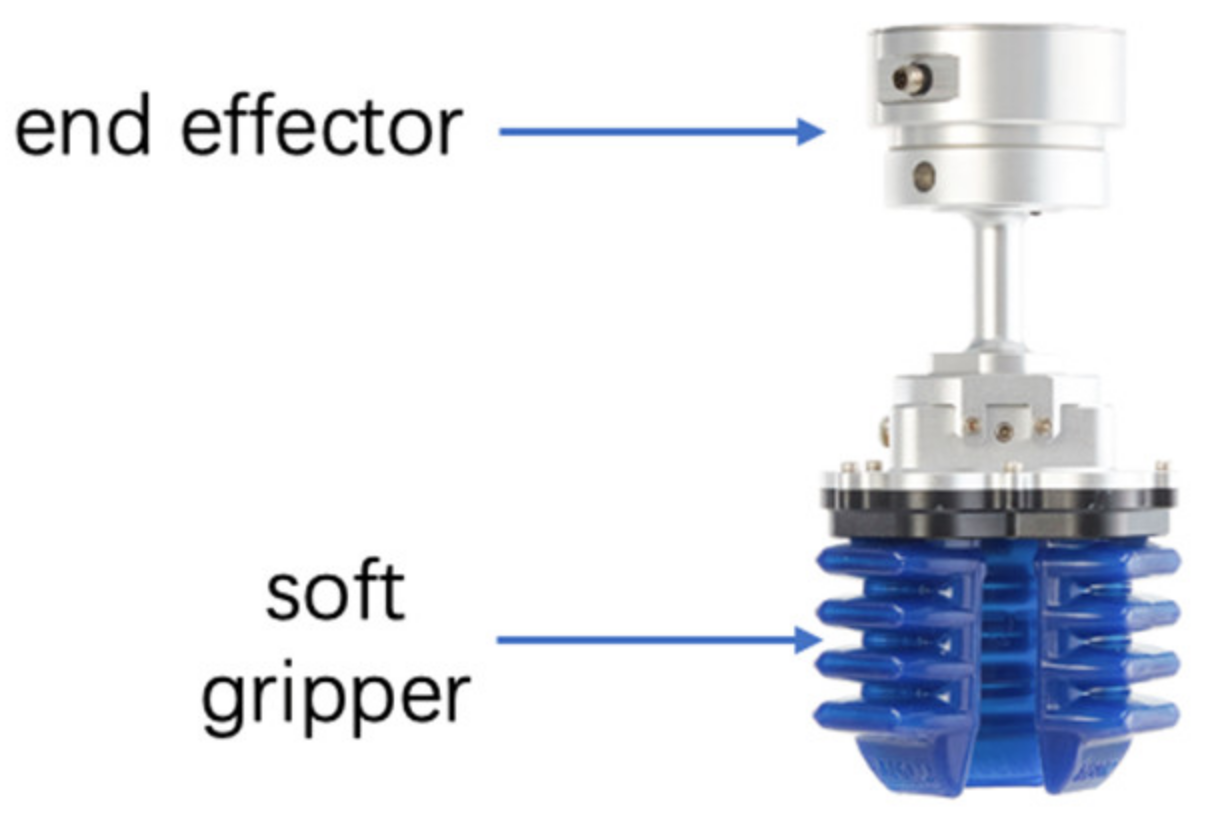
4.1. Griper in the Manufacturing
4.2. Bionic Application
4.3. Medical Application
5. Summary and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Leng, J.; Sun, J.; Guan, Q.; Liu, Y. Status of and trends in soft pneumatic robotics. Sci. Sin. Technol. 2020, 50, 897–934. [Google Scholar] [CrossRef]
- Albu-Schaffer, A.; Eiberger, O.; Grebenstein, M.; Haddadin, S.; Ott, C.; Wimbock, T.; Wolf, S.; Hirzinger, G. Soft robotics. IEEE Robot. Autom. Mag. 2008, 15, 20–30. [Google Scholar] [CrossRef]
- Rolf, M.; Steil, J.J. Constant curvature continuum kinematics as fast approximate model for the bionic handling assistant. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; IEEE: Piscataway, NJ, USA, 2012; p. 6385596. [Google Scholar]
- Wehner, M.; Truby, R.L.; Fitzgerald, D.J.; Mosadegh, B.; Whitesides, G.M.; Lewis, J.A.; Wood, R.J. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 2016, 536, 451–455. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Zhu, Y.; Zhao, D.; Luan, Y. Performance investigation of cone dielectric elastomer actuator using Taguchi method. Chin. J. Mech. Eng. 2011, 24, 685–692. [Google Scholar] [CrossRef] [Green Version]
- Laschi, C.; Cianchetti, M.; Mazzolai, B. Soft robot arm inspired by the octopus. Adv. Robot. 2012, 26, 709–727. [Google Scholar] [CrossRef]
- Tolley, M.T.; Shepherd, R.F.; Galloway, K.C.; Wood, R.J.; Whitesides, G.M. A resilient, untethered soft robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Yirmibeşoğlu, O.D.; Oshiro, T.T.; Olson, G.; Palmer, C.; Mengüç, Y. Evaluation of 3d printed soft robots in radiation environments and comparison with molded counterparts. Front. Robot. AI 2019, 6, 40. [Google Scholar] [CrossRef] [Green Version]
- Yap, H.K.; Kamaldin, N.; Lim, J.H.; Nasrallah, F.A.; Goh, J.C.H.; Yeow, C.H. A magnetic resonance compatible soft wearable robotic glove for hand rehabilitation and brain imaging. IEEE Trans. Neural. Syst. Rehabil. Eng. 2017, 6, 782–793. [Google Scholar] [CrossRef]
- Yan, J.H.; Shi, P.P.; Zhang, X.B. Review of biomimetic mechanism, actuation, modeling and control in soft manipulators. J. Mech. Eng. 2018, 54, 1–14. [Google Scholar] [CrossRef]
- Galloway, K.C.; Polygerinos, P.; Walsh, C.J.; Wood, R.J. Mechanically programmable bend radius for fiber-reinforced soft actuators. In Proceedings of the 2013 16th International Conference on Advanced Robotics (ICAR), Montevideo, Uruguay, 25–29 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–6. [Google Scholar]
- Helps, T.; Rossiter, J. Proprioceptive flexible fluidic actuators using conductive working fluids. Soft Robot. 2018, 5, 175–189. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fengyu, X.; Fanchang, M.; Baojie, F.; Gaoliang, P.; Jingjin, S.; Guoping, J. Review of driving methods, modeling and application in soft robots. J. Nanjing Univ. Posts Telecommun. 2019, 39, 64–75. [Google Scholar]
