
Highly Sensitive Inertial Micro-Switch for Achieving Adjustable Multi-Threshold Acceleration

Abstract
:1. Introduction
2. Modeling and Design
2.1. Mathematical Model and Structural Design
2.2. Simulation and Inertial Stress
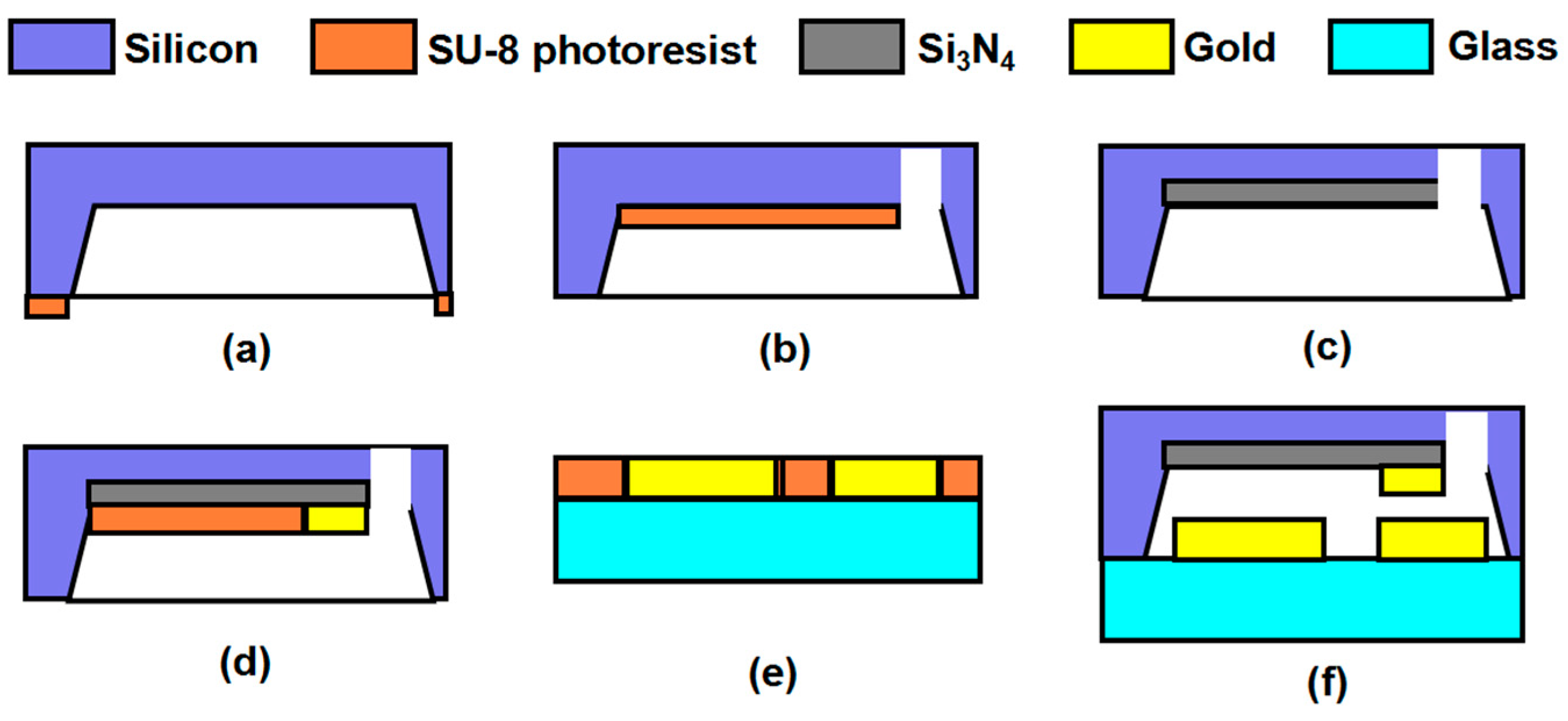
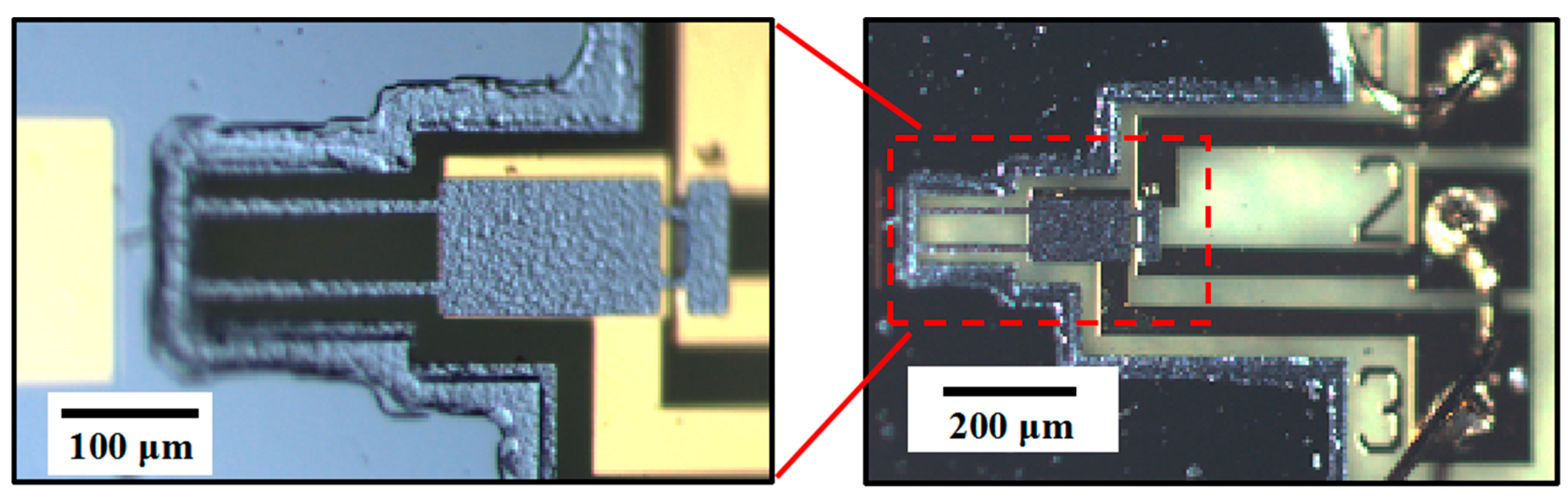
3. Micro-Fabrication of Inertial Micro-Switch
4. Testing and Discussion
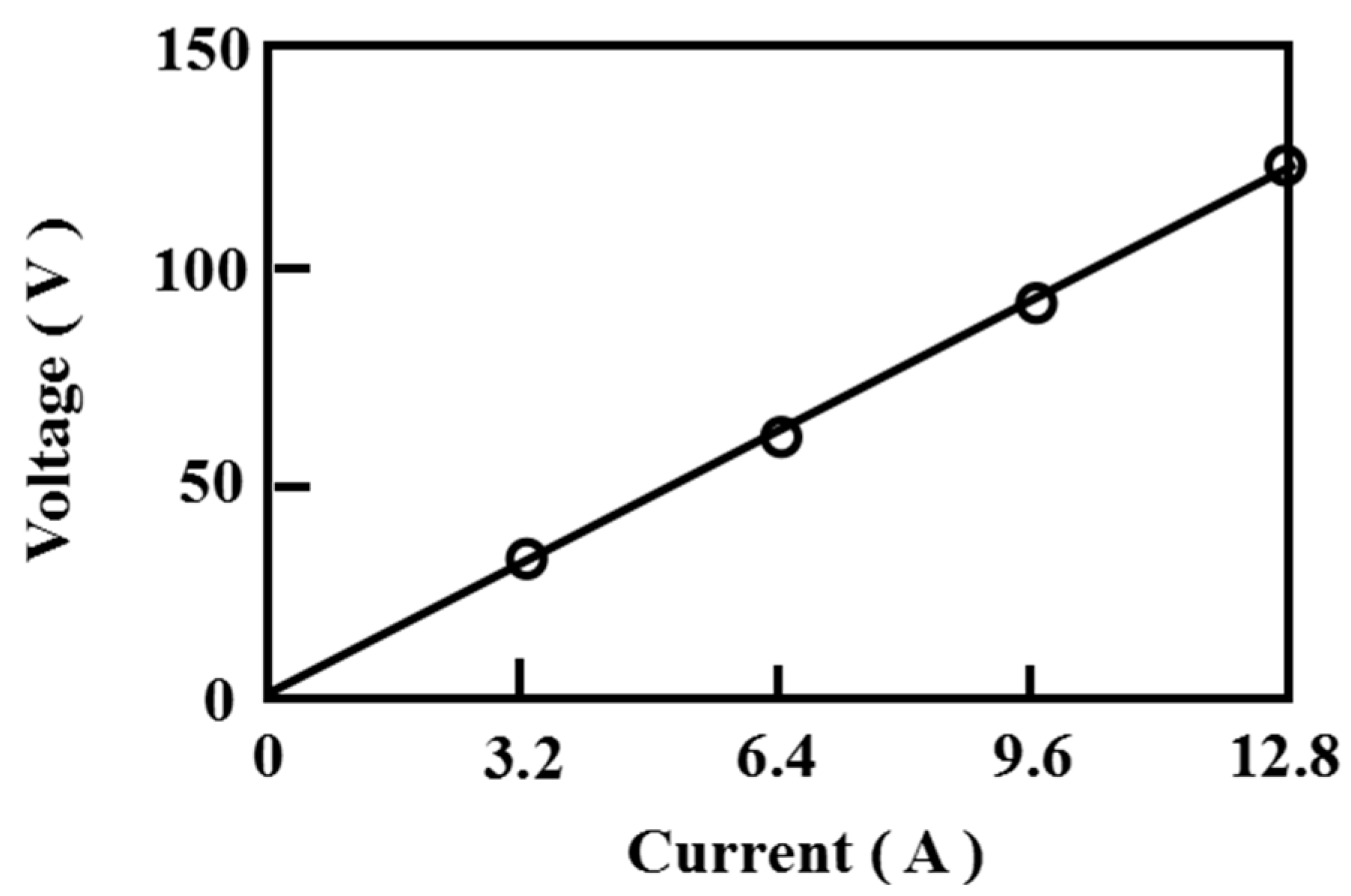
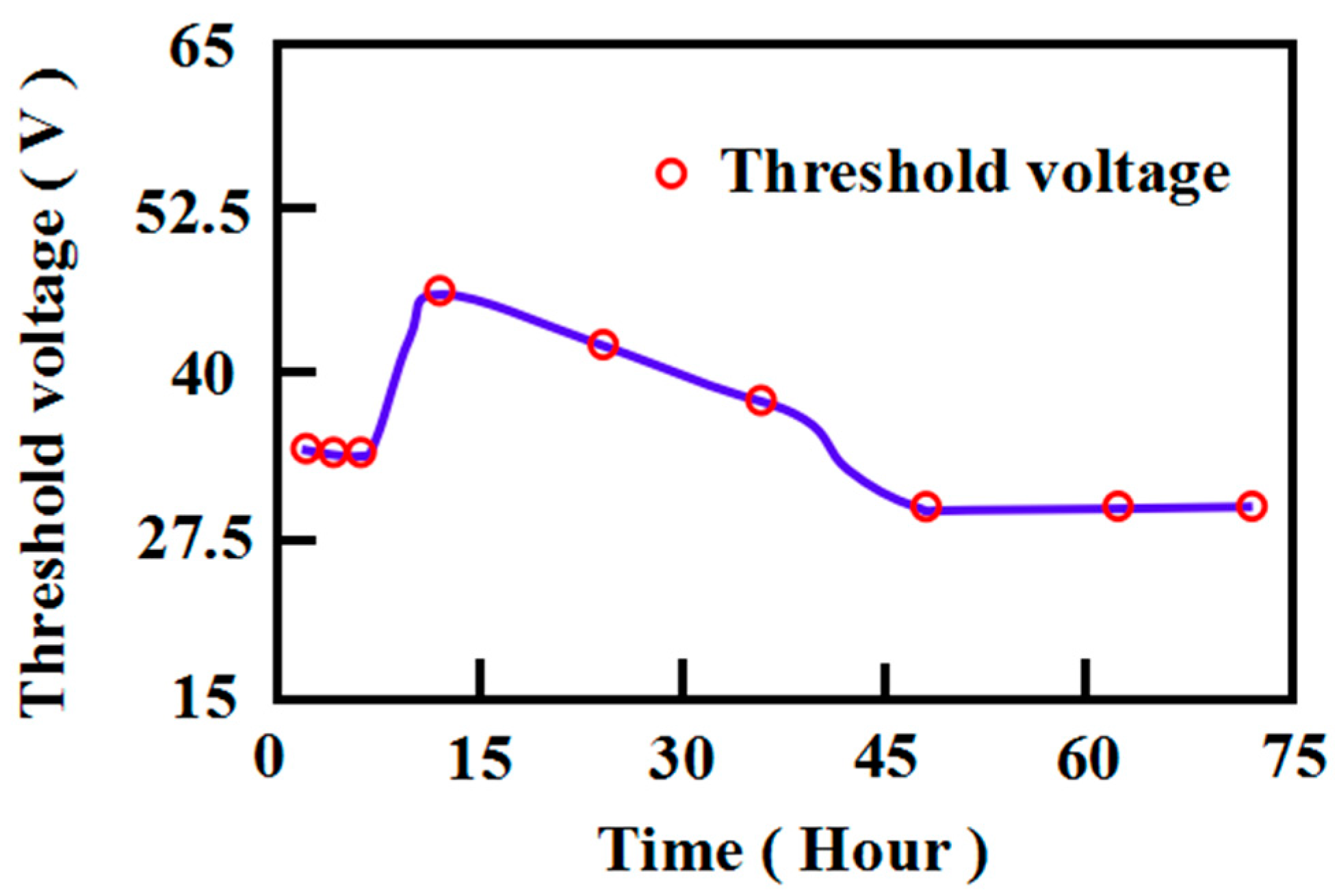
4.1. Threshold Voltage of Inertial Micro-Switch
4.2. Multi-Threshold Acceleration of Inertial Micro-Switch
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ren, C.; Wang, K.; Zhang, P.; Li, Y.; Zhao, Z.; Shi, X.; Yang, Z. A Self-Powered MEMS Inertial Switch for Potential Zero Power-Consumption Wake-Up Application. J. Microelectromech. Syst. 2021, 30, 550–559. [Google Scholar] [CrossRef]
- Lee, I.J.; Song, Y.; Jung, H.; Choi, J.; Eun, Y. Deformable carbon nanotube-contact pads for inertial microswitch to extend contact time. IEEE Trans. Ind. Electron. 2011, 59, 4914–4920. [Google Scholar] [CrossRef]
- Currano, L.J.; Becker, C.; Smith, G.; Isaacson, B.; Morris, C.J. 3-axis acceleration switch for traumatic brain injury early warning. In Proceedings of the 2012 IEEE 25th International Conference on Micro Electro Mechanical Systems (MEMS), Paris, France, 29 January–2 February 2012; pp. 484–487. [Google Scholar]
