Figure 1.
Unrolled view of a one-pole pair permanent magnet rotor with one phase (a) of a motor winding and (b) of an electrodynamic bearing winding if the rotor is internal.
Figure 1.
Unrolled view of a one-pole pair permanent magnet rotor with one phase (a) of a motor winding and (b) of an electrodynamic bearing winding if the rotor is internal.
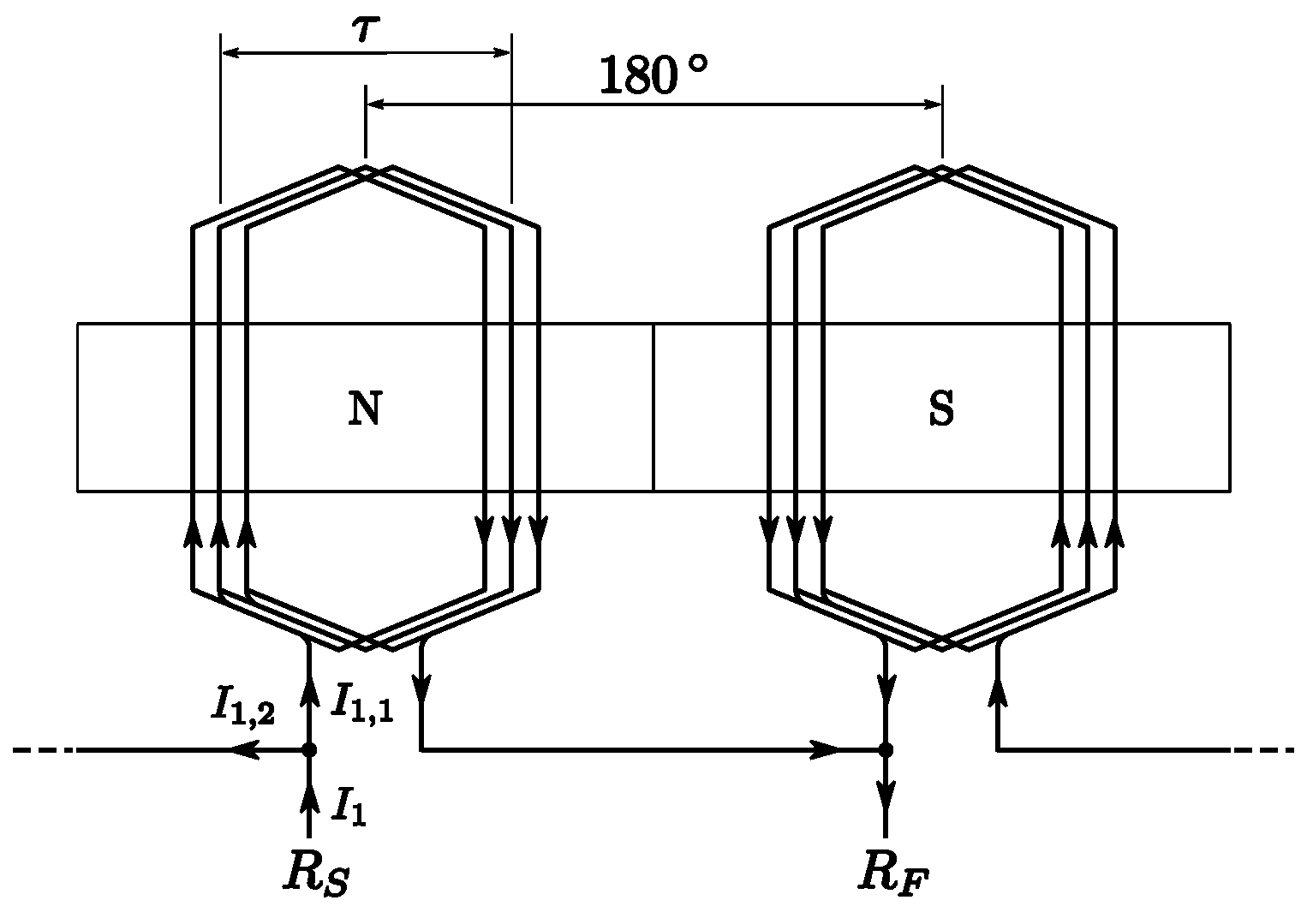
Figure 2.
