1. Introduction
Dimensional analysis serves to help determine what parameters are important during the experimentation process [
1]. Analytical models and equations provide some context and can provide an overall description of a physical system. However, models do not provide the necessary information to fully test and implement the physics of a system. When considering experimental testing and design, there are often a number of parameters and variables that can be altered or completely neglected. To determine this information experimentally can be difficult and time consuming. Therefore, dimensional analysis can serve as a powerful tool to bridge the gap between mathematical and physics modeling efforts and experimental studies. Dimensional analysis is a great tool for complex physics systems such as fluid dynamics and has just recently been applied to another complex physical system, EAPs [
2,
3]. The work conducted by Olsen et al. shows that dimensional analysis can be a powerful tool for multiphysics systems [
2,
3].
Another emerging complex multiphysics system of note, where dimensional analysis can serve as a powerful analysis tool, is the electrohydraulic (EH) actuator. These actuator systems utilize a complex electro-mechanical-hydraulic activation mechanism to cause actuation. There are many different EH devices; however, for this study, the Hydraulically Amplified Self-Healing Electrostatic (HASEL) actuator will be studied. This actuator was originally developed by the Keplinger Group of the Intelligent System/Max Planck Institute; the mechanism uses hydraulic amplification and the electrostatic “zipping” (gradual closure) of the electrodes to cause an output force and displacement [
4,
5,
6,
7]. The HASEL actuator is an alternative to solid dielectric elastomer actuators (DEAs). This novel actuator has excellent capabilities to be used as artificial muscles and other robotic manipulators [
8,
9]. The hydraulic amplification of the HASEL leads to larger outputs while maintaining its lightweight and flexibility [
5]. Additionally, the use of a liquid dielectric medium helps prevent dielectric breakdown in the actuator, as seen with solid DEAs. However, more information is needed to appropriately use these devices in a meaningful and effective way. Before further explaining the path of study, it is beneficial to provide the background of the HASEL actuator.
The underlying structure of the HASEL actuator is straightforward, in that it comprises three materials: (i) a liquid dielectric, (ii) a compliant polymer film, and (iii) a flexible electrode. First, the polymer film is formed into a shell of a given geometry, and this can be a circular, rectangular, etc. [
4,
5,
6,
7]. Then, a given volume of liquid dielectric material is then injected into the shell. Finally, flexible electrodes are attached to specific locations on the polymer shell (
Figure 1). In general, these electrodes are placed strategically such that the actuator will experience hydraulic amplification where needed. The actuation mechanism is based on current actuator technologies, electrostatic actuation of small systems and hydraulic actuation of pistons and other traditional robotic components. These two actuation mechanisms are interesting in that they work sequentially. The electrostatic actuation mechanism is triggered first with the application of an electric field. When an electric field is applied to the compliant electrode, the electrodes gradually collapse toward each other due to the electronic polarization of the dielectric film and the liquid dielectric [
8,
10,
11]. Electronic polarization is caused by the dipole moment induced by the movement of the molecules’ electrons [
8,
10,
11]. The gradual closure of the electrodes draws the films toward each other and forces the liquid dielectric in the inactive chamber(s) of the actuator. The hydraulic mechanism is simpler, in that the movement of the fluid into the inactive chamber causes an output displacement by proxy of the film shell. The majority of the liquid dielectric is pushed into the inactive chamber. Because of the film shell and the applied pressure from the electrostatic mechanism, pressure is created in the inactive section of the actuator and an output force is generated (
Figure 2).
The HASEL actuator has a fairly straightforward fabrication method and a fairly simple actuation method, on the surface. However, the actuation mechanism is quite complex when considering physics-based modeling. As mentioned previously, there are three major components to modeling that must be considered: (i) the electrical, (ii) the fluid dynamics, and (iii) the mechanical. These different physics systems must be connected to accurately describe the entire system. Thus, more information is needed to appropriately use these devices in a meaningful and effective way. This study will consider the physics and the experimental data to gain further insight on how these actuators function. First, an analytical model will be introduced that describes the zipping of the electrodes. This zipping mechanism is directly related to the displacement of the fluid; thus, the analytical equation will provide a good basis for describing the actuator output. Other studies have considered the dynamics of the HASEL actuator system; however, various constraints and considerations are not included in those analyses [
9,
12]. Rothemund et al. considers the dynamics of EH actuators; however, Poiseuille Flow conditions are used as a simplification to define the boundary conditions of the actuator [
9]. The model developed by Kellaris et al. neglects the contribution of the liquid dielectric and the mechanical properties of the film [
12]. Furthermore, the current literature has not considered using dimensional analysis as a method of relating the experimental output to the analytical models. Equipollent work has considered the introduction of dimensionless quantities into their analysis; however, the formal use of Π groups to relate the various parameters of the system to each other has not been considered [
5,
9,
12]. Lastly, the current research is lacking detail regarding how the materials affect the actuator system as a whole. Some of the research considers different dielectric materials, but no formal in-depth study has focused on these materials individually and their collective behavior in the actuation system [
13,
14,
15,
16]. Thus, there is an overall disconnection between the theory and the experimentation, that can be connected via dimensional analysis.
Considering the current state of the literature, this study aims to further the field of EH actuators and the Peano-HASEL actuator by way of a few objectives. The first objective is to introduce an analytical model for the zipping mechanism of the actuator; this model will act as a basis for the dimensional analysis. The second objective is to apply the Buckingham Pi theorem to the analytical equation to effectively compare and relate the experimental results to the analytical equation. The final objective is to consider in situ experimental results and how each variable parameter affects the system. By considering this path of study, the understanding of HASEL actuators and EH actuators will be fostered theoretically and experimentally. By analyzing these actuators using mathematical analysis and experimental work, HASEL actuators can be used in robotic systems more effectively and open the door to further applications not currently explored.