- Jiang, H.; Wang, Z.; Jin, Y.; Chen, X.; Li, P.; Gan, Y.; Chen, X. Hierarchical control of soft manipulators towards unstructured interactions. Int. J. Robot. Res. 2021, 40, 411–434. [Google Scholar] [CrossRef]
- Tondu, B.; Lopez, P. Modeling and control of McKibben artificial muscle robot actuators. IEEE Control Syst. Mag. 2000, 20, 15–38. [Google Scholar]
- Liang, D.; Chen, Y.; Sun, N.; Wu, Y.; Liu, L.; Fang, Y. Overview of control methods for pneumatic artificial muscle-actuated robots. Control Decis. 2021, 36, 27–41. [Google Scholar]
- Robinson, R.M.; Kothera, C.S.; Wereley, N.M. Variable recruitment testing of pneumatic artificial muscles for robotic manipulators. IEEE/ASME Trans. Mechatron. 2015, 20, 1642–1652. [Google Scholar] [CrossRef]
- Wakimoto, S.; Misumi, J.; Suzumori, K. New concept and fundamental experiments of a smart pneumatic artificial muscle with a conductive fiber. Sensors and Actuators A. Physical 2016, 250, 48–54. [Google Scholar]
- Zheng, H.; Wu, M.L.; Shen, X.R. Pneumatic variable series elastic actuator. J. Dyn. Syst. Meas. Control 2016, 138, 081011. [Google Scholar] [CrossRef] [Green Version]
- Daerden, F.; Lefeber, D. Pneumatic artificial muscles: Actuators for robotics and automation. Eur. J. Mech. Environ. Eng. 2002, 47, 11–21. [Google Scholar]
- Zhang, D.; Zhao, X.; Han, J. Active model-based control for pneumatic artificial muscle. IEEE Trans. Ind. Electron. 2016, 64, 1686–1695. [Google Scholar] [CrossRef]
- Felt, W.; Chin, K.Y.; Remy, C.D. Contraction sensing with smart braid McKibben muscles. IEEE/ASME Trans. Mechatron. 2015, 21, 1201–1209. [Google Scholar] [CrossRef]
- Wallin, T.J.; Pikul, J.; Shepherd, R.F. 3D printing of soft robotic systems. Nat. Rev. Mater. 2018, 3, 84–100. [Google Scholar] [CrossRef]
- Truby, R.L.; Lewis, J.A. Printing soft matter in three dimensions. Nature 2016, 540, 371–378. [Google Scholar] [CrossRef] [PubMed]
- Rajappan, A.; Jumet, B.; Preston, D.J. Pneumatic soft robots take a step toward autonomy. Sci. Robot. 2021, 6, eabg6994. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Chen, Y.; Ren, T.; Li, Y.; Choi, S.H. Precharged Pneumatic Soft Actuators and Their Applications to Untethered Soft Robots. Soft Robot. 2018, 5, 567–575. [Google Scholar] [CrossRef]
- Scharff, R.B.N.; Fang, G.; Tian, Y.; Wu, J.; Geraedts, J.M.P.; Wang, C.C.L. Sensing and Reconstruction of 3-D Deformation on Pneumatic Soft Robots. IEEE/ASME Trans. Mechatron. 2021, 26, 1877–1885. [Google Scholar] [CrossRef]
- Breitman, P.; Matia, Y.; Gat, A.D. Fluid Mechanics of Pneumatic Soft Robots. Soft Robot. 2021, 8, 519–530. [Google Scholar] [CrossRef] [PubMed]
- He, Q.; Cai, S. Soft pumps for soft robots. Sci. Robot. 2021, 6, eabg6640. [Google Scholar] [CrossRef] [PubMed]
