Directional Stiffness Control Through Geometric Patterning and Localized Heating of Field’s Metal Lattice Embedded in Silicone


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Test Piece Fabrication
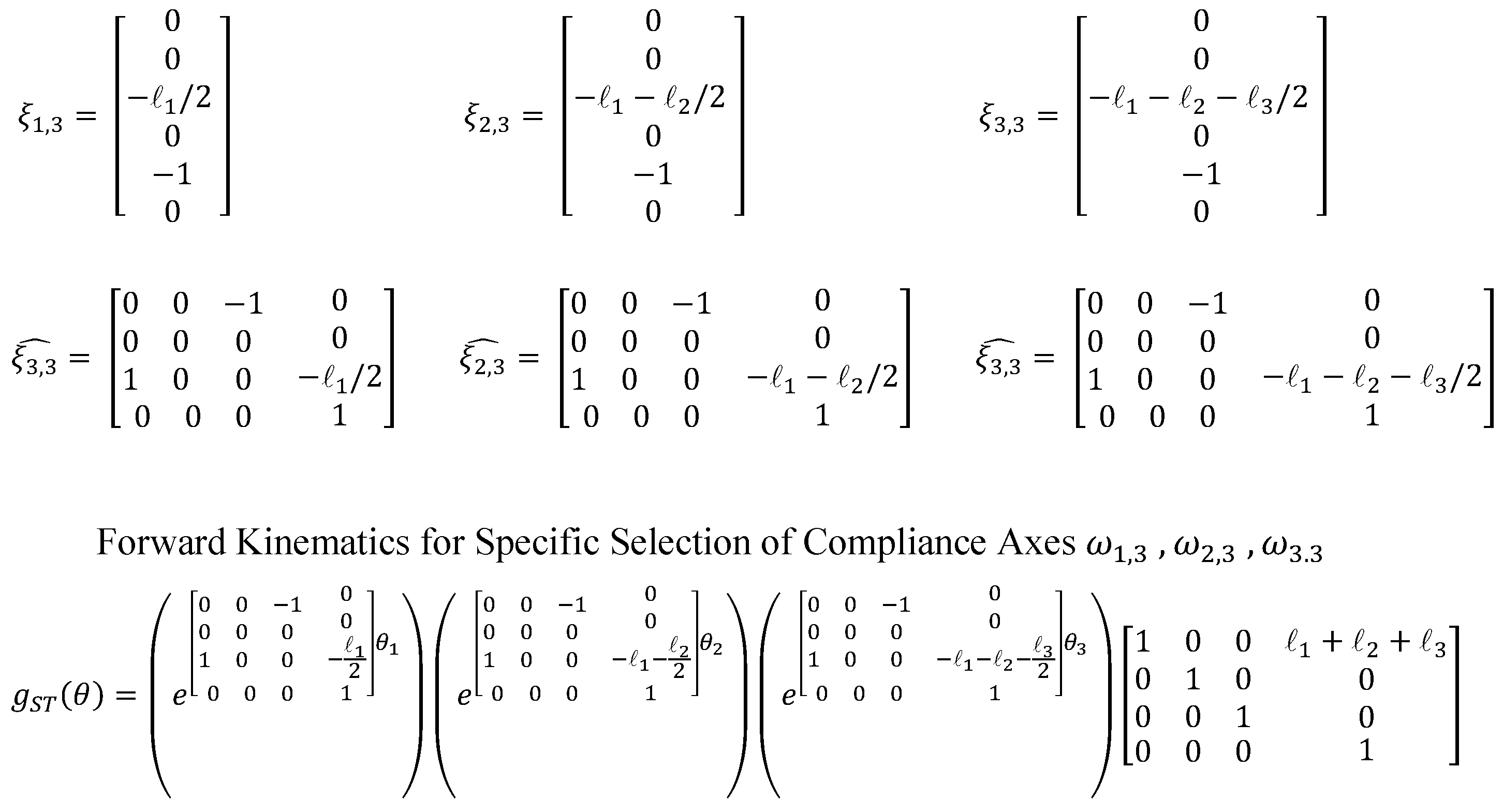
2.2. Deriving Forward Kinematics with Changing Axes of Compliance
2.3. Predictive Model
3. Results
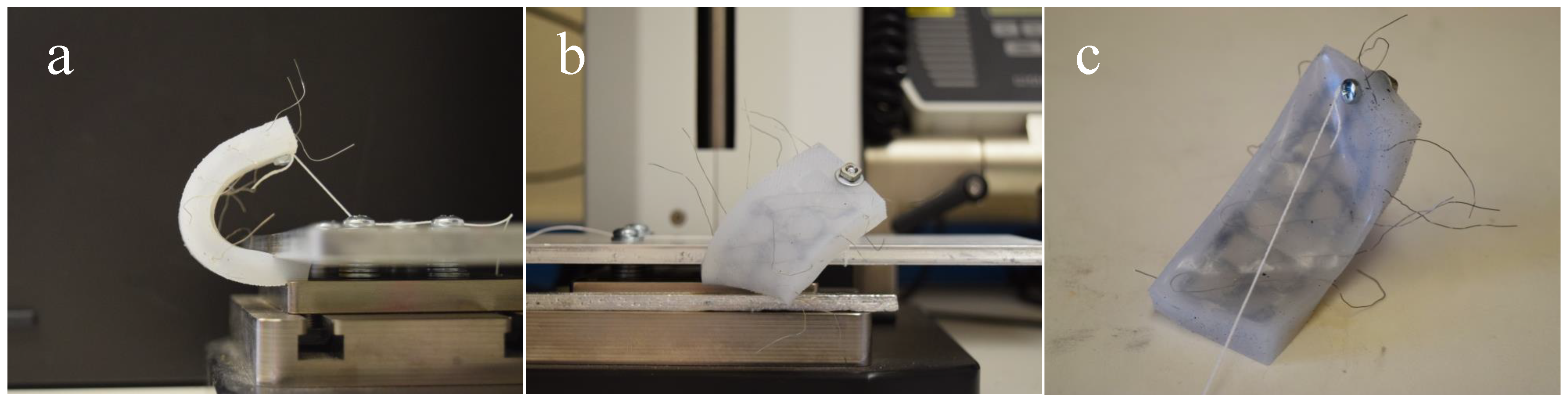
3.1. Verification from Physical Model
3.2. Successive Melting
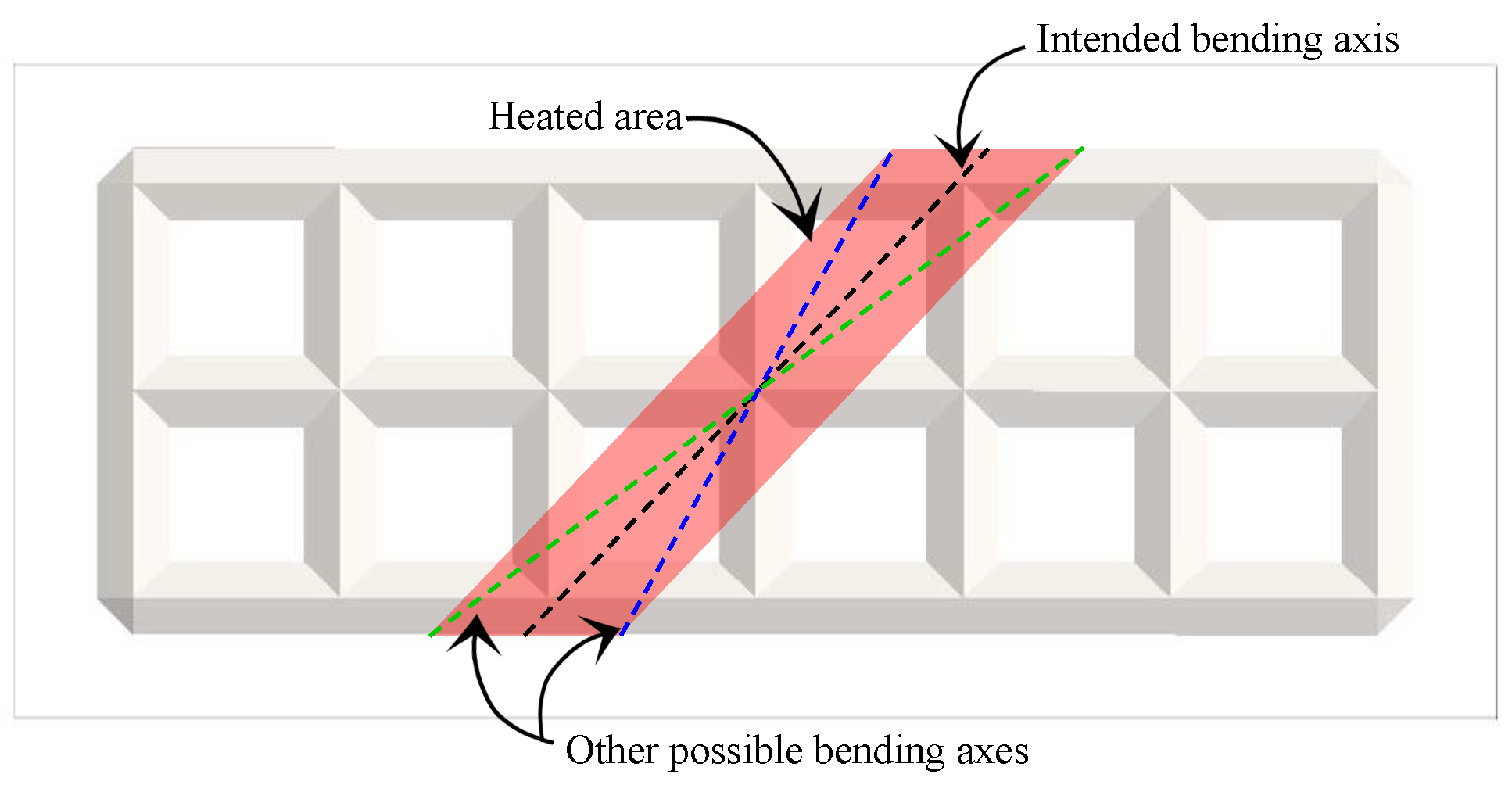
3.3. Grid Spacing
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1. [Google Scholar] [CrossRef]
- Majidi, C. Soft Robotics: A Perspective—Current Trends and Prospects for the Future. Soft Robot. 2014, 1, 5–11. [Google Scholar] [CrossRef]
- Yap, H.K.; Yong Ng, H.; Yeow, R.C.H. High-Force Soft Printable Pneumatics for Soft Robotic Applications. Soft Robot. 2016, 3, 144–158. [Google Scholar] [CrossRef]
- Yang, G.Z.; Bellingham, J.; Dupont, P.E.; Fischer, P.; Floridi, L.; Full, R.; Jacobstein, N.; Kumar, V.; McNutt, M.; Merrifield, R.; et al. The grand challenges of Science Robotics. Grand Chall. Sci. Robot. 2018, 3, eaar7650. [Google Scholar] [CrossRef]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef] [PubMed]
- Daerden, F.; Lefeber, D. Pneumatic artificial muscles: Actuators for robotics and automation. Eur. J. Mech. Environ. Eng. 2002, 47, 11–21. [Google Scholar]
- Trivedi, D.; Rahn, C.; Kier, W.; Walker, I. Soft Robotics: Biological Inspiration, State of the Art, and Future Research. IEEE ICRA 2008, 5, 99–117. [Google Scholar] [Green Version]