3. The Dimensional Analysis
Considering the analytical theory developed in
Section 2, the dimensional analysis can now be conducted. Although the proposed equation of motion is quite complex, the Buckingham Pi method of dimensional analysis will be used [
1,
2,
21,
22]. To begin the analysis, we consider all the dimensional parameters involved in the equation.
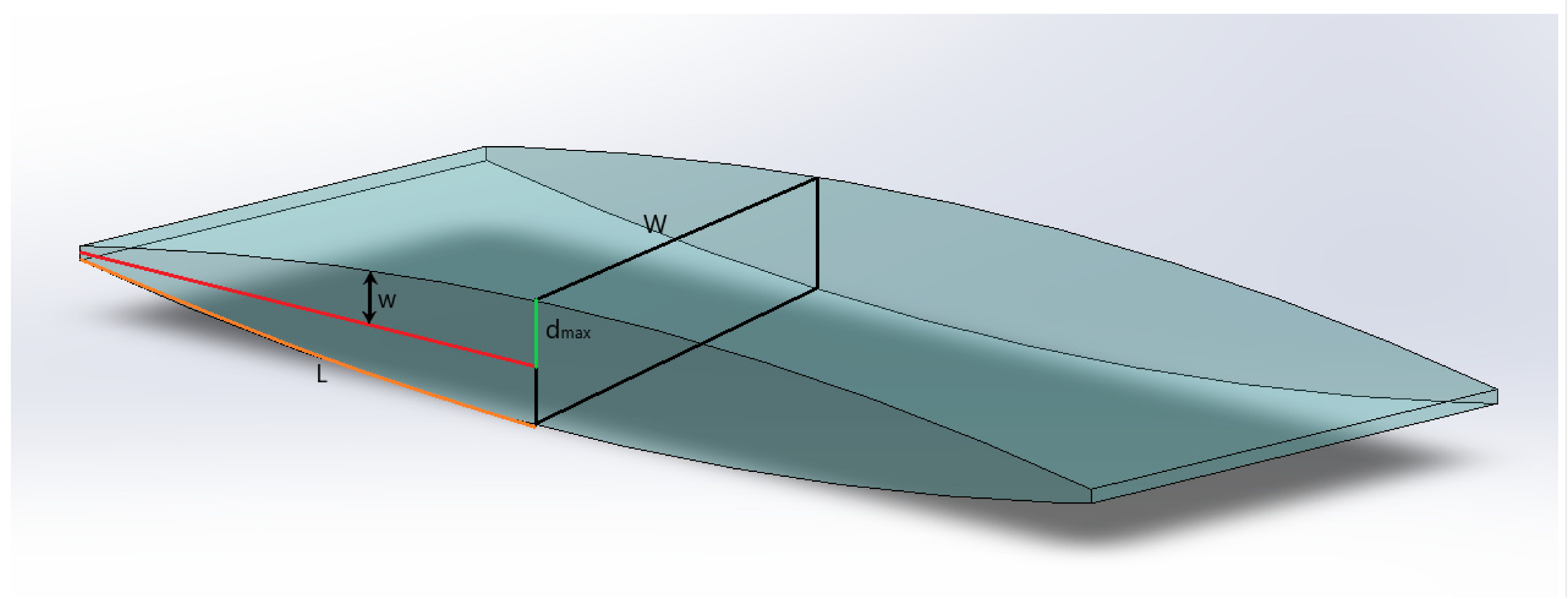
Figure 6 serves as an approximation for the actual actuator system; this system is the three-dimensional version of the analytical setup described in
Section 2. Based on the analytical equation and
Figure 6, it is assumed that the actuator system takes the shape of a rectangular duct. Again, this neglects three-dimensional edge effects. By defining the set as such, a characteristic length can be defined to represent several of the parameters based on the geometry alone. The characteristic length for a rectangular is defined as
The analytical equation is designed to describe the motion of the electrode deflection
; therefore, as the electrodes zip closed, the actuator has a half thickness of
(as seen in
Figure 6). So, the characteristic length will be defined as
Now that a characteristic length has been defined for the system, the rest of the dimensional parameters can be listed.
Table 1 describes all of the dimensional parameters of note in the analytical equation. Additionally, the fundamental dimensions are defined in
Table 1 as well. For this actuator system four fundamental dimensions will be used, mass (M), length (L), time (T), and current (i). The dimensional parameters are also separated by declaring their dependence in the actuation system (
Table 1). For example, the characteristic length is defined as a dependent variable because the deflection of the electrode is based on all of the other dimensional parameters. Based on this initial setup it can be seen that eight Π groups will be obtained. From this point, four dimensional parameters are chosen to be the repeating parameters in the solution. In general, the repeating parameters should be independent and contain all of the primary dimensions [
1,
2,
21,
22]. The repeating parameters should not primarily consist of powers of the fundamental dimensions [
1,
3,
21,
22].