- Rus, D.; Tolley, M.T. Design, fabrication and control of origami robots. Nat. Rev. Mater. 2018, 3, 101–112. [Google Scholar] [CrossRef]
- Gul, J.Z.; Yang, B.S.; Yang, Y.J.; Chang, D.E.; Choi, K.H. In situ UV curable 3D printing of multi-material tri-legged soft bot with spider mimicked multi-step forward dynamic gait. Smart Mater. Struct. 2016, 25, 115009. [Google Scholar] [CrossRef] [Green Version]
- Hinton, T.J.; Jallerat, Q.; Palchesko, R.N.; Park, J.H.; Grodzicki, M.S.; Shue, H.J.; Ramadan, M.H.; Hudson, A.R.; Feinberg, A.W. 3D printing PDMS elastomer in a hydrophilic support bath via freeform reversible embedding. ACS Biomater. Sci. Eng. 2016, 2, 1781–1786. [Google Scholar] [CrossRef] [PubMed]
- Hinton, T.J.; Jallerat, Q.; Palchesko, R.N.; Park, J.H.; Grodzicki, M.S.; Shue, H.J.; Ramadan, M.H.; Hudson, A.R.; Feinberg, A.W. Three-dimensional printing of complex biological structures by freeform reversible embedding of suspended hydrogels. Sci. Adv. 2015, 1, e1500758. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nyberg, E.L.; Farris, A.L.; Hung, B.P.; Dias, M.; Garcia, J.R.; Dorafshar, A.H.; Grayson, W.L. 3D-printing technologies for craniofacial rehabilitation, reconstruction, and regeneration. Ann. Biomed. Eng. 2017, 45, 45–57. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rossiter, J.; Walters, P.; Stoimenov, B. Printing 3D dielectric elastomer actuators for soft robotics[C]//Electroactive polymer actuators and devices (EAPAD) 2009. Int. Soc. Opt. Photonics 2009, 7287, 72870H. [Google Scholar]
- Landgraf, M.; Reitelshöfer, S.; Franke, J.; Hedges, M. Aerosol jet printing and lightweight power electronics for dielectric elastomer actuators. In Proceedings of the 2013 3rd International Electric Drives Production Conference (EDPC), Nuremberg, Germany, 29–30 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–7. [Google Scholar]
- Carreño-Morelli, E.; Martinerie, S.; Bidaux, J.E. Three-dimensional printing of shape memory alloys. Trans. Tech. Publ. Ltd. 2007, 534, 477–480. [Google Scholar]
- Qiao, H.; Chen, J.; Huang, X. A Survey of Brain-Inspired Intelligent Robots: Integration of Vision, Decision, Motion Control, and Musculoskeletal Systems. IEEE Trans. Cybern. 2021, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Kramer, R.K.; Majidi, C.; Wood, R.J. Wearable tactile keypad with stretchable artificial skin. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1103–1107. [Google Scholar]
- Park, Y.L.; Chen, B.R.; Wood, R.J. Design and fabrication of soft artificial skin using embedded microchannels and liquid conductors. IEEE Sens. J. 2012, 12, 2711–2718. [Google Scholar] [CrossRef]
- Farrow, N.; Correll, N. A soft pneumatic actuator that can sense grasp and touch. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2317–2323. [Google Scholar]
