1. Introduction
Soft robots, as a research focus in the field of robotics, offer advantages over rigid robots, including high flexibility, excellent adaptability to the environment, and theoretically infinite degrees of freedom [
1,
2,
3]. They have significant advantages in human–robot interaction, biomimicry, and operations in confined spaces, driving major breakthroughs in materials and design for biomimetic robots [
4,
5,
6]. The inchworm, as a typical organism that crawls in a point-movement manner, with its unique and simple “Ω”-shaped movement, is a suitable model for the study of biomimetic soft crawling robots [
7,
8].
Currently, there is a diverse range of inchworm-inspired robots both domestically and internationally. The design approaches generally fall into two categories: simulating the adhesive function of the inchworm’s foot muscles [
9] and simulating the coiling of the inchworm’s body in the middle driving section [
10]. As shown in [
11], the design of the foot section of the inchworm-inspired soft robot can be categorized into adhesive type and friction-changing type based on the contact relationship between its foot and the crawling surface during motion. Adhesive design refers to the use of adhesive devices in the foot structure, alternately controlling the adhesion of the front and rear feet to the ground, allowing the soft robot to crawl. A static electricity adhesive soft robot has been developed in [
12], where the foot uses a static electricity adhesive device to control the release of static electricity to adjust the adhesion between the soft robot’s foot and the ground. In [
13], the robot’s foot design uses a gripping device, with the legs adopting a nylon buckle structure to grip specific surfaces for crawling. However, compared to static electricity adhesion, it is challenging for a gripping device to change the adhesion level of the foot. Friction-changing design uses the friction force between the inchworm’s two feet and the ground to achieve crawling by generating friction differences between the front and rear feet during robot motion. In [
14], an inchworm-inspired soft robot has been developed with a foot design where the front and rear feet use materials with different friction coefficients, causing different friction forces between the front and rear feet during crawling. The adhesive and friction-changing designs each have their advantages and disadvantages. An adhesive design often has better performance, but is more complex in design, requiring additional driving controls for foot adhesion. A friction-changing design mainly achieves crawling by changing the dynamic friction force between the front and rear feet, without the need for additional driving. Considering the small size of the designed soft robot, this study chooses a friction-changing foot design, using conical soft hairs on the sole to change the friction coefficient between the front and rear feet, thus creating a friction difference to drive the soft robot’s crawling.
The torso of the inchworm-inspired soft robot needs to be designed with a driver to mimic the inchworm’s body coiling. Currently, there are three main driving methods for the middle section of inchworm-inspired soft robots: gas-driven, cable-driven, and smart material-driven. In [
15], an inchworm-inspired soft robot is gas-driven, inflating the gas chamber with gas. The differential extensibility of the soft material causes coiling as the central driving mechanism. The robot designed in [
16] uses a cable-driven control to coil the body of the inchworm robot. In [
17], an inchworm-inspired soft robot is designed based on the smart material Ionic Electroactive Polymer (IEAP) for driving. As shown in reference [
18], a soft robot modeled after a leech and driven by SMA actuators has been developed. This robot crawls by electrifying the SMA material to contract it. Considering that the designed inchworm-inspired soft robot is small in size and does not require significant driving force, gas-driven systems often require large external devices, cable-driven systems need more external conditions, and many smart materials require multiple driving conditions. Smart material SMA has a small volume, low cost, and simple driving mechanism, making it well-suited to meet the driving requirements. Therefore, this study chooses smart material SMA as the driving element for the torso to simulate the inchworm’s body coiling.
The modelling of the inchworm-inspired soft robot mainly involves two parts: the kinematic modelling of the soft robot and the modelling of the shape memory process of the smart material SMA. Kinematic modelling primarily analyzes the forces and motion displacement of the soft robot [
19]. As shown in [
20], the kinematic modelling of the soft robot simplifies the feet into two points and the body into a curved beam to analyze the forces and motion states of the feet. For the modelling of the smart material SMA, it mainly describes the process of its shape memory due to electrical heating. A significant amount of research has been conducted on its modeling, especially the establishment of SMA constitutive models. As described in [
21], the modelling process of SMA can be broadly divided into establishing thermodynamic models, phase transition dynamic models, and constitutive models. Various traditional SMA models were compared in reference [
22], such as the Tanaka constitutive model and the Liang and Brinson series constitutive models. Analyzing these traditional constitutive models, it is not difficult to find that traditional models have parameters that are difficult to measure, such as the volume fraction of martensite, which affects the control of soft robots. Additionally, SMA materials from different manufacturers may vary, making traditional constitutive models not accurately applicable to all SMA materials. Modeling-related knowledge of dielectric elastomers is introduced in reference [
23], where a new model for dielectric elastomers is established using mathematical methods, addressing challenges in controlling due to difficulties in characterizing certain parameters. Various mathematical methods for modeling soft robots are discussed in reference [
24]. In this study, combining the above literature, we analyzed traditional models of SMA actuators and, addressing the difficulty of representation in traditional constitutive models, re-established the constitutive model of SMA actuators using mathematical methods. In conjunction with the model of the SMA actuator, we established the kinematic model of the soft robot.
Building upon prior research, this paper analyzes the kinematic mechanism of the inchworm, employing a smart material SMA as the actuator in the soft robot’s core and for the foot with a variable friction design. To assess the motion characteristics of the inchworm-inspired soft robot, a multi-field coupled kinematic model incorporating electrical, thermal, and force elements is constructed. Addressing the challenge of the difficult measurement of martensite volume fraction, which complicates the representation of traditional constitutive models, a specialized constitutive model for SMA materials is derived. Crawling motion experiments are designed to reveal general principles governing the locomotion of the soft inchworm robot. The insights gained hold significance for the future design and motion analysis of bio-inspired crawling robots.
