1. Introduction
Dielectric Elastomers (DEs) are known for their significant potential in performing muscle-like actuation. A typical dielectric elastomer actuator (DEA) has a sandwiched structure with a thin DE film coated with compliant electrode material. When a driving voltage (∼kV) is applied to the electrode region, it generates planar expansion and contraction through the thickness. DE actuation features compliance, low cost, high energy density and noise-free operation. In addition, the actuation strain generated by DEAs is similar to that of human muscles [
1,
2,
3]. Applications have been explored in robotics [
4,
5,
6] and muscle-like actuation [
7,
8,
9]. Moreover, their outstanding electro-mechanical properties allow effective energy conversion from mechanical to electrical forms, yielding DE devices capable of sensing [
10,
11,
12] and energy harvesting [
13,
14,
15,
16].
While most applications of DEAs utilize planar expansion for actuation, extension actuation may cause wrinkling in electrode regions in the direction of actuation and fail to transmit demanded voltage-induced deformation [
12]. Contractile actuation, as in real muscles, is therefore a more feasible and reliable soft actuation solution. Only a few researchers have explored the potential of DEAs in generating contractile motion. Carpi et al. developed a cylindrical contractile DEA [
17]. The DE was cut into fine helices and had electrodes applied to the helical surfaces. The DEA contracted in the longitudinal direction with a maximum contraction strain of 5%. Folded [
18] and stacked [
19] contractile DEAs (cDEAs) were then developed to be able to contract up to 45%. These multi-layer cDEAs utilize the voltage-induced contractile strain through the thickness. However, they are time consuming and difficult to fabricate. When loaded in tension, they have increased thickness and hence lowered electrical field, making them less effective in performing contractile force actuation. Moreover, this approach can only utilize stress-free DEs because pre-strains in planar directions are difficult to apply and maintain. The advantages that pre-straining can give to DEAs therefore has limited potential for further optimization.
A few works have exploited the compression of passive regions between electrode regions in DEAs to achieve planar contraction up to 30%, such as tuneable optical gratings [
20,
21], cell cultures [
22] and tuneable lenses [
23]. This method of generating contraction relies on planar expansion in the direction of actuation as with extension DEAs. The functionality degrades when loss of tension in electrode region occurs at higher driving voltages. Moreover, contraction in pre-strained passive region can only deliver contraction strain, with no contraction force, which limits practical applications. Recently, Lee and Tawfick developed Micro-architected Electro–Elasto–Kinematic (MEEK) muscle [
24], which generates contraction strains up to 6.3%. The DE has equal bi-axial pre-strains in planar directions and web-like fibre reinforcement on both sides. When a driving voltage is applied, each rhombus-shaped electrode cell, depending on the constraining angle of fibre reinforcement, contracts in one planar direction and expands in another planar direction. It is noted that similar configurations with fully constrained electrode regions were developed as Bowtie-shaped [
25] and Diamond-shaped actuators [
26], but with the focus on extension actuation. Compared with multi-layer cDEAs, planar cDEAs generate less contraction strain, but they are easy to fabricate into versatile formats, making them ideal for applications in active wearable devices and incorporation with other types of planar DEAs for generating complex motions. While Lee and Tawfick’s work focused on modelling small contractile motion of MEEK muscle at relatively low driving voltages up to 1.5 kV, the contraction potential of a planar cDEA is yet to be explored fully. Furthermore, it is unclear how a planar cDEA is affected by non-linearities (e.g., off-plane deformation) during high voltage driven actuation and various pre-strain configurations.
This work addresses the above research gaps using a planar cDEA that has a single rod-constrained rhombus-shaped electrode region. Firstly, a cDEA with equal bi-axial pre-strains at driving voltages up to 4 kV is presented and compared with Lee and Tawfick’s work to identify the effect of off-plane deformation on contraction strain; secondly, a cDEA with biased bi-axial pre-strains is investigated and compared with the first experiment to show the effect of pre-straining on contraction strain; thirdly, a modified planar cDEA is used to demonstrate contractile force actuation; Finally, the stability, failure mode and optimization of the planar cDEA are presented and discussed.
2. Theory
The equations of state for an ideal incompressible DE are [
27]
where
are the current stresses in planar directions,
are the stretches, the ratios of lengths between deformed and undeformed (i.e., no applied forces and voltages) states in planar directions,
is the permittivity of the DE,
V is applied voltage,
H is thickness of the DE and
is the Helmholtz free energy density. When the DEA has equal bi-axial pre-strains (
, where
p denotes pre-stretches), the DE deforms the same in planar directions as follows:
When the DEA has biased bi-axial pre-strains (i.e.,
), the DE is stiffer in the more pre-strained direction and therefore deforms preferably in the perpendicular direction [
27,
28]. Large pre-strain and relatively small voltage-induced expansion therefore result larger overall tension and stretch in the more pre-strained direction:
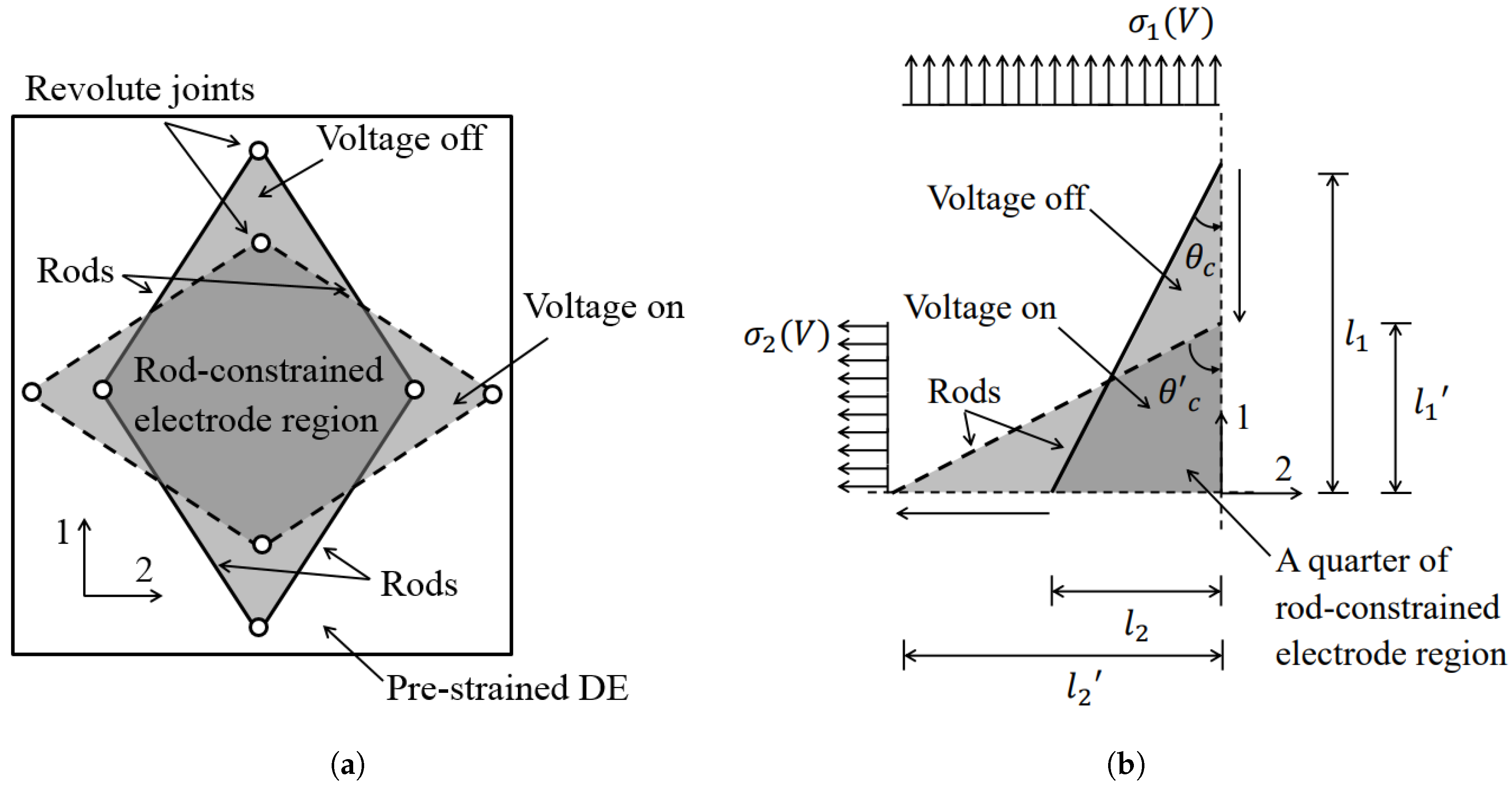
In the planar cDEA, the electrode regions are constrained by rods at edges, which are free to rotate relative to each other. Thus the planar cDEA may deform from one rhombus shape to another during actuation as shown in
Figure 1a. The actuation strains,
and
, are defined as changes in the lengths of rhombus diagonals between the un-actuated (
) and actuated states (
):
The constraining angle of the rod-constrained electrode region,
(
), is defined as the angle of the rod relative to Direction 1 as in
Figure 1b.
