
Control Methodologies for Robotic Grippers: A Review



Abstract
:1. Introduction
Objectives
2. Actuation Types and Sensors for Robotic Grippers
2.1. Gripper Types
- Rigid grippers, which rely on rigid mechanical components for the movement of their fingers (e.g., rack-and-pinion mechanisms). These are usually associated with higher gripping forces and lower grasp adaptability. As a consequence, they do not represent the best option to grasp delicate objects with variable shapes.
- Soft grippers, which employ compliant and flexible materials and can better adapt to any shape. These grippers are also more indicated for delicate grasping tasks, as they usually exert smaller forces when compared to rigid grippers.
- Microgrippers, which are useful for the manipulation of very small objects, ranging from tens of micrometers to few millimeters. The actuation of these grippers often rely on particular high-tech materials, e.g., piezoelectric, shape memory alloy (SMA) [10] or else compliant shapes featuring both flexible elements and more rigid ones [11].
2.2. Actuation Principles
- Pneumatically actuated: The most widespread grippers in industry. These grippers are known to be difficult to control due to the well-known challenges of pneumatic control [12]. Usually, these devices feature two air chambers, one for opening the jaws and one for closing them. Mechanically, they are quite simple, and do include only pistons and levers.
- Electrically actuated: These grippers can be controlled more easily than pneumatic ones, at least in terms of jaws position or velocity. They are normally composed of a brushless motor mechanically interfaced to a brake component, and to one or more reduction stages necessary to increase the motor torque. Although more controllable, these devices are bulkier than pneumatic ones and have higher cost.
- Hydraulically actuated: This actuation type works similarly to the pneumatic one, employing hydraulic fluids in place of the compressed air. However, hydraulic grippers are more expensive, require more maintenance and are problematic in case of oil leakage. Such grippers are useful when very heavy objects have to be lifted. With the spread of collaborative robots, characterized by moderate payloads, they became less common.
- Piezoelectrically actuated: A solution mainly used for microgrippers since similar actuators are suited for small and precise displacements, maintaining small sizes and low energy consumption. However, piezoelectric-based actuation may still induce hysteretic behavior and other sources of nonlinearities [13].
2.3. Sensors
- Force sensors, typically positioned on the surface of one or more fingers, which are important to provide the sensory feedback for the closed-loop control of the grasping force. However, these are rarely present on industrial grippers.
- Torque sensors, measuring the applied torque during the grasp. These are more common on electric grippers. More often, one has actual force/torque (F/T) sensors that are either mounted on the gripper fingers or on the wrist of the robotic arm (preferred choice).
- Current sensors, particularly employed on electric grippers to implement current controllers, as the current delivered by the gripper motor directly relates to the applied torque.
- Pressure sensors, mainly used to sense the pressure in the air chambers of pneumatic grippers. Such sensors are fundamental for closing the force loop, as it requires the pressure information in both chambers.
- Position sensors, which serve to quantify the movement of the gripper jaws so as to implement position and/or velocity controllers. These sensors may be employed to measure linear or angular displacement, depending on the implemented controller.
3. Control Strategies
3.1. Proportional Integrative Derivative
3.2. Optimization Based Control
3.3. Fuzzy
- A rule-based set of if–then rules, which contains the expert’s knowledge on how to control the system.
- An inference mechanism, which interprets and applies the rule-base knowledge to control the system. It has three stages: matching, selection of rules and conclusion.
- A fuzzification interface, which converts controller crisp inputs, i.e., a precise value of a measurable quantity, to fuzzy sets that heuristically quantify the meaning of linguistic variables.
- A defuzzification interface, which converts the conclusions of the inference mechanism into actual inputs for the process.