- Xu, Q.; Yang, Z.; Sun, Y.; Lai, L.; Jin, Z.; Ding, G.; Zhao, X.; Yao, J.; Wang, J. Shock-resistibility of mems-based inertial microswitch under reverse directional ultra-high g acceleration for IoT applications. Sci. Rep. 2017, 7, 45512. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cao, Y.; Xi, Z.; Yu, P.; Wang, J.; Nie, W. Optical measurement of the dynamic contact process of a MEMS inertial switch under high shock loads. IEEE Trans. Ind. Electron. 2016, 64, 701–709. [Google Scholar] [CrossRef]
- Liu, M.; Zhu, Y.; Wang, C.; Chen, Y.; Wu, Y.; Zhang, H.; Wang, W. A novel low-g MEMS bistable inertial switch with self-locking and reverse-unlocking functions. J. Microelectromech. Syst. 2020, 29, 1493–1503. [Google Scholar] [CrossRef]
- Michaelis, S.; Timme, H.; Wycisk, M.; Binder, J. Additive electroplating technology as a post-CMOS process for the production of MEMS acceleration-threshold switches for transportation applications. J. Micromech. Microeng. 2000, 10, 120–123. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, J.; Wang, W.; Zhao, W.; Zhao, W.; Zhu, H. A low-g MEMS inertial switch with a novel radial electrode for uniform omnidirectional sensitivity. Sens. Actuators A Phys. 2018, 270, 214–222. [Google Scholar]
- Zhang, X.; Xiang, X.; Wang, Y.; Ding, G.; Xu, X.; Yang, Z. A Heterogeneous Integrated MEMS Inertial Switch with Compliant Cantilevers Fixed Electrode and Electrostatic Locking to Realize Stable On-State. J. Microelectromech. Syst. 2019, 28, 977–986. [Google Scholar] [CrossRef]