The four repeating parameters chosen are, Young’s modulus (Y), the fluid density (ρ), the fluid viscosity (μ), and the applied voltage (V). As an additional selection criterion specific to this study, the repeating parameters must be parameters that can be easily tested or verified via experimentation. The applied voltage was chosen because it is a direct experimental parameter. It can be varied based on how the experiment is conducted. The viscosity was chosen because it is an experimental parameter that was measured in the laboratory experimentally. Similar to the voltage, this value can be varied based on a parametric study of the liquid dielectric material. The elastic modulus was chosen because it is an experimental parameter that was measured in the laboratory experimentally, as well. Similar to the voltage and dynamic viscosity, this value can be varied based on a parametric study of the film materials. The density was chosen as an additional parameter because it is independent in the system, it can be measured experimentally if needed and it can be varied based on a parametric study of the liquid dielectric materials. All in all, the repeating parameters that were chosen can be changed experimentally and each parameter can act as a control point in the test. In terms of the parameter dependence, all of the selected parameters are independent as well. As mentioned previously, the voltage is the input control for the zipping motion. The elastic modulus is a material property that remains constant and is independent from the rest of the system. The dynamic viscosity and the density of the fluid are also constant properties of the material and are independent of the actual zipping mechanism.
As a side note, the dielectric constant has a * next to it. This is due to its status as an independent and dependent variable. Examining the applied force in Equation (20), it can be seen that this term is dependent because it contains a deflection term. This deflection term is closely tied to the dielectric constant terms for the liquid dielectric and the polymer film. If the rest of the terms are taken out and the focus is on the dielectric constant terms and the thicknesses, the following expression is obtained.
From this expression, a new variable called the permittivity (
) can be obtained. This
is the value dimensional parameter listed in