- Bilodeau, R.A.; White, E.L.; Kramer, R.K. Monolithic fabrication of sensors and actuators in a soft robotic gripper. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 2324–2329. [Google Scholar]
- Ozel, S.; Keskin, N.A.; Khea, D.; Onal, C.D. A precise embedded curvature sensor module for soft-bodied robots. Sens. Actuators A Phys. 2015, 236, 349–356. [Google Scholar] [CrossRef]
- Dobrzynski, M.K.; Pericet-Camara, R.; Floreano, D. Contactless deflection sensor for soft robots. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1913–1918. [Google Scholar]
- Ozel, S.; Skorina, E.H.; Luo, M.; Tao, W.; Chen, F.; Pan, Y.; Onal, C.D. A composite soft bending actuation module with integrated curvature sensing. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Sweden, Sweden, 16–21 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 4963–4968. [Google Scholar]
- Sun, Y.; Song, S.; Liang, X.; Ren, H. A miniature soft robotic manipulator based on novel fabrication methods. IEEE Robot. Autom. Lett. 2016, 1, 617–623. [Google Scholar] [CrossRef]
- Sareh, S.; Jiang, A.; Faragasso, A.; Noh, Y.; Nanayakkara, T.; Dasgupta, P.; Seneviratne, L.D.; Wurdemann, H.A.; Althoefer, K. Bio-inspired tactile sensor sleeve for surgical soft manipulators. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1454–1459. [Google Scholar]
- Searle, T.C.; Althoefer, K.; Seneviratne, L.; Liu, H. An optical curvature sensor for flexible manipulators. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 4415–4420. [Google Scholar]
- Sareh, S.; Noh, Y.; Li, M.; Ranzani, T.; Liu, H.; Althoefer, K. Macrobend optical sensing for pose measurement in soft robot arms. Smart Mater. Struct. 2015, 24, 125024. [Google Scholar] [CrossRef]
- Wurdemann, H.A.; Sareh, S.; Shafti, A.; Noh, Y.; Faragasso, A.; Chathuranga, D.S.; Liu, H.; Hirai, S.; Althoefer, K. Embedded electro-conductive yarn for shape sensing of soft robotic manipulators. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 8026–8029. [Google Scholar]
- Zhang, J.J.; Yin, Y.H.; Zhu, J.Y. Electrical resistivity-based study of self-sensing properties for shape memory alloy-actuated artificial muscle. Sensors 2013, 13, 12958–12974. [Google Scholar] [CrossRef]
- Mannsfeld, S.C.; Tee, B.C.; Stoltenberg, R.M.; Chen, C.V.; Barman, S.; Muir, B.V.; Sokolov, A.N.; Reese, C.; Bao, Z. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef] [PubMed]
- Tianmiao, W.; Yufei, H.A.O.; Xingbang, Y.; Wen, L. Soft robotics: Structure, actuation, sensing and control. J. Mech. Eng. 2017, 53, 1–13. [Google Scholar]