- Ouakad, H.; Younis, M.; Alsaleem, F. Dynamic response of an electrostatically actuated microbeam to drop-table test. J. Micromech. Microeng. 2012, 22, 095003. [Google Scholar] [CrossRef]
- Zhang, P.; Li, Y.; Ren, C.; Zhang, H.; Shi, X.; Liu, Y.; Yang, Z. A MEMS Inertial Switch With Large Scale Bi-Directional Adjustable Threshold Function. J. Microelectromech Syst. 2021, 31, 124–133. [Google Scholar] [CrossRef]
- Xu, Q.; Khan, F.; Younis, M.I. Multi-Threshold Inertial Switch for Quantitative Acceleration Measurements. IEEE Sens. J. 2021, 21, 23849–23859. [Google Scholar] [CrossRef]
- Cai, H.G.; Yang, Z.; Ding, G.; Wang, H. Development of a novel MEMS inertial switch with a compliant stationary electrode. IEEE Sensors J. 2009, 9, 801–808. [Google Scholar] [CrossRef]
- Xu, Q.; Wang, L.; Younis, M.I. Multi-threshold Inertial Switch with Acceleration Direction Detection Capability. IEEE Trans. Ind. Electron. 2022, 70, 4226–4235. [Google Scholar] [CrossRef]
- Xi, Z.; Kong, N.; Nie, W.; Cao, Y.; Zheng, C. High g MEMS inertial switch capable of direction detection. Sens. Actuators A Phys. 2019, 296, 7–16. [Google Scholar] [CrossRef]
- Post, A.; Hoshizaki, T.; Gilchrist, M.; Brien, S.; Cusimano, M.; Marshall, S. Traumatic brain injuries: The influence of the direction of impact. Neurosurgery 2015, 76, 81–91. [Google Scholar] [CrossRef] [PubMed]