cDEAs have two distinct states during actuation: the equilibirum state and the neutral state. The neutral state is defined as the state of planar cDEAs that any further increase in driving voltage will not generate actuation strains in both planar directions, which depends on a specific constraining angle under a given bi-axial pre-strain condition. The equilibrium state is the steady state that planar cDEAs, which are not in neutral state, reach during the actuation. When a driving voltage,
V, is applied, the rod-constrained electrode region deforms according to the voltage-induced stresses,
and
and the constraining angle changes from
to
(
) as in
Figure 1b. In an ideal scenario, a cDEA is driven by sufficiently high voltage without the occurrence of electrical breakdown and off-plane deformation. Then the rod-constrained electrode region deforms until it reaches the neutral state with the constraining angle,
(
), where reorientation of the rods brings equilibrium between planar stresses in planar directions. In the neutral state, further increase in driving voltage does not change the constraining angle further (
) but only causes off-plane deformations in both planar directions. In reality, when a planar cDEA is driven by low voltages (∼kV, causing in-plane expansion only), the rod-constrained electrode region deforms and reaches a equilibrium state instead of the neutral state (
).
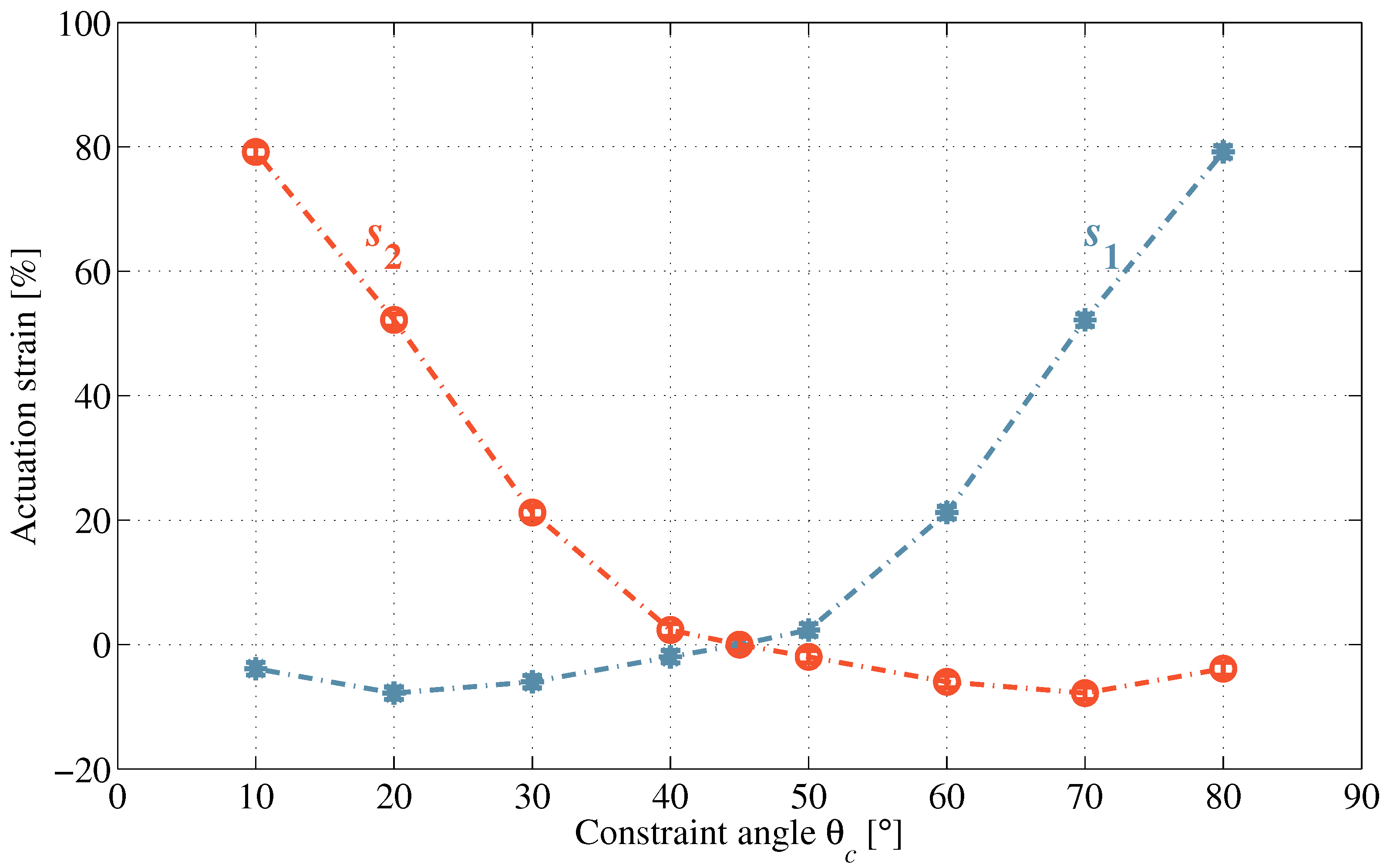
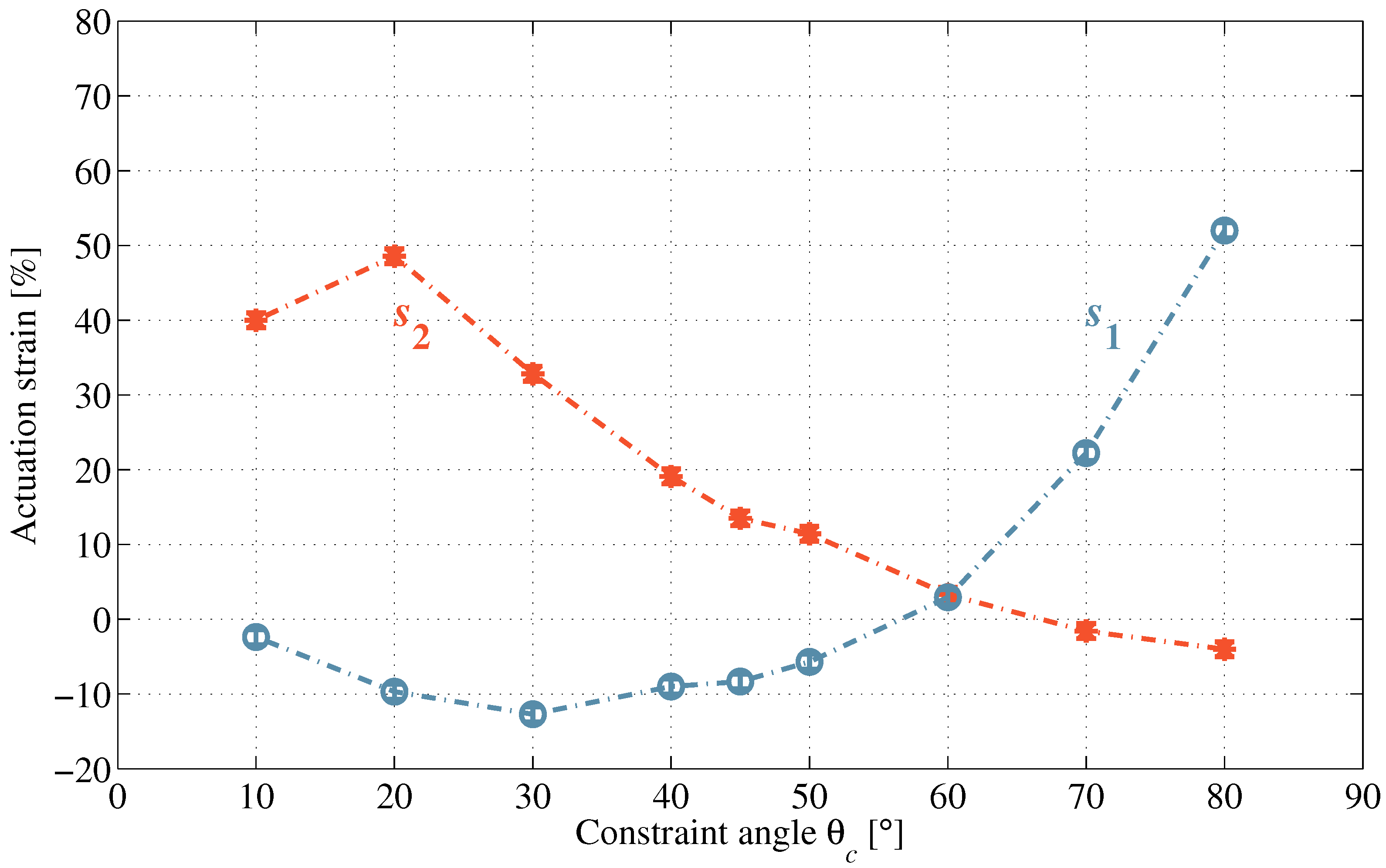
The neutral state of a planar cDEA depends on the bi-axial pre-strain condition. When a planar cDEA has equal bi-axial pre-strains (), the electrodes tends to expand in both planar directions equally, resulting the neutral state has the constraining angle . When the rod-constraining configuration matches this neutral state, no contraction and extension strains would be generated during actuation (). In most cases where , actuation strains in planar directions are symmetric about (i.e., = ). When a planar cDEA has biased bi-axial pre-strains (), the neutral state has an increased constraining angle as . In the case , no actuation strains are generated during actuation; in other cases , the contraction and extension in planar directions occur but are no longer symmetric about (i.e., ).
