
Trajectory Re-Planning and Tracking Control for a Tractor–Trailer Mobile Robot Subject to Multiple Constraints


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. System Description
2.2. Preliminaries and Problem Formulation
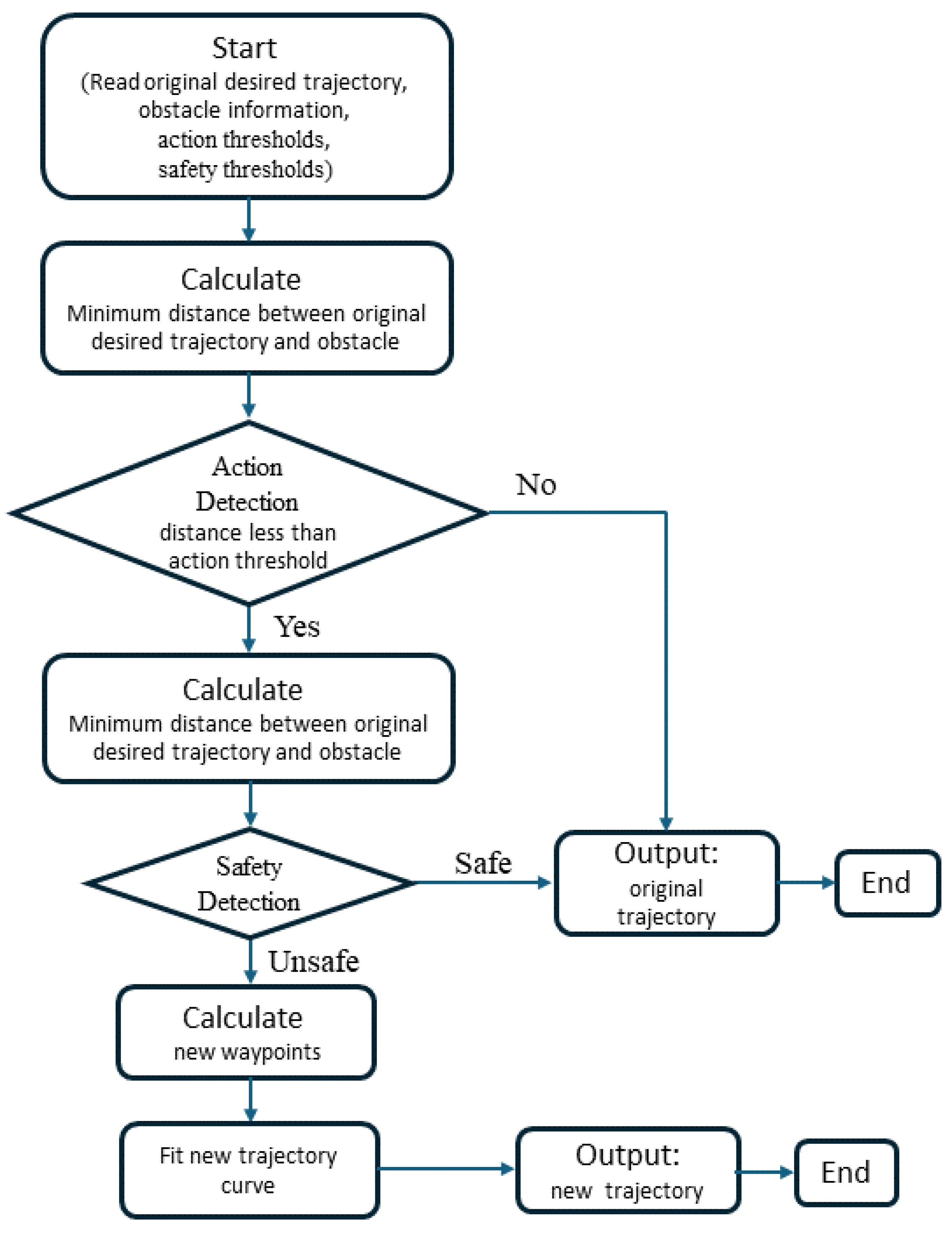
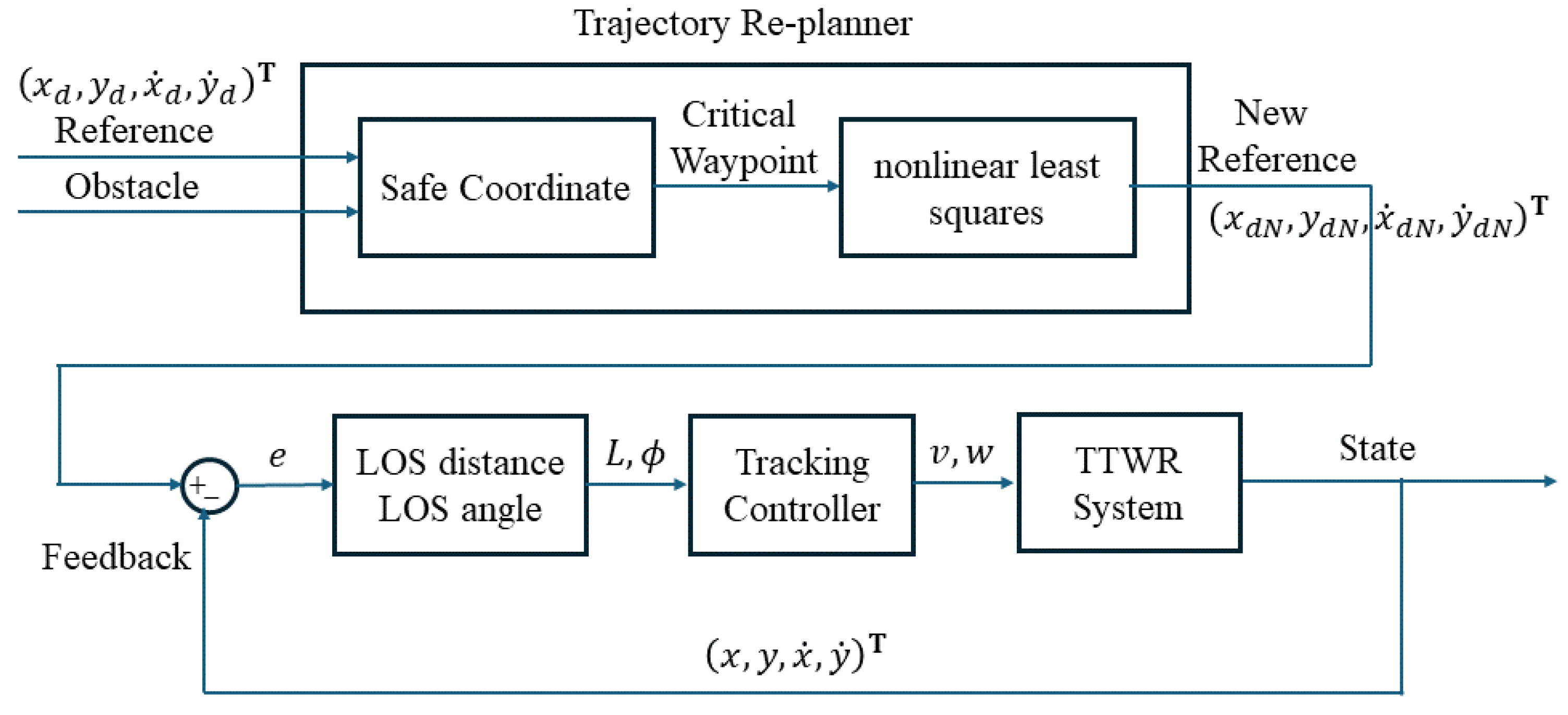
2.3. Trajectory Re-Planning
- Compute the distance L between the robot and the obstacle and evaluate whether L exceeds the movement threshold ;
- If , the robot continues along the pre-set trajectory; conversely, if , record the current time as and estimate the end time , at which the distance between the robot and the obstacle should again surpass .
- Ascertain whether there exists an instance within the interval such that at , the distance falls below the safety threshold .
- Should not exist, re-planning is deemed unnecessary; if is found, initiate re-planning of a new, secure trajectory within the active interval to supplant the original hazardous trajectory.
