
Communication-Based Train Control with Dynamic Headway Based on Trajectory Prediction


Abstract
:1. Introduction
- (1)
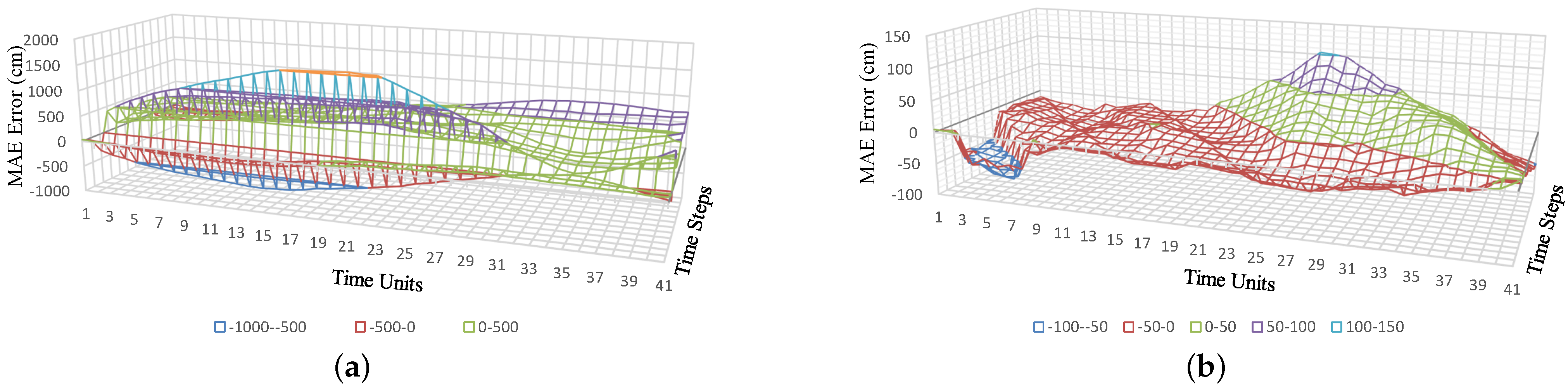
- The trajectory prediction part can accurately predict the leading train’s trajectory over the following one’s emergency braking time.
- (2)
- A dynamic headway policy based on vehicle-to-vehicle and vehicle-to-center communications results in much smaller distances than existing ones based on fixed-block and moving-block policies.
- (3)
- A backup switching policy increases gracefully to the new situation without sacrificing security, such as lost communications.
- 1.
- Aiming at the trajectory prediction problem for trains, a data-processing method and a hybrid prediction model which enable an accurate prediction even when the horizons are increased to 15 s is established for the first time.
- 2.
- We used the concept of trajectory prediction and moving block and developed a soft wall control system that substantially reduces the distance between trains
- 3.
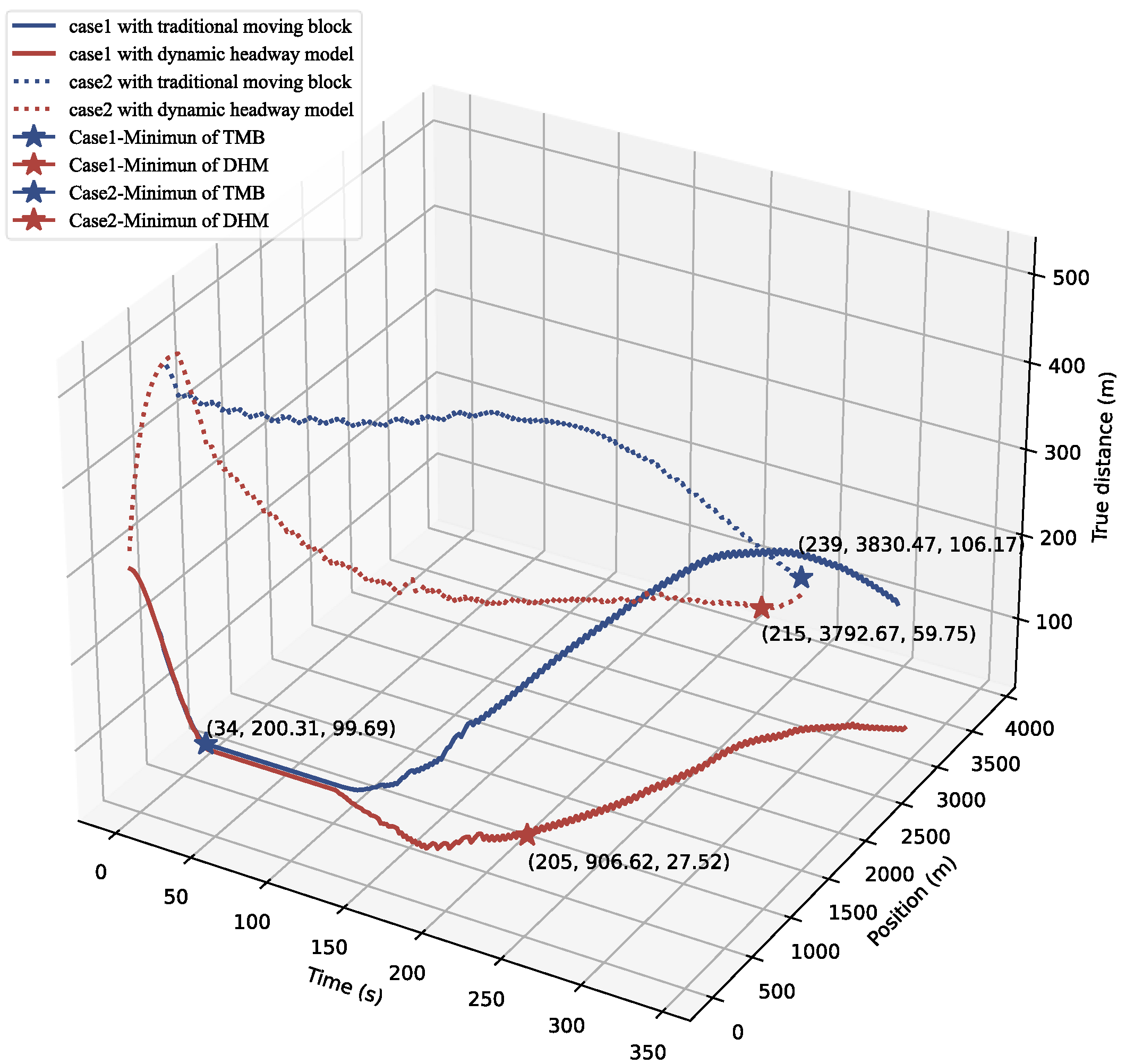
- In contrast to the traditional moving block, our proposed dynamic headway system shows reductions in train headway of at least 64%.
2. Related Work
2.1. Dynamic Headway Policy and Optimization Methods
2.2. Trajectory Prediction
3. Train Dynamic Headway Policy
3.1. Trajectory Prediction of Leading Train
3.2. Dynamic Headway Model
| Algorithm 1 Dynamic Headway model. |
Input: observed trajectory data of trains: , where M is the historical time steps. Output: The headway .
|
4. Experiment and Discussions
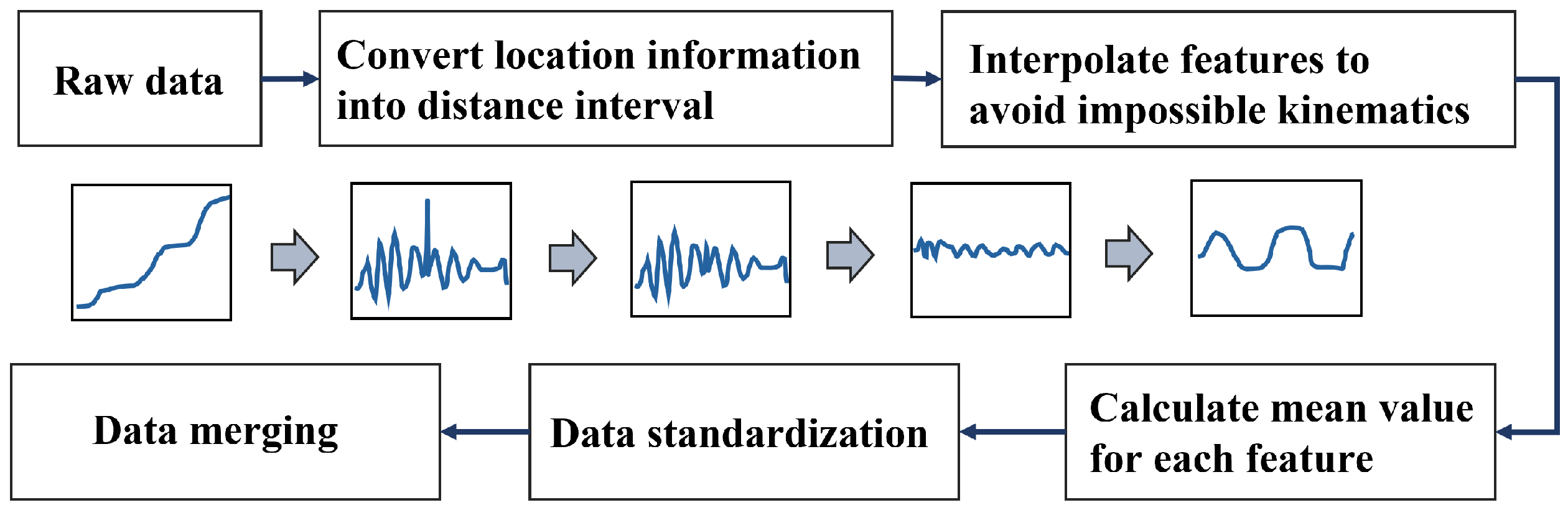
4.1. Data Processing
4.2. Comparative Analysis of Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Quaglietta, E.; Wang, M.; Goverde, R. A multi-state train-following model for the analysis of virtual coupling railway operations. J. Rail Transp. Plan. Manag. 2020, 15, 100195. [Google Scholar] [CrossRef]
- Zhao, Y.; Ioannou, P. Positive Train Control with Dynamic Headway Based on an Active Communication System. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3095–3103. [Google Scholar] [CrossRef]
- Niu, H.; Zhou, X.; Gao, R. Train scheduling for minimizing passenger waiting time with time-dependent demand and skip-stop patterns: Nonlinear integer programming models with linear constraints. Transp. Res. Part B 2015, 76, 117–135. [Google Scholar] [CrossRef]