Unrolled view of phase 1 of a multifunction winding performing both motor and passive electrodynamic magnetic bearing (EDB) centering functions for a one-pole pair internal permanent magnet rotor.
Figure 2.
Unrolled view of phase 1 of a multifunction winding performing both motor and passive electrodynamic magnetic bearing (EDB) centering functions for a one-pole pair internal permanent magnet rotor.
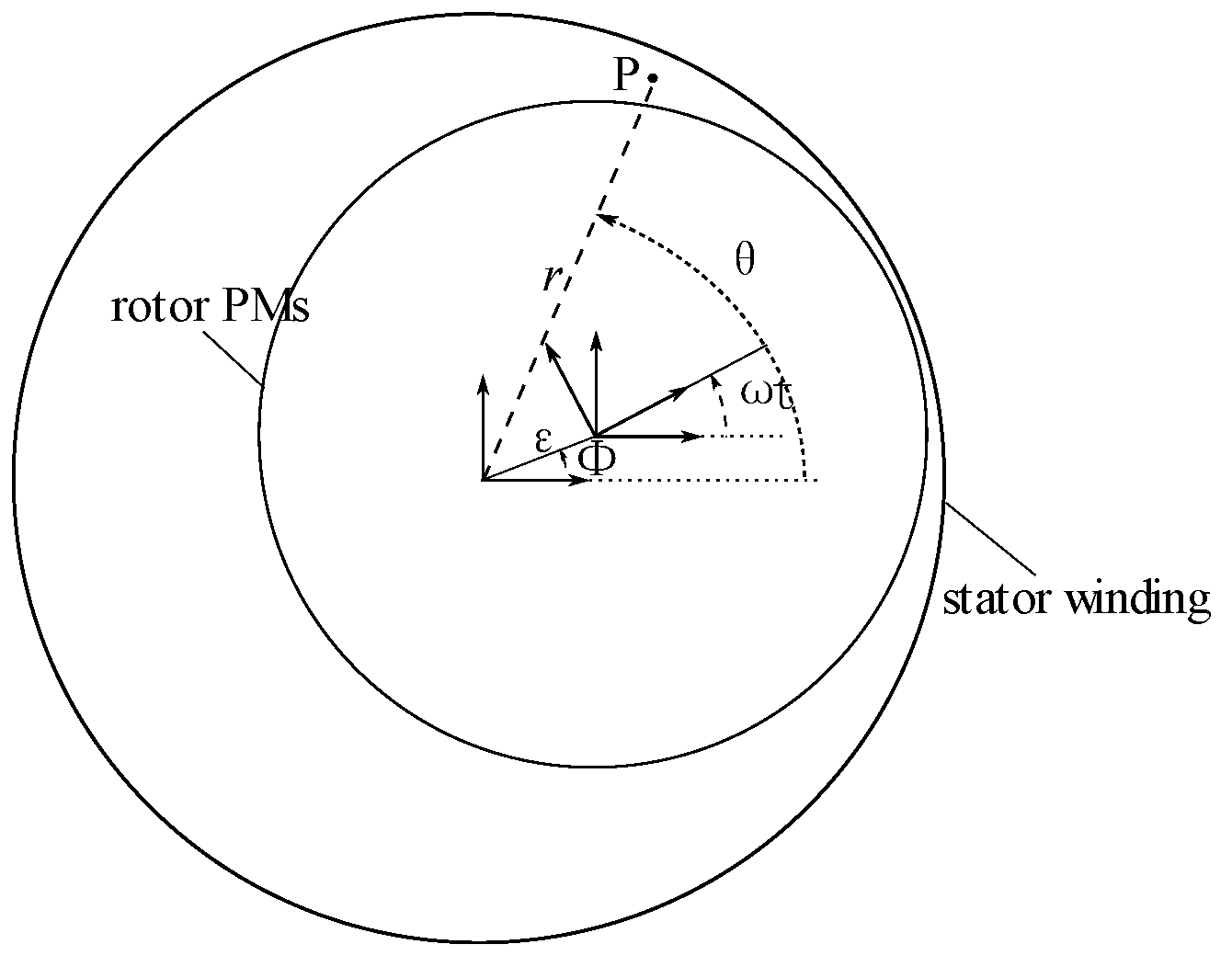
Figure 3.