- Li, X.; Sun, K.; Guo, C.; Liu, T.; Liu, H. Enhanced static modeling of commercial pneumatic artificial muscles. Assem. Autom. 2020, 40, 407–417. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, L.; Galloway, K.; Godage, I.; Simaan, N.; Barth, E. Modal-Based Kinematics and Contact Detection of Soft Robots. Soft Robot. 2021, 8, 298–309. [Google Scholar] [CrossRef]
- Hannan, M.W.; Walker, I.D. Kinematics and the implementation of an elephant’s trunk manipulator and other continuum style robots. J. Robot. Syst. 2003, 20, 45–63. [Google Scholar] [CrossRef]
- Webster, R.J., III; Jones, B.A. Design and kinematic modeling of constant curvature continuum robots: A review. Int. J. Robot. Res. 2010, 29, 1661–1683. [Google Scholar] [CrossRef]
- Trivedi, D.; Lotfi, A.; Rahn, C.D. Geometrically exact models for soft robotic manipulators. IEEE Trans. Robot. 2008, 24, 773–780. [Google Scholar] [CrossRef]
- Martin, A.; Barrientos, A.; Del Cerro, J. The natural-CCD algorithm, a novel method to solve the inverse kinematics of hyper-redundant and soft robots. Soft Robot. 2018, 5, 242–257. [Google Scholar] [CrossRef]
- Renda, F.; Boyer, F.; Dias, J.; Seneviratne, L. Discrete cosserat approach for multisection soft manipulator dynamics. IEEE Trans. Robot. 2018, 34, 1518–1533. [Google Scholar] [CrossRef] [Green Version]
- Hyatt, P.; Kraus, D.; Sherrod, V.; Rupert, L.; Day, N.; Killpack, M.D. Configuration estimation for accurate position control of large-scale soft robots. IEEE/ASME Trans. Mechatron. 2018, 24, 88–99. [Google Scholar] [CrossRef]
- Rogers, E.; Polygerinos, P.; Walsh, C.; Goldfield, E. Smart and connected actuated mobile and sensing suit to encourage motion in developmentally delayed infants. J. Med. Devices 2015, 9, 3. [Google Scholar] [CrossRef]
- Park, Y.L.; Wood, R.J. Smart pneumatic artificial muscle actuator with embedded microfluidic sensing. In Proceedings of the SENSORS 2013 IEEE, Baltimore, MD, USA, 3–6 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–4. [Google Scholar]
- Galloway, K.C.; Chen, Y.; Templeton, E.; Rife, B.; Godage, I.S.; Barth, E.J. Fiber Optic Shape Sensing for Soft Robotics. Soft Robot. 2019, 6, 671–684. [Google Scholar] [CrossRef] [PubMed]
- Polygerinos, P.; Wang, Z.; Overvelde, J.T.; Galloway, K.C.; Wood, R.J.; Bertoldi, K.; Walsh, C.J. Modeling of soft fiber-reinforced bending actuators. IEEE Trans. Robot. 2015, 31, 778–789. [Google Scholar] [CrossRef] [Green Version]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bruder, D.; Gillespie, B.; Remy, C.D.; Vasudevan, R. Modeling and control of soft robots using the koopman operator and model predictive control. arXiv 2019, arXiv:1902.02827. [Google Scholar]
- Yu, X.; He, W.; Li, Y.; Xue, C.; Li, J.; Zou, J.; Yang, C. Bayesian estimation of human impedance and motion intention for human-robot collaboration. IEEE Trans. Cybern. 2019, 51, 1822–1834. [Google Scholar] [CrossRef] [PubMed]