- Khoshniyat, F.; Peterson, A. Improving train service reliability by applying an effective timetable robustness strategy. J. Intell. Transp. Syst. 2017, 21, 525–543. [Google Scholar] [CrossRef]
- Xun, J.; Li, K.P.; Cao, Y. An Optimization Approach for Real-Time Headway Control of Railway Traffic. IEICE Trans. Inf. Syst. 2015, E98D, 140–147. [Google Scholar] [CrossRef]
- Yang, X.; Li, X.; Ning, B.; Tang, T. An optimisation method for train scheduling with minimum energy consumption and travel time in metro rail systems. Transp. B 2015, 3, 79–98. [Google Scholar] [CrossRef]
- Li, S.; Schutter, B.D.; Yang, L.; Gao, Z. Robust Model Predictive Control for Train Regulation in Underground Railway Transportation. IEEE Trans. Control Syst. Technol. 2016, 24, 1075–1083. [Google Scholar] [CrossRef]
- Sanchez-Martinez, G.E.; Koutsopoulos, H.N.; Wilson, N. Real-time holding control for high-frequency transit with dynamics. Transp. Res. Part B Methodol. 2016, 83, 1–19. [Google Scholar] [CrossRef]
- Dong, H.; Gao, S.; Ning, B. Cooperative Control Synthesis and Stability Analysis of Multiple Trains Under Moving Signaling Systems. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2730–2738. [Google Scholar] [CrossRef]
- Li, S.; Yang, L.; Gao, Z. Adaptive coordinated control of multiple high-speed trains with input saturation. Nonlinear Dyn. 2016, 3, 2157–2169. [Google Scholar] [CrossRef]
- Li, S.; Yang, L.; Gao, Z. Coordinated cruise control for high-speed train movements based on a multi-agent model. Transp. Res. Part C 2015, 56, 281–292. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, T.; Karimi, H.R. Distributed cruise control of high-speed trains. J. Frankl. Inst. 2017, 354, 6044–6061. [Google Scholar] [CrossRef]
- Ye, H.; Liu, R. A multiphase optimal control method for multi-train control and scheduling on railway lines. Transp. Res. Part B Methodol. 2016, 93, 377–393. [Google Scholar] [CrossRef]
- Ye, H.; Liu, R. Nonlinear programming methods based on closed-form expressions for optimal train control. Transp. Res. Part C Emerg. Technol. 2017, 82, 102–123. [Google Scholar] [CrossRef]
- Shi, F.; Zhao, S.; Zhou, Z.; Wang, P.; Bell, M. Optimizing train operational plan in an urban rail corridor based on the maximum headway function. Transp. Res. Part C Emerg. Technol. 2017, 74, 51–80. [Google Scholar] [CrossRef]