Table 1. This parameter has the dimensions of
due to the additional length term from the thickness of the film. This expression can further be reduced to the following expression.
This
is the value dimensional parameter listed in
Table 1. From the expression above the following relationship can be made,
, where
is a constant that is a function of position and time. Thus, the
term is defined as
If
acts as a general constant (as a means to observe
), then
can act as an independent variable that can be experimentally tested. Now that the final setup is complete, the
groups are found (
Table 2). The
groups were calculated using MATLAB. Each
group resulted in a system of equations, and a script was created that solve the system. The full derivation is provided in
Appendix A.4. The most important of these newly defined groups is
which is called the Washington–Kim (WK) group. This dimensionless group will be discussed further in
Section 5.
5. Discussion
Table 2 provides the eight Π groups that were determined based on the analytical equation derived in
Section 2 and the Buckingham Pi theorem of dimensional analysis (
Section 3). From these results, there are five groups of immediate interest, these are Π
1, Π
2, Π
3, Π
6, and Π
8. These five Π groups will be discussed in detail.
5.1. Π1 Group: Mass Flow Rate—Fluid Displacement, Viscous, and Viscoelastic Contributions
As mentioned in
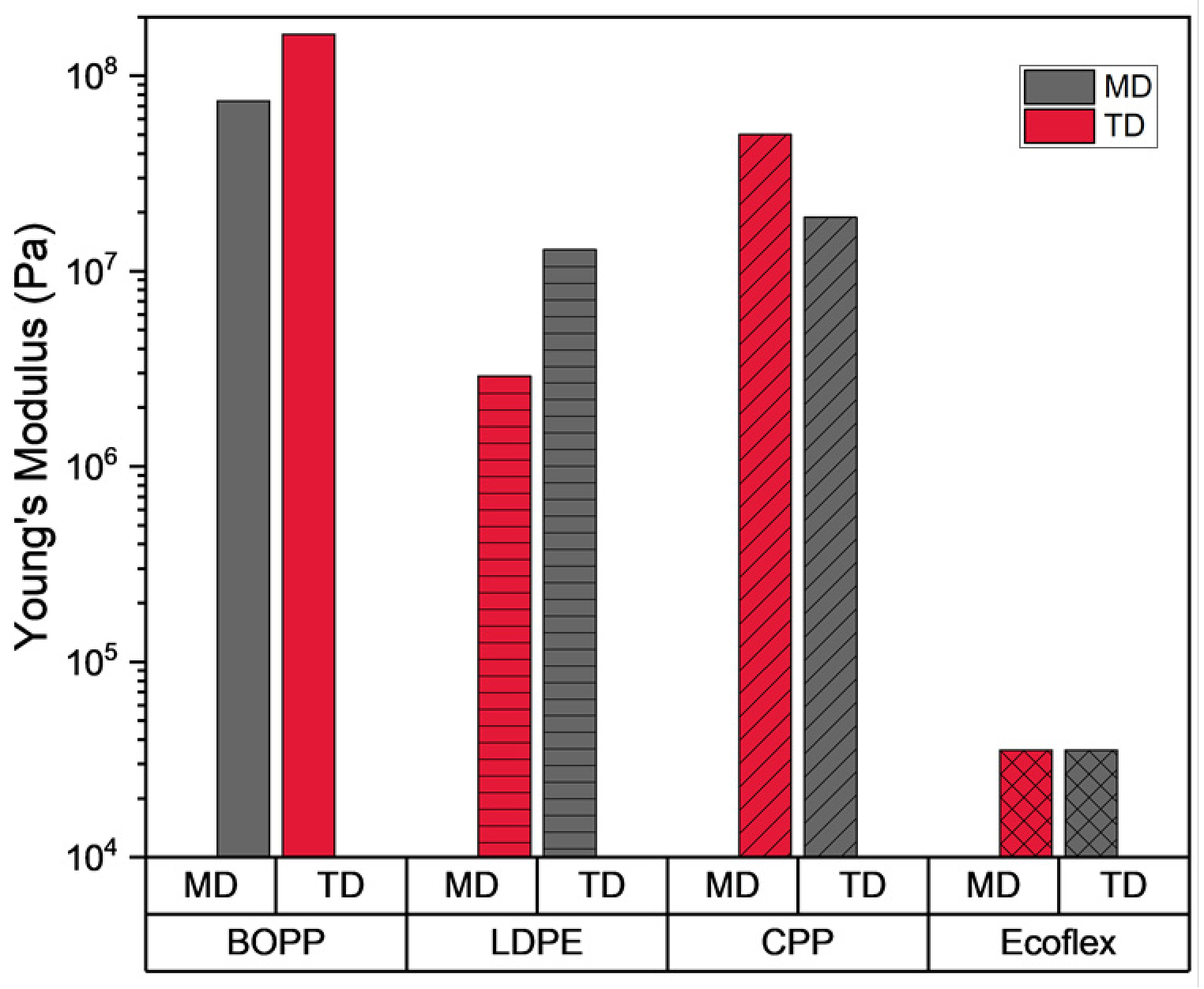
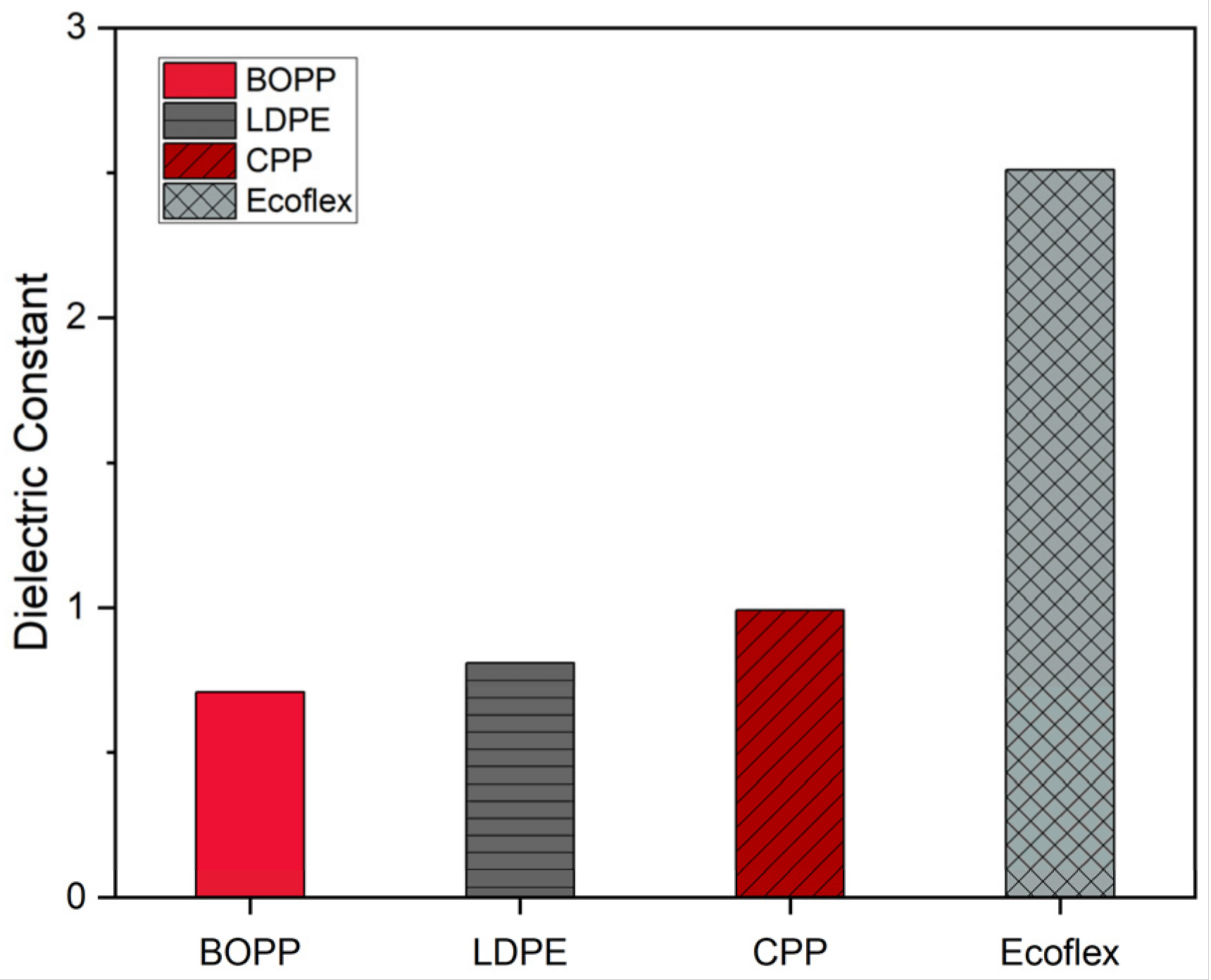
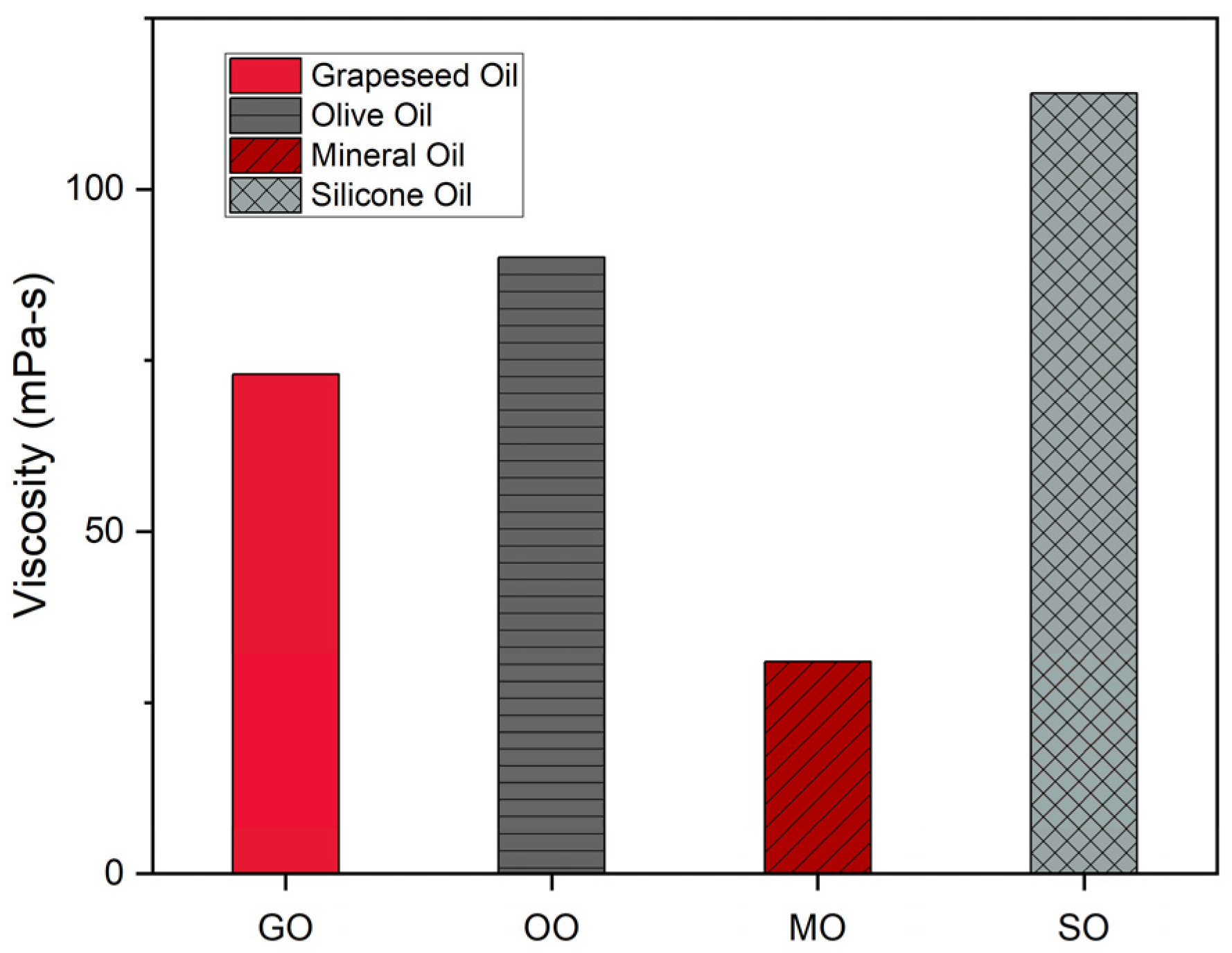
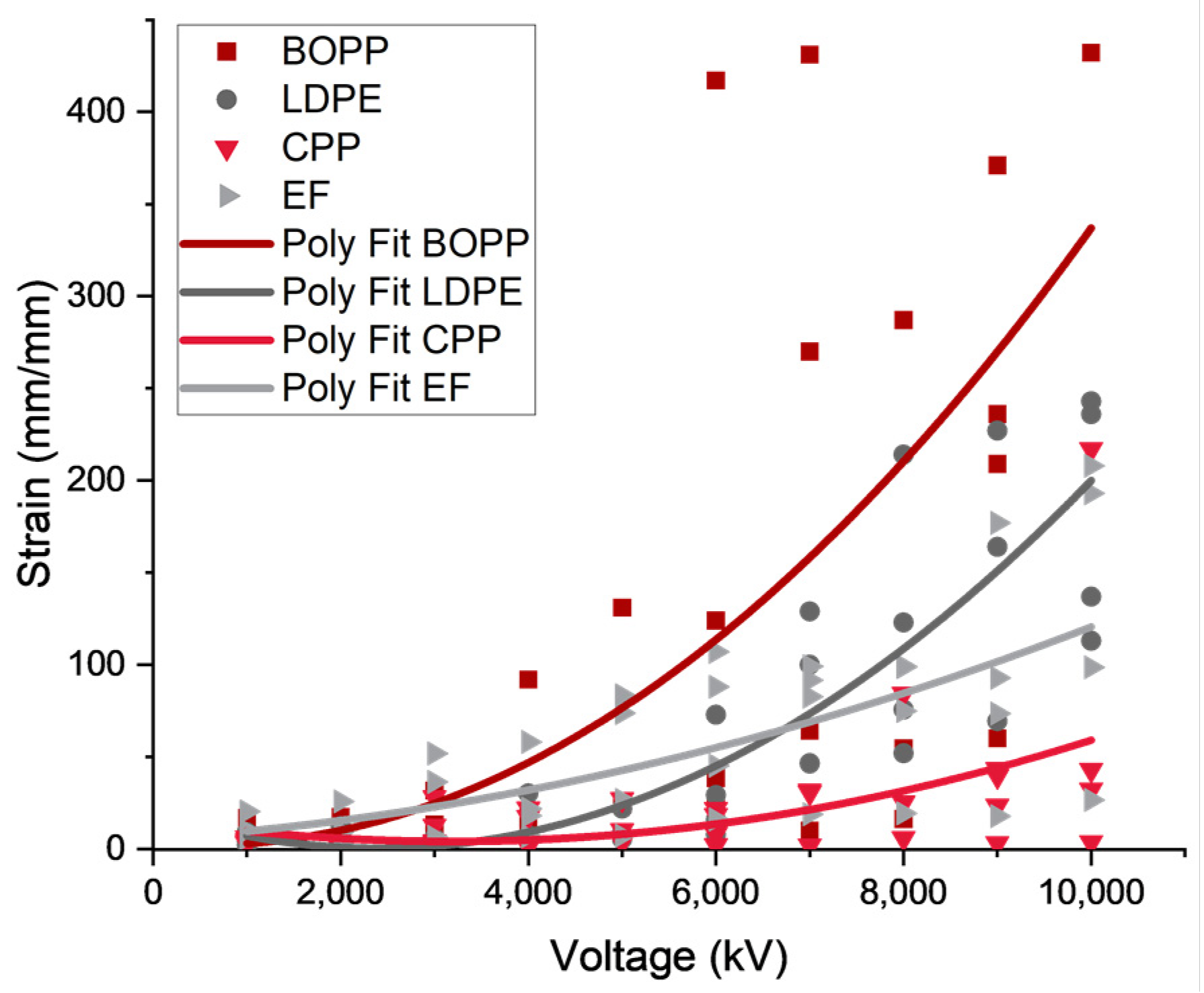
Section 2, the characteristic length is dependent on the deflection of the electrode and the width of the electrode. However, the parameter of note is the deflection, this represents the electrode closure and furthermore the displacement of the fluid in the film packet. Based upon the results of the Π group, only the properties of the fluid and the properties of the film material have an effect on the output of the actuators. More specifically, this describes the ratio of the mass flow rate of the fluid to the viscous forces of the fluid. Thus, describing the displacement of the liquid dielectric. Considering the experimental results, it can be seen that the displacement of the fluid is largely affected by the viscoelastic behavior of the film material. However, the variations seen between the fluid materials can be attributed to the density and