3. Modeling of Electrical–Thermal–Mechanical Multi-Field Coupling in Soft Robots
The modelling of the caterpillar-inspired soft robot encompasses the constitutive equations of SMA, phase transition dynamics equations, thermodynamic equations, and the kinematic equations of the robot.
3.1. Thermodynamic Equation
Electrically heating the SMA spring that drives the robot’s motion, a portion of the electrical energy transforms into the internal energy and latent heat of phase transition in the SMA spring, triggering a heating-induced phase transition. Another portion does work on the environment, dissipating away. Therefore, the thermodynamic equilibrium equation for the SMA spring is given by:
where
is the mass of the SMA material,
is the specific heat capacity of the SMA material, T is the temperature of the SMA material,
is the ambient temperature, I is the heating current,
is the duration of electrical heating,
is the electrical resistance of the SMA material,
is the electrical characteristic parameter of the SMA material,
is the volume fraction of martensite in the SMA material,
is the thermal conductivity parameter, and
is the heat exchange area.
3.2. Material Constitutive Equation
In 1986, based on the differential forms of the first and second laws of thermodynamics, Tanaka established the constitutive model of SMA by incorporating knowledge of thermodynamics. In 1990, Liang et al. built upon Tanaka’s constitutive equation, replacing the Tanaka exponential phase transition equation with a cosine form and assuming constant elastic modulus, phase transition modulus, and thermoelastic modulus in the Tanaka constitutive equation. Building on the work of Tanaka and Liang, Brinson considered the influence of stress on the volume fraction of martensite, refining the shape memory model of SMA [
22].
Tanaka’s incremental constitutive model is as follows:
where
is the elastic modulus,
is the phase transition modulus, and
is the thermoelastic modulus.
As shown in Equation (1), Tanaka and colleagues’ model describes the shape memory effect of SMA springs using parameters like martensite volume fraction, temperature, and strain. Given the difficulty in measuring values such as the martensite volume fraction in laboratories, experiments typically focus on the relationship between strain, stress, and temperature. The Taylor series can replace traditional constitutive equations with a polynomial, aiding in the development of a new constitutive model. Building on previous SMA modeling efforts, this paper combines thermodynamic laws and the Taylor series to derive a constitutive equation that solely relates stress, strain, and temperature, capturing the constitutive behavior of SMA alloys.
Considering the practical requirement for a relationship only between stress, strain, and temperature, let us assume:
Expanding (1) at the initial state using bivariate Taylor series gives:
In the phase transition process, SMA adheres to the Clausius–Clapeyron equation, expressed as:
where
is the latent heat of phase transition from austenite to martensite in the shape memory alloy,
is the density of SMA, and
is the latent potential of phase transition from austenite to martensite in the shape memory alloy.
From Equations (3) and (4), it is apparent that the rate of change of stress with respect to temperature is constant, and the higher-order derivatives of stress with respect to temperature are all zero. Consequently, we have:
Furthermore, since the initial conditions are zero and the values of higher-order terms are negligible, and given that the soft robot does not require a high degree of model accuracy, the higher-order terms can be ignored. Therefore, the constitutive model for SMA is given by:
where:
and
are undetermined parameters.
3.3. Tanaka’s Equation for Phase Transition Dynamics
The first proposed phase transition dynamics equation for martensite by Meger [
22] is:
where
is the average volume of the newly formed martensite,
is a constant, and
is the free energy driving force for martensite phase transition.
Assuming
and
are constants, integrating Equation (7) over temperature T from
to T, and considering the zero-stress state of martensite during its phase transition, the volume fraction is expressed as:
where
is a constant, and
and
are the temperatures at the end and the beginning of martensite phase transition, respectively.
Then, during the austenite phase transition:
where
is a constant, and
and
are the temperatures marking the end and the start of martensite phase transition, respectively.
When considering the presence of stress, the phase transition temperatures of SMA will change, and the temperature ranges in the above equations need to be adjusted.
As shown in
Figure 5, the phase transition temperature under stress exhibits a linear relationship with stress; therefore, it can be derived as:
where
and
are the influence coefficients for martensite and austenite, respectively.
and
represent the corrected starting temperature and finishing temperature of the martensitic transformation.
Combining Equations (8)–(11), the process of martensite transforming into austenite is obtained as follows:
The process of austenite transitioning to martensite is as follows:
where
and
are constants representing the influence of temperature on the phase transition process, and
and
are also constants representing the influence of stress on the phase transition process.
Assuming martensite transformation is complete at
and austenite transformation is complete at
, the values of the integral constants
,
,
, and
can be determined as follows:
In conclusion, combining with
Figure 6, the Tanaka phase transition dynamics equation is:
3.4. Equations of Robot Kinematics
The caterpillar-inspired soft robot utilizes an electrical power source to induce Joule heating in SMA springs, causing contraction and generating bidirectional tension. This drives the “bipedal” motion of the soft robot, allowing simultaneous inward or outward movement. Additionally, the friction pattern design on the feet generates a frictional difference, thereby propelling the soft robot’s crawling motion.