- Beyl, P.; Van Damme, M.; Van Ham, R.; Vanderborght, B.; Lefeber, D. Pleated Pneumatic Artificial Muscle-Based Actuator System as a Torque Source for Compliant Lower Limb Exoskeletons. IEEE/ASME Trans. Mechatron. 2014, 19, 1046–1056. [Google Scholar] [CrossRef]
- Miriyev, A.; Caires, G.; Lipson, H. Functional properties of silicone/ethanol soft-actuator composites. Mater. Des. 2018, 145, 232–242. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Polygerinos, P.; Wang, Z.; Overvelde, J.T.B.; Galloway, K.C.; Wood, R.J.; Bertoldi, K.; Walsh, C.J. Modeling of Soft Fiber-Reinforced Bending Actuators. IEEE Trans. Robot. 2015, 31, 778–789. [Google Scholar] [CrossRef]
- Tan, N.; Gu, X.; Ren, H. Design, characterization and applications of a novel soft actuator driven by flexible shafts. Mech. Mach. Theory 2018, 122, 197–218. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Kaynak, A.; Khoo, S.Y.; Kouzani, A. Pattern-driven 4D printing. Sens. Actuators A Phys. 2018, 274, 231–243. [Google Scholar] [CrossRef]
- Su, J.W.; Tao, X.; Deng, H.; Zhang, C.; Jiang, S.; Lin, Y.; Lin, J. 4D printing of a self-morphing polymer driven by a swellable guest medium. Soft Matter 2018, 14, 765–772. [Google Scholar] [CrossRef] [PubMed]
- Schmidt-Nielsen, K. Animal Physiology: Adaptation and Environment; Cambridge University Press: Cambridge, UK, 1997. [Google Scholar]
- Koh, J.; Cho, K. Omegabot: Biomimetic inchworm robot using SMA coil actuator and smart composite microstructures (SCM). In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 1154–1159. [Google Scholar]