- Currano, L.J.; Becker, C.; Lunking, D.; Smith, G.; Isaacson, B.; Thomas, L. Triaxial inertial switch with multiple thresholds and resistive ladder readout. Sens. Actuators A Phys. 2013, 195, 191–197. [Google Scholar] [CrossRef]
- Ongkodjojo, A.; Tay, F. Optimized design of a micromachined G-switch based on contactless configuration for health care applications. J. Phys Conf. 2006, 34, 1044–1052. [Google Scholar] [CrossRef]
- Yu, J.; Wen, Y.; Yang, L.; Zhao, Z.; Guo, Y.; Guo, X. Monitoring on triboelectric nanogenerator and deep learning method. Nano Energy 2022, 92, 106698. [Google Scholar] [CrossRef]
- Chen, W.; Wang, Y.; Ding, G.; Wang, H.; Zhao, X.; Yang, Z. Simulation, fabrication and characterization of an all-metal contact-enhanced triaxial inertial microswitch with low axial disturbance. Sens. Actuator A Phys. 2014, 220, 194–203. [Google Scholar] [CrossRef]
- Xu, Q.; Yang, Z.; Fu, B.; Li, J.; Wu, H.; Zhang, Q.; Sun, Y.; Ding, G.; Zhao, X. A surface-micromachining-based inertial micro-switch with compliant cantilever beam as movable electrode for enduring high shock and prolonging contact time. Appl. Surf. Sci. 2016, 387, 569–580. [Google Scholar] [CrossRef]
- Reddy, R.; Komeda, K.; Okamoto, Y.; Lebrasseur, E.; Higo, A.; Mita, Y. A zero-power sensing MEMS shock sensor with a latch-reset mechanism for multi-threshold events monitoring. Sens. Actuators A Phys. 2019, 295, 1–10. [Google Scholar] [CrossRef]