- Le, Z.; Li, K.; Ye, J.; Xu, X. Optimizing the train timetable for a subway system. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit. 2015, 229, 852–862. [Google Scholar] [CrossRef]
- Zhou, Y.; Bai, Y.; Li, J.; Mao, B.; Li, T. Integrated Optimization on Train Control and Timetable to Minimize Net Energy Consumption of Metro Lines. J. Adv. Transp. 2018, 2018, 7905820. [Google Scholar] [CrossRef]
- Sangphong, O.; Siridhara, S.; Ratanavaraha, V. Determining Critical Rail Line Blocks and Minimum Train Headways for Equal and Unequal Block Lengths and Various Train Speed Scenarios. Eng. J. 2017, 21, 281–293. [Google Scholar] [CrossRef]
- Zhang, J.; Han, B. Research on the optimization of train headway for the high-speed railway network. In Proceedings of the ICSSSM11, Tianjin, China, 25–27 June 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Li, X.; Zhang, B.; Liu, Y. A little bit flexibility on headway distribution is enough: Data-driven optimization of subway regenerative energy. Inf. Sci. 2021, 554, 276–296. [Google Scholar] [CrossRef]
- Kong, J.; Yang, C.; Wang, J.; Wang, X.; Zuo, M.; Jin, X.; Lin, S. Deep-Stacking Network Approach by Multisource Data Mining for Hazardous Risk Identification in IoT-Based Intelligent Food Management Systems. Comput. Intell. Neurosci. 2021, 2021, 1194565. [Google Scholar] [CrossRef]
- Liu, Q.; Wu, S.; Wang, L.; Tan, T. Predicting the Next Location: A Recurrent Model with Spatial and Temporal Contexts; AAAI Press: Palo Alto, CA, USA, 2016. [Google Scholar]
- Al-Molegi, A.; Jabreel, M.; Ghaleb, B. STF-RNN: Space-Time Features-based Recurrent Neural Network for Predicting People’s Next Location. In Proceedings of the Computational Intelligence, Athens, Greece, 6–9 December 2016. [Google Scholar]
- Kim, B.D.; Kang, C.M.; Lee, S.H.; Chae, H.; Kim, J.; Chung, C.C.; Choi, J.W. Probabilistic Vehicle Trajectory Prediction over Occupancy Grid Map via Recurrent Neural Network; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar]
- Park, S.H.; Kim, B.D.; Kang, C.M.; Chung, C.C.; Choi, J.W. Sequence-to-Sequence Prediction of Vehicle Trajectory via LSTM Encoder-Decoder Architecture; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Berenguer, A.D.; Alioscha-Perez, M.; Oveneke, M.C.; Sahli, H. Context-aware human trajectories prediction via latent variational model. IEEE Trans. Circuits. Syst. Video Technol. 2020, 31, 1876–1889. [Google Scholar] [CrossRef]