The exception happens when off-plane deformation occurs only in Direction 1 under high driving voltages (∼kV, causing off-plane expansion). Planar stress in Direction 1 is significantly reduced as
, and the voltage-induced stress in Direction 2,
, dominates the equilibrium of planar stress. The neutral state no longer restricts deformation and larger change in constraining angle may occur, causing significant increase in extension strain,
, and contraction strain,
, compared with the case without off-plane deformation at low driving voltages (∼ kV), as in Lee and Tawfick’s work [
24].
3. Experimental Procedure
To investigate and explore the potential of a planar cDEA in performing planar contraction, three sets of experiments were carried out as follows:
Measure the effect of constraining angle on contraction strain under an equal bi-axial pre-strain condition.
Measure the effect of biased bi-axial pre-strain on contraction strain under the same rod-constraining as in 1.
Measure the contraction force with optimized rod-constraining and a bi-axial pre-strain condition.
The DE was VHB 4910 from 3MTM in a basic 1 mm thick film format. The electrode material was carbon black grease from MG ChemicalsTM. The steel rods for motion-constraining had a diameter of 1 mm.
3.1. Experiment 1
The DE was cut into square areas 35 mm × 35 mm, which were then pre-strained by 300% in both planar directions (
, leading to an overall planar pre-strain of
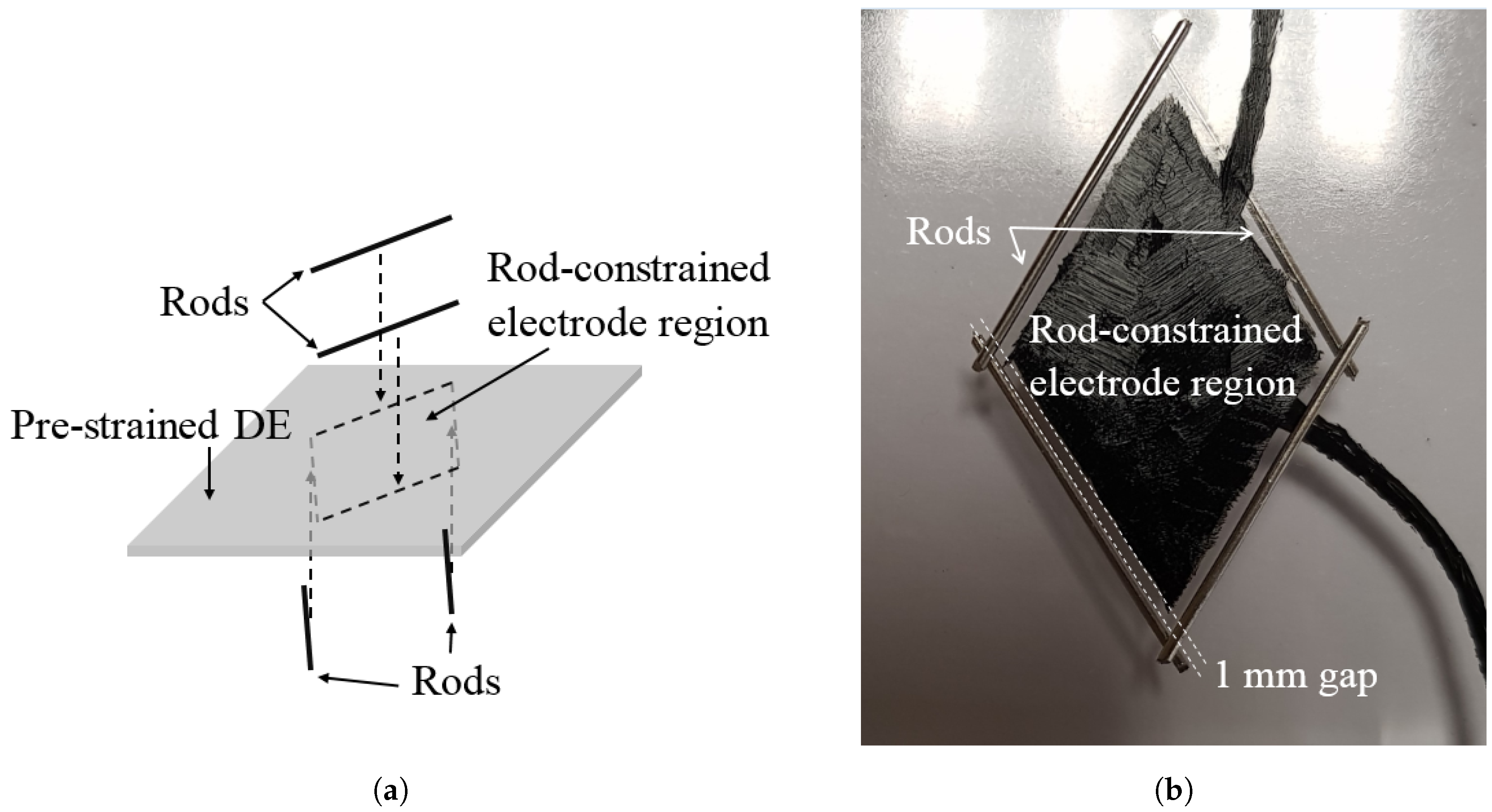
) and clamped onto a rigid frame of size 100 mm × 100 mm. Four rods were placed on the pre-strained DE to form a rhombus-shaped region in edge length 20 mm as shown in
Figure 2a. Two pairs of rods of length 22 mm were applied on both sides of the DE. Rods were configured to be longer than the edge length to ensure that the four corners were constrained on both sides and could rotate only. This is essential for achieving planar contraction strain.
Figure 2b shows that the actual sample has the electrode region with a small gap of approximately 1 mm between the pair of rods on each side. Such a configuration prevents premature failure (i.e., electrical breakdown) by avoiding applying driving voltage. This is due to:
The conductive rods (i.e., no electrical field on the constrained corners).
The regions of the DE close to corners that are distorted significantly during actuation (i.e., less stress concentration due to actuation).