viscosity of the fluids. In fact, based on this Π group relationship and the experimental data, when the density and the elastic modulus are both higher (i.e., in the case of olive oil and BOPP) the actuator displacement is higher, meaning that more fluid was displaced. The same result can be seen when the elastic modulus of the material is lower, and the density of the liquid dielectric is lower (i.e., in the case of EF and MO). However, this relationship does not account for all the experimental cases, such as the silicone oil samples. The Π group further displays that the viscosity of the fluid material is a major contribution. For example, looking at silicone oil, it has a higher viscosity and density of all the oils, but when it is contact with a low elastic modulus film, the overall displacement increases. This group describes the relationship between the solid and the fluid materials as it relates to the overall movement of the fluid.
5.2. Π2 Group: Fluid Velocity and Film Stiffness
The fluid velocity is a combined term that was determined in
Section 2, but nonetheless is important to take note of. The fluid velocity not only describes the movement of the fluid but also the reaction time of the actuators. This is because the interaction of a compliant film material affects the speed of the fluid motion. The film material acts as the wall that the fluid is moving against, and is deforming due to the applied force, the pressure of the fluid, and the viscoelastic behavior of the film itself. The current experimental data cannot inform the direct relationship between these quantities as seen in
Section 4. However, finite element modeling insights may be able help draw further conclusions about the relationship between the fluid velocity and the viscoelastic forces from the film material.
5.3. Π3 Group: Output Force—Fluid Pressure and Viscoelastic Contributions
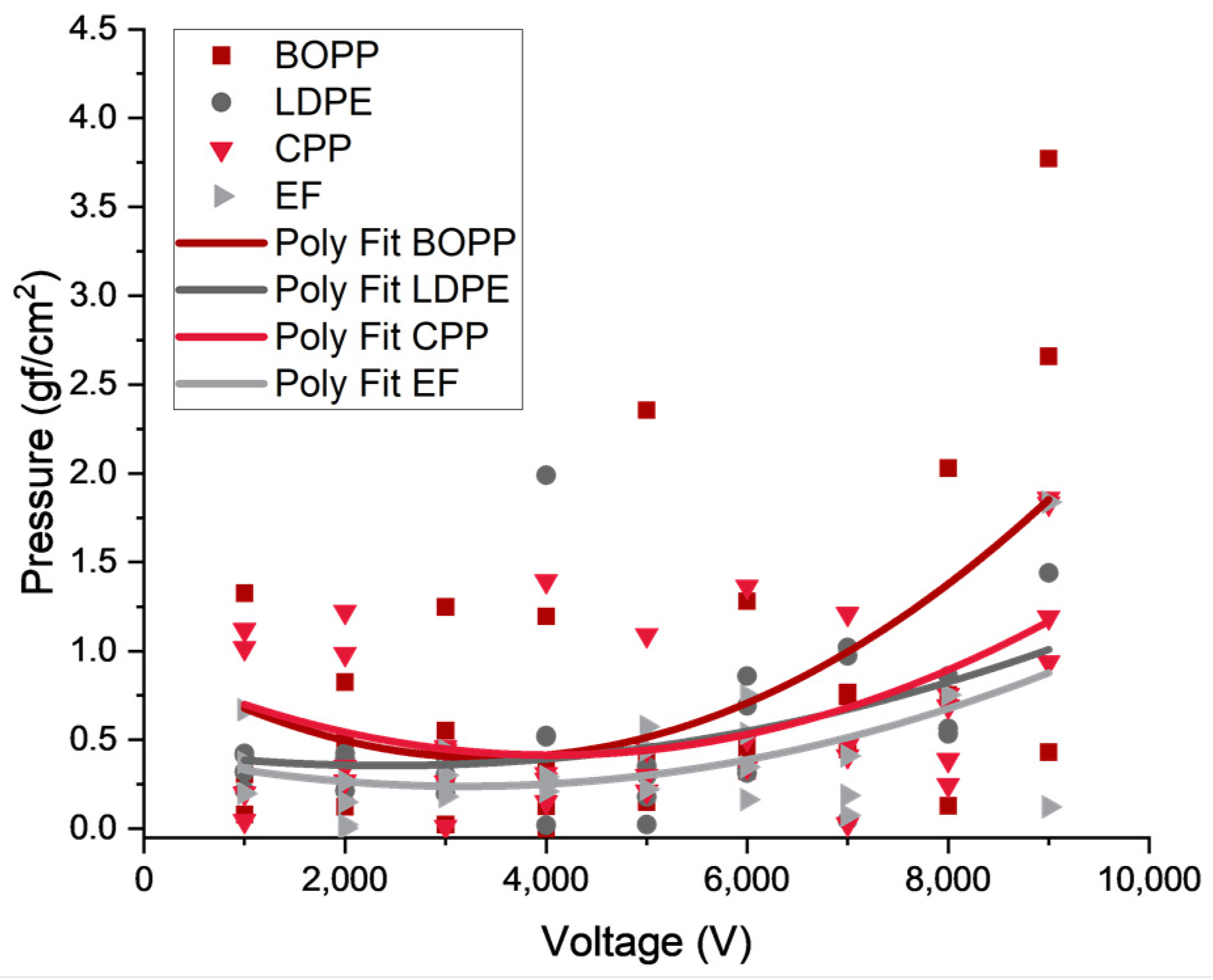
The relationship between the fluid pressure and dielectric materials is interesting because it no longer concerns the fluid properties. It is purely the ratio between the pressure and the stiffness. This Π group describes the output force of the actuator. The film material contributes to the output force due to its stiffness. The liquid dielectric can only deform the film so far; thus, a maximum internal pressure exists due to the stiffness of the film. The output