- Gao, C. Long Short-Term Memory Neural Network Applied to Train Dynamic Model and Speed Prediction. Algorithms 2019, 12, 173. [Google Scholar]
- Gupta, A.; Johnson, J.; Li, F.F.; Savarese, S.; Alahi, A. Social GAN: Socially Acceptable Trajectories with Generative Adversarial Networks. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Jin, X.B.; Gong, W.T.; Kong, J.L.; Bai, Y.T.; Su, T.L. PFVAE: A Planar Flow-Based Variational Auto-Encoder Prediction Model for Time Series Data. Mathematics 2022, 10, 610. [Google Scholar] [CrossRef]
- Chen, D.; Yan, X.; Liu, X.; Li, S.; Tian, X. A Multiscale-Grid-Based Stacked Bidirectional GRU Neural Network Model for Predicting Traffic Speeds of Urban Expressways. IEEE Access 2020, 9, 1321–1337. [Google Scholar] [CrossRef]
- Zhao, T.; Xu, Y.; Monfort, M.; Choi, W.; Baker, C.; Zhao, Y.; Wang, Y.; Wu, Y.N. Multi-Agent Tensor Fusion for Contextual Trajectory Prediction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar]
- Deo, N.; Trivedi, M.M. Convolutional Social Pooling for Vehicle Trajectory Prediction. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- He, Y.; Lv, J.; Zhang, D.; Chai, M.; Liu, H.; Dong, H.; Tang, T. Trajectory Prediction of Urban Rail Transit Based on Long Short-Term Memory Network. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 3945–3950. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error | Maxmum (cm) | Minimum (cm) | Mean Error (cm) |
|---|---|---|---|
| 75 steps—15 s | 1718 | −682.12 | 51.00 |
| 15 steps—15 s | 165.31 | −150.83 | 9.38 |
| Indicators | RMSE | MAE | MAPE | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Model | RNN | GRU | LSTM | LSTM-KF | RNN | GRU | LSTM | LSTM-KF | RNN | GRU | LSTM | LSTM-KF |
| 1 | 26.5 | 22.2 | 34.5 | 24.3 | 16.0 | 16.8 | 28.0 | 19.9 | 1.9 | 2.0 | 3.4 | 2.4 |
| 2 | 27.5 | 16.2 | 23.7 | 25.3 | 21.8 | 13.7 | 18.0 | 19.9 | 2.7 | 1.7 | 2.2 | 2.4 |
| 3 | 27.1 | 19.4 | 27.0 | 27.2 | 23.6 | 17.4 | 21.0 | 21.2 | 2.9 | 2.1 | 2.6 | 2.6 |
| 4 | 41.0 | 23.6 | 29.8 | 29.8 | 35.6 | 21.2 | 25.2 | 24.2 | 4.3 | 2.6 | 3.1 | 3.0 |
| 5 | 50.4 | 29.7 | 37.0 | 35.1 | 44.1 | 27.2 | 32.0 | 29.4 | 5.4 | 3.3 | 3.9 | 3.6 |