- Margheri, L.; Follador, M.; Cianchetti, M.; Mazzolai, B.; Laschi, C. Bio-inspired Design of an Artificial Muscular-Hydrostat Unit for Soft Robotic Systems. In Proceedings of the Conference on Biomimetic and Biohybrid Systems, Barcelona, Spain, 9–12 July 2012; pp. 375–376. [Google Scholar]
- Schubert, T.; Floreano, D. Variable stiffness material based on rigid low-melting-point-alloy microstructures embedded in soft poly(dimethylsiloxane) (PDMS). RSC Adv. 2013, 3, 24671–24679. [Google Scholar] [CrossRef]
- Shan, W.; Diller, S.; Tutcuoglu, A.; Majidi, C. Rigidity-tuning conductive elastomer. Smart Mater. Struct. 2015, 24, 065001. [Google Scholar] [CrossRef] [Green Version]
- McEvoy, M.; Correll, N. Shape Change Through Programmable Stiffness. In Experimental Robotics; Springer: Cham, Switzerland, 2016; Volume 109, pp. 893–907. [Google Scholar]
- Allen, E.; Taylor, L.; Swensen, J. Smart Material Composites for Discrete Stiffness Materials. In Proceedings of the Smart Material Composites for Discrete Stiffness Materials SMASIS, San Antonio, TX, USA, 10–12 September 2018. [Google Scholar]
- Gillespie, T.; Best, C.; Killpack, M. Simultaneous position and stiffness control for an inflatable soft robot. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1095–1101. [Google Scholar]
- Manti, M.; Cacucciolo, V.; Cianchetti, M. Stiffening in soft robotics: A review of the state of the art. IEEE Robot. Autom. Mag. 2016, 23, 93–106. [Google Scholar] [CrossRef]
- Magleby, S.; Greenberg, H.; Gong, M.; Howell, L. A Compliant Contact-aided Revolute Joint. Mech. Mach. Theory 2005, 40, 1273–1293. [Google Scholar]