- Wang, Y.; Feng, Q.; Wang, Y.; Chen, W.; Wang, Z.; Ding, G.; Zhao, X. The design, simulation and fabrication of a novel horizontal sensitive inertial micro-switch with low g value based on MEMS micromachining technology. J. Micromech. Microeng. 2013, 23, 105013. [Google Scholar] [CrossRef]
- Deng, J.; Liu, C.; Hao, Y.; Liu, S.; Meng, F.; Xu, P. Control method of pull-in voltage on the MEMS inertial switch integrating actuator and sensor. Microsyst. Technol. 2017, 23, 4785–4795. [Google Scholar] [CrossRef]
- Jaibir, S.; Nagendra, K.; Amitava, D. Fabrication of low pull-in voltage RF MEMS switches on glass substrate in recessed CPW configuration for V-band application. J Micromech Microeng. 2012, 22, 025001. [Google Scholar] [CrossRef]
- Persano, A.; Quaranta, F.; Martucci, M.; Siciliano, P.; Cola, A. On the electrostatic actuation of capacitive RF MEMS switches on GaAs substrte. Sens. Actuators A Phys. 2015, 232, 202–207. [Google Scholar] [CrossRef]
- Duffy, S.; Bozler, C.; Rabe, S.; Knecht, J.; Travis, L.; Wyatt, P.; Keast, C.; Gouker, M. MEMS microswitches for reconfigurable microwave circuitry. IEEE Microw. Wirel. Comp Lett. 2001, 11, 106–108. [Google Scholar] [CrossRef]
- Rebeiz, G. RF MEMS, Theory, Design, and Technology; John Wiley & Sons, Inc.: New York, NY, USA, 2003. [Google Scholar]