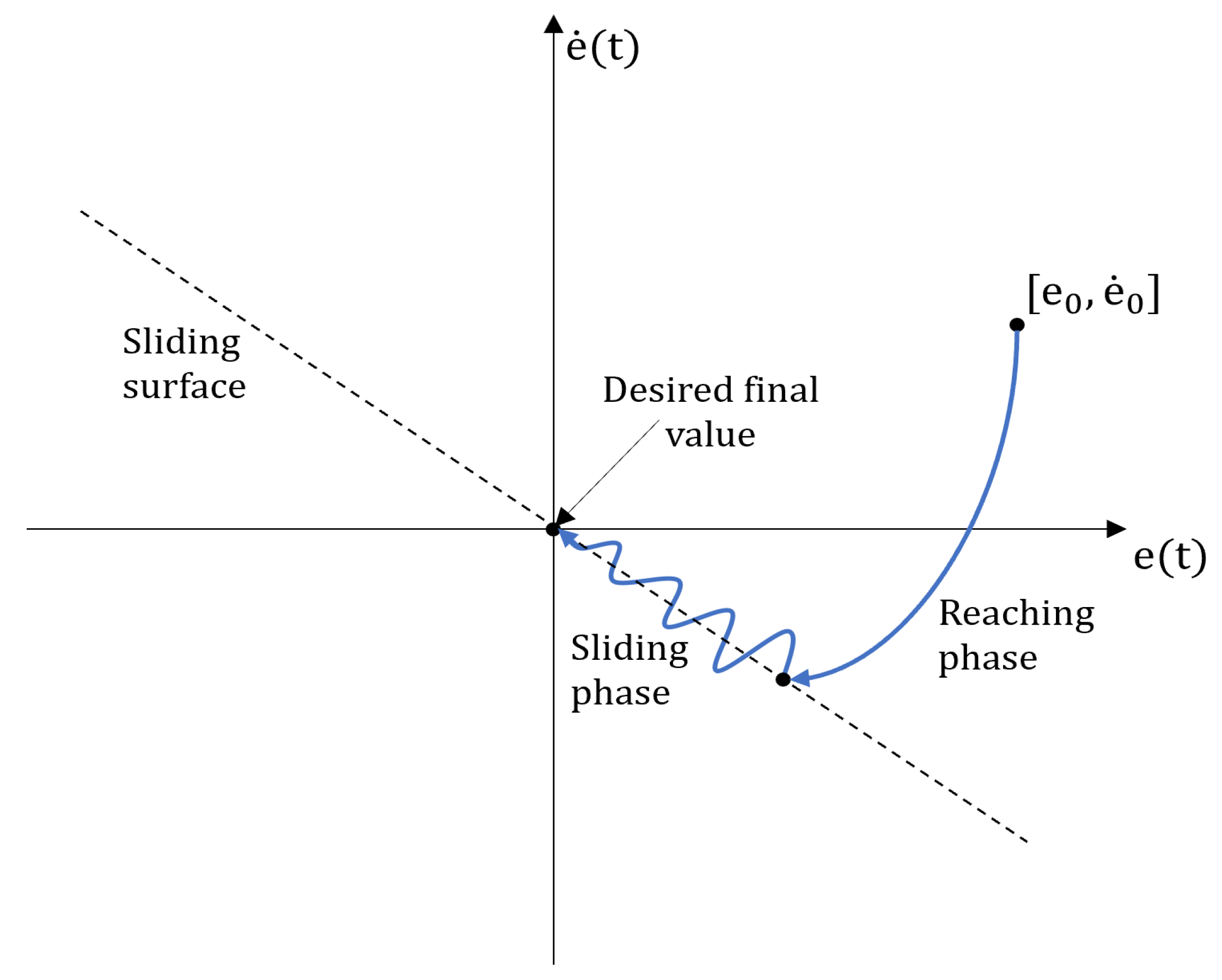
3.4. Sliding Mode Control
- Design of the sliding surface.
- Design of the control input.