- Zhong, S.; Zhou, J.; Qiao, H. Bioinspired Gain-Modulated Recurrent Neural Network for Controlling Musculoskeletal Robot. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–15. [Google Scholar] [CrossRef] [PubMed]
- He, W.; Sun, Y.; Yan, Z.; Yang, C.; Li, Z.; Kaynak, O. Disturbance observer-based neural network control of cooperative multiple manipulators with input saturation. IEEE Trans. Neural Netw. Learn. Syst. 2019, 31, 1735–1746. [Google Scholar] [CrossRef]
- Su, H.; Mariani, A.; Ovur, S.E.; Menciassi, A.; Ferrigno, G.; De Momi, E. Toward Teaching by Demonstration for Robot-Assisted Minimally Invasive Surgery. IEEE Trans. Autom. Sci. Eng. 2021, 18, 484–494. [Google Scholar] [CrossRef]
- Chen, J.; Qiao, H. Motor-Cortex-Like Recurrent Neural Network and Multi-Tasks Learning for the Control of Musculoskeletal Systems. IEEE Trans. Cogn. Dev. Syst. 2020, 1. [Google Scholar] [CrossRef]
- He, W.; Xue, C.; Yu, X.; Li, Z.; Yang, C. Admittance-based controller design for physical human–robot interaction in the constrained task space. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1937–1949. [Google Scholar] [CrossRef]
- Xu, F.; Wang, H.; Chen, W.; Wang, J. Adaptive visual servoing control for an underwater soft robot. Assem. Autom. 2018, 38, 669–677. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Falotico, E.; Renda, F.; Laschi, C. Model-based reinforcement learning for closed-loop dynamic control of soft robotic manipulators. IEEE Trans. Robot. 2018, 35, 124–134. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, W.; Hao, D.; Yun, C. Hysteresis Modeling and Application of Mckibben Pneumatic Artificial Muscles. J. Mech. Eng. 2019, 55, 73–80. [Google Scholar] [CrossRef]
- Pedro, P.; Ananda, C.; Rafael, P.B.; Carlos, A.R.; Alexandre, B.C. Closed structure soft robotic gripper. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 66–70. [Google Scholar]
- Lenz, A.; Anderson, S.R.; Pipe, A.G.; Melhuish, C.; Dean, P.; Porrill, J. Cerebellar-inspired adaptive control of a robot eye actuated by pneumatic artificial muscles. IEEE Trans. Syst. Man Cybern. Part B 2009, 39, 1420–1433. [Google Scholar] [CrossRef] [PubMed]
- Cao, Y.; Huang, J.; Xiong, C. Single-layer Learning Based Predictive Control with Echo State Network for Pneumatic Muscle Actuators-driven Exoskeleton. IEEE Trans. Cogn. Dev. Syst. 2020, 13, 80–90. [Google Scholar] [CrossRef]
- Anh, H.P.H.; Son, N.N.; Van Kien, C. Adaptive neural compliant force-position control of serial PAM robot. J. Intell. Robot. Syst. 2018, 89, 351–369. [Google Scholar] [CrossRef]
- Sekine, T.; Wang, Y.F.; Hong, J.; Takeda, Y.; Miura, R.; Watanabe, Y.; Abe, M.; Mori, Y.; Wang, Z.; Kumaki, D.; et al. Artificial Cutaneous Sensing of Object Slippage using Soft Robotics with Closed-Loop Feedback Process. Small Sci. 2021, 1, 2100002. [Google Scholar] [CrossRef]