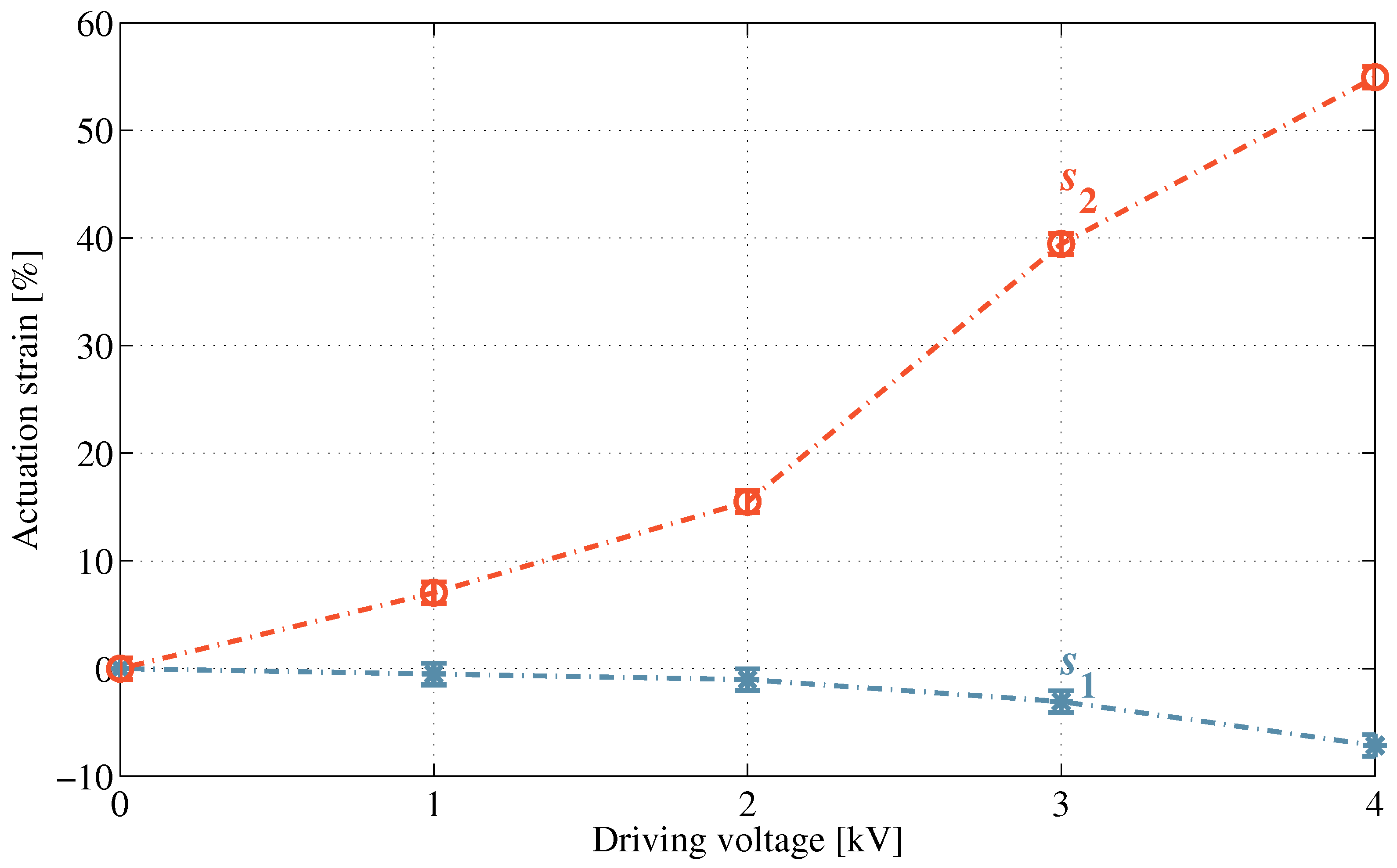
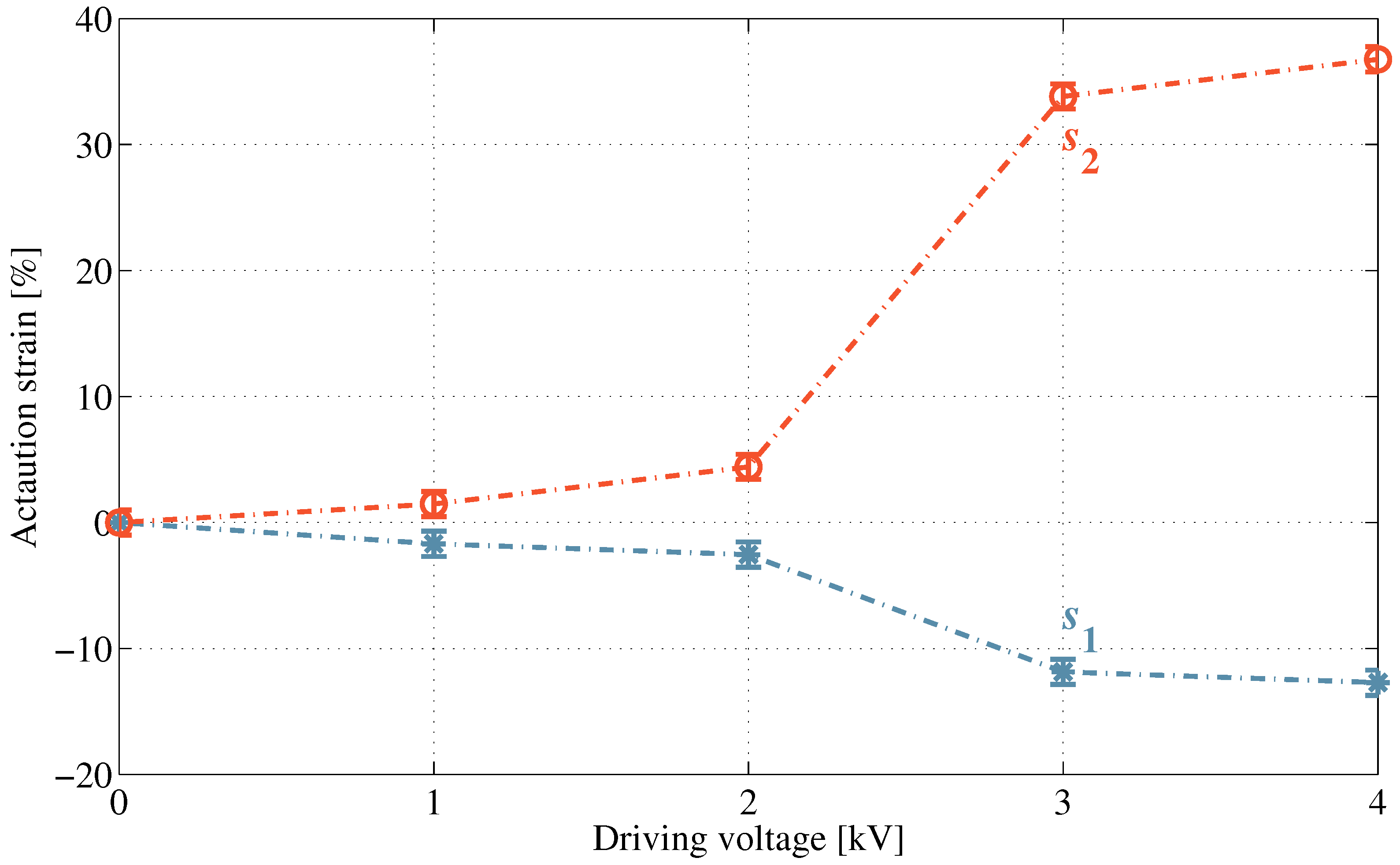
In this experiment, because samples were pre-strained equally in planar directions, constraining angles of and were tested. At each constraining angle, the actuations were driven by voltages of 1 kV, 2 kV, 3 kV and 4 kV.
3.2. Experiment 2
The DE was cut into rectangular areas of 52 mm × 25 mm, which were then pre-strained by 200% in Direction 1 () and 450% in Direction 2 (). The same configurations of rods, electrode arrangement and driving voltages were applied on samples. Because the samples have the same overall pre-strain of 900% () as in Experiment 1, the same driving voltage leads to the same electrical field on the planar cDEA. Constraining angles of , , , , , , , and were tested in this experiment. At each constraining angle, the specimen was driven by voltages of 1 kV, 2 kV, 3 kV and 4 kV.
3.3. Experiment 3
In order to demonstrate contractile force actuation, modified planar cDEAs, under both equal and biased bi-axial pre-strain conditions and the identified constraining angles that generate the largest contraction strains from Experiments 1 and 2, were tested. The configurations of rods, electrode arrangement and driving voltages remained the same. A rigid frame was added to the structure to hold cDEAs in pre-strain in Direction 2.