3.5. Machine Learning Techniques
3.6. Other Control Architectures
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar] [CrossRef]
- Navas, E.; Fernández, R.; Sepúlveda, D.; Armada, M.; Gonzalez-de Santos, P. Soft grippers for automatic crop harvesting: A review. Sensors 2021, 21, 2689. [Google Scholar] [CrossRef] [PubMed]
- Elfferich, J.F.; Dodou, D.; Della Santina, C. Soft robotic grippers for crop handling or harvesting: A review. IEEE Access 2022, 10, 75428–75443. [Google Scholar] [CrossRef]
- Mazzeo, A.; Aguzzi, J.; Calisti, M.; Canese, S.; Vecchi, F.; Stefanni, S.; Controzzi, M. Marine Robotics for Deep-Sea Specimen Collection: A Systematic Review of Underwater Grippers. Sensors 2022, 22, 648. [Google Scholar] [CrossRef] [PubMed]
- Birglen, L.; Schlicht, T. A statistical review of industrial robotic grippers. Robot.-Comput.-Integr. Manuf. 2018, 49, 88–97. [Google Scholar] [CrossRef]
- Sun, Y.; Falco, J.; Roa, M.A.; Calli, B. Research challenges and progress in robotic grasping and manipulation competitions. IEEE Robot. Autom. Lett. 2021, 7, 874–881. [Google Scholar] [CrossRef]
- Honarpardaz, M.; Tarkian, M.; Ölvander, J.; Feng, X. Finger design automation for industrial robot grippers: A review. Robot. Auton. Syst. 2017, 87, 104–119. [Google Scholar] [CrossRef]
- Lyu, Z.; Xu, Q. Recent design and development of piezoelectric-actuated compliant microgrippers: A review. Sens. Actuators A Phys. 2021, 331, 113002. [Google Scholar] [CrossRef]
- Romeo, R.A.; Zollo, L. Methods and Sensors for Slip Detection in Robotics: A Survey. IEEE Access 2020, 8, 73027–73050. [Google Scholar] [CrossRef]
- Dochshanov, A.; Verotti, M.; Belfiore, N.P. A comprehensive survey on microgrippers design: Operational strategy. J. Mech. Des. 2017, 139, 070801. [Google Scholar] [CrossRef]
- Verotti, M.; Dochshanov, A.; Belfiore, N.P. A comprehensive survey on microgrippers design: Mechanical structure. J. Mech. Des. 2017, 139, 060801. [Google Scholar] [CrossRef]
- Saravanakumar, D.; Mohan, B.; Muthuramalingam, T. A review on recent research trends in servo pneumatic positioning systems. Precis. Eng. 2017, 49, 481–492. [Google Scholar] [CrossRef]
- Mohith, S.; Upadhya, A.R.; Navin, K.P.; Kulkarni, S.; Rao, M. Recent trends in piezoelectric actuators for precision motion and their applications: A review. Smart Mater. Struct. 2020, 30, 013002. [Google Scholar] [CrossRef]
- Chen, W.; Khamis, H.; Birznieks, I.; Lepora, N.F.; Redmond, S.J. Tactile sensors for friction estimation and incipient slip detection—Toward dexterous robotic manipulation: A review. IEEE Sens. J. 2018, 18, 9049–9064. [Google Scholar] [CrossRef]
- Visioli, A. Practical PID Control; Springer Science & Business Media: London, UK, 2006. [Google Scholar]
- Ho, M.T.; Lin, C.Y. PID controller design for robust performance. IEEE Trans. Autom. Control 2003, 48, 1404–1409. [Google Scholar]
- Borase, R.P.; Maghade, D.; Sondkar, S.; Pawar, S. A review of PID control, tuning methods and applications. Int. J. Dyn. Control 2021, 9, 818–827. [Google Scholar] [CrossRef]
- Somefun, O.A.; Akingbade, K.; Dahunsi, F. The dilemma of PID tuning. Annu. Rev. Control 2021, 52, 65–74. [Google Scholar] [CrossRef]
- Ottaviano, E.; Toti, M.; Ceccarelli, M. Grasp force control in two-finger grippers with pneumatic actuation. In Proceedings of the Proceedings 2000 ICRA, Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 1976–1981. [Google Scholar]
- Wang, X.; Xiao, Y.; Fan, X.; Zhao, Y. Design and grip force control of dual-motor drive electric gripper with parallel fingers. In Proceedings of the 2016 IEEE Information Technology, Networking, Electronic and Automation Control Conference, Chongqing, China, 20–22 May 2016; pp. 696–700. [Google Scholar]