- Granaldi, A.; Decuzzi, P. The dynamic response of resistive microswitches: Switching time and bouncing. J. Micro Mech. Micro Eng. 2006, 16, 1108–1115. [Google Scholar] [CrossRef]
- Sen, P.; Kim, C.-J. Microscale liquid-metal switches—A review. IEEE Trans. Ind. Electron. 2009, 56, 1314–1330. [Google Scholar] [CrossRef]
- Niyazi, A.; Xu, Q.; Khan, F.; Younis, M.I. Design, modeling, and testing of a bidirectional multi-threshold MEMS inertial switch. Sens. Actuators A Phys. 2022, 334, 113219. [Google Scholar] [CrossRef]
- Yang, Z.; Ding, G.; Cai, H.; Zhao, X. A MEMS inertia switch with bridge-type elastic fixed electrode for long duration contact. IEEE Trans. Electron Devices 2022, 55, 2492–2497. [Google Scholar] [CrossRef]
- Zhu, H.; Cao, Y.; Xi, Z.; Nie, W. A novel inertial microswitch with dynamic acceleration band-pass characteristics. IEEE Electron Device Lett. 2021, 42, 1049–1052. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Material | Geometric Parameter | Value (μm) |
|---|---|---|---|
| Movable electrode | Si | a | 180 |
| b | 160 | ||
| c | 20 | ||
| d | 30 | ||
| h | 6 | ||
| g0 | 3.5 | ||
| x1 | 80 | ||
| x2 | 60 | ||
| x3 | 100 | ||
| x4 | 60 | ||
| x5 | 40 | ||
| x6 | 100 | ||
| Dielectric layer | Si3N4 | Thickness | 0.15 |
| Upper contact electrode | Gold | Thickness | 0.25 |
| Drive electrode | Gold | Thickness | 0.5 |
| Bottom contact electrode | Gold | Thickness | 0.5 |