Frames and coordinates used for the model.
Figure 3.
Frames and coordinates used for the model.
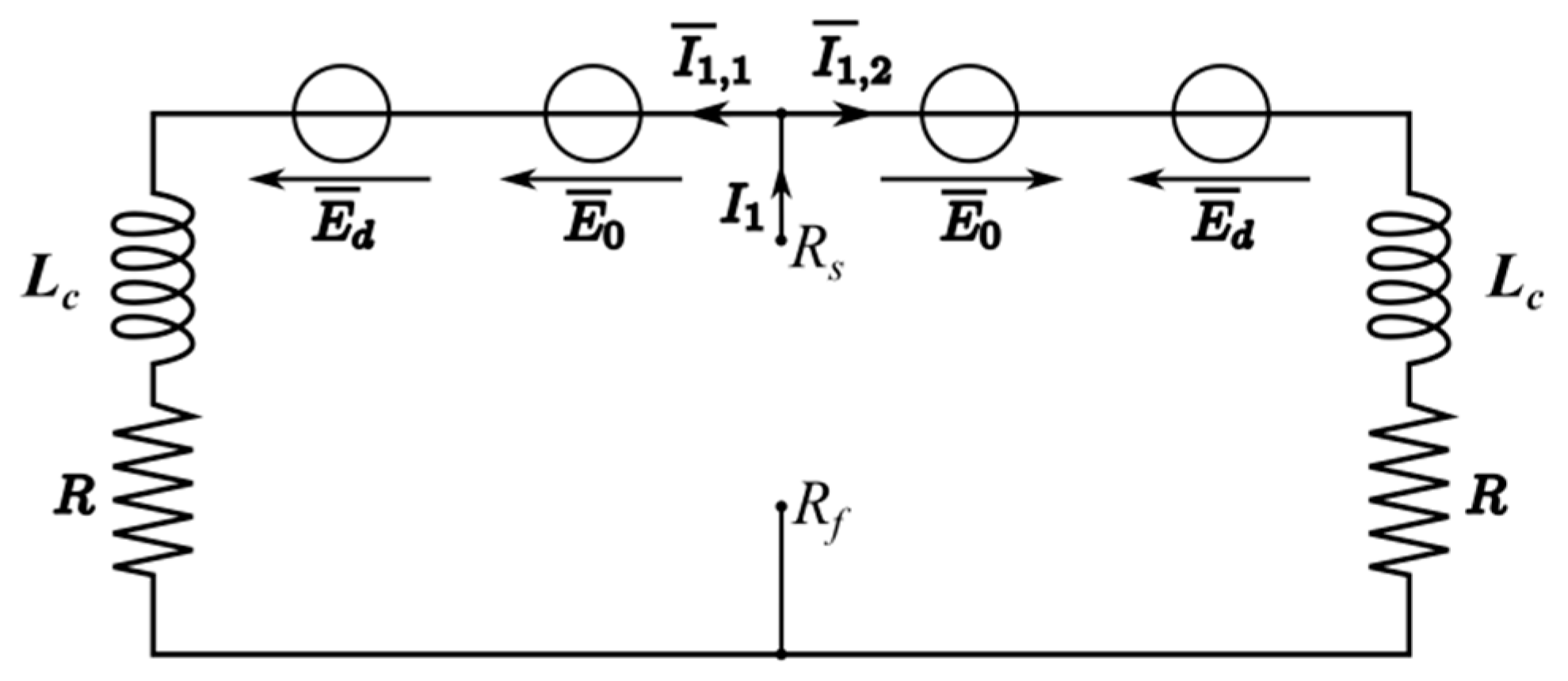
Figure 4.
Equivalent electrical circuit of phase 1 of a multifunction winding for a one-pole pair internal inductor, with R the resistance of one coil, Lc, the cyclic inductance of one coil, , the electromotive force (EMF) when the rotor is centered and , the EMF linked to the center shift.
Figure 4.
Equivalent electrical circuit of phase 1 of a multifunction winding for a one-pole pair internal inductor, with R the resistance of one coil, Lc, the cyclic inductance of one coil, , the electromotive force (EMF) when the rotor is centered and , the EMF linked to the center shift.
Figure 5.