To better express the crawling process of the soft robot, we make the following assumptions: (1) the strain in the silicone body of the soft robot is finite; (2) during crawling, the sliding friction force is equal to the pressure multiplied by the friction coefficient; (3) we disregard the impact of gravity on the silicone body of the soft robot and the inertial force generated by motion during crawling.
For a better kinematic analysis, the silicone body and SMA spring are considered as a whole, represented by a simplified circular arc with the center of mass at point C. The “bipedal” structure is simplified to two contact points, A and B. Force analysis is conducted for two stages of the soft robot’s crawling motion within one cycle. The force analysis during the crawling process of the soft robot is illustrated in
Figure 7. A Cartesian coordinate system is established, with the crawling direction of the soft robot as the positive
x-axis and the upward direction of the silicone body as the positive
y-axis.
Figure 7a depicts the force diagram when the SMA spring contracts due to heating, and
Figure 7b shows the force diagram when the SMA extends during cooling. In this figure, f
1 and f
2 represent the frictional forces between the soft robot’s feet and the ground, N
1 and N
2 represent the ground support forces, Mg is gravity, and Ma is the net external force.
Due to the conical bristle design on the underside of the feet, when the SMA actuators are powered, the friction coefficients between the front and rear feet of the soft robot are different. Considering the varying friction coefficients, the motion of the soft robot is divided into two stages: contraction and extension of the SMA material. In the second stage, the friction force at point A counteracts the driving force of the SMA spring, while point B continues to move forward under the influence of elastic force. To address this, a moment is introduced when point A is stationary, and point B moves to under the action of elastic force and inertia. Dynamic analyses are conducted for points A and B of the soft robot, where represents stress. The positive pressures at points A and B should be equal, i.e., , where t is time. The friction coefficients between points A and B and the ground are assumed to be and respectively.
Hence, the displacement at Point A is:
Hence, the displacement at Point B is:
We performed kinematic analysis for each of the three stages to obtain the motion states of A, B, and the foot. The results are summarized in
Table 1.
5. Kinematic Model Simulation and Crawling Motion Experiment of Inchworm-Inspired Soft Robot
5.1. Kinematic Simulation of Soft Robot on Simulink
Utilizing the Simulink module in MATLAB software to kinematically model the crawling motion of soft robots, the control block diagram is shown in
Figure 13. Place the various modules from the control block diagram on Simulink for kinematic model simulation. The model is shown in
Figure 14. In this context, I represents current, T represents temperature,
represents martensite volume fraction,
represents strain, X represents SMA spring displacement, and X* indicates the displacement of the soft robot. The controller section of the model employs a PID control approach. Initially, both the I and D terms are set to zero, and the P parameter is assigned a modest value. The system’s response is then observed as the P parameter is incrementally increased until the system begins to diverge or oscillate. At this critical point, the P parameter’s threshold is identified, and K
