
Design and Characterization of Soft Fabric Omnidirectional Bending Actuators
Abstract
:1. Introduction
2. Robot Design and Fabrication
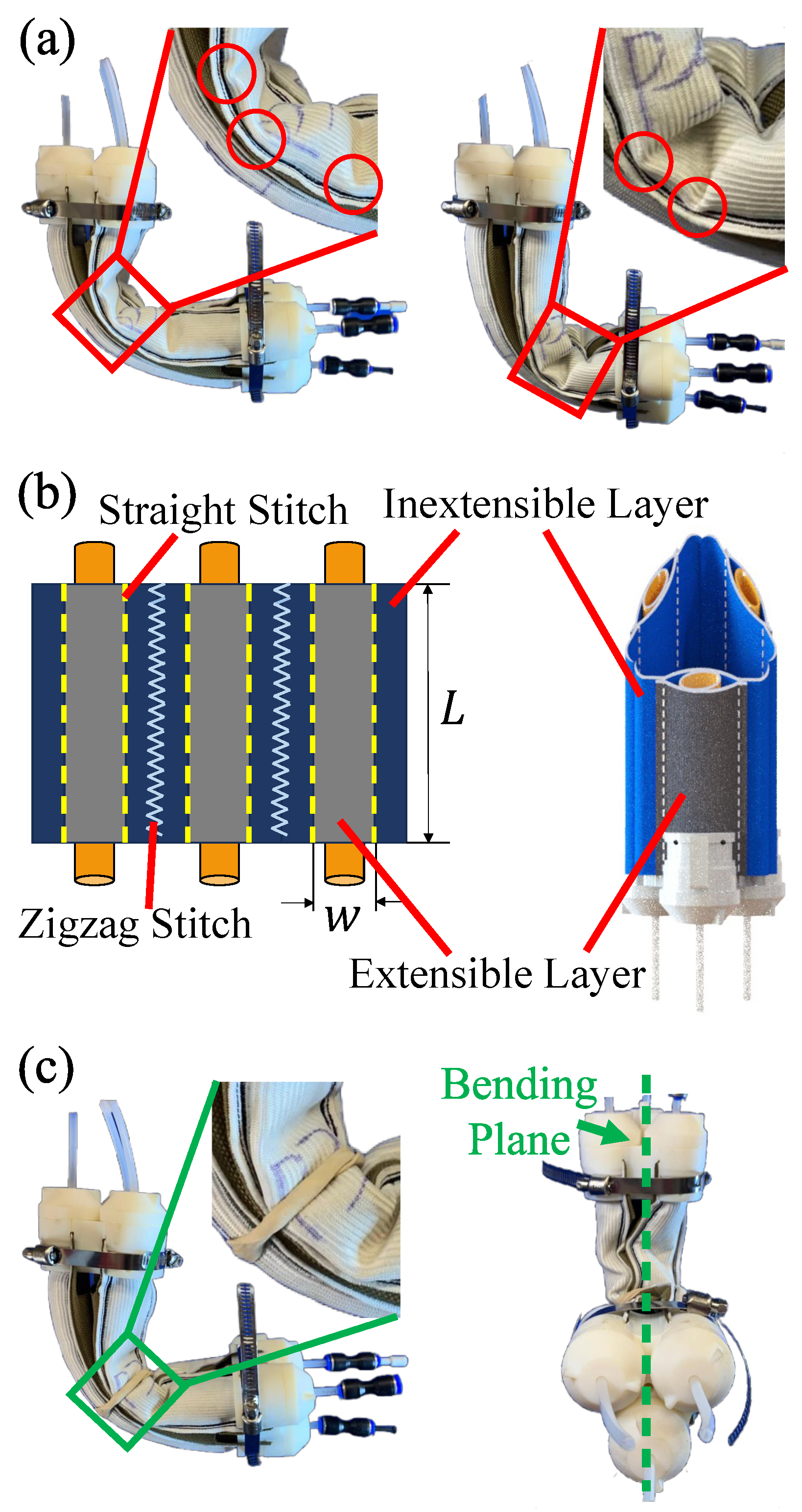
2.1. Design Considerations
2.2. Fabrication and Integration
3. Experimental Characterizations and Demonstrations
3.1. Experimental Setup
3.2. Load-Free Workspace Measurement
3.3. Force Output Measurement
3.4. Stiffness Modulation
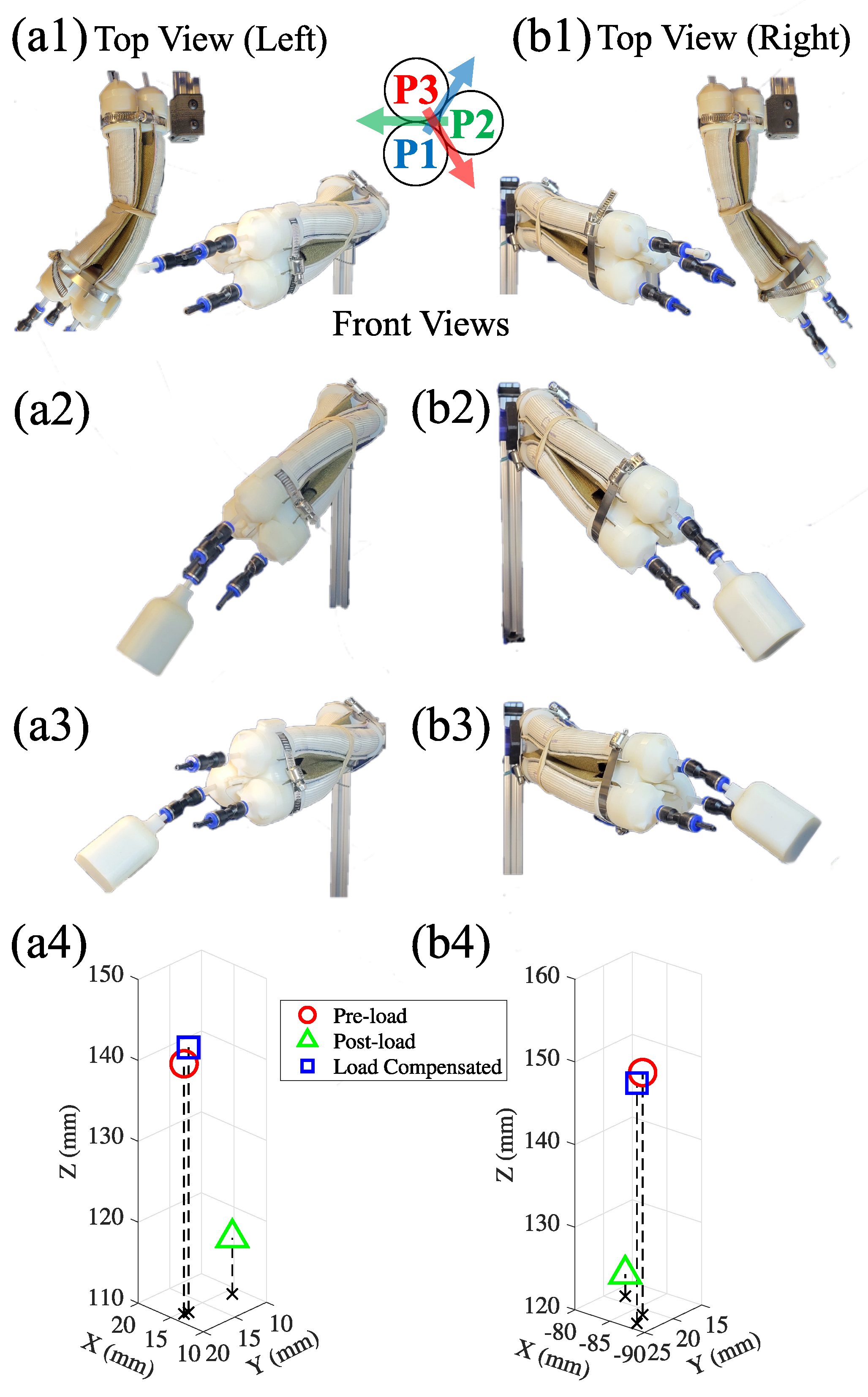
3.5. Out-of-Plane Deformation Compensation
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| OBA | Omnidirectional Bending Actuator |
| PAM | Pneumatic artificial muscle |
| DoF | Degree of freedom |
| EM | Electromagnetic |
| RoM | Range of motion |
References
- Simpson, C.S.; Okamura, A.M.; Hawkes, E.W. Exomuscle: An inflatable device for shoulder abduction support. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6651–6657. [Google Scholar] [CrossRef]
- Yap, H.K.; Khin, P.M.; Koh, T.H.; Sun, Y.; Liang, X.; Lim, J.H.; Yeow, C.H. A Fully Fabric-Based Bidirectional Soft Robotic Glove for Assistance and Rehabilitation of Hand Impaired Patients. IEEE Robot. Autom. Lett. 2017, 2, 1383–1390. [Google Scholar] [CrossRef]
- Jarrassé, N.; Morel, G. Connecting a human limb to an exoskeleton. IEEE Trans. Robot. 2011, 28, 697–709. [Google Scholar] [CrossRef]
- Galiana, I.; Hammond, F.L.; Howe, R.D.; Popovic, M.B. Wearable soft robotic device for post-stroke shoulder rehabilitation: Identifying misalignments. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 317–322. [Google Scholar] [CrossRef]
- Xavier, M.S.; Tawk, C.D.; Zolfagharian, A.; Pinskier, J.; Howard, D.; Young, T.; Lai, J.; Harrison, S.M.; Yong, Y.K.; Bodaghi, M.; et al. Soft Pneumatic Actuators: A Review of Design, Fabrication, Modeling, Sensing, Control and Applications. IEEE Access 2022, 10, 59442–59485. [Google Scholar] [CrossRef]
- Hawkes, E.W.; Blumenschein, L.H.; Greer, J.D.; Okamura, A.M. A soft robot that navigates its environment through growth. Sci. Robot. 2017, 2, eaan3028. [Google Scholar] [CrossRef] [PubMed]
- Liu, Z.; Lu, Z.; Karydis, K. SoRX: A Soft Pneumatic Hexapedal Robot to Traverse Rough, Steep, and Unstable Terrain. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 420–426. [Google Scholar] [CrossRef]
- Laut, J.; Porfiri, M.; Raghavan, P. The present and future of robotic technology in rehabilitation. Curr. Phys. Med. Rehabil. Rep. 2016, 4, 312–319. [Google Scholar] [CrossRef] [PubMed]