force results from the experimental tests have a correlation between the film material but there is no clear correlation between the output force and the liquid dielectric. This is seen in both versions of the output force test (the load cell test and the lifting force test). This variation in the data is related to the internal pressure contributions. The internal pressure was not measured, so a strong correlation cannot be determined. However, a loose correlation can be made between the output force and the material stiffness. The output force for the load cell tests are higher with a stiffer film material. Thus, the other properties (viscosity and density) of the liquid dielectric do not strongly contribute to the output force.
5.4. Π6 Group [Washington–Kim Group]: The Electro-Mechanical-Hydraulic Relationship
Π6 describes the contribution of all the parameters to the actuation system. This is of particular importance from a theoretical standpoint because this group directly shows the contributions from the electrical, mechanical, and hydraulic relationship, thus this Π group is denoted as the Washington–Kim (WK) group. The analytical equation shows that there is some sort of multiphysics relationship, but the dimensional analysis clarifies the contributions of the independent and dependent parameters. However, the most important feature to note is that this Π group shows the contribution of the electrostatics and the electric field and how that relates to the viscous forces, stiffness, and density.
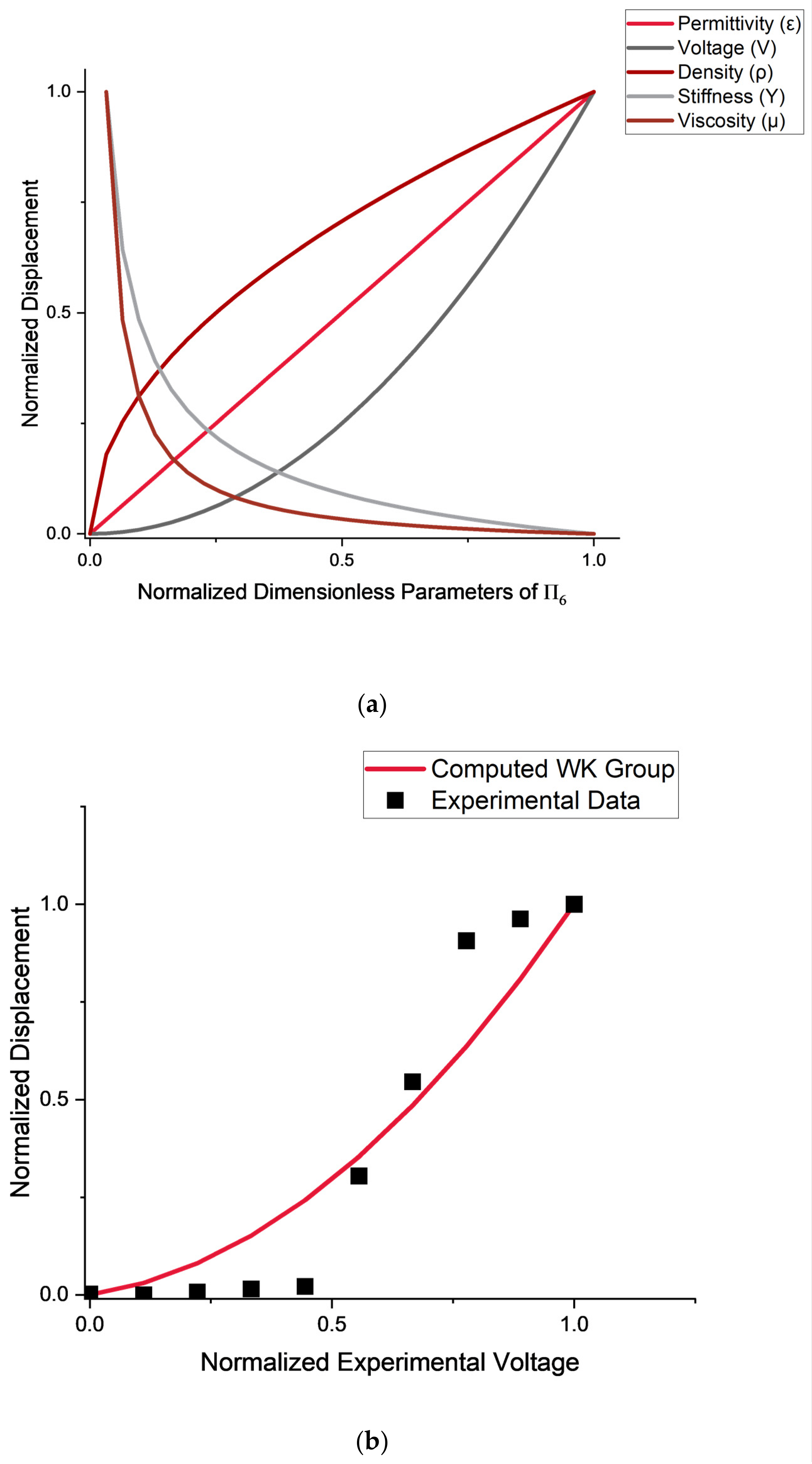
Figure 14a shows the normalized output displacement against the normalized dimensionless parameters of the WK group. From this plot, the contribution of each parameter to the output displacement can be seen. At lower input voltages, the film stiffness and viscoelastic force dominate, resulting in low output (strain and force) from the actuator. However, as the voltage increases the electrostatic force dominates resulting in hydraulic amplification and large outputs. To illustrate this,
Figure 14b displays the normalized displacement of the calculated WK and the normalized experimental results. The group was computed using experimental data for LDPE and mineral oil. This relationship is not exactly V