- Define the movement vector from the position at time to the position at time as the x-axis of a safe coordinate system. Establish the y-axis per the right-hand rule, designating the obstacle’s center as the coordinate origin, as shown in Figure 3.
- Compute the rotation matrix and translation vector that characterize the safe coordinate system in relation to the inertial frame. This computation facilitates the subsequent mapping of positions and velocities at times and into the safe coordinate system, as shown in Figure 4.
- Configure the new trajectory to intersect the point (0, b) within the safe coordinate system, ensuring the y-velocity is zero and adopting the mean x-velocity from times and for the x-velocity, as shown in Figure 4.
- Integrate the data from , and the designated point to construct the new, collision-free trajectory using nonlinear fitting techniques.
- Finally, convert the newly determined trajectory from the safe coordinates back into the inertial coordinates to execute the trajectory in the robot’s operational environment, as shown in Figure 3.
2.4. Control Design
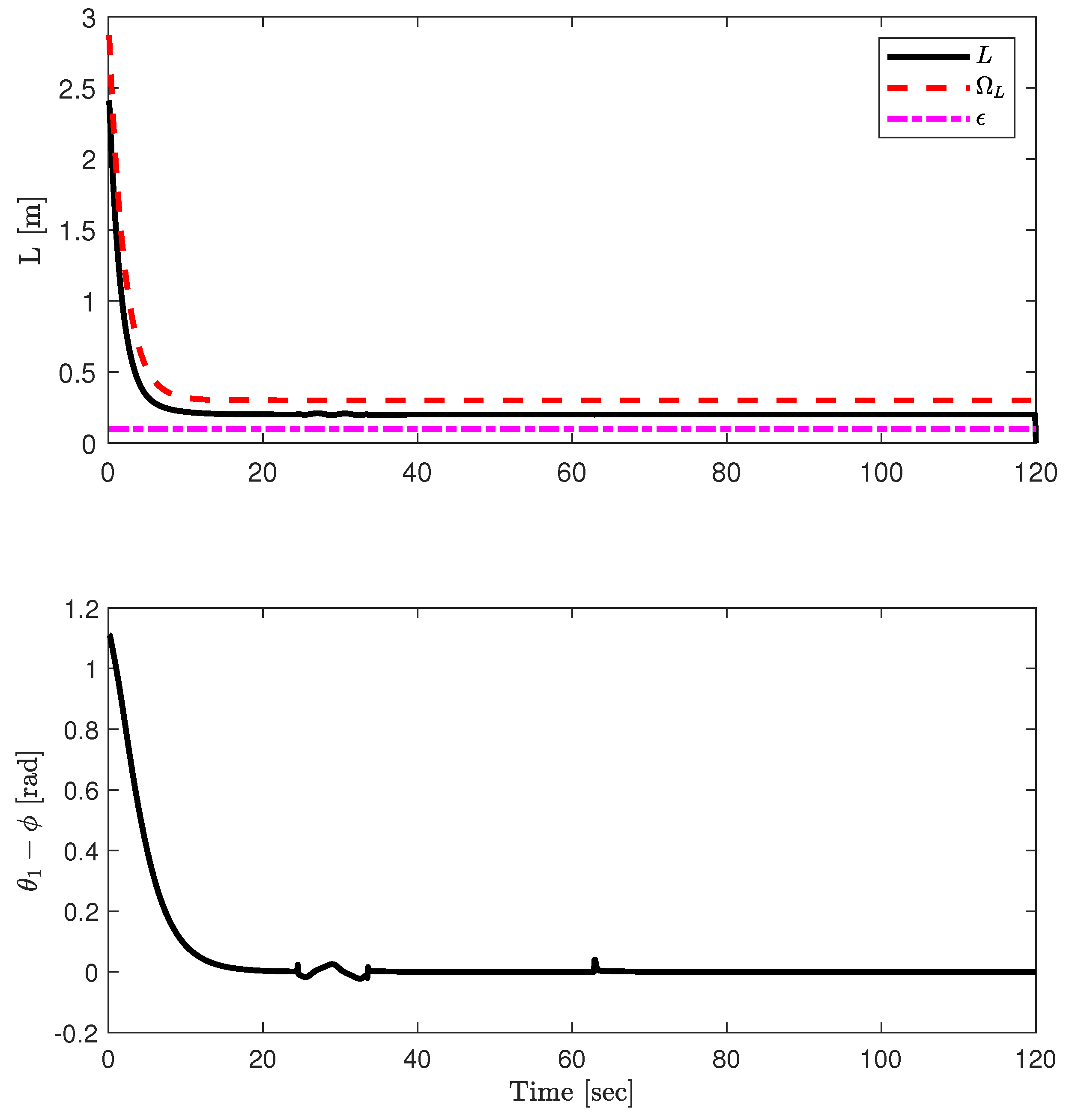
- LOS Distance Tracking Error: The LOS distance tracking error, denoted as , demonstrates exponential convergence towards a small positive boundary , where is an arbitrarily chosen small positive number. This implies that the trailer’s trajectory will approximate the desired trajectory within an arbitrarily small error margin.