- Schiele, A.; van der Helm, F.C.T. Influence of attachment pressure and kinematic configuration on pHRI with wearable robots. Appl. Bionics Biomech. 2009, 6, 157–173. [Google Scholar] [CrossRef]
- O’Neill, C.T.; Phipps, N.S.; Cappello, L.; Paganoni, S.; Walsh, C.J. A soft wearable robot for the shoulder: Design, characterization, and preliminary testing. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 1672–1678. [Google Scholar] [CrossRef]
- Coyle, S.; Majidi, C.; LeDuc, P.; Hsia, K.J. Bio-inspired soft robotics: Material selection, actuation, and design. Extrem. Mech. Lett. 2018, 22, 51–59. [Google Scholar] [CrossRef]
- Nguyen, P.H.; Zhang, W. Design and Computational Modeling of Fabric Soft Pneumatic Actuators for Wearable Assistive Devices. Sci. Rep. 2020, 10, 9638. [Google Scholar] [CrossRef]
- Zhang, J.; Sheng, J.; O’Neill, C.T.; Walsh, C.J.; Wood, R.J.; Ryu, J.H.; Desai, J.P.; Yip, M.C. Robotic Artificial Muscles: Current Progress and Future Perspectives. IEEE Trans. Robot. 2019, 35, 761–781. [Google Scholar] [CrossRef]
- Thalman, C.; Artemiadis, P. A review of soft wearable robots that provide active assistance: Trends, common actuation methods, fabrication, and applications. Wearable Technol. 2020, 1, e3. [Google Scholar] [CrossRef]
- Wehner, M.; Quinlivan, B.; Aubin, P.M.; Martinez-Villalpando, E.; Baumann, M.; Stirling, L.; Holt, K.; Wood, R.; Walsh, C. A lightweight soft exosuit for gait assistance. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3362–3369. [Google Scholar] [CrossRef]
- Teng, C.; Wong, Z.; Teh, W.; Chong, Y.Z. Design and development of inexpensive pneumatically-powered assisted knee-ankle-foot orthosis for gait rehabilitation-preliminary finding. In Proceedings of the 2012 International Conference on Biomedical Engineering (ICoBE), Penang, Malaysia, 27–28 February 2012; pp. 28–32. [Google Scholar] [CrossRef]
- Davis, S.; Tsagarakis, N.; Canderle, J.; Caldwell, D.G. Enhanced Modelling and Performance in Braided Pneumatic Muscle Actuators. Int. J. Robot. Res. 2003, 22, 213–227. [Google Scholar] [CrossRef]
- Wang, J.; Fei, Y.; Pang, W. Design, modeling, and testing of a soft pneumatic glove with segmented PneuNets bending actuators. IEEE/ASME Trans. Mechatron. 2019, 24, 990–1001. [Google Scholar] [CrossRef]
- Polygerinos, P.; Wang, Z.; Galloway, K.C.; Wood, R.J.; Walsh, C.J. Soft robotic glove for combined assistance and at-home rehabilitation. Rob. Auton. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef]