- Matos, A.; Caballa, S.; Zegarra, D.; Guzman, M.A.A.; Lizano, D.; Encinas, D.F.G.; Oscanoa, H.; Arce, D. Three-Fingered Gripper for Multiform Object Grasping with Force Feedback Sensing Control. In Proceedings of the 2020 IEEE ANDESCON, Quito, Ecuador, 13–16 October 2020; pp. 1–5. [Google Scholar]
- Saadatzi, M.N.; Das, S.K.; Wijayasinghe, I.B.; Popa, D.O.; Baptist, J.R. Precision grasp control with a pneumatic gripper and a novel fingertip force sensor. In Proceedings of the 2018 IEEE 14th International Conference on Automation Science and Engineering (CASE), Munich, Germany, 20–24 August 2018; pp. 1454–1459. [Google Scholar]
- Shaw, J.S.; Dubey, V. Design of servo actuated robotic gripper using force control for range of objects. In Proceedings of the 2016 International Conference on Advanced Robotics and Intelligent Systems (ARIS), Taipei, Taiwan, 31 August–2 September 2016; pp. 1–6. [Google Scholar]
- Khamis, H.; Xia, B.; Redmond, S.J. Real-time Friction Estimation for Grip Force Control. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 1608–1614. [Google Scholar]
- Qi, J.; Li, X.; Tao, Z.; Feng, H.; Fu, Y. Design and Control of a Hydraulic Driven Robotic Gripper. In Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 27–31 December 2021; pp. 398–404. [Google Scholar]
- Tincani, V.; Grioli, G.; Catalano, M.G.; Garabini, M.; Grechi, S.; Fantoni, G.; Bicchi, A. Implementation and control of the velvet fingers: A dexterous gripper with active surfaces. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2744–2750. [Google Scholar]
- Kim, G.; Hwang, D. BaroTac: Barometric Three-Axis Tactile Sensor with Slip Detection Capability. Sensors 2023, 23, 428. [Google Scholar] [CrossRef]
- Sadun, A.S.; Jalani, J.; Sukor, J.A.; Jamil, F. Force control for a 3-Finger Adaptive Robot Gripper by using PID controller. In Proceedings of the 2016 2nd IEEE International Symposium on Robotics and Manufacturing Automation (ROMA), Ipoh, Malaysia, 25–27 September 2016; pp. 1–6. [Google Scholar]
- Shauri, R.; Salleh, N.; Hadi, A. PID position control of 7-DOF three-fingered robotic hand for grasping task. In Proceedings of the 2014 IEEE International Conference on Control System, Computing and Engineering (ICCSCE 2014), Penang, Malaysia, 28–30 November 2014; pp. 70–74. [Google Scholar]
- Kladovasilakis, N.; Sideridis, P.; Tzetzis, D.; Piliounis, K.; Kostavelis, I.; Tzovaras, D. Design and Development of a Multi-Functional Bioinspired Soft Robotic Actuator via Additive Manufacturing. Biomimetics 2022, 7, 105. [Google Scholar] [CrossRef]
- Gai, L.J.; Zong, X.; Huang, J. A global, continuous calibration curvature strategy for bending sensors of soft fingers. Ind. Robot. Int. J. Robot. Res. Appl. 2022, 50, 562–570. [Google Scholar] [CrossRef]
- Tawk, C.; Sariyildiz, E.; Alici, G. Force control of a 3D printed soft gripper with built-in pneumatic touch sensing chambers. Soft Robot. 2022, 9, 970–980. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Tang, Y.; Li, C. Controlling bending deformation of a shape memory alloy-based soft planar gripper to grip deformable objects. Int. J. Mech. Sci. 2021, 193, 106181. [Google Scholar] [CrossRef]
- Gonzalez, C.; Lumia, R. An IPMC microgripper with integrated actuator and sensing for constant finger-tip displacement. Smart Mater. Struct. 2015, 24, 055011. [Google Scholar] [CrossRef]
- Zhao, Y.; Huang, X.; Liu, Y.; Wang, G.; Hong, K. Design and control of a piezoelectric-driven microgripper perceiving displacement and gripping force. Micromachines 2020, 11, 121. [Google Scholar] [CrossRef] [PubMed]