p is set to 60% of this threshold. Subsequent adjustments are made to the I and D parameters based on the actual system’s dynamic response to determine the three parameters of the PID controller.
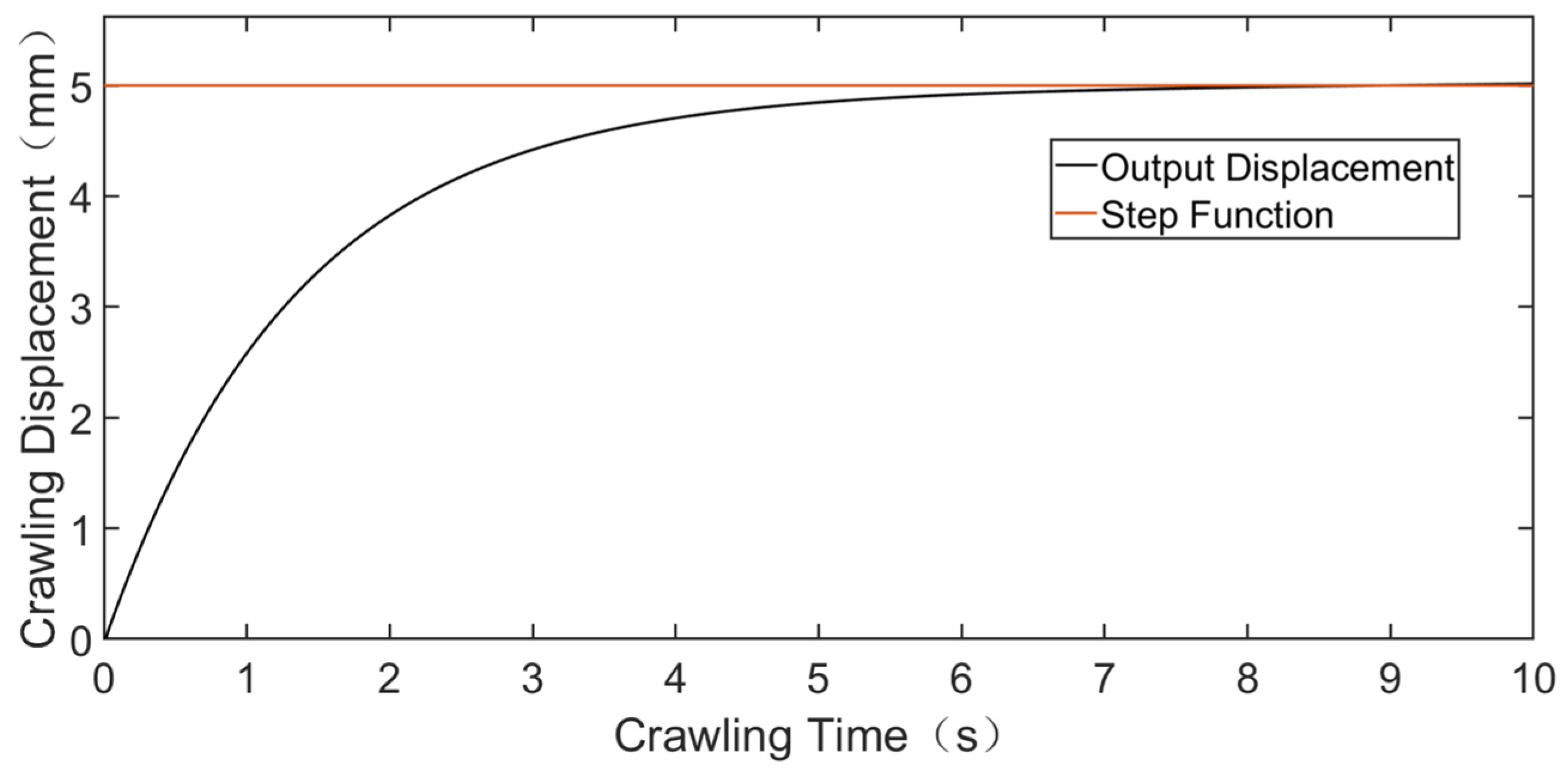
The kinematic model, with the displacement of the soft robot as the controlled variable, includes modules such as the controller, thermodynamic module, and phase transition dynamics module. It describes the relationship between displacement and time for an inchworm-inspired soft robot over one cycle. In practical experiments, it was observed that there is a temperature limit during the transformation between martensite and austenite phases, leading to thermal hysteresis in SMA materials. When the SMA actuator operates, there is a significant cooling time. Therefore, the model undergoes open-loop step response testing and sinusoidal signal testing, with simulation results taken during the operation of the SMA actuator in the cycle. Two-dimensional plots of the results are shown in
Figure 15 and
Figure 16.
Based on the open-loop step response simulation results, with the SMA actuator in operation and a step input signal, the analysis of the soft robot crawling 5 mm reveals that the output displacement reaches stability after approximately 6.5 s of rise time. The overall system overshoot is relatively small. The simulation results validate the effectiveness of the model.
As the controlled output is crawling displacement, the soft robot can only move in one direction. Therefore, a sine signal, representing a quarter of a cycle, is used to test the controller’s effectiveness. During the shape memory process of SMA material, as shown in
Figure 6, the transformation between martensite and austenite occurs under certain temperature conditions, leading to thermal hysteresis in SMA materials during driving. Analyzing the simulation results in
Figure 16, due to the thermal hysteresis and inertia of SMA materials, there is an initial lag in the output displacement. During the crawling motion of the soft robot driven by SMA material, the sinusoidal signal response results show that when the temperature reaches the martensite phase transition condition, the output displacement essentially tracks the desired displacement.
5.2. Crawling Experiment of Soft Robot
The experimental platform for inchworm-inspired soft robot is shown in
Figure 17.
The crawling experiment of the inchworm-inspired soft-bodied robot uses a Mos trigger switch relay module as an electronic switch. A 24V3A DC power supply, along with a 5A constant current and constant voltage buck-boost module, is used to input different constant currents into the soft robot. An Stm32 serves as the upper computer, sending a duty cycle of D and a frequency of 1/T square wave current signal to the relay, thereby controlling the crawling movement of the soft robot.
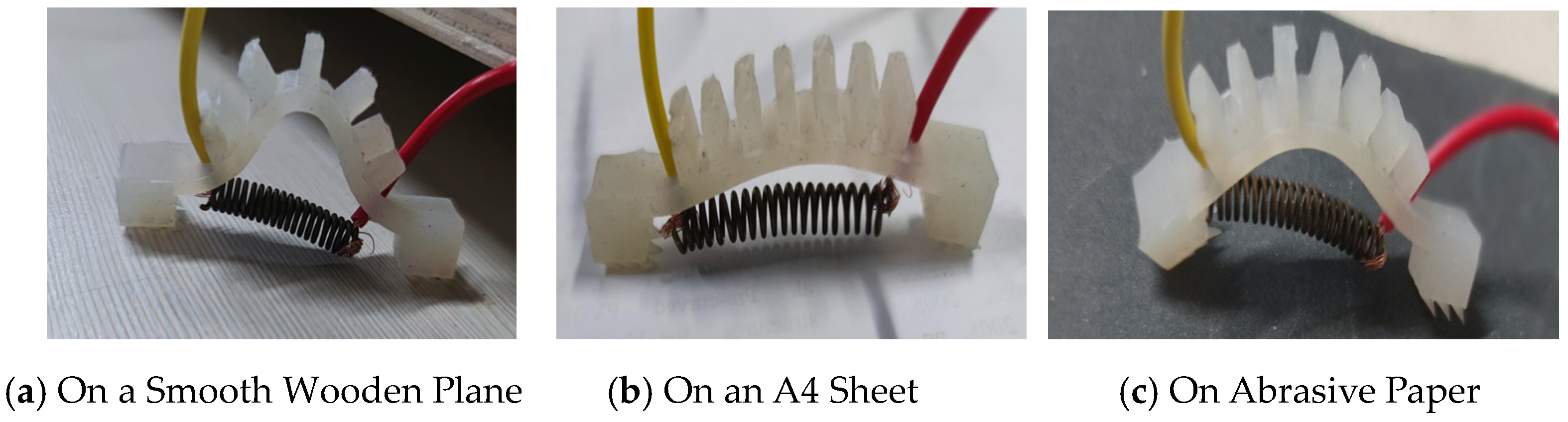
This study experimentally tests the crawling efficiency of the soft robot on different surfaces and with different input currents, as shown in
Figure 18. The tested surfaces include a smooth wooden surface, A4 paper, and rough 130-grit sandpaper. The constant current module is used to adjust the input constant current value, and a ruler and camera are used to record the crawling time and displacement of the soft robot. The study records the crawling behavior of the soft robot over one cycle on different surfaces.