- Robinson, R.M.; Kothera, C.S.; Sanner, R.M.; Wereley, N.M. Nonlinear control of robotic manipulators driven by pneumatic artificial muscles. IEEE/ASME Trans. Mechatron. 2015, 21, 55–68. [Google Scholar] [CrossRef]
- Causey, G. Guidelines for the design of robotic gripping systems. Assem. Autom. 2003, 23, 18–28. [Google Scholar] [CrossRef] [Green Version]
- Grzesiak, A.; Becker, R.; Verl, A. The bionic handling assistant: A success story of additive manufacturing. Assem. Autom. 2011, 31, 329–334. [Google Scholar] [CrossRef]
- Li, Y.; Liu, Y.; Yamazaki, K.; Bai, M.; Chen, Y. Development of a Soft Robot Based Photodynamic Therapy for Pancreatic Cancer. IEEE/ASME Trans. Mechatron. 2021, 26, 2977–2985. [Google Scholar] [CrossRef]
- Liu, Q.; Shi, C.; Zhang, B.; Wang, C.; Duan, L.; Sun, T.; Zhang, X.; Li, W.; Wu, Z.; Fujie, M.G. Development of a novel paediatric surgical assist robot for tissue manipulation in a narrow workspace. Assem. Autom. 2017, 37, 335–348. [Google Scholar] [CrossRef]
- Mayer, A.; Müller, D.; Raisch, A.; Hildebrandt, A.; Sawodny, O. Demonstration-based Programming of Multi-Point Trajectories for Collaborative Continuum Robots. IFAC-PapersOnLine 2019, 52, 513–518. [Google Scholar] [CrossRef]
- Müller, D.; Veil, C.; Seidel, M.; Sawodny, O. One-Shot kinesthetic programming by demonstration for soft collaborative robots. Mechatronics 2020, 70, 102418. [Google Scholar] [CrossRef]
- Driscoll, S.W.; Giori, N.J. Continuous passive motion (CPM): Theory and principles of clinical application. J. Rehabil. Res. Dev. 2000, 37, 179–188. [Google Scholar]
- Yu, Q.; Shang, W.; Zhao, Z.; Cong, S.; Li, Z. Robotic Grasping of Unknown Objects Using Novel Multilevel Convolutional Neural Networks: From Parallel Gripper to Dexterous Hand. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1730–1741. [Google Scholar] [CrossRef]
- Zhou, J.; Li, Z.; Li, X.; Wang, X.; Song, R. Human-Robot Cooperation Control Based on Trajectory Deformation Algorithm for a Lower Limb Rehabilitation Robot. IEEE/ASME Trans. Mechatron. 2021, 26, 3128–3138. [Google Scholar] [CrossRef]
- Heung, K.H.; Tang, Z.Q.; Ho, L.; Tung, M.; Li, Z.; Tong, R.K. Design of a 3D printed soft robotic hand for stroke rehabilitation and daily activities assistance. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 65–70. [Google Scholar]
- Connolly, C. Pneumatic modules for automatic applications. Assem. Autom. 2009, 29, 321–325. [Google Scholar] [CrossRef]
- Wang, C.; Li, S. Research Status of the Soft Robot. Micronanoelectron. Technol. 2019, 56, 948–991. [Google Scholar]
- Su, H.; Yang, C.; Ferrigno, G.; De Momi, E. Improved Human–Robot Collaborative Control of Redundant Robot for Teleoperated Minimally Invasive Surgery. IEEE Robot. Autom. Lett. 2019, 4, 1447–1453. [Google Scholar] [CrossRef] [Green Version]