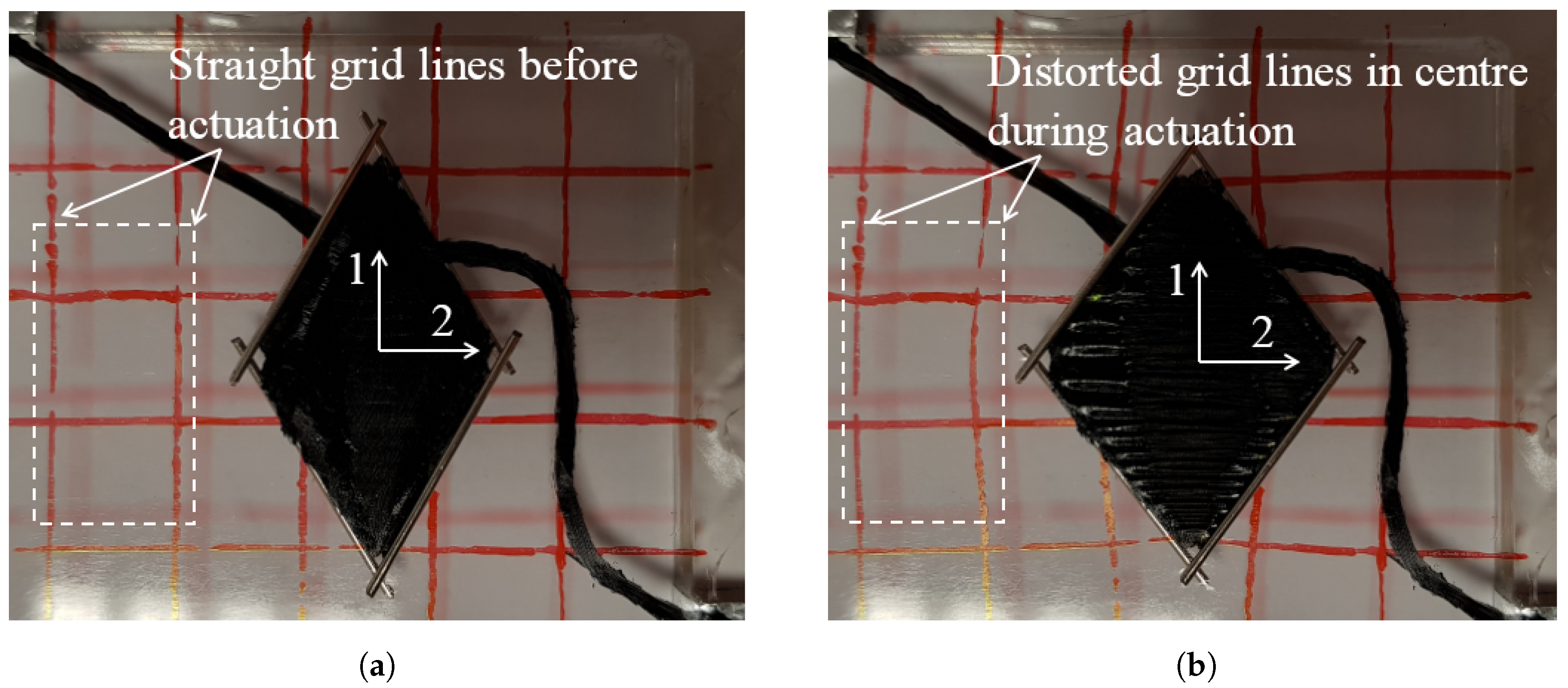
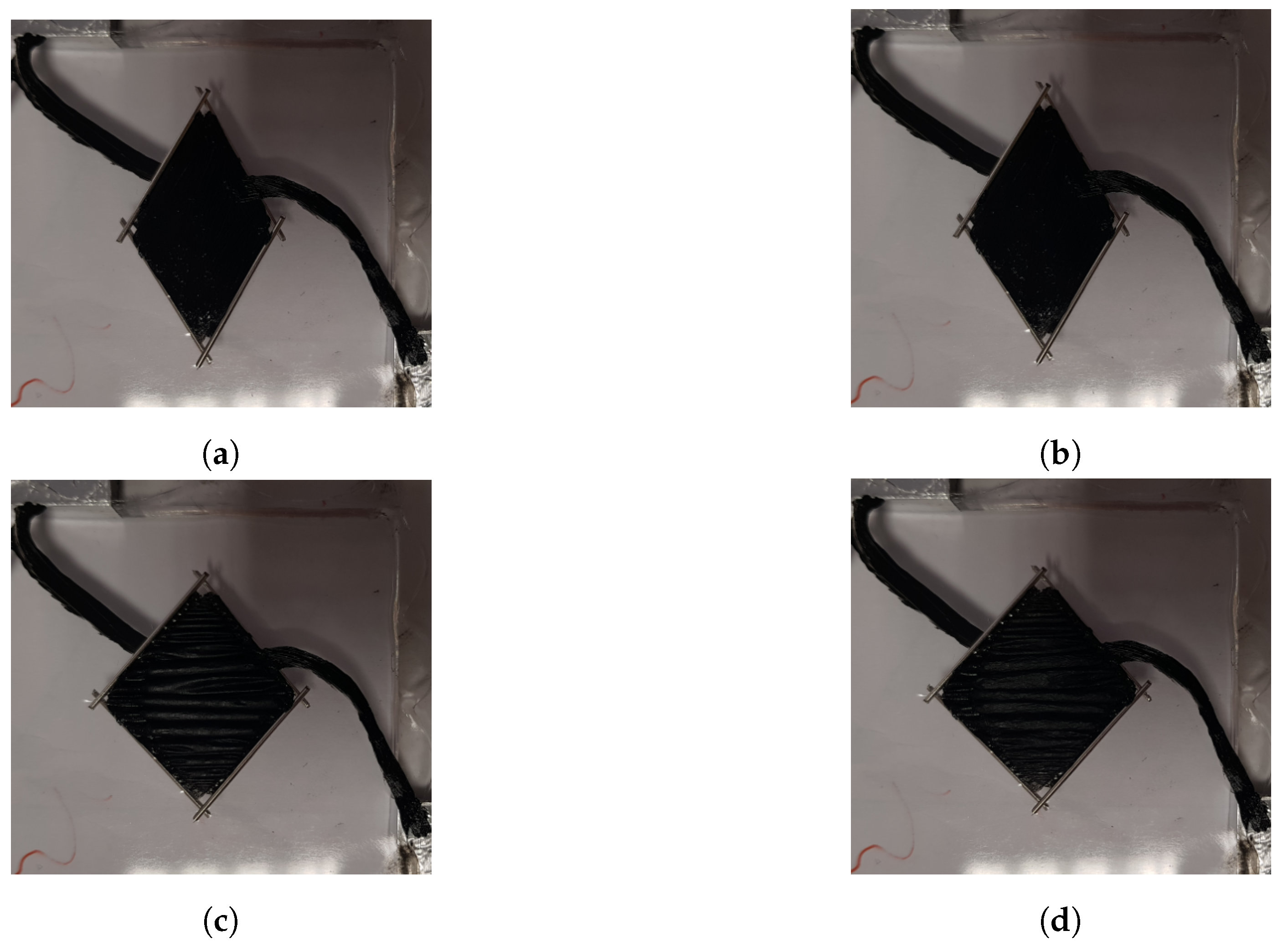
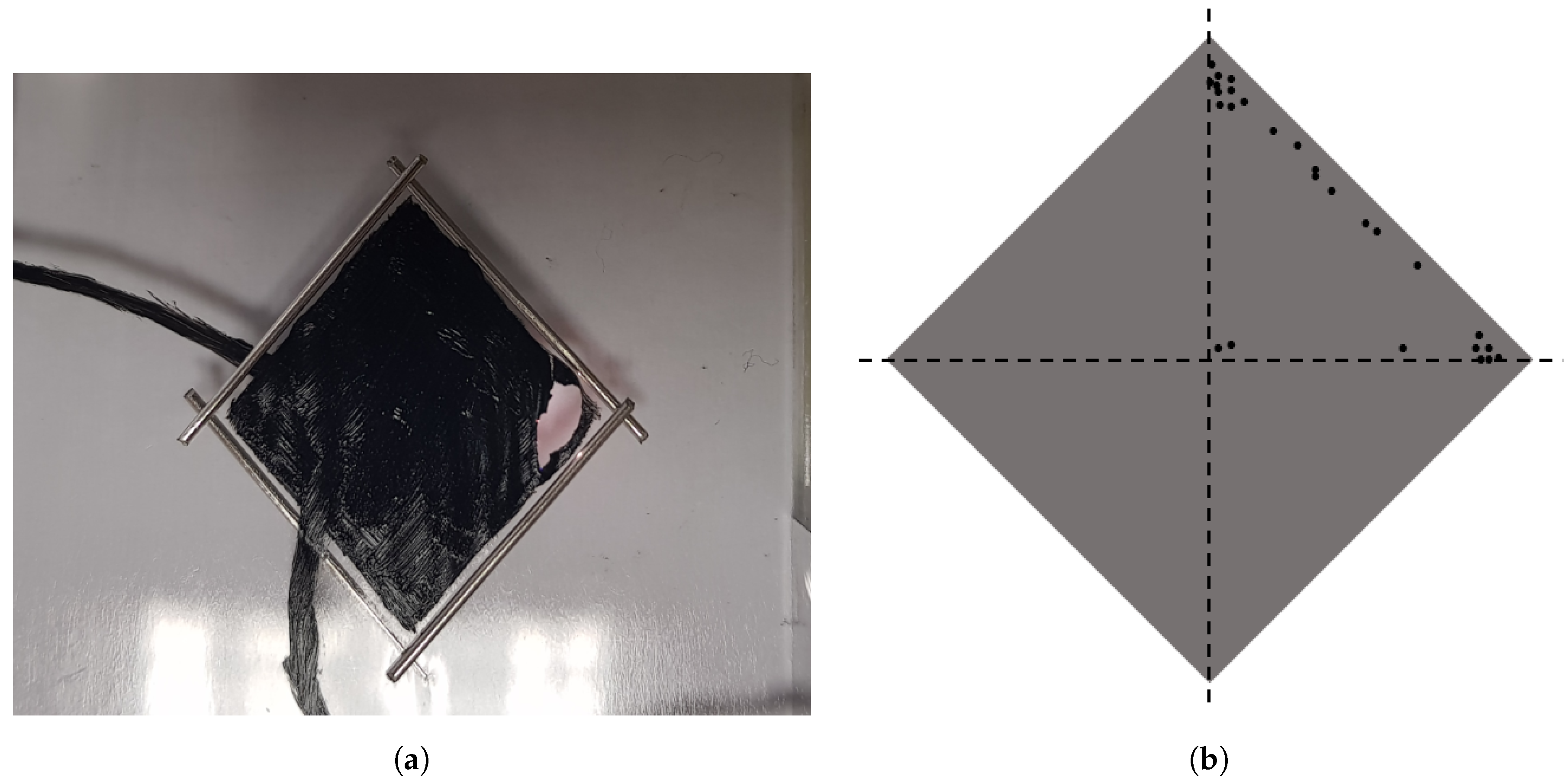
The design of the rigid frame was guided by a preliminary investigation to understand the field of deformation around rod constrained electrode region in the planar cDEA as in
Figure 3. The pre-strained DE was marked in a grid of cell sizes of 10 mm × 10 mm before being fabricated fully into the planar cDEA as in
Figure 3a.