- Oguntosin, V.; Harwin, W.S.; Kawamura, S.; Nasuto, S.J.; Hayashi, Y. Development of a wearable assistive soft robotic device for elbow rehabilitation. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015; pp. 747–752. [Google Scholar] [CrossRef]
- Connolly, F.; Wagner, D.A.; Walsh, C.J.; Bertoldi, K. Sew-free anisotropic textile composites for rapid design and manufacturing of soft wearable robots. Extrem. Mech. Lett. 2019, 27, 52–58. [Google Scholar] [CrossRef]
- Cappello, L.; Meyer, J.T.; Galloway, K.C.; Peisner, J.D.; Granberry, R.; Wagner, D.A.; Engelhardt, S.; Paganoni, S.; Walsh, C.J. Assisting hand function after spinal cord injury with a fabric-based soft robotic glove. J. Neuroeng. Rehabil. 2018, 15, 59. [Google Scholar] [CrossRef] [PubMed]
- Chung, J.; Heimgartner, R.; Oneill, C.T.; Phipps, N.S.; Walsh, C.J. ExoBoot, a Soft Inflatable Robotic Boot to Assist Ankle During Walking: Design, Characterization and Preliminary Tests. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 509–516. [Google Scholar] [CrossRef]
- Yang, H.D.; Asbeck, A.T. A New Manufacturing Process for Soft Robots and Soft/Rigid Hybrid Robots. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 8039–8046. [Google Scholar] [CrossRef]
- Realmuto, J.; Sanger, T. A robotic forearm orthosis using soft fabric-based helical actuators. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019; pp. 591–596. [Google Scholar] [CrossRef]
- Connelly, L.; Jia, Y.; Toro, M.L.; Stoykov, M.E.; Kenyon, R.V.; Kamper, D.G. A Pneumatic Glove and Immersive Virtual Reality Environment for Hand Rehabilitative Training After Stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2010, 18, 551–559. [Google Scholar] [CrossRef] [PubMed]
- Cappello, L.; Galloway, K.C.; Sanan, S.; Wagner, D.A.; Granberry, R.; Engelhardt, S.; Haufe, F.L.; Peisner, J.D.; Walsh, C.J. Exploiting Textile Mechanical Anisotropy for Fabric-Based Pneumatic Actuators. Soft Robot. 2018, 5, 662–674. [Google Scholar] [CrossRef] [PubMed]
- Park, S.H.; Yi, J.; Kim, D.; Lee, Y.; Koo, H.S.; Park, Y.L. A Lightweight, Soft Wearable Sleeve for Rehabilitation of Forearm Pronation and Supination. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019; pp. 636–641. [Google Scholar] [CrossRef]
- Ezzibdeh, R.; Arora, P.; Amanatullah, D.F. Utilization of a pneumatic exoskeleton after total knee arthroplasty. Arthroplast. Today 2019, 5, 314–315. [Google Scholar] [CrossRef] [PubMed]