Picture of (a) One stator coil, (b) the stator, (c), the rotor, and (d) the centering heteropolar electrodynamic bearing prototype, investigated for its torque generation and self-centering capacities.
Figure 5.
Picture of (a) One stator coil, (b) the stator, (c), the rotor, and (d) the centering heteropolar electrodynamic bearing prototype, investigated for its torque generation and self-centering capacities.
Figure 6.
Schematic view of the prototype, with the current directions inside each phase resulting in (a) an electrodynamic centering force and (b) a motor torque.
Figure 6.
Schematic view of the prototype, with the current directions inside each phase resulting in (a) an electrodynamic centering force and (b) a motor torque.
Figure 7.
Picture of the test bench for operation of the prototype in quasistatic conditions, with an external motor to drive the rotor.
Figure 7.
Picture of the test bench for operation of the prototype in quasistatic conditions, with an external motor to drive the rotor.
Figure 8.
Principle of experimental measurements of the EMF shown on equivalent electrical circuit.
Figure 8.
Principle of experimental measurements of the EMF shown on equivalent electrical circuit.
Figure 9.
(a) Measured voltages and (b) Fourier analysis of measured voltages on phase 1 for a spin speed of 6000 rpm and a rotor center shift of 1 mm (along the y-axis).
Figure 9.
(a) Measured voltages and (b) Fourier analysis of measured voltages on phase 1 for a spin speed of 6000 rpm and a rotor center shift of 1 mm (along the y-axis).
Figure 10.
Root Mean square (RMS) value of first harmonic measured induced voltages at the coil terminals of phase 1, as a function of a rotor displacement along the y-axis, while centered along the x-axis, for rotor spin speeds of 2400, 3600, 4800, and 6000 rpm.
Figure 10.
Root Mean square (RMS) value of first harmonic measured induced voltages at the coil terminals of phase 1, as a function of a rotor displacement along the y-axis, while centered along the x-axis, for rotor spin speeds of 2400, 3600, 4800, and 6000 rpm.
Figure 11.
RMS values of (a) motor electromotive force E0 and (b) bearing electromotive force Ed as a function of the rotor position in the x–y plane for spin speeds of 2400, 3600, 4800, and 6000 rpm.
Figure 11.
RMS values of (a) motor electromotive force E0 and (b) bearing electromotive force Ed as a function of the rotor position in the x–y plane for spin speeds of 2400, 3600, 4800, and 6000 rpm.
Figure 12.
RMS values of motor electromotive force E0 for each phase as a function of the rotor position (a) in the x axis and (b) in the y axis for spin speeds of 2400, 3600, 4800, and 6000 rpm.
Figure 12.
RMS values of motor electromotive force E0 for each phase as a function of the rotor position (a) in the x axis and (b) in the y axis for spin speeds of 2400, 3600, 4800, and 6000 rpm.
Figure 13.
RMS values of bearing electromotive force Ed for each phase as a function of the rotor position (a) in the x axis and (b) in the y axis for spin speeds of 2400, 3600, 4800, and 6000 rpm.
Figure 13.
RMS values of bearing electromotive force Ed for each phase as a function of the rotor position (a) in the x axis and (b) in the y axis for spin speeds of 2400, 3600, 4800, and 6000 rpm.
Figure 14.
Mesh of the 3D Finite Element (FE) magnetostatic model of the prototype.
Figure 14.
Mesh of the 3D Finite Element (FE) magnetostatic model of the prototype.
Figure 15.
Experimental and model predictions for the three phases (a) of the motor electromotive force E0 at spin speeds of 2400, 3600, 4800, and 6000 rpm and (b) of the bearing electromotive force Ed, at a spin speed of 6000 rpm as a function of the rotor position in the y-axis.
Figure 15.
Experimental and model predictions for the three phases (a) of the motor electromotive force E0 at spin speeds of 2400, 3600, 4800, and 6000 rpm and (b) of the bearing electromotive force Ed, at a spin speed of 6000 rpm as a function of the rotor position in the y-axis.