As shown in
Figure 19, the crawling process of the centipede-like soft robot on sandpaper for one cycle is illustrated. The SMA actuator used has a diameter of 6 mm and a wire diameter of 1.0 mm. The power is supplied through a constant current module with an input of 4A constant current and a duty cycle of 0.25. The soft robot is in the state of SMA spring contraction from 0 s to 60 s. At this time, the right foot of the soft robot hardly moves, and the left foot moves from 0 on the ruler to 0.9. From 60 s to 240 s, the left foot will move slightly to scale 1 due to inertia, and the right foot will move from scale 7 to 7.8. The test results indicate that under these conditions, the centipede-like soft robot’s speed of motion for one cycle is 0.041 mm/s, with a displacement of 8.1 mm.
Due to the thermal inertia of SMA materials, it can be observed that the SMA actuator has a very long dissipation time during the driving process. To address the issue of long dissipation time, various heat dissipation methods need to be designed in the future to improve the crawling efficiency of the soft robot. Firstly, the use of small heat sinks, by increasing the surface area for dissipation, can accelerate the dissipation of heat. Secondly, installing temperature sensors on SMA springs and designing a closed-loop feedback control system to monitor and maintain the temperature of the SMA material within a specific phase transition range, ensuring an appropriate working temperature during the shape-changing process, and reducing the process of energy conversion into heat. Thirdly, using low-temperature SMA materials to manufacture SMA actuators, by selecting materials with lower phase transition temperatures, can effectively reduce the amount of energy converted into heat. The combined application of these strategies is expected to significantly shorten the dissipation time of the soft robot and enhance its overall performance.