- Fraiszudeen, A.; Yeow, C.H. Soft Actuating Sit-to-Stand Trainer Seat. J. Mech. Robot. 2019, 11, 014501. [Google Scholar] [CrossRef]
- Koh, T.H.; Cheng, N.; Yap, H.K.; Yeow, C.H. Design of a Soft Robotic Elbow Sleeve with Passive and Intent-Controlled Actuation. Front. Neurosci. 2017, 11, 597. [Google Scholar] [CrossRef] [PubMed]
- Abrar, T.; Putzu, F.; Konstantinova, J.; Althoefer, K. EPAM: Eversive Pneumatic Artificial Muscle. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019; pp. 19–24. [Google Scholar] [CrossRef]
- Nguyen, P.H.; Mohd, I.B.I.; Sparks, C.; Arellano, F.L.; Zhang, W.; Polygerinos, P. Fabric Soft Poly-Limbs for Physical Assistance of Daily Living Tasks. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 8429–8435. [Google Scholar] [CrossRef]
- Nguyen, P.H.; Qiao, Z.; Seidel, S.; Amatya, S.; Mohd, I.I.B.; Zhang, W. Towards an Untethered Knit Fabric Soft Continuum Robotic Module with Embedded Fabric Sensing. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 615–620. [Google Scholar] [CrossRef]
- Ma, J.; Chen, D.; Liu, Z.; Wei, J.; Zhang, X.; Zeng, Z.; Jiang, Y. All-Fabric Bi-directional Actuators for Multi-joint Assistance of Upper Limb. J. Bionic Eng. 2023, 20, 2661–2669. [Google Scholar] [CrossRef]
- Natividad, R.F.; Miller-Jackson, T.; Chen-Hua, R.Y. A 2-DOF Shoulder Exosuit Driven by Modular, Pneumatic, Fabric Actuators. IEEE Trans. Med. Robot. Bionics 2021, 3, 166–178. [Google Scholar] [CrossRef]
- Liang, X.; Yap, H.K.; Guo, J.; Yeow, R.C.H.; Sun, Y.; Chui, C.K. Design and characterization of a novel fabric-based robotic arm for future wearable robot application. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, Macao, 5–8 December 2017; pp. 367–372. [Google Scholar] [CrossRef]
- Thalman, C.M.; Lam, Q.P.; Nguyen, P.H.; Sridar, S.; Polygerinos, P. A Novel Soft Elbow Exosuit to Supplement Bicep Lifting Capacity. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 6965–6971. [Google Scholar] [CrossRef]
- Sovero, S.; Talele, N.; Smith, C.; Cox, N.; Swift, T.; Byl, K. Initial Data and Theory for a High Specific-Power Ankle Exoskeleton Device. In Proceedings of the 2016 International Symposium on Experimental Robotics, ISER, Nagasaki, Japan, 3–8 October 2016; Springer: Cham, Switzerland, 2017; pp. 355–364. [Google Scholar] [CrossRef]