Figure 3b shows that inactive region extends in Direction 1 and contracts in Direction 2 for the planar cDEA during actuation. The distorted grid lines show that deformation of the inactive region occurs mainly at corners of the rod-constrained electrode region and diminishes further away. Therefore, for an effective planar cDEA to generate contractile force, it is essential to:
Eliminate the inactive region in Direction 1 to ensure that no contraction strains are dissipated by the inactive region.
Preserve a sufficient inactive region around rod-constrained corners in Direction 2 to allow extension strain to occur in-plane.
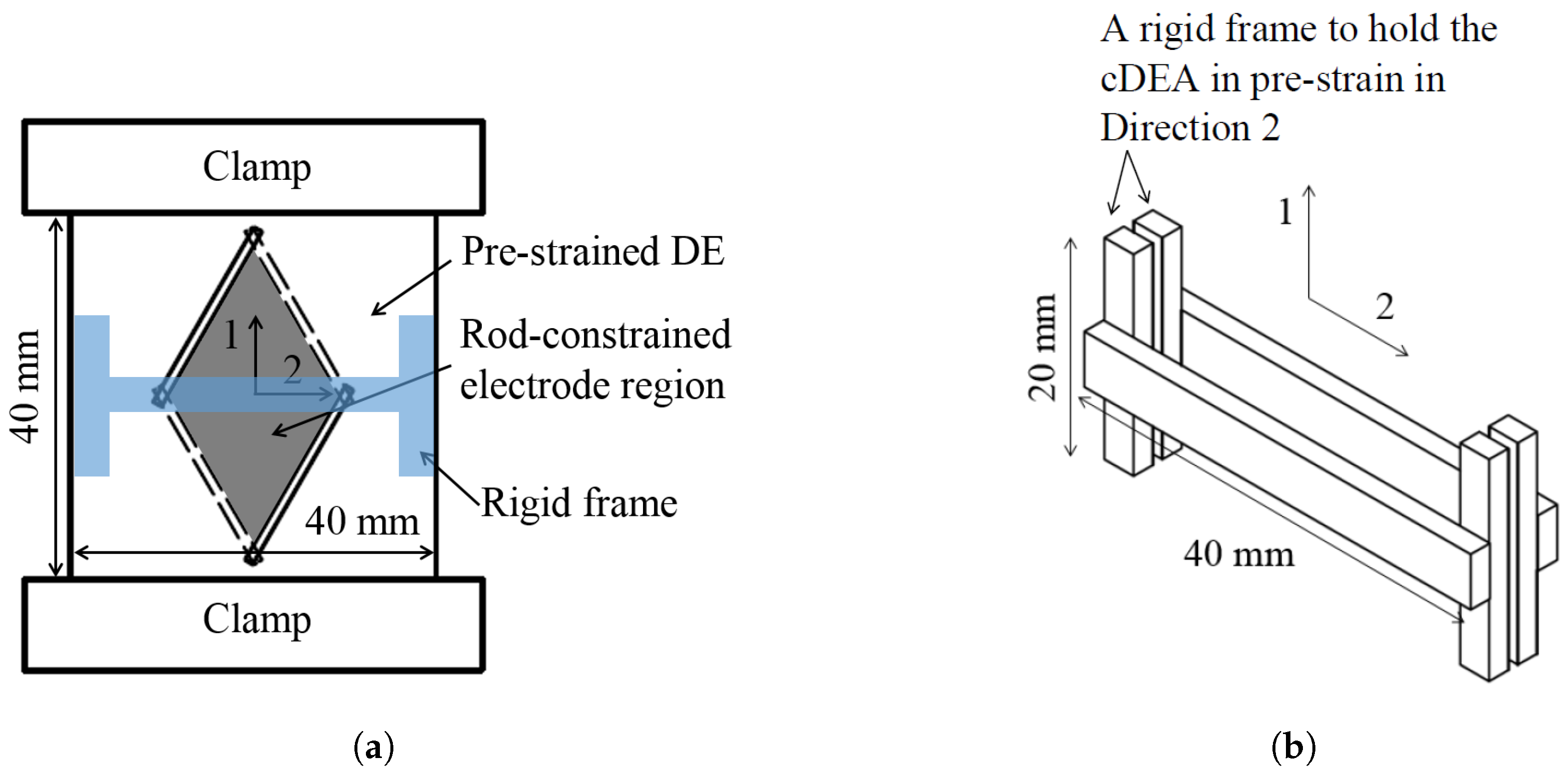
Figure 4a shows the configuration of the implemented cDEA for contractile force actuation. The width of the DE was set to be 40 mm and clamps, which were used to mount the planar cDEA onto the test rig, were placed close to electrode regions in Direction 1. A pair of frame as shown in
Figure 4b was made of acrylate and placed on both sides of the planar cDEA to hold
in the centre of structure (i.e., next to the rod-constrained corners).
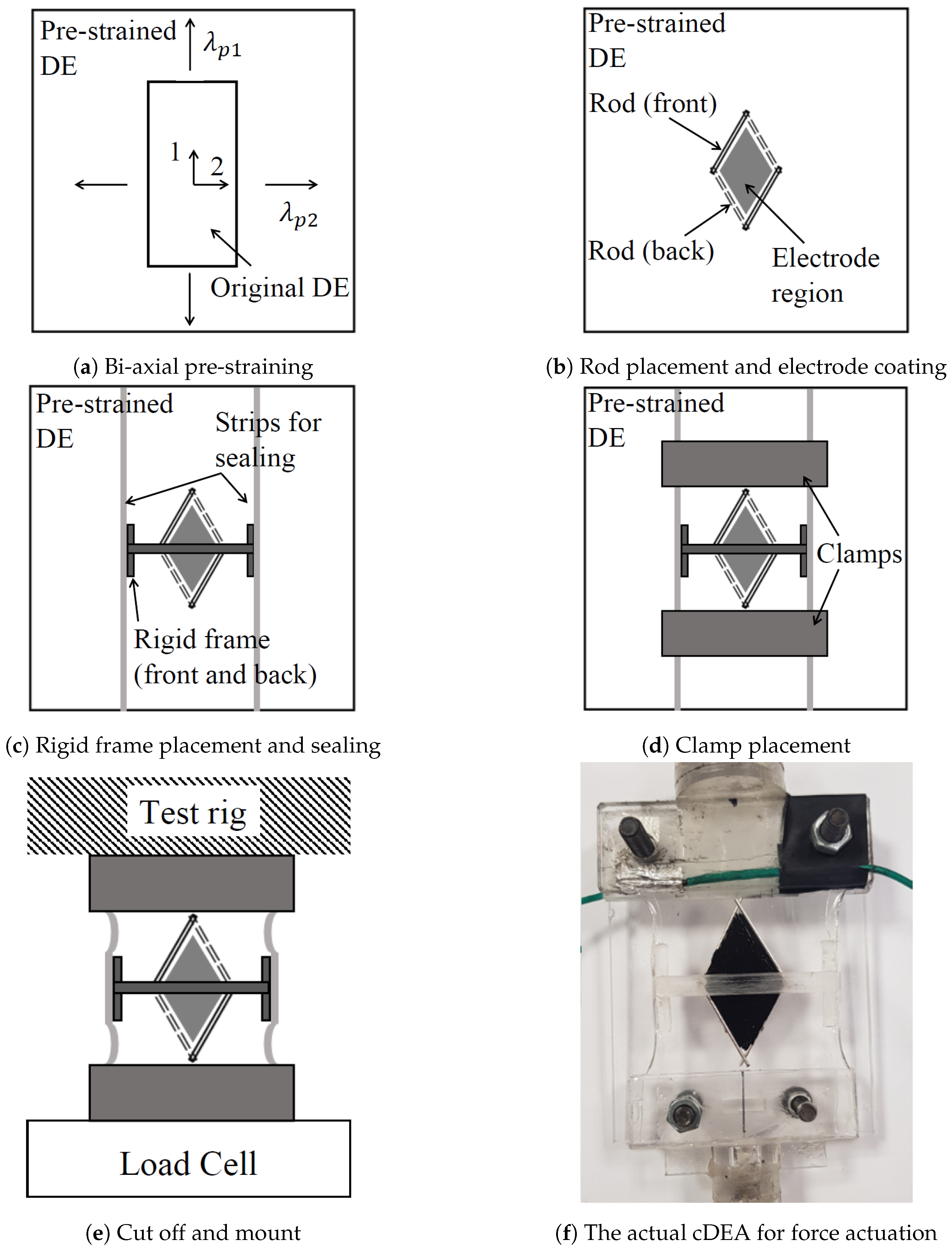
The detailed fabrication process steps are shown in
Figure 5. When the DE was pre-strained largely in planar directions, it became specifically notch-sensitive (i.e., small cuts and defects propagate rapidly) and was difficult to maintain the configured shape. A pair of VHB 4910 strips was added on both sides of the pre-strained DE as shown in
Figure 5c. They acted as boundaries to stop any defects from propagating. To be consistent, the strips were pre-strained as for the planar cDEA in Direction 1 (
). In
Figure 5d,e, one halves of the clamps were applied prior to DE cutting in alignment with an additional frame, which was used to preserve the overall shape of the planar cDEA before mounting in the test rig. The second halves of the clamps were applied after DE cutting, and the additional frame was removed after the planar cDEA was mounted in the test rig.