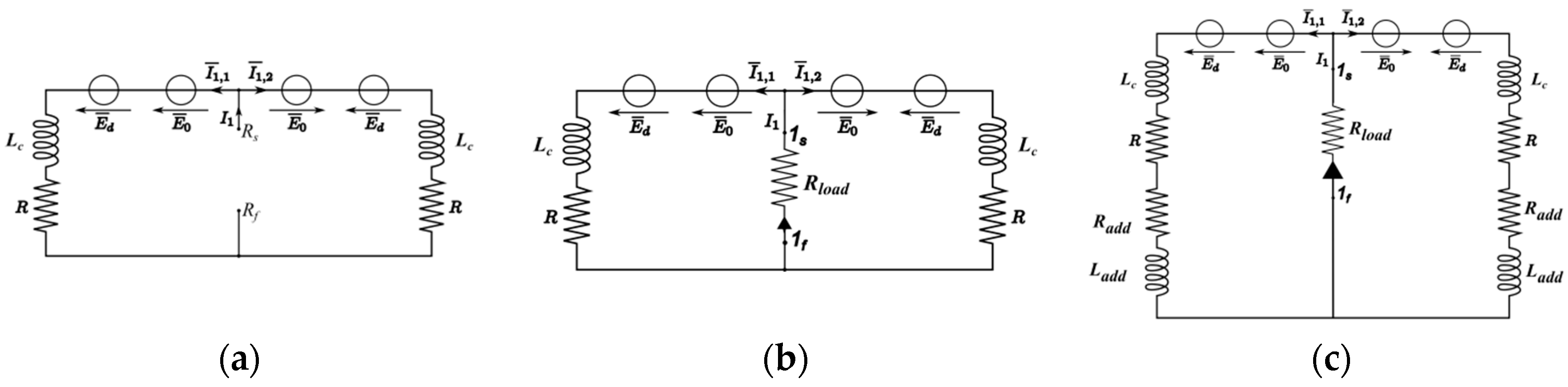
Figure 16.
Electrical circuit for the experimental measurements with (a) the motor connections in open circuit, (b) a resistive charge at motor connections, and (c) with additional inductors and a resistive charge at the motor connections.
Figure 16.
Electrical circuit for the experimental measurements with (a) the motor connections in open circuit, (b) a resistive charge at motor connections, and (c) with additional inductors and a resistive charge at the motor connections.
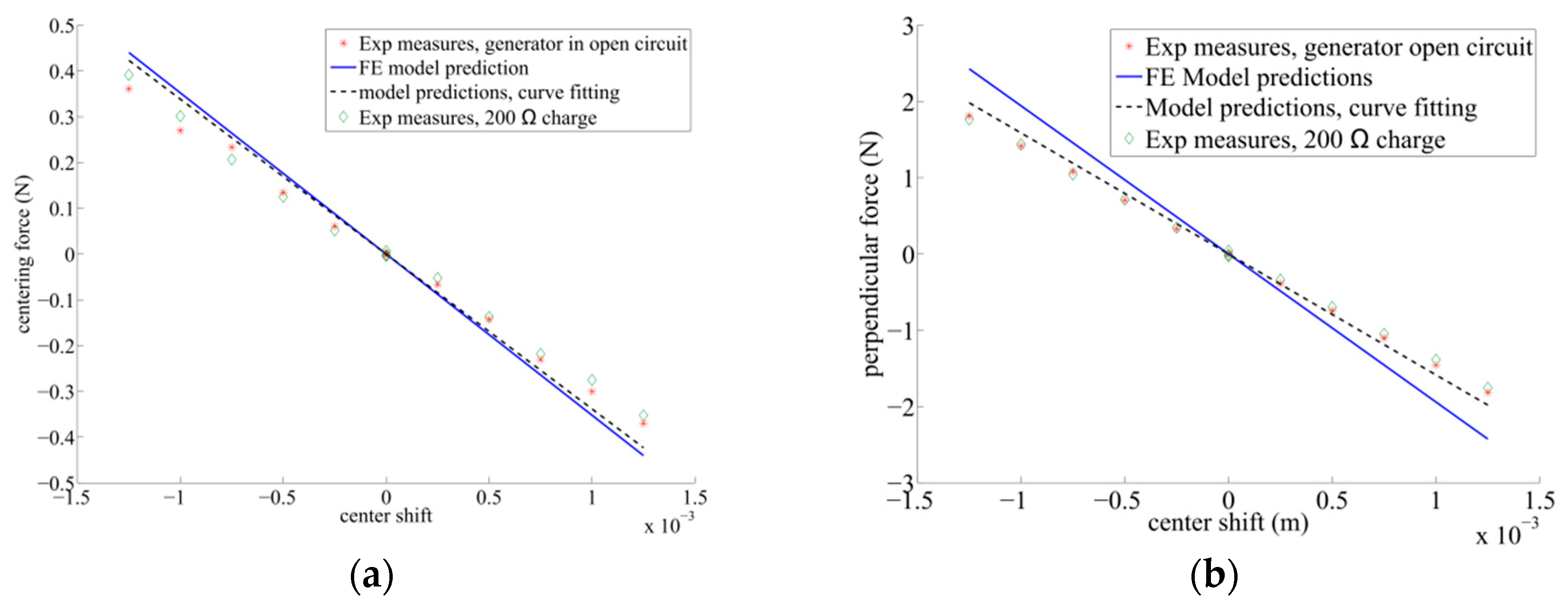
Figure 17.