The simulated caterpillar-type soft robot crawled on wooden surface, A4 paper, and sandpaper, starting from the 0 mark on the ruler. The experiment results were recorded with a camera, and the results were plotted as a curve of crawling displacement over time, as shown in
Figure 20.
The experimental results indicate that when the soft robot is electrically heated with SMA, the hind leg moves forward, and the front leg moves slightly backward, resulting in no crawling displacement. When the SMA is powered off and dissipates heat, the front leg begins to move forward, and crawling displacement begins. After the front leg speed reaches 0, due to the elasticity of the SMA spring and the inertia of the soft robot, the soft robot will still move slightly forward. On the sandpaper surface, the friction between the front and rear legs is greater, resulting in better frictional differences. Therefore, the crawling speed on the frictional surface is faster than on the other two surfaces.
6. Conclusions
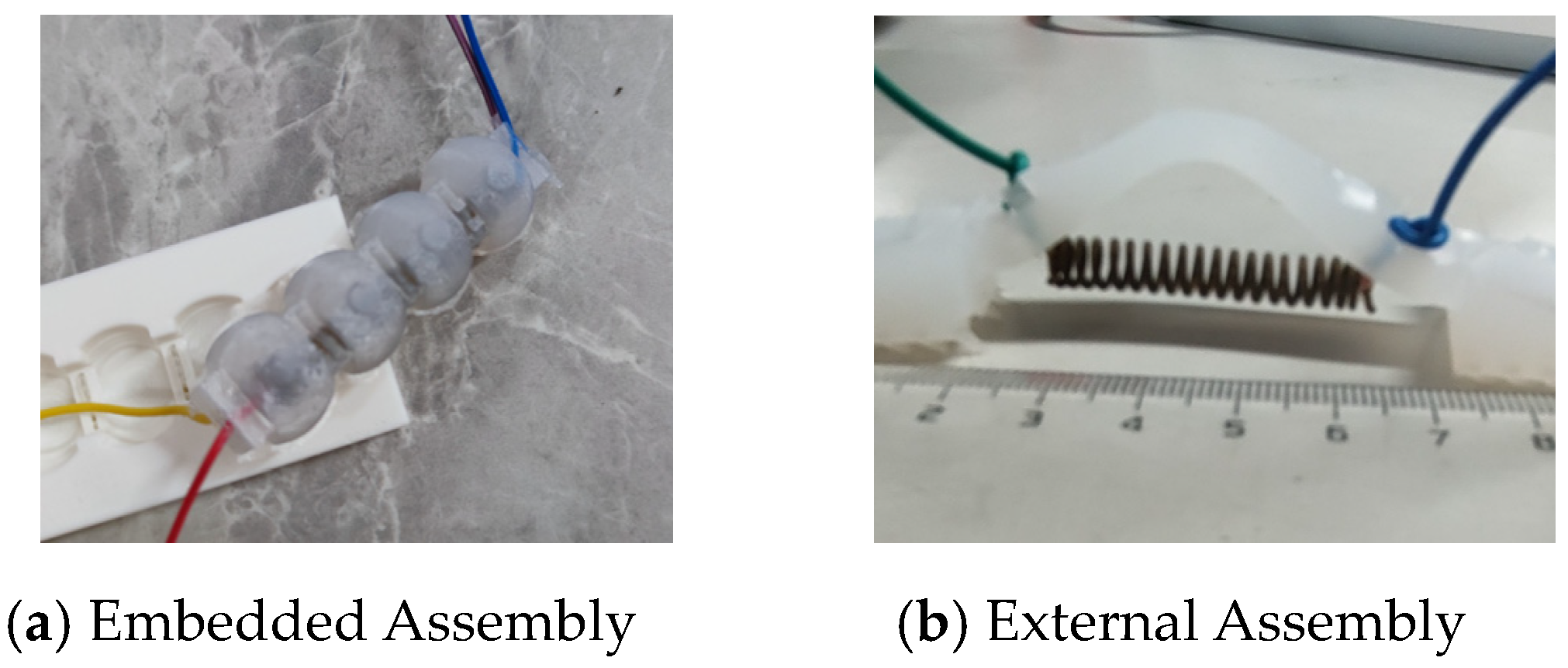
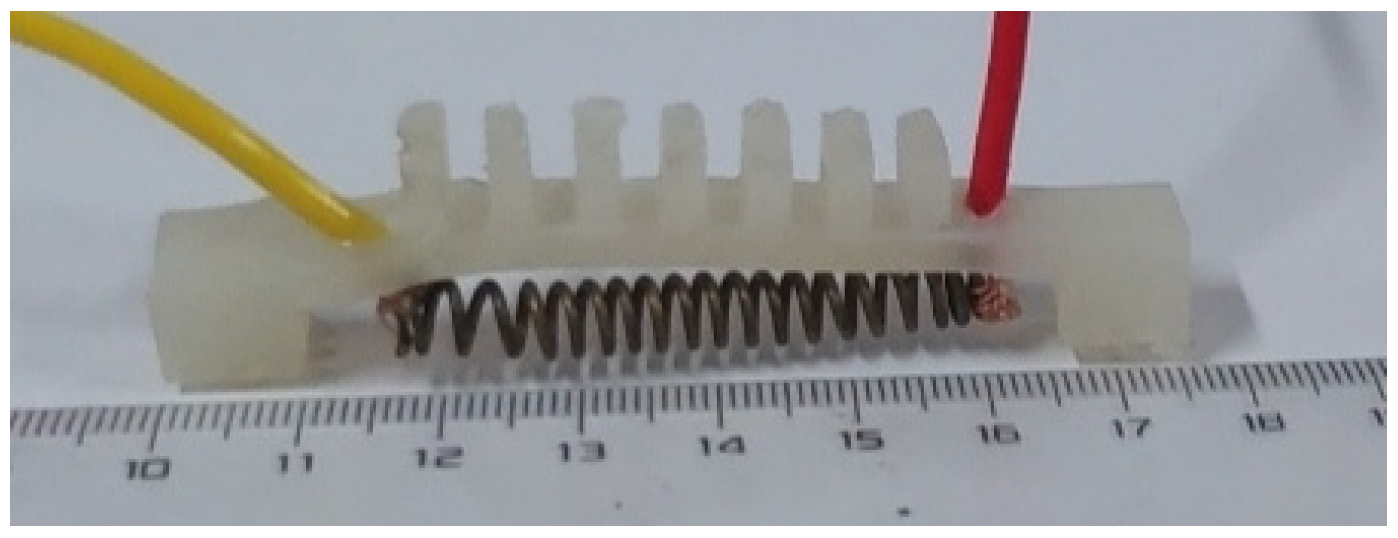
(1) Based on the kinematic mechanism of inchworms, the characteristics of SMA springs are utilized to design an SMA actuator that mimics the “bending” and “contracting” functions of inchworm muscles. Silicone is used as the body of the soft robot, and the feet are designed with conical friction feet to achieve friction differences between the front and rear feet when SMA is powered on, simulating the adhesion function of inchworms. A prototype of the inchworm-inspired soft robot has been prepared.