2 due to the additional factors such as the viscous forces of the fluid, stiffness of the film, and the three-dimensional edge effects. The contributions of these factors can be seen throughout the data. However, based on the results from the experimental data, the applied voltage is the focus. Future work will quantify the contributions of the other factors. To further illustrate the connection between the electrostatic force and the applied voltage, a statistical significance test was conducted on the correlation coefficient between the experimental data and the WK group (
Figure 14b). A correlation coefficient (r
2) of 0.6225 was determined [
28]. From the statistical significance test, it was determined that there is a strong (
p < 0.05) correlation with 62.3% of variance explained (derivation in the
Appendix A). Similar to the other Π groups, the stiffness of the film is the next major contribution to the result after the electrostatics. This is also seen in the experimental data.
5.5. Π8 Group: Electrode Geometry Contribution
The final dimensionless group that is important to note is the contribution from electrode geometry. Based on the group alone, it would seem that the sole connection is the mechanical deformation and the movement of the fluid. However, the electrode area is also directly related to the applied force (the electrostatic force), thus this is another electro-mechanical-hydraulic connection. This is not as overtly seen, as with , but the connection can be seen via the analytical equation. The experimental work does not include the electrode geometry as an experimental parameter so a direct correlation cannot be made. However, the dimensionless group gives an indication of what additional parameters can be considered and their effect on the system.
6. Conclusions and Future Work
Through this study, an analytical equation for the zipping of a HASEL actuator was developed. The development of an analytical model increases the understanding of these electrohydraulic actuators. However, due to the complexity of the actuation system, the analytical model in turn is complex and difficult to solve without alternative methods such as finite element analysis. In an effort to understand how each part of the model is affecting the overall system, dimensional analysis techniques were applied to the analytical equation. This study focused on the creation of eight dimensionless groups that indicate the contribution of the various parameters in the analytical equation and