- Tractor Angle Convergence: The tractor’s angle, , is guaranteed to converge exponentially towards the LOS angle, , which represents the angular discrepancy between the desired trajectory and the actual position of the tractor. This ensures that the tractor’s orientation is progressively corrected to align the trailer along the desired path.
3. Results
3.1. Trajectory Tracking
3.2. Avoid Obstacles
4. Discussion
- State Feedback and Sensor Noise: Full state feedback requires precise measurements of position, orientation, and velocity, which are susceptible to noise from onboard sensors. The implementation of filtering and sensor fusion techniques is vital for accurate state estimation.
- Actuation Constraints: The control law assumes unrestricted steering angles and velocities, whereas physical robots have inherent limitations. Command inputs must be saturated within practical bounds. Model Predictive Control (MPC) presents a promising solution to such constraint issues. However, these methods often rely on numerical optimization to derive control laws, thus analytical guarantees of stability cannot be ensured.
- Parameter Uncertainty and Disturbances: Fixed model parameters, such as wheel radius and hitch length, are subject to variations in the physical environment, and disturbances like uneven terrain can affect the system behavior. Robust or adaptive control methods could provide compensation for these uncertainties.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| TTWR | Tractor–Trailer Wheeled Robot |
| LOS | line of sight |
| UBF | Universal Barrier Function |
| CBF | Control Barrier Function |
Appendix A
References
- Astolfi, A.; Bolzern, P.; Locatelli, A. Path-tracking of a tractor-trailer vehicle along rectilinear and circular paths: A Lyapunov-based approach. IEEE Trans. Robot. Autom. 2004, 20, 154–160. [Google Scholar] [CrossRef]
- Kassaeiyan, P.; Alipour, K.; Tarvirdizadeh, B. A full-state trajectory tracking controller for tractor-trailer wheeled mobile robots. Mech. Mach. Theory 2020, 150, 103872. [Google Scholar] [CrossRef]
- Yuan, J.; Sun, F.; Huang, Y. Trajectory generation and tracking control for double-steering tractor–trailer mobile robots with on-axle hitching. IEEE Trans. Ind. Electron. 2015, 62, 7665–7677. [Google Scholar] [CrossRef]
- Leng, Z.; Minor, M.A. Curvature-based ground vehicle control of trailer path following considering sideslip and limited steering actuation. IEEE Trans. Intell. Transp. Syst. 2016, 18, 332–348. [Google Scholar] [CrossRef]
- Lashkari, N.; Biglarbegian, M.; Yang, S.X. Backstepping tracking control design for a tractor robot pulling multiple trailers. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 2715–2720. [Google Scholar]
- Elhaki, O.; Shojaei, K. Output-feedback robust saturated actor–critic multi-layer neural network controller for multi-body electrically driven tractors with n-trailer guaranteeing prescribed output constraints. Robot. Auton. Syst. 2022, 154, 104106. [Google Scholar] [CrossRef]
- Elhaki, O.; Shojaei, K. Observer-based neural adaptive control of a platoon of autonomous tractor–trailer vehicles with uncertain dynamics. IET Control. Theory Appl. 2020, 14, 1898–1911. [Google Scholar] [CrossRef]