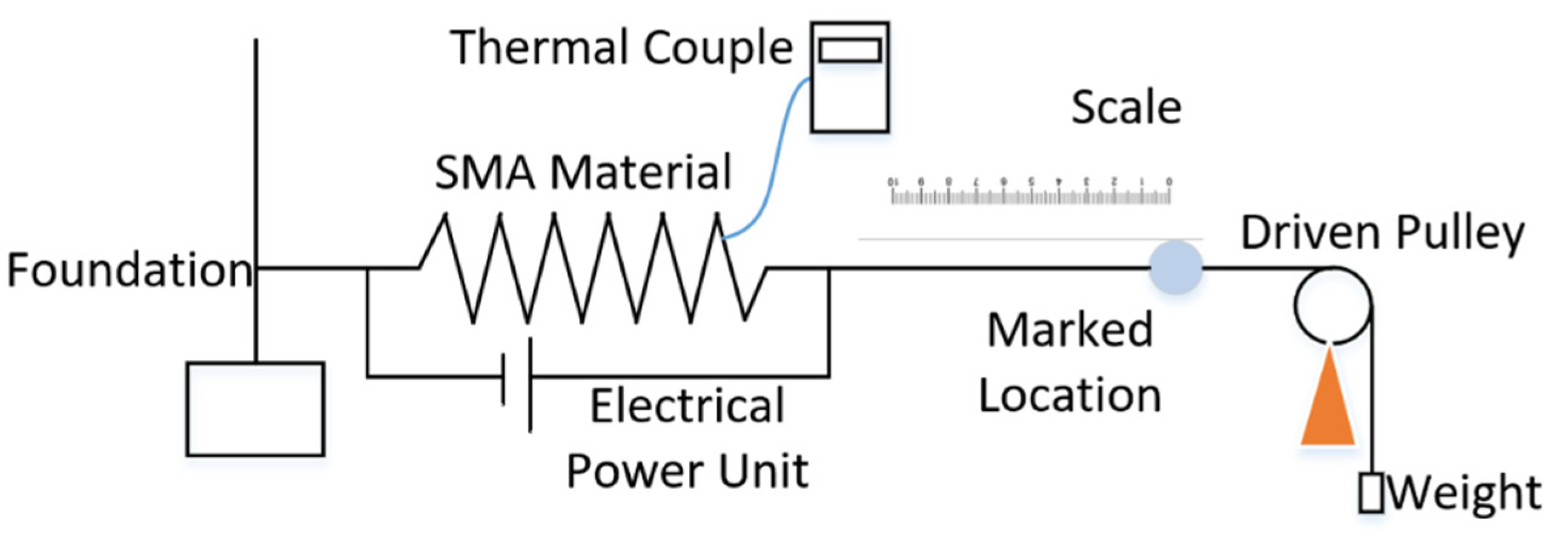
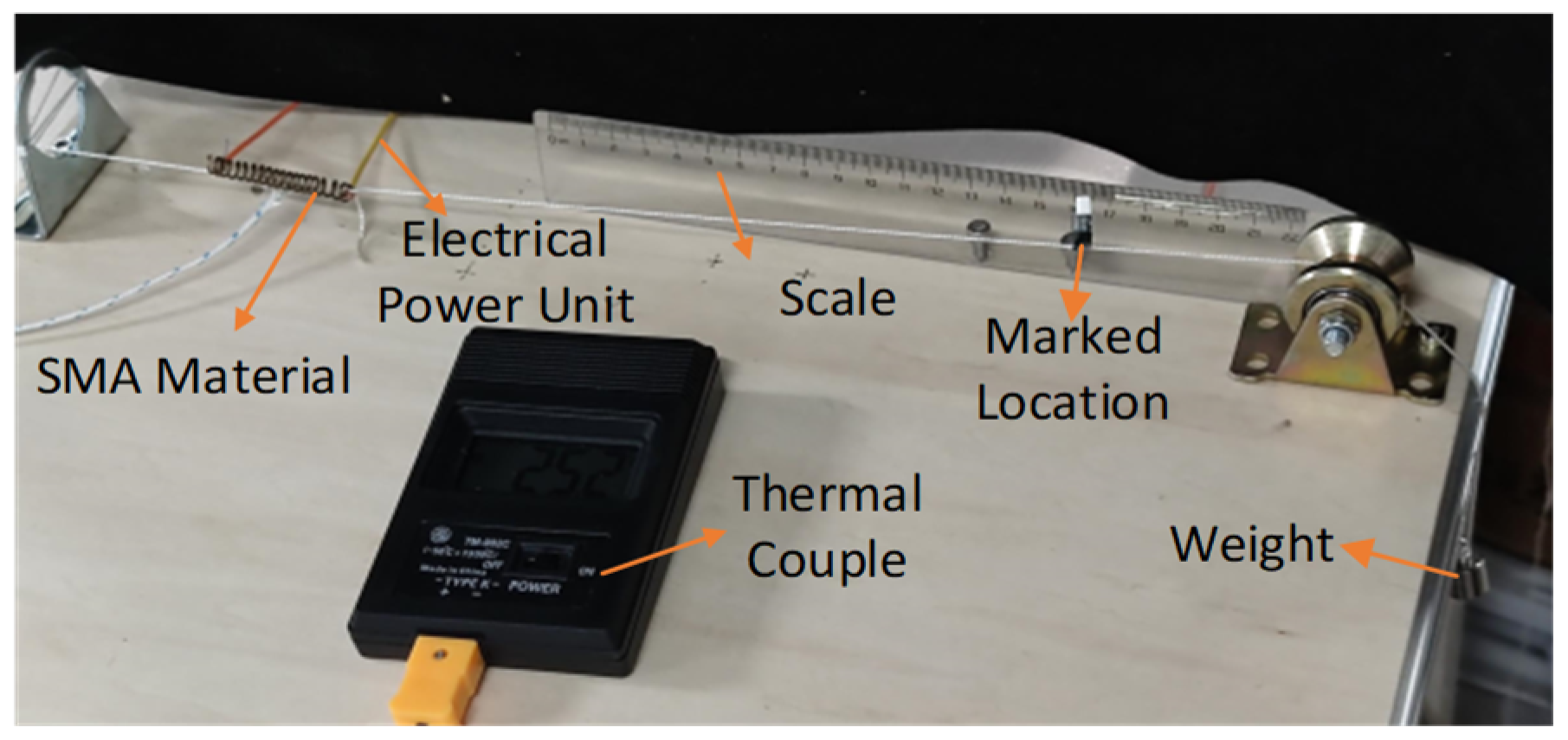
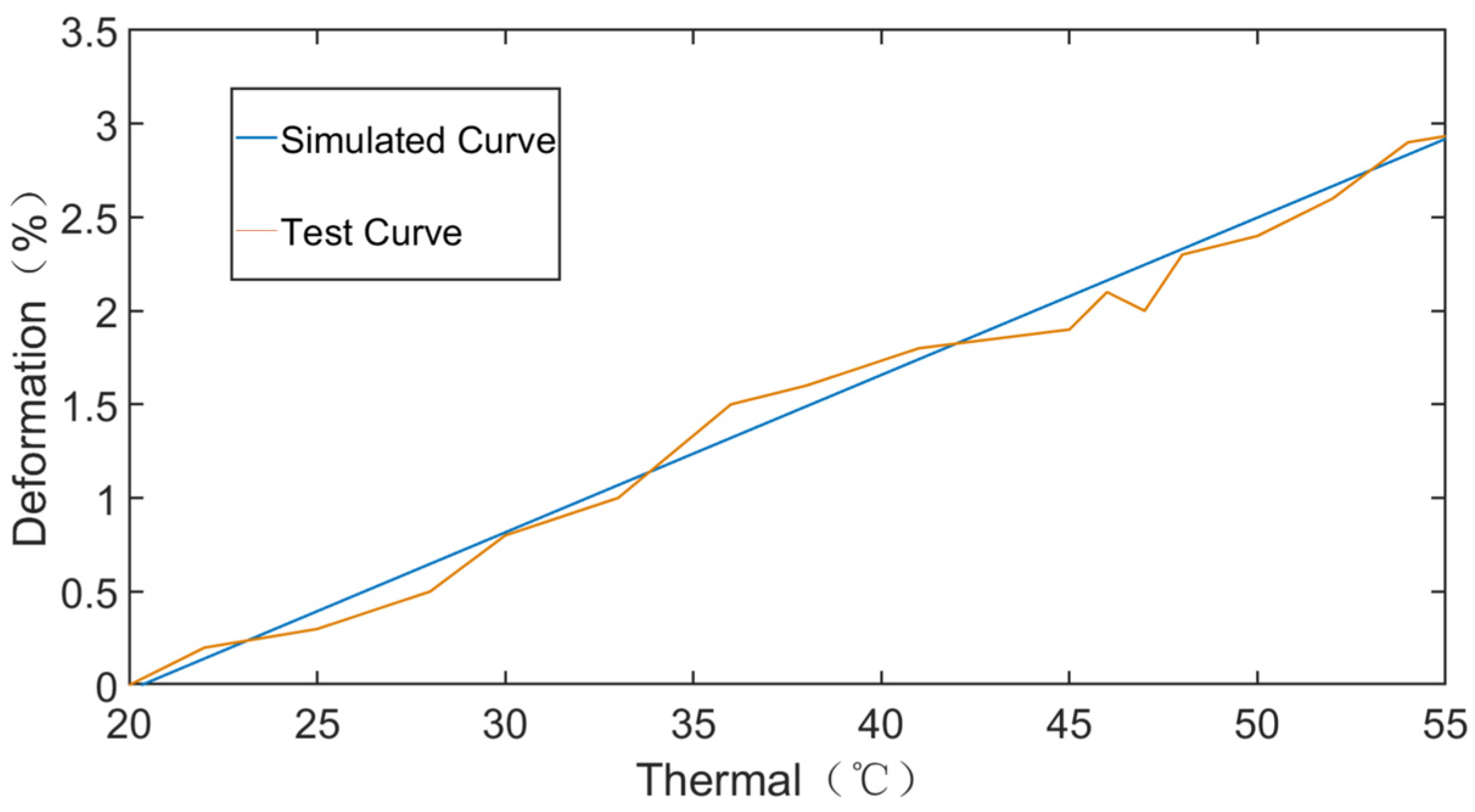
(2) Using the Taylor series, a simplified constitutive model for SMA-driven systems is derived. This model, in comparison to traditional models, avoids parameters such as martensite volume and austenite volume that are difficult to directly measure in the laboratory. The constitutive model directly constructs the relationship between strain, temperature, and stress for the SMA actuator. An experimental platform is set up to solve the undetermined parameters of the simplified constitutive model. Tools such as Origin are used to verify the correctness of the derived constitutive model. The results show that the derived constitutive model is in good agreement with experimental results.
(3) We established a multi-field coupled kinematic model for the inchworm-inspired soft robot considering electrical, thermal, and mechanical aspects. We summarized and derived the thermodynamic equation, constitutive model, phase transition dynamics equation, and kinematic equation for the inchworm-inspired soft robot. We used Simulink to simulate the established model, analyze simulation results, compare them with experimental results, and analyze the motion characteristics of the soft robot.
(4) We established an experimental platform to test the crawling motion of the soft robot on smooth wooden surfaces, A4 paper, and sandpaper. We recorded experimental results with a camera and plot displacement-time curves for different surfaces. We compared these curves with simulation curves and physical facts. The comparison shows a basic conformity to physical laws. Experimental results demonstrate that the soft robot can perform continuous crawling motion. The established kinematic model aligns with the experimental situation, indicating its rationality. This work serves as a reference for future modelling and design of soft crawling robots.
(5) The inchworm-inspired soft-bodied robot designed in this paper was compared with the soft-bodied robots mentioned in the introduction. Due to the use of only SMA springs for propulsion, the size is smaller, conforming to the biological image of the inchworm. The driving part utilizes the smart material SMA, which, compared to other smart materials, can be driven using only a DC power supply and wires, making the control conditions simpler and more manageable. Furthermore, a complete kinematic model is established, laying the foundation for various parameter closed-loop controls for the soft-bodied robot in the future. The construction of a new constitutive model for handling SMA materials provides a reference model for researchers who will use SMA materials as drivers in the future.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}