Bearing forces as a function of the rotor displacement (x-axis) for a spin speed of 6000 rpm. Measures when the generator is left in open circuit, and when connected to a 200 Ω charge, and comparison with the model predictions; (a) restoring force and (b) destabilizing force.
Figure 17.
Bearing forces as a function of the rotor displacement (x-axis) for a spin speed of 6000 rpm. Measures when the generator is left in open circuit, and when connected to a 200 Ω charge, and comparison with the model predictions; (a) restoring force and (b) destabilizing force.
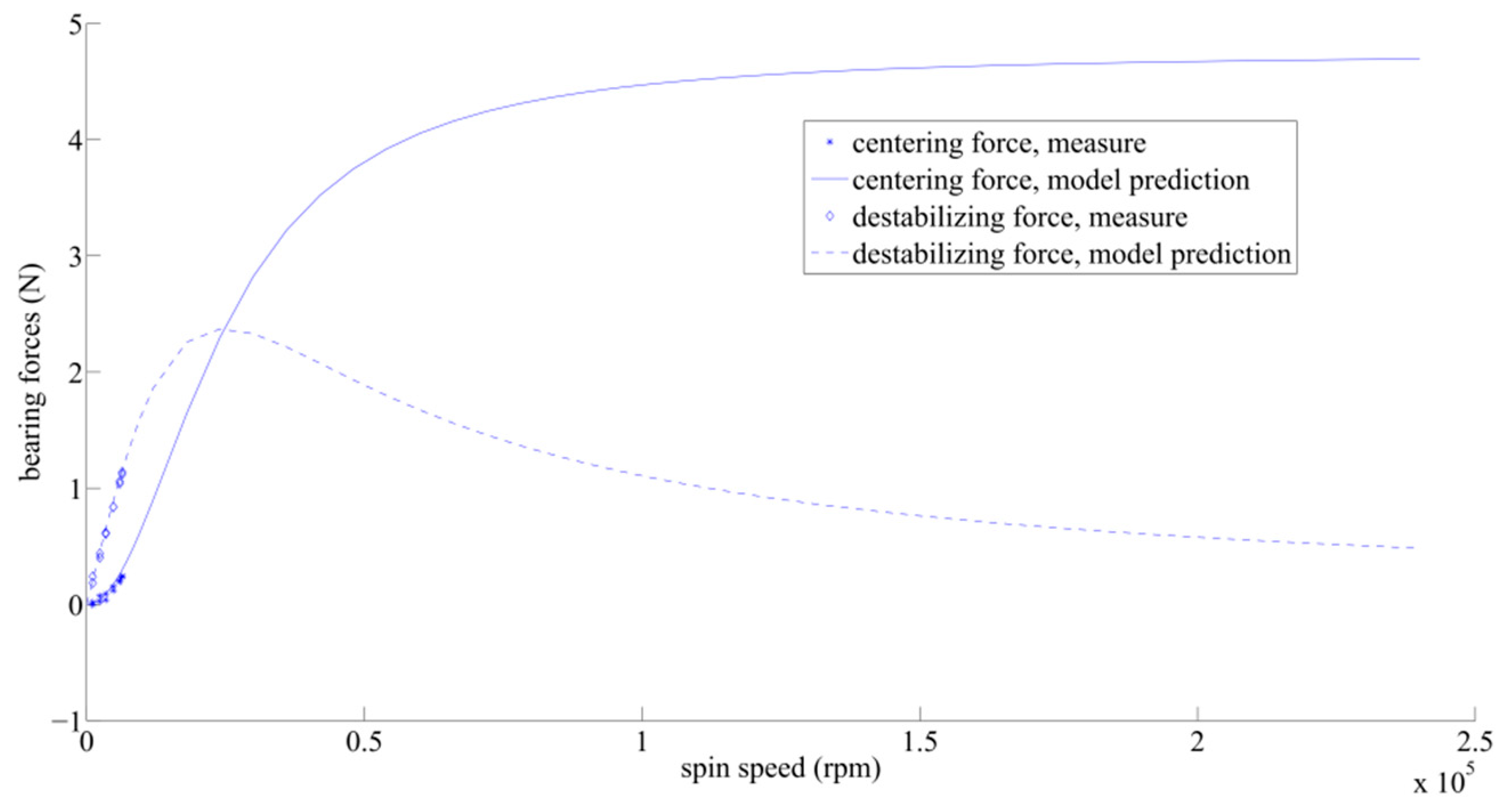
Figure 18.