- Beglini, M.; Lanari, L.; Oriolo, G. Anti-jackknifing control of tractor-trailer vehicles via intrinsically stable MPC. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8806–8812. [Google Scholar]
- Beglini, M.; Belvedere, T.; Lanari, L.; Oriolo, G. An intrinsically stable MPC approach for anti-jackknifing control of tractor-trailer vehicles. IEEE/ASME Trans. Mechatron. 2022, 27, 4417–4428. [Google Scholar] [CrossRef]
- Kassaeiyan, P.; Tarvirdizadeh, B.; Alipour, K. Control of tractor-trailer wheeled robots considering self-collision effect and actuator saturation limitations. Mech. Syst. Signal Process. 2019, 127, 388–411. [Google Scholar] [CrossRef]
- Ezeddin, L.M.H.; Mohmmadion, A. Trajectory tracking weeled mobile robot using backstepping method with connection off axle trailer. Int. J. Smart Electr. Eng. 2018, 7, 177–187. [Google Scholar]
- Jalalnezhad, M.; Fazeli, S.; Bozorgomid, S.; Ghadimi, M. Stability and control of the nonlinear system for tractor with N trailer in the presence of slip. Adv. Mech. Eng. 2021, 13, 16878140211047745. [Google Scholar] [CrossRef]
- Khalaji, A.K.; Moosavian, S.A.A. Robust adaptive controller for a tractor–trailer mobile robot. IEEE/ASME Trans. Mechatron. 2013, 19, 943–953. [Google Scholar] [CrossRef]
- Khalaji, A.K.; Moosavian, S.A.A. Stabilization of a tractor-trailer wheeled robot. J. Mech. Technol. 2016, 30, 421–428. [Google Scholar] [CrossRef]
- Khalaji, A.K.; Jalalnezhad, M. Stabilization of a Tractor with n Trailers in the Presence of Wheel Slip Effects. Robotica 2021, 39, 787–797. [Google Scholar] [CrossRef]
- Van Hau, P.; Nam, D.P.; Ha, N.T.; Thanh, P.T.; Hai, H.T.; Hanh, H.D. Asymptotic stability of the whole tractor-trailer control system. In Proceedings of the 2017 International Conference on System Science and Engineering (ICSSE), Ho Chi Minh City, Vietnam, 21–23 July 2017; pp. 423–427. [Google Scholar]
- Yu, M.; Gong, X.; Fan, G.; Zhang, Y. Trajectory Planning and Tracking for Carrier Aircraft-Tractor System Based on Autonomous and Cooperative Movement. Math. Probl. Eng. 2020, 2020, 6531984. [Google Scholar] [CrossRef]
- Yin, C.; Wang, S.; Li, X.; Yuan, G.; Jiang, C. Trajectory tracking based on adaptive sliding mode control for agricultural tractor. IEEE Access 2020, 8, 113021–113029. [Google Scholar] [CrossRef]
- Kayacan, E.; Kayacan, E.; Ramon, H.; Saeys, W. Nonlinear modeling and identification of an autonomous tractor–trailer system. Comput. Electron. Agric. 2014, 106, 1–10. [Google Scholar] [CrossRef]
- Kim, D.H.; Oh, J.H. Nonlinear tracking control of trailer systems using the Lyapunov direct method. J. Robotic Syst. 1999, 16, 1–8. [Google Scholar] [CrossRef]
- Zhou, B. Lyapunov differential equations and inequalities for stability and stabilization of linear time-varying systems. Automatica 2021, 131, 109785. [Google Scholar] [CrossRef]
- Zhang, K.K.; Zhou, B.; Hou, M.; Duan, G.R. Prescribed-time stabilization of p-normal nonlinear systems by bounded time-varying feedback. Int. J. Robust Nonlinear Control 2022, 32, 421–450. [Google Scholar] [CrossRef]
- Hassan, N.; Saleem, A. Neural network-based adaptive controller for trajectory tracking of wheeled mobile robots. IEEE Access 2022, 10, 13582–13597. [Google Scholar] [CrossRef]