| x7 | 60 |
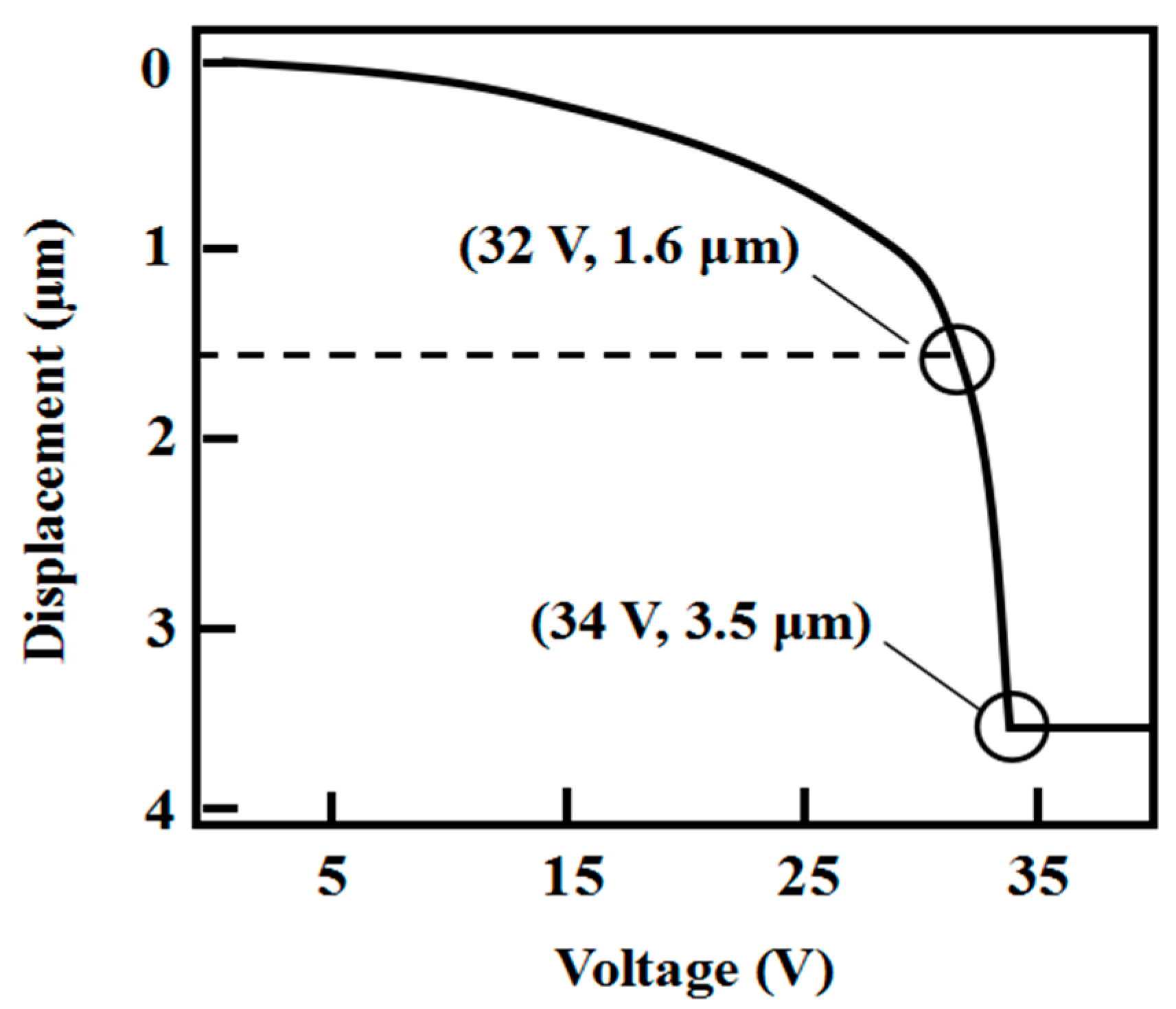
| Parameter | Corresponding Value | Corresponding Displacement |
|---|---|---|
| Pull-in voltage in Equation (3) | 32.29 V | 1.17 µm |
| Pull-in voltage in simulation | 32 V | 1.60 µm |
| Relative error | +0.91% | −26.88% |
| Threshold voltage in Equation (4) | 29.67 V | 1.75 µm |
| Relative error | −8.83% | +33.14% |
| Parameter | Measurement | Design |
|---|---|---|
| Threshold voltage | 31.31 V | 29.67 V |
| Relative error | +4.37% | −1.1% |
| Pull-in voltage | 34.085 V | 32.29 V |
| Relative error | +13.6% | +7.63% |
| Structure Parameter | a | b | x1 | x2 | x3 | h | g0 |
|---|---|---|---|---|---|---|---|
| Design value | 180 µm | 160 µm | 80 µm | 60 µm | 100 µm | 6 µm | 3.5 µm |
| Measure value | 180.2 µm | 160.68 µm | 72 µm | 49.38 µm | 104.3 µm | 6.896 µm | 3.084 µm |
| Change | ↑ 0.2 µm | ↑ 0.68 µm | ↓ 8 µm | ↓ 10.62 µm | ↑ 4.3 µm | ↑ 0.896 µm | ↓ 0.416 µm |
| Threshold voltage | 29.63 V | 29.54 V | 26.55 V | 36.64 V | 29.05 V | 36.54 V | 24.53 V |
| Relative error | −0.13% | −0.44% | −10.52% | 23.49% | −2.09% | 23.15% | −17.32% |
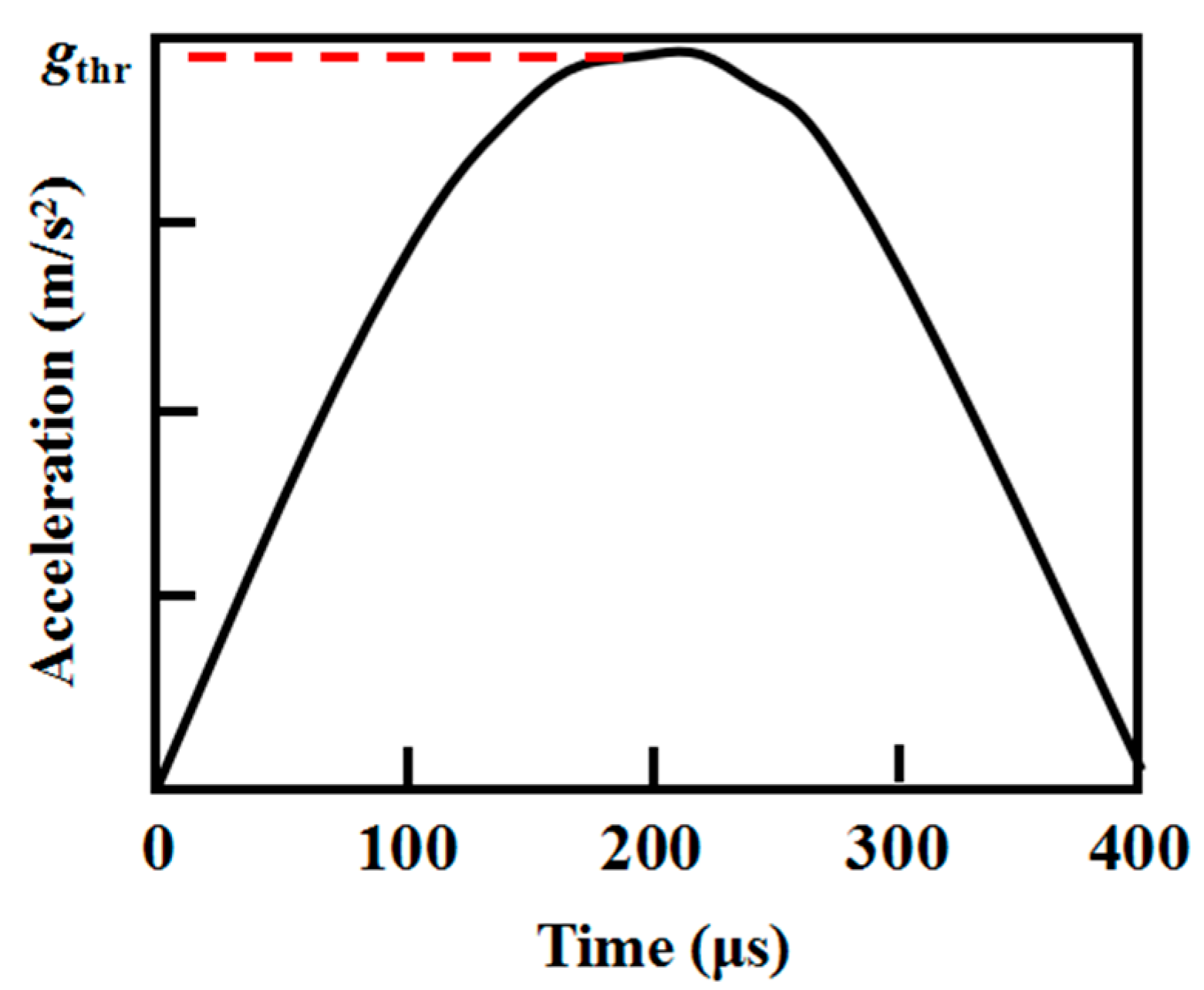
| Parameter | Applied Voltage (V) | gthr (m/s2) | Loading Time (ms) |
|---|---|---|---|
| Simulation | 33 | 4900 | 0.4 |
| Experiment | 25 | 5228.7 | 1.82 |
| Relative error | −24.24% | +6.71% | +355% |