- Lyu, Z.; Xu, Q. Novel design of a piezoelectrically actuated compliant microgripper with high area-usage efficiency. Precis. Eng. 2022, 76, 1–11. [Google Scholar] [CrossRef]
- Romanov, A.M.; Gyrichidi, N.; Romanov, M.P. A Novel Gripper with Integrated Rotary Unit and Force Control for Pick and Place Applications. Robotics 2022, 11, 155. [Google Scholar] [CrossRef]
- Rafeedi, F.A.; Yoon, J.H.; Hong, D. Design and Control of a Novel Compact Nonlinear Rotary Magnetic SEA (MSEA) for Practical Robotic Gripper Implementation. IEEE Robot. Autom. Lett. 2021, 6, 7643–7650. [Google Scholar] [CrossRef]
- Best, M.J. An algorithm for the solution of the parametric quadratic programming problem. In Applied mathematics and parallel computing; Springer: Berlin/Heidelberg, Germany, 1996; pp. 57–76. [Google Scholar]
- Romeo, R.A.; Fiorio, L.; Avila-Mireles, E.J.; Cannella, F.; Metta, G.; Pucci, D. Closed-loop force control of a pneumatic gripper actuated by two pressure regulators. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 7157–7162. [Google Scholar]
- Romeo, R.A.; Fiorio, L.; L’Erario, G.; Maggiali, M.; Metta, G.; Pucci, D. Dynamic control of a rigid pneumatic gripper. IEEE Robot. Autom. Lett. 2020, 5, 2793–2800. [Google Scholar] [CrossRef]
- Romeo, R.A.; Zocco, A.; Fiorio, L.; Pucci, D.; Maggiali, M. Force Control With Friction Compensation In A Pneumatic Gripper. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October2021; pp. 7231–7237. [Google Scholar]
- Romeo, R.A.; Zocco, A.; Fiorio, L.; Maggiali, M. A Quadratic-Programming Approach for the Real-Time Control of the Fingers Position in Industrial Pneumatic Grippers. IEEE Control Syst. Lett. 2022, 7, 859–864. [Google Scholar] [CrossRef]
- Calli, B.; Dollar, A.M. Vision-based model predictive control for within-hand precision manipulation with underactuated grippers. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 2839–2845. [Google Scholar]
- Passino, K.M.; Yurkovich, S.; Reinfrank, M. Fuzzy Control; Addison-wesley Reading: Boston, MA, USA, 1998; Volume 42. [Google Scholar]
- Sadeghian, R.; Sedigh, P.; Azizinezhad, P.; Shahin, S.; Masouleh, M.T. Design, development and control of a three flexible-fingers gripper based on hand gesture. In Proceedings of the 2018 6th RSI International Conference on Robotics and Mechatronics (IcRoM), Tehran, Iran, 23–25 October 2018; pp. 359–363. [Google Scholar]
- Rezaeian, A.; Yousefi-Koma, A. Accurate Force Control in a Miniature Gripper with a Single SMA Wire. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Montreal, QC, Canada, 14–24 November 2014; American Society of Mechanical Engineers: New York, NY, USA, 2014; Volume 46483, p. V04BT04A067. [Google Scholar]
- Xiangjin, Z.; Jimin, W.; Pengpeng, S.; HUANG, S. A Novel Piezoelectric Micro-gripper’s Control Based on Modified Smith Predictor. In Proceedings of the 2017 International Conference on Electronic Industry and Automation (EIA 2017), Suzhou, China, 23–25 June 2017; Atlantis Press: Amsterdam, The Netherlands, 2017; pp. 277–281. [Google Scholar]
- Huynh, B.P.; Kuo, Y.L. Optimal fuzzy impedance control for a robot gripper using gradient descent iterative learning control in fuzzy rule base design. Appl. Sci. 2020, 10, 3821. [Google Scholar] [CrossRef]
- Deng, H.; Luo, J.; Duan, X.; Zhong, G. Adaptive inverse control for gripper rotating system in heavy-duty manipulators with unknown dead zones. IEEE Trans. Ind. Electron. 2017, 64, 7952–7961. [Google Scholar] [CrossRef]
- Zaki, A.; Soliman, A.; Mahgoub, O.; El-Shafei, A. Design and implementation of efficient intelligent robotic gripper. In Proceedings of the Proceedings of the 2010 International Conference on Modelling, Identification and Control, Okayama, Japan, 17–19 July 2010; pp. 710–716.