- Park, Y.L.; Rong Chen, B.; Pérez-Arancibia, N.O.; Young, D.; Stirling, L.; Wood, R.J.; Goldfield, E.C.; Nagpal, R. Design and control of a bio-inspired soft wearable robotic device for ankle–foot rehabilitation. Bioinspiration Biomim. 2014, 9, 016007. [Google Scholar] [CrossRef] [PubMed]
- Zhu, M.; Adams, W.; Polygerinos, P. Carpal Tunnel Syndrome Soft Relief Device for Typing Applications. In Proceedings of the 2017 Design of Medical Devices Conference, Minneapolis, MN, USA, 10–13 April 2017; p. V001T03A003. [Google Scholar] [CrossRef]
- Sanan, S.; Lynn, P.S.; Griffith, S.T. Pneumatic Torsional Actuators for Inflatable Robots. J. Mech. Robot. 2014, 6, 031003. [Google Scholar] [CrossRef]
- Nishioka, Y.; Uesu, M.; Tsuboi, H.; Kawamura, S.; Masuda, W.; Yasuda, T.; Yamano, M. Development of a pneumatic soft actuator with pleated inflatable structures. Adv. Robot. 2017, 31, 753–762. [Google Scholar] [CrossRef]
- Govin, D.; Saenz, L.; Athanasaki, G.; Snyder, L.; Polygerinos, P. Design and Development of a Soft Robotic Back Orthosis. In Proceedings of the 2018 Design of Medical Devices Conference, Minneapolis, MN, USA, 9–12 April 2018. [Google Scholar] [CrossRef]
- Natividad, R.F.; Hong, S.W.; Miller-Jackson, T.M.; Yeow, C.H. The Exosleeve: A Soft Robotic Exoskeleton for Assisting in Activities of Daily Living. In Wearable Robotics: Challenges and Trends, WeRob 2018, Biosystems & Biorobotics; Springer: Cham, Switzerland, 2019; pp. 406–409. [Google Scholar] [CrossRef]
- Liu, T.; Abrar, T.; Realmuto, J. Modular and Reconfigurable Body Mounted Soft Robots. In Proceedings of the 2024 7th IEEE-RAS International Conference on Soft Robotics (RoboSoft), San Diego, CA, USA, 14–17 April 2024. [Google Scholar]
- Ariga, Y.; Pham, H.T.T.; Uemura, M.; Hirai, H.; Miyazaki, F. Novel equilibrium-point control of agonist-antagonist system with pneumatic artificial muscles. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 1470–1475. [Google Scholar]
- Ariga, Y.; Maeda, D.; Pham, H.T.T.; Uemura, M.; Hirai, H.; Miyazaki, F. Novel equilibrium-point control of agonist-antagonist system with pneumatic artificial muscles: II. Application to EMG-based human-machine interface for an elbow-joint system. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 4380–4385. [Google Scholar]
- Tassa, Y.; Wu, T.; Movellan, J.; Todorov, E. Modeling and identification of pneumatic actuators. In Proceedings of the 2013 IEEE International Conference on Mechatronics and Automation, Takamatsu, Japan, 4–7 August 2013; pp. 437–443. [Google Scholar] [CrossRef]