- Su, H.; Qi, W.; Hu, Y.; Karimi, H.R.; Ferrigno, G.; De Momi, E. An Incremental Learning Framework for Human-Like Redundancy Optimization of Anthropomorphic Manipulators. IEEE Trans. Ind. Inform. 2020, 18, 1864–1872. [Google Scholar] [CrossRef]
- Runciman, M.; Avery, J.; Darzi, A.; Mylonas, G. Open Loop Position Control of Soft Hydraulic Actuators for Minimally Invasive Surgery. Appl. Sci. 2021, 11, 7391. [Google Scholar] [CrossRef]
- Garcia, L.; Kerns, G.; O’Reilley, K.; Okesanjo, O.; Lozano, J.; Narendran, J.; Broeking, C.; Ma, X.; Thompson, H.; Njeuha, P.N.; et al. The Role of Soft Robotic Micromachines in the Future of Medical Devices and Personalized Medicine. Micromachines 2021, 13, 28. [Google Scholar] [CrossRef] [PubMed]
- Su, H.; Qi, W.; Chen, J.; Zhang, D. Fuzzy Approximation-based Task-Space Control of Robot Manipulators With Remote Center of Motion Constraint. IEEE Trans. Fuzzy Syst. 2022. [Google Scholar] [CrossRef]
- Qi, W.; Su, H. A Cybertwin based Multimodal Network for ECG Patterns Monitoring using Deep Learning. IEEE Trans. Ind. Inform. 2022. [Google Scholar] [CrossRef]
- Decroly, G.; Lambert, P.; Delchambre, A. A Soft Pneumatic Two-Degree-of-Freedom Actuator for Endoscopy. Front. Robot. AI 2021, 8, 768236. [Google Scholar] [CrossRef]
- Trumić, M.; Jovanović, K.; Fagiolini, A. Decoupled nonlinear adaptive control of position and stiffness for pneumatic soft robots. Int. J. Robot. Res. 2020, 40, 277–295. [Google Scholar] [CrossRef]
- Schmitt, F.; Piccin, O.; Barbé, L.; Bayle, B. Soft Robots Manufacturing: A Review. Front. Robot. AI 2018, 31, 84. [Google Scholar] [CrossRef] [Green Version]
- Chen, F.; Wang, M.Y. Design Optimization of Soft Robots: A Review of the State of the Art. IEEE Robot. Autom. Mag. 2020, 27, 27–43. [Google Scholar] [CrossRef]
- Shih, B.; Shah, D.; Li, J.; Thuruthel, T.G.; Park, Y.L.; Iida, F.; Bao, Z.; Kramer-Bottiglio, R.; Tolley, M.T. Electronic skins and machine learning for intelligent soft robots. Sci. Robot. 2020, 5, 41. [Google Scholar] [CrossRef] [PubMed]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, H.; Hou, X.; Zhang, X.; Qi, W.; Cai, S.; Xiong, X.; Guo, J. Pneumatic Soft Robots: Challenges and Benefits. Actuators 2022, 11, 92. https://doi.org/10.3390/act11030092
Su H, Hou X, Zhang X, Qi W, Cai S, Xiong X, Guo J. Pneumatic Soft Robots: Challenges and Benefits. Actuators. 2022; 11(3):92. https://doi.org/10.3390/act11030092
Chicago/Turabian StyleSu, Hang, Xu Hou, Xin Zhang, Wen Qi, Shuting Cai, Xiaoming Xiong, and Jing Guo. 2022. "Pneumatic Soft Robots: Challenges and Benefits" Actuators 11, no. 3: 92. https://doi.org/10.3390/act11030092
APA StyleSu, H., Hou, X., Zhang, X., Qi, W., Cai, S., Xiong, X., & Guo, J. (2022). Pneumatic Soft Robots: Challenges and Benefits. Actuators, 11(3), 92. https://doi.org/10.3390/act11030092