- Dimeas, F.; Sako, D.V.; Moulianitis, V.C.; Aspragathos, N.A. Design and fuzzy control of a robotic gripper for efficient strawberry harvesting. Robotica 2015, 33, 1085–1098. [Google Scholar] [CrossRef]
- Birglen, L.; Gosselin, C.M. Fuzzy enhanced control of an underactuated finger using tactile and position sensors. In Proceedings of the Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; pp. 2320–2325.
- Zhang, J.; Yang, Y.; Lou, J.; Wei, Y.; Fu, L. Development and hybrid position/force control of a dual-drive macro-fiber-composite microgripper. Sensors 2018, 18, 1301. [Google Scholar] [CrossRef] [PubMed]
- Bartolini, G.; Ferrara, A.; Levant, A.; Usai, E. On second order sliding mode controllers. In Variable Structure Systems, Sliding Mode and Nonlinear Control; Springer: Berlin, Germany, 1999; pp. 329–350. [Google Scholar]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014; Volume 10. [Google Scholar]
- Young, K.D.; Utkin, V.I.; Ozguner, U. A control engineer’s guide to sliding mode control. IEEE Trans. Control Syst. Technol. 1999, 7, 328–342. [Google Scholar] [CrossRef]
- Khan, S.; Elitas, M.; Kunt, E.D.; Sabanovic, A. Discrete sliding mode control of piezo actuator in nano-scale range. In Proceedings of the 2006 IEEE International Conference on Industrial Technology, Mumbai, India, 15–17 December 2006; pp. 1454–1459. [Google Scholar]
- Xu, Q. Adaptive discrete-time sliding mode impedance control of a piezoelectric microgripper. IEEE Trans. Robot. 2013, 29, 663–673. [Google Scholar] [CrossRef]
- Xu, Q. Design and smooth position/force switching control of a miniature gripper for automated microhandling. IEEE Trans. Ind. Inform. 2013, 10, 1023–1032. [Google Scholar]
- Xu, Q. Digital sliding-mode control of piezoelectric micropositioning system based on input–output model. IEEE Trans. Ind. Electron. 2013, 61, 5517–5526. [Google Scholar]
- Liu, Y.; Zhang, Y.; Xu, Q. Design and control of a novel compliant constant-force gripper based on buckled fixed-guided beams. IEEE/ASME Trans. Mechatronics 2016, 22, 476–486. [Google Scholar] [CrossRef]
- Zhang, Y.; Xu, Q. Adaptive sliding mode control with parameter estimation and Kalman filter for precision motion control of a piezo-driven microgripper. IEEE Trans. Control Syst. Technol. 2016, 25, 728–735. [Google Scholar] [CrossRef]
- Wu, Z.; Li, Y. Design and control of a novel micro-gripper using adaptive backstepping slide mode control method. Microsyst. Technol. 2021, 27, 4227–4239. [Google Scholar] [CrossRef]
- Heydarabad, S.M.; Milella, F.; Davis, S.; Nefiti-Meziani, S. High-performing adaptive grasp for a robotic gripper using super twisting sliding mode control. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5852–5857. [Google Scholar]
- Huang, S.J.; Chang, W.H.; Su, J.Y. Intelligent robotic gripper with adaptive grasping force. Int. J. Control Autom. Syst. 2017, 15, 2272–2282. [Google Scholar] [CrossRef]
- Choi, S.B.; Lee, C.H. Force tracking control of a flexible gripper driven by piezoceramic actuators. J. Dyn. Sys. Meas. Control. 1997, 119, 439–446. [Google Scholar] [CrossRef]
- O’Toole, M.; Bouazza-Marouf, K.; Kerr, D.; Vloeberghs, M. Robust contact force controller for slip prevention in a robotic gripper. Proc. Inst. Mech. Eng. Part J. Syst. Control Eng. 2010, 224, 275–288. [Google Scholar] [CrossRef]
- Dhanalakshmi, K. Demonstration of self-sensing in shape memory alloy actuated gripper. In Proceedings of the 2013 IEEE International Symposium on Intelligent Control (ISIC), Hyderabad, India, 28–30 August 2013; pp. 218–222. [Google Scholar]