3.4. Measurement System Setup
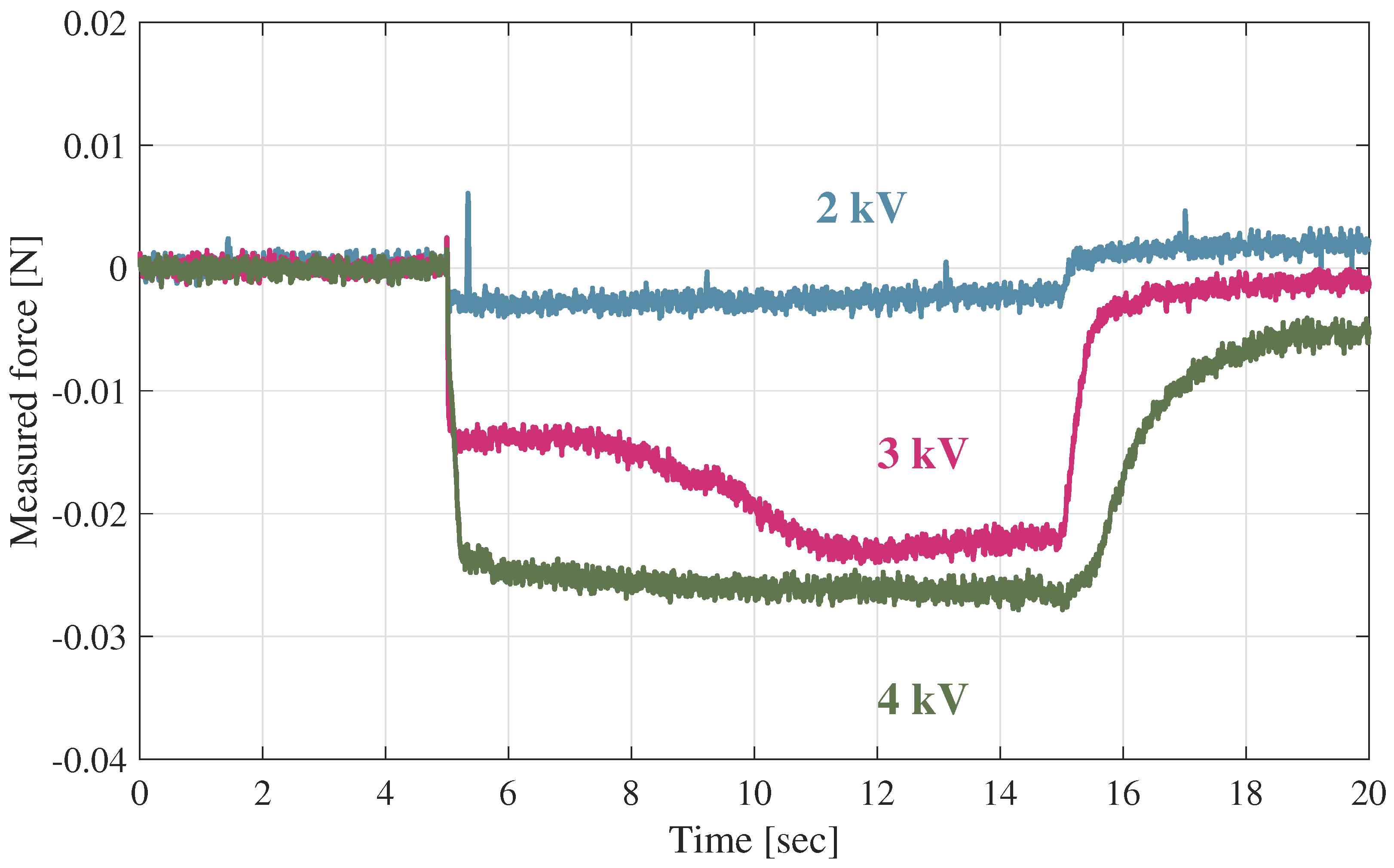
For Experiments 1 and 2, the states of the planar cDEA were recorded by a camera, which had a fixed position during experiments. For Experiment 3, modified planar cDEAs were fixed to the test rig on the top and mounted onto a load cell on the bottom. The load cell was customized to measure small forces up to 5 N. Voltages were applied to the samples in various sequences and the force was measured by the load cell throughout.
A high-voltage (HV) generator, based on a HV DC-DC converter (module 15A24 from PPMTM), was used to amplify the input voltage (0–5 V) to the voltage output (0–15 kV). In Experiment 3, the actual voltage output was also measured using a built-in channel from the HV module.
5. Conclusions
In this work, the structure of a planar cDEA that generates planar contraction has been studied. Compared with a conventional DEA, it has a rhombus-shaped electrode region with rods constrained on edges. Rods overlap at corners to form revolute joints, making them free to rotate relative to each other. Hence, when driving voltages are applied, the rod-constrained electrode region deforms from one rhombus shape to another, resulting in contraction in one planar direction and extension in another. The actuation strains depend on the constraining angle of rods relative to planar directions. There is a neutral state of rod constraining in planar cDEAs, where the orientation of rods brings equilibrium between voltage-induced planar stresses. When the rod-constraining configuration matches the neutral state, no in-plane actuation strains are detected, but only off-plane deformation will occur in both planar directions. When the rod-constraining configuration is not in the neutral state, the voltage-induced planar stresses, depending on driving voltages, cause rods to rotate until they reach an equilibrium orientation around the neutral state. The neutral state restricts the maximum contraction that could occur in a planar cDEA.
Two strategies that allow a planar cDEA to contract further are presented and discussed; namely, off-plane deformation and biased pre-straining. It was demonstrated that at high driving voltage, it is possible to make off-plane deformation occur only in the direction of contraction, causing voltage-induced planar stresses in this direction to decrease significantly. Voltage-induced planar stresses in the direction of extension therefore dominate the equilibrium and the neutral state no longer restricts deformation of the rod-constrained electrode region. It was also demonstrated that when a planar cDEA has biased bi-axial pre-strains, the rod-constrained electrode region deforms preferably in the more pre-strained direction. Then, the neutral state changed from , as for equal bi-axial pre-strain condition, allowing larger deformation and further reorientation of rods. By incorporating these two cases, the planar cDEA is capable of generating twice the contraction strain than that reported previously.