| Micro Switch Structure | Characteristic Dimensions: Length × Width × Thickness (µm) | Materials of Movable Electrode and Dielectric Layer | Stiffness Coefficient (N/m) | Threshold Voltage (V) | Power (N·µm) | Recovery and Repeatability of Coupling Behaviors (Time/Number) |
|---|---|---|---|---|---|---|
 | Movable electrode: 550 × 80 × 6 Drive electrode: 400 × 120 × 0.5 g0 = 4 | Si/SiO2 | 1.48 | 27.9 | 6.286 | 5 min/180 |
 | a = 80, b = 150, c = 10, d = 10, x2 = 65, g0 = 4 | Gold/Si3N4 | 13.72 | 75 | 15.174 | 24 h/60 |
 | a = 180, b = 160, c = 20, d = 30, g0 = 3.5 | Si/Si3N4 | 10.51 | 30 | 1.087 | 1 min/260 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, J.; Song, D.; Su, S. Highly Sensitive Inertial Micro-Switch for Achieving Adjustable Multi-Threshold Acceleration. Actuators 2023, 12, 53. https://doi.org/10.3390/act12020053
Deng J, Song D, Su S. Highly Sensitive Inertial Micro-Switch for Achieving Adjustable Multi-Threshold Acceleration. Actuators. 2023; 12(2):53. https://doi.org/10.3390/act12020053
Chicago/Turabian StyleDeng, Jufeng, Dian Song, and Shijie Su. 2023. "Highly Sensitive Inertial Micro-Switch for Achieving Adjustable Multi-Threshold Acceleration" Actuators 12, no. 2: 53. https://doi.org/10.3390/act12020053
APA StyleDeng, J., Song, D., & Su, S. (2023). Highly Sensitive Inertial Micro-Switch for Achieving Adjustable Multi-Threshold Acceleration. Actuators, 12(2), 53. https://doi.org/10.3390/act12020053