- Shaw, J.S.; Lee, J.L. Force control of a robot gripper featuring shape memory alloy actuators. In Proceedings of the 2014 International Conference on Advanced Robotics and Intelligent Systems (ARIS), Taipei, Taiwan, 6–8 June 2014; pp. 23–28. [Google Scholar]
- Sadollah, A. Fuzzy Logic Based in Optimization Methods and Control Systems and Its Applications; BoD–Books on Demand: Norderstedt, Germany, 2018. [Google Scholar]
- Du, G.; Wang, K.; Lian, S.; Zhao, K. Vision-based robotic grasping from object localization, object pose estimation to grasp estimation for parallel grippers: A review. Artif. Intell. Rev. 2021, 54, 1677–1734. [Google Scholar] [CrossRef]
- Kleeberger, K.; Bormann, R.; Kraus, W.; Huber, M.F. A survey on learning-based robotic grasping. Curr. Robot. Rep. 2020, 1, 239–249. [Google Scholar] [CrossRef]
- Petković, D.; Danesh, A.S.; Dadkhah, M.; Misaghian, N.; Shamshirband, S.; Zalnezhad, E.; Pavlović, N.D. Adaptive control algorithm of flexible robotic gripper by extreme learning machine. Robot.-Comput.-Integr. Manuf. 2016, 37, 170–178. [Google Scholar] [CrossRef]
- Su, Z.; Hausman, K.; Chebotar, Y.; Molchanov, A.; Loeb, G.E.; Sukhatme, G.S.; Schaal, S. Force estimation and slip detection/classification for grip control using a biomimetic tactile sensor. In Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Republic of Korea, 3–5 November 2015; pp. 297–303. [Google Scholar]
- Thompson, J.; Murakami, T. Cognitive Grasping and Manipulation of Unknown Object with Control Grip Force using Cyber Physical System Approach. IEEJ J. Ind. Appl. 2022, 11, 744–751. [Google Scholar] [CrossRef]
- Koh, K.H.; Farhan, M.; Liu, Y.F.; Chan, F.H.L.; Lai, K.W.C. Learning to Grasp Unknown Objects using Force Feedback. In Proceedings of the 2017 IEEE 7th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Honolulu, HI, USA, 31 July–4 August 2017; pp. 472–477. [Google Scholar]
- Pei, Y.C.; Wang, B.H.; Wu, J.T.; Wang, C.; Guan, J.H.; Lu, H. A Machine Learning Empowered Shape Memory Alloy Gripper with Displacement-Force-Stiffness Self-sensing. IEEE Trans. Ind. Electron. 2022, 70, 10385–10395. [Google Scholar] [CrossRef]
- Brown, M.K. A controlled impedance robot gripper. AT&T Tech. J. 1985, 64, 937–969. [Google Scholar]
- Ji, W.; Zhang, J.; Xu, B.; Tang, C.; Zhao, D. Grasping mode analysis and adaptive impedance control for apple harvesting robotic grippers. Comput. Electron. Agric. 2021, 186, 106210. [Google Scholar] [CrossRef]
- Lu, L.; Liu, Q.; Liang, C.; Tang, X.; Xu, D.; Yang, X.; Han, B. Impedance Control for Underwater Gripper Compliant Grasping in Unstructured Environment. In Intelligent Robotics and Applications: 14th International Conference, ICIRA 2021, Yantai, China, 22–25 October 2021; Springer: Cham, Switzerland, 2021; pp. 279–289. [Google Scholar]
- Li, Y.; Chen, Y.; Li, Y. Pre-charged pneumatic soft gripper with closed-loop control. IEEE Robot. Autom. Lett. 2019, 4, 1402–1408. [Google Scholar] [CrossRef]
- Jiang, A.; Bimbo, J.; Goulder, S.; Liu, H.; Song, X.; Dasgupta, P.; Althoefer, K.; Nanayakkara, T. Adaptive grip control on an uncertain object. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 1161–1166. [Google Scholar]
- Al-Mohammed, M.; Ding, Z.; Liu, P.; Behal, A. An adaptive control based approach for gripping novel objects with minimal grasping force. In Proceedings of the 2018 IEEE 14th International Conference on Control and Automation (ICCA), Anchorage, AK, USA, 12–15 June 2018; pp. 1040–1045. [Google Scholar]