| 6 | 55.0 | 33.6 | 34.5 | 37.4 | 43.3 | 30.6 | 29.2 | 31.7 | 5.3 | 3.7 | 3.6 | 3.9 |
| 7 | 62.8 | 40.0 | 36.7 | 40.0 | 54.4 | 34.5 | 30.8 | 34.0 | 6.6 | 4.2 | 3.8 | 4.2 |
| 8 | 72.8 | 51.9 | 44.6 | 44.9 | 59.0 | 47.3 | 37.7 | 38.2 | 7.2 | 5.8 | 4.6 | 4.7 |
| 9 | 83.1 | 59.7 | 49.8 | 50.1 | 65.0 | 54.6 | 41.3 | 42.0 | 7.9 | 6.7 | 5.0 | 5.1 |
| 10 | 93.2 | 66.5 | 57.3 | 56.3 | 76.2 | 59.4 | 47.8 | 47.0 | 9.3 | 7.2 | 5.8 | 5.7 |
| 11 | 101.6 | 73.5 | 67.3 | 63.7 | 82.6 | 64.8 | 57.5 | 53.6 | 10.1 | 7.9 | 7.0 | 6.5 |
| 12 | 112.0 | 83.9 | 67.0 | 69.2 | 92.1 | 73.3 | 55.0 | 57.9 | 11.2 | 8.9 | 6.7 | 7.1 |
| 13 | 119.4 | 89.0 | 76.6 | 75.8 | 95.7 | 77.1 | 64.1 | 63.3 | 11.7 | 9.4 | 7.8 | 7.7 |
| 14 | 122.1 | 99.5 | 80.4 | 81.8 | 100.3 | 86.8 | 66.4 | 68.1 | 12.2 | 10.6 | 8.1 | 8.3 |
| 15 | 137.6 | 106.0 | 95.2 | 89.7 | 112.9 | 90.7 | 80.8 | 74.7 | 13.8 | 11.1 | 9.9 | 9.1 |
| Case | Case 1 | Case 2 | ||
|---|---|---|---|---|
| Performance Indicator | Traditional Moving Block | Dynamic Headway | Traditional Moving Block | Dynamic Headway |
| Track distance (m) | 184.64 | 74.66 | 319.22 | 113.85 |
| Min Track distance (m) | 99.69 | 27.52 | 106.17 | 59.75 |
| Mean Headway (m) | 146.15 | 149.99 | 220.34 | 221.18 |
| Max Headway (m) | 300.00 | 306.53 | 415.49 | 696.43 |
| Min Headway (m) | 99.68 | 98.48 | 102.20 | 78.60 |
| Mean Velocity (m/s) | 6.16 | 6.66 | 11.84 | 10.51 |
| Max Velocity (m/s) | 12.99 | 13.19 | 17.79 | 21.93 |
| Min Velocity (m/s) | 0.00 | 0.00 | 1.00 | 1.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Y.; Lv, J.; Tang, T. Communication-Based Train Control with Dynamic Headway Based on Trajectory Prediction. Actuators 2022, 11, 237. https://doi.org/10.3390/act11080237
He Y, Lv J, Tang T. Communication-Based Train Control with Dynamic Headway Based on Trajectory Prediction. Actuators. 2022; 11(8):237. https://doi.org/10.3390/act11080237
Chicago/Turabian StyleHe, Yijuan, Jidong Lv, and Tao Tang. 2022. "Communication-Based Train Control with Dynamic Headway Based on Trajectory Prediction" Actuators 11, no. 8: 237. https://doi.org/10.3390/act11080237
APA StyleHe, Y., Lv, J., & Tang, T. (2022). Communication-Based Train Control with Dynamic Headway Based on Trajectory Prediction. Actuators, 11(8), 237. https://doi.org/10.3390/act11080237