connected them to the experimental results. The experimental study focused on testing the material properties of a variety of materials and then relating the material parameters to the output performance and furthermore the analytical equation. All in all, the experimental results showed that a strong, hard, and tough plastic is beneficial for actuator performance and that the fluid parameters can vary. The dimensional analysis was then used to connect these experimental results with the theory. From the analysis, contributions to the output force, the mass flow rate of the fluid, and the applied force were determined amongst others. Based on these dimensionless groups, it was determined that the stiffness of the film is a major contributor overall. In terms of developing electrohydraulic actuators, this is an important parameter to make note of. This result tells us that a shell material of a specific elastic modulus is necessary to have an effective output (displacement and force). Additionally, the viscous force of the fluid is another overall contribution. More specifically the WK group highlighted the contribution of the electrical, mechanical, and hydraulic components of the actuators. Beyond the beneficial relationships determined from the dimensional analysis, the
groups also revealed additional experimental and modeling work that can be conducted to further the understanding of these actuators.
Future work that can aid in the development of EH actuators is experimentally testing the effect of the internal pressure of the fluid. In addition to testing the internal pressure, the effect of the electrode can also be experimentally tested. This includes varying the geometry of the electrode (surface area and thickness) as well as testing various types of electrodes to see how the mechanical performance is altered. In terms of modeling, finite element methods can be applied to this study to determine parameters such as the fluid velocity. However, this study provides a foundation for understanding the essential parameters for EH actuators. By this, actuator performance can be improved for use in robotic systems and demonstrate that EH actuators are a viable solution for practical applications. All in all, dimensional analysis of EH actuators facilitates the development of high-performance HASEL actuators.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}