- Zuo, W.; Song, G.; Chen, Z. Grasping Force Control of Robotic Gripper With High Stiffness. IEEE/ASME Trans. Mechatronics 2021, 27, 1105–1116. [Google Scholar] [CrossRef]
- Azahar, M.I.P.; Irawan, A.; Ramli, M.S. Transient Control Improvement on Pneumatic Servoing in Robot System using Fractional-Order PID with Finite-time Prescribed Performance Control. In Proceedings of the 2022 IEEE 12th Symposium on Computer Applications & Industrial Electronics (ISCAIE), Penang, Malaysia, 21–22 May 2022; pp. 206–210. [Google Scholar]
- Jin, H.; Gao, X.; Ren, K.; Liu, J.; Qiao, L.; Liu, M.; Chen, W.; He, Y.; Dong, S.; Xu, Z.; et al. Review on piezoelectric actuators based on high performance piezoelectric materials. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2022, 69, 3057–3069. [Google Scholar] [CrossRef]
- Xiao, H.; Zhao, D.; Gao, S.; Spurgeon, S.K. Sliding mode predictive control: A survey. Annu. Rev. Control 2022, 54, 148–166. [Google Scholar] [CrossRef]
- Romeo, R.A.; Zocco, A.; Parmiggiani, A.; Mura, A.; Gesino, M.; Accame, M.; Maggiali, M.; Fiorio, L. Instrumenting a Robotic Finger to Augment the Capabilities of Robotic Grippers. IEEE Trans. Instrum. Meas. 2023, 72, 1–11. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controllers | Advantages | Disadvantages |
|---|---|---|
| PID [18,19,20,21,22,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37] | - Simple design and implementation - Can be model-free - Manual parameter tuning fast on grippers - Easily integrated into other control architectures (e.g., QP or fuzzy) | - Nonlinearities difficult to handle (e.g., chamber air flow or friction between jaws and mechanical guides) - Often suboptimal solution |
| SMC [58,59,60,61,62,63,64,65,66,67,68,69,70] | - Robust to system nonlinearities when high control frequencies, up to 600 kHz, are available (e.g., hysteresis for piezoelectric microgrippers) | - Chattering - Sliding surface may be difficult to design - Very high operational frequencies are not common in gripper actuation |
| Fuzzy [45,46,47,48,49,50,51,52,53] | - Practical way to implement human heuristic knowledge - Model-free implementation | - Human-like reasoning implementation is often insufficient for grippers - Unnecessary complexity |
| Optimization Based [39,40,41,42] | - Constraints quick and intuitive to implement - Suitable to save energy | - Precise modeling required (difficult for soft or compliant grippers) - Computation times may be too high |
| Machine Learning [75,76,77,78,79] | - Great potential on systems difficult to model (e.g., soft or compliant grippers) with complex dynamics | - Large amounts of data for training and maintenance - Data scarcity due to poor instrumentation, especially in industrial field |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cortinovis, S.; Vitrani, G.; Maggiali, M.; Romeo, R.A. Control Methodologies for Robotic Grippers: A Review. Actuators 2023, 12, 332. https://doi.org/10.3390/act12080332
Cortinovis S, Vitrani G, Maggiali M, Romeo RA. Control Methodologies for Robotic Grippers: A Review. Actuators. 2023; 12(8):332. https://doi.org/10.3390/act12080332
Chicago/Turabian StyleCortinovis, Simone, Giuseppe Vitrani, Marco Maggiali, and Rocco Antonio Romeo. 2023. "Control Methodologies for Robotic Grippers: A Review" Actuators 12, no. 8: 332. https://doi.org/10.3390/act12080332
APA StyleCortinovis, S., Vitrani, G., Maggiali, M., & Romeo, R. A. (2023). Control Methodologies for Robotic Grippers: A Review. Actuators, 12(8), 332. https://doi.org/10.3390/act12080332