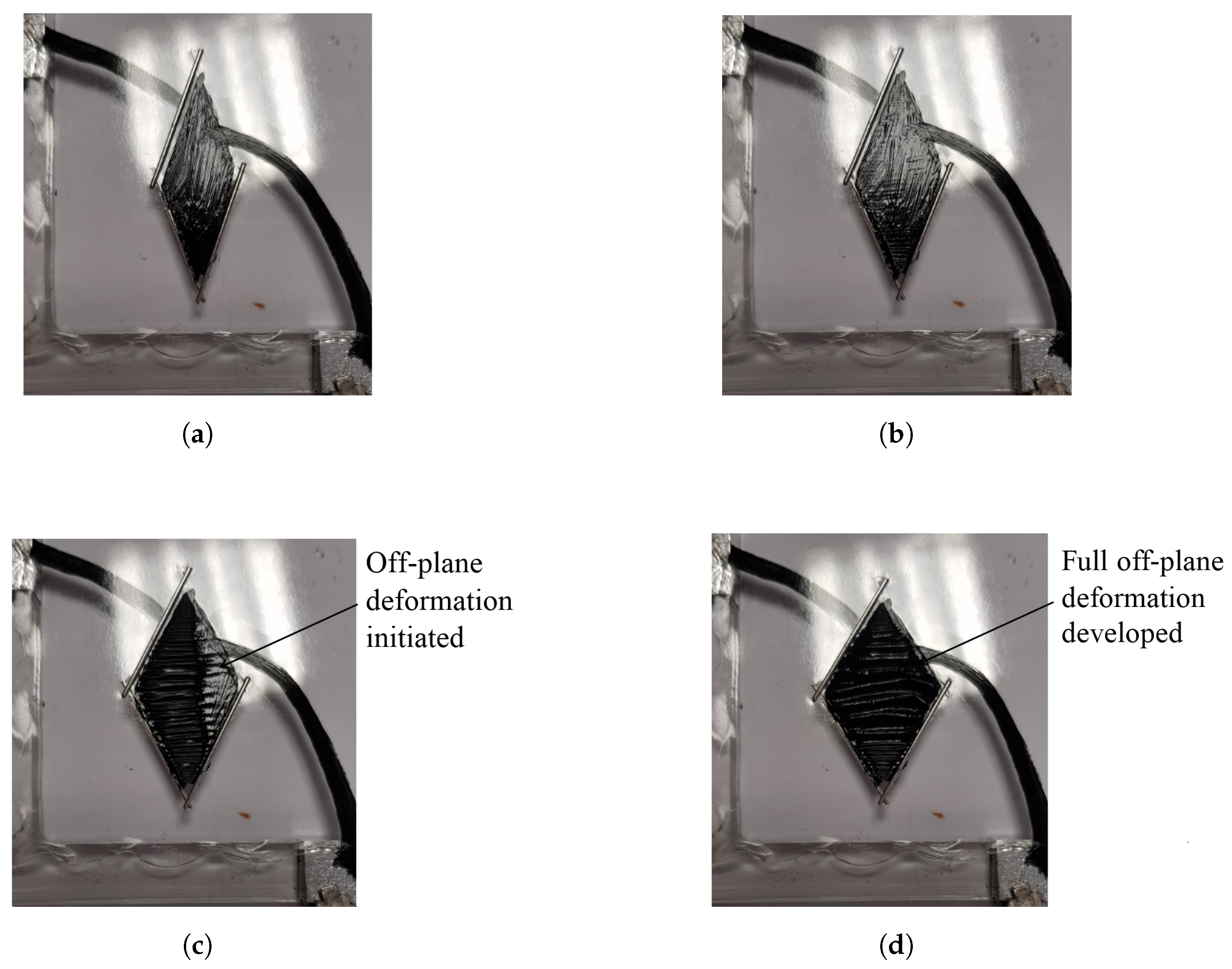
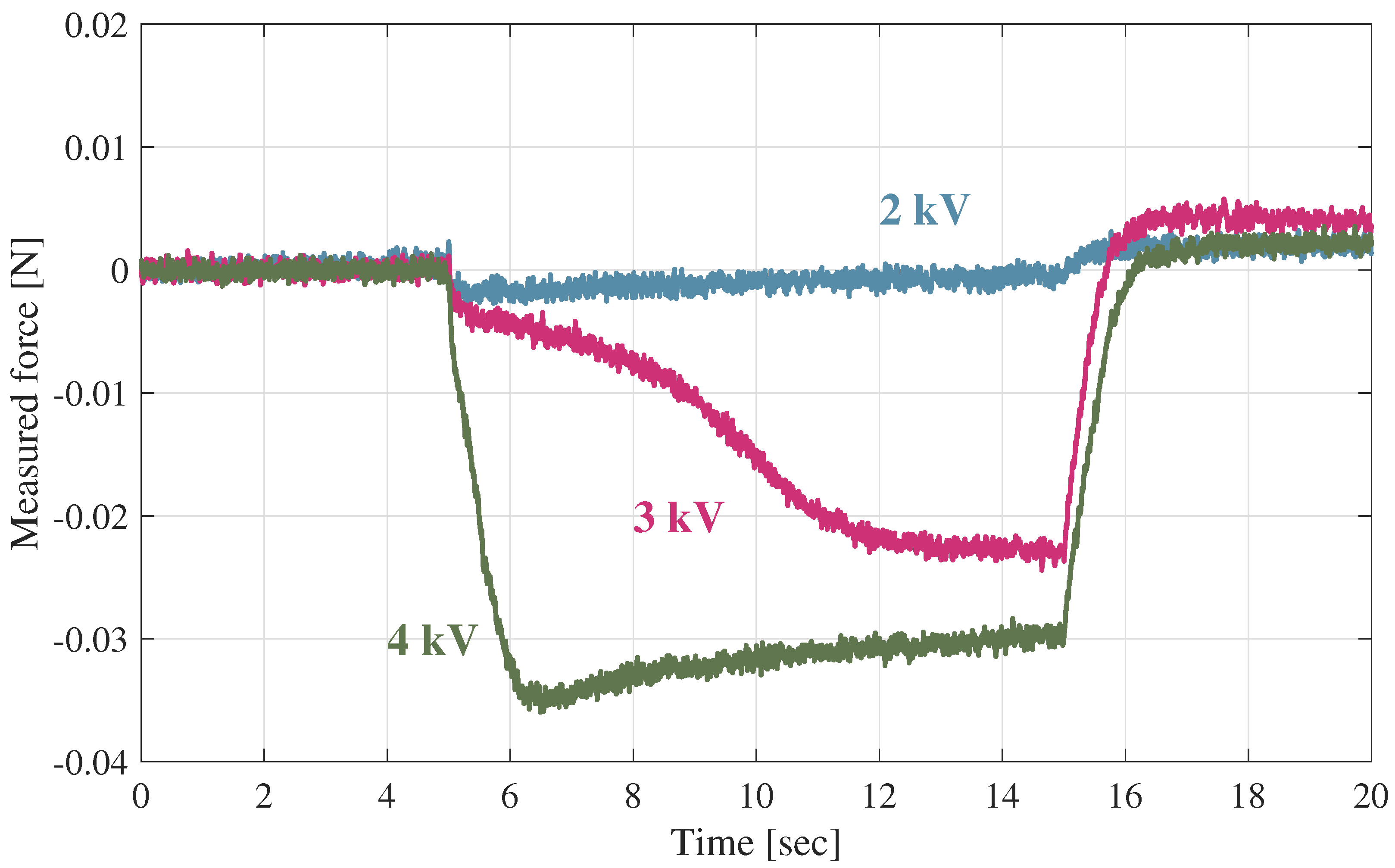
The effectiveness of these strategies was demonstrated further in force actuation. A modified planar cDEA that has the same electrode arrangement was developed. In addition, a rigid frame was added to the structure to maintain the pre-train in the lateral direction to contraction. The results show that the voltage-induced contraction force is significantly larger at high driving voltages, with occurrence of off-plane deformation, than that at low driving voltage. Furthermore, better actuation capability of the cDEA with biased bi-axial pre-strains than that with equal bi-axial pre-strains is evident. The results show also propagation of off-plane deformation from a locality to the entire electrode region. It explains the significant increase in contraction strain at high driving voltages and proves that such off-plane deformation is entirely due to loss of tension, rather than electromechanical instability.
The stability and failure study of the planar cDEA shows that the common failure mode is electrical breakdown. The common failure locality is close to the corners, where the rod-constrained electrode region distorts the most. The stability of the planar cDEA can therefore be improved by having electrode regions away from corners. Finally, the planar cDEA can be rearranged into a long and narrow fibre-like format, having electrode cells aligned in direction of contraction. However, it is vital to preserve sufficient inactive regions around electrode cells in the direction of extension, which would otherwise cause an electrode cell to buckle in both planar directions and no contraction.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