- Guo, X.; Li, W.; Zhang, W. Adjustable stiffness elastic composite soft actuator for fast-moving robots. Sci. China Technol. Sci. 2021, 64, 1663–1675. [Google Scholar] [CrossRef]
- Ma, Z.; Sameoto, D. A Review of Electrically Driven Soft Actuators for Soft Robotics. Micromachines 2022, 13, 1881. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Direction/State | Position (X, Y, Z) mm | Pressure (P1, P2, P3) kPa |
|---|---|---|
| Left/Pre-load | (14.5, 18.4, 140.9) ± 0.15 | (207, 0, 207) |
| Left/Post-load | (14.1, 11.2, 117.0) ± 0.42 | (207, 0, 207) |
| Left/Compensated | (14.5, 17.7, 142.7) ± 0.15 | (338, 0, 103) |
| Right/Pre-load | (, 21.3, 149.3) ± 0.11 | (103, 207, 0) |
| Right/Post-load | (, 18.5, 122.6) ± 0.37 | (103, 207, 0) |
| Right/Compensated | (, 23.6, 149.1) ± 0.44 | (276, 290, 0) |
| Property | OBA | Soft Continuum Robotic Module [34] | fSPL [33] |
|---|---|---|---|
| Material | Knit fabric | Knit fabric | Woven fabric |
| Fabrication Tools | Sewing machine, 3D printer | Laser cutter, Heat press, Sewing machine, 3D printer | Laser cutter, CNC router, Sewing machine, 3D printer |
| Single-Chamber Mass | 22 g | 30 g | 364 g |
| Actuator Mass | 278 g | 400 g | 1092 g |
| Actuator Length | 229 mm | 200 mm | 590 mm |
| Actuator Diameter | 68 mm | 120 mm | 100 mm |
| Angular RoM | 90.80° | 104.02° | 180° |
| Max Pressure | 862 kPa | 690 kPa | 540 kPa |
| Bending Payload | 10.99 N (414 kPa) | 9.66 N (207 kPa) | 14.91 N (345 kPa) |
| Force-to-weight Ratio | 39.53 N/kg | 24.15 N/kg | 13.65 N/kg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.; Bayarsaikhan, K.; Aguilar, G.; Realmuto, J.; Sheng, J. Design and Characterization of Soft Fabric Omnidirectional Bending Actuators. Actuators 2024, 13, 112. https://doi.org/10.3390/act13030112
Lee K, Bayarsaikhan K, Aguilar G, Realmuto J, Sheng J. Design and Characterization of Soft Fabric Omnidirectional Bending Actuators. Actuators. 2024; 13(3):112. https://doi.org/10.3390/act13030112
Chicago/Turabian StyleLee, Kyungjoon, Khulan Bayarsaikhan, Gabriel Aguilar, Jonathan Realmuto, and Jun Sheng. 2024. "Design and Characterization of Soft Fabric Omnidirectional Bending Actuators" Actuators 13, no. 3: 112. https://doi.org/10.3390/act13030112
APA StyleLee, K., Bayarsaikhan, K., Aguilar, G., Realmuto, J., & Sheng, J. (2024). Design and Characterization of Soft Fabric Omnidirectional Bending Actuators. Actuators, 13(3), 112. https://doi.org/10.3390/act13030112