- Magleby, S.; Greenberg, H.; Gong, M.; Howell, L. Origami and Compliant Mechanisms. In Proceedings of the Second International Symposium on Compliant Mechanisms, Delft, The Netherlands, 19–20 May 2011. [Google Scholar]
- Swensen, J.; Odhner, L.; Araki, B.; Dollar, A. Printing Three-Dimensional Electrical Traces in Additive Manufactured Parts for Injection of Low Melting Temperature Metals. J. Mech. Robot. 2015, 7, 021004. [Google Scholar] [CrossRef]
- Murray, R.M.; Li, Z.; Sastry, S.S.; Sastry, S.S. A Mathematical Introduction to Robotic Manipulation; CRC Press: Boca Raton, FL, USA, 1994. [Google Scholar]
- Howell, L.L. Compliant Mechanisms; John Wiley & Sons: Hoboken, NJ, USA, 2001. [Google Scholar]






© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Allen, E.A.; Swensen, J.P. Directional Stiffness Control Through Geometric Patterning and Localized Heating of Field’s Metal Lattice Embedded in Silicone. Actuators 2018, 7, 80. https://doi.org/10.3390/act7040080
Allen EA, Swensen JP. Directional Stiffness Control Through Geometric Patterning and Localized Heating of Field’s Metal Lattice Embedded in Silicone. Actuators. 2018; 7(4):80. https://doi.org/10.3390/act7040080
Chicago/Turabian StyleAllen, Emily A., and John P. Swensen. 2018. "Directional Stiffness Control Through Geometric Patterning and Localized Heating of Field’s Metal Lattice Embedded in Silicone" Actuators 7, no. 4: 80. https://doi.org/10.3390/act7040080
APA StyleAllen, E. A., & Swensen, J. P. (2018). Directional Stiffness Control Through Geometric Patterning and Localized Heating of Field’s Metal Lattice Embedded in Silicone. Actuators, 7(4), 80. https://doi.org/10.3390/act7040080