- Xu, P.; Cui, Y.; Shen, Y.; Zhu, W.; Zhang, Y.; Wang, B.; Tang, Q. Reinforcement learning compensated coordination control of multiple mobile manipulators for tight cooperation. Eng. Artif. Intell. 2023, 123, 106281. [Google Scholar] [CrossRef]
- Khanpoor, A.; Khalaji, A.K.; Moosavian, S.A.A. Modeling and control of an underactuated tractor–trailer wheeled mobile robot. Robotica 2017, 35, 2297–2318. [Google Scholar] [CrossRef]
- Naderolasli, A.; Shojaei, K.; Chatraei, A. Leader-follower formation control of Euler–Lagrange systems with limited field-of-view and saturating actuators: A case study for tractor-trailer wheeled mobile robots. Eur. J. Control 2023, 75, 100903. [Google Scholar] [CrossRef]
- Binh, N.T.; Tung, N.A.; Nam, D.P.; Quang, N.H. An adaptive backstepping trajectory tracking control of a tractor trailer wheeled mobile robot. Int. J. Control Autom. Syst. 2019, 17, 465–473. [Google Scholar] [CrossRef]
- Yue, M.; Hou, X.; Gao, R.; Chen, J. Trajectory tracking control for tractor-trailer vehicles: A coordinated control approach. Nonlinear Dyn. 2018, 91, 1061–1074. [Google Scholar] [CrossRef]
- Aro, K.; Urvina, R.; Deniz, N.N.; Menendez, O.; Iqbal, J.; Prado, A. A Nonlinear Model Predictive Controller for Trajectory Planning of Skid-Steer Mobile Robots in Agricultural Environments. In Proceedings of the 2023 IEEE Conference on AgriFood Electronics (CAFE), Torino, Italy, 25–27 September 2023; pp. 65–69. [Google Scholar]
- Jin, X.; Dai, S.L.; Liang, J.; Guo, D.; Tan, H. Constrained line-of-sight tracking control of a tractor-trailer mobile robot system with multiple constraints. In Proceedings of the 2021 American Control Conference (ACC), New Orleans, LA, USA, 25–28 May 2021; pp. 1046–1051. [Google Scholar]
- Jin, X.; Liang, J.; Dai, S.L.; Guo, D. Adaptive Line-of-Sight tracking control for a tractor-trailer vehicle system with multiple constraints. IEEE Trans. Intell. Transp. 2021, 23, 11349–11360. [Google Scholar] [CrossRef]
- Jin, X.; Dai, S.L.; Liang, J. Adaptive constrained formation-tracking control for a tractor-trailer mobile robot team with multiple constraints. IEEE Trans. Autom. Control 2022, 68, 1700–1707. [Google Scholar] [CrossRef]
- Shkel, A.M.; Lumelsky, V. Classification of the Dubins set. Robot. Auton. Syst. 2001, 34, 179–202. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, T.; Li, P.; Yuan, Y.; Zhang, L.; Zhao, Y. Trajectory Re-Planning and Tracking Control for a Tractor–Trailer Mobile Robot Subject to Multiple Constraints. Actuators 2024, 13, 109. https://doi.org/10.3390/act13030109
Zhao T, Li P, Yuan Y, Zhang L, Zhao Y. Trajectory Re-Planning and Tracking Control for a Tractor–Trailer Mobile Robot Subject to Multiple Constraints. Actuators. 2024; 13(3):109. https://doi.org/10.3390/act13030109
Chicago/Turabian StyleZhao, Tianrui, Peibo Li, Yu Yuan, Lin Zhang, and Yanzheng Zhao. 2024. "Trajectory Re-Planning and Tracking Control for a Tractor–Trailer Mobile Robot Subject to Multiple Constraints" Actuators 13, no. 3: 109. https://doi.org/10.3390/act13030109
APA StyleZhao, T., Li, P., Yuan, Y., Zhang, L., & Zhao, Y. (2024). Trajectory Re-Planning and Tracking Control for a Tractor–Trailer Mobile Robot Subject to Multiple Constraints. Actuators, 13(3), 109. https://doi.org/10.3390/act13030109