Bearing forces as a function of the spin speed for a center shift of 0.75 mm, experimental measures, and model predictions with model parameters identified by curve fitting.
Figure 18.
Bearing forces as a function of the spin speed for a center shift of 0.75 mm, experimental measures, and model predictions with model parameters identified by curve fitting.
Figure 19.
(a) Restoring force and (b) destabilizing bearing forces as a function of the rotor displacement along the x-axis while centered along the y-axis for a spin speed of 4800 rpm. Measures with and without additional inductors when the generator is left in open circuit and when connected to a 200 Ω charge, and comparison to the model when its parameters are identified by curve fitting.
Figure 19.
(a) Restoring force and (b) destabilizing bearing forces as a function of the rotor displacement along the x-axis while centered along the y-axis for a spin speed of 4800 rpm. Measures with and without additional inductors when the generator is left in open circuit and when connected to a 200 Ω charge, and comparison to the model when its parameters are identified by curve fitting.
Figure 20.
Bearing forces when adding two additional inductors in series with each coil as a function of the center shift for a spin speed of 6600 rpm.
Figure 20.
Bearing forces when adding two additional inductors in series with each coil as a function of the center shift for a spin speed of 6600 rpm.
Figure 21.
Bearing forces when adding additional inductors in series with each coil as a function of the spin speed for a center shift of 0.75 mm.
Figure 21.
Bearing forces when adding additional inductors in series with each coil as a function of the spin speed for a center shift of 0.75 mm.
Figure 22.
Theoretical root locus for the electrodynamic bearing prototype dynamic behavior. (a) All roots; (b) influence of external damping; and (c) theoretical root locus for the electrodynamic bearing prototype dynamic behavior when adding two external inductors and influence of external damping.
Figure 22.
Theoretical root locus for the electrodynamic bearing prototype dynamic behavior. (a) All roots; (b) influence of external damping; and (c) theoretical root locus for the electrodynamic bearing prototype dynamic behavior when adding two external inductors and influence of external damping.
Figure 23.
Measured and predicted torque without additional inductors (a) as a function of the rotor displacement along the x-axis, while centered along the y-axis for a spin speed of 6000 rpm and (b) as a function of the spin speed when the rotor is centered. Measures when the generator is left in open circuit and when connected to a 200 Ω charge.
Figure 23.
Measured and predicted torque without additional inductors (a) as a function of the rotor displacement along the x-axis, while centered along the y-axis for a spin speed of 6000 rpm and (b) as a function of the spin speed when the rotor is centered. Measures when the generator is left in open circuit and when connected to a 200 Ω charge.
Figure 24.
Measured and predicted torque, when the generator is connected to a 200 Ω charge (a) as a function of the rotor displacement along the x-axis while centered along the y-axis for a spin speed of 6000 rpm and (b) as a function of the spin speed when the rotor is centered. Measurements were conducted with and without external inductors.
Figure 24.
Measured and predicted torque, when the generator is connected to a 200 Ω charge (a) as a function of the rotor displacement along the x-axis while centered along the y-axis for a spin speed of 6000 rpm and (b) as a function of the spin speed when the rotor is centered. Measurements were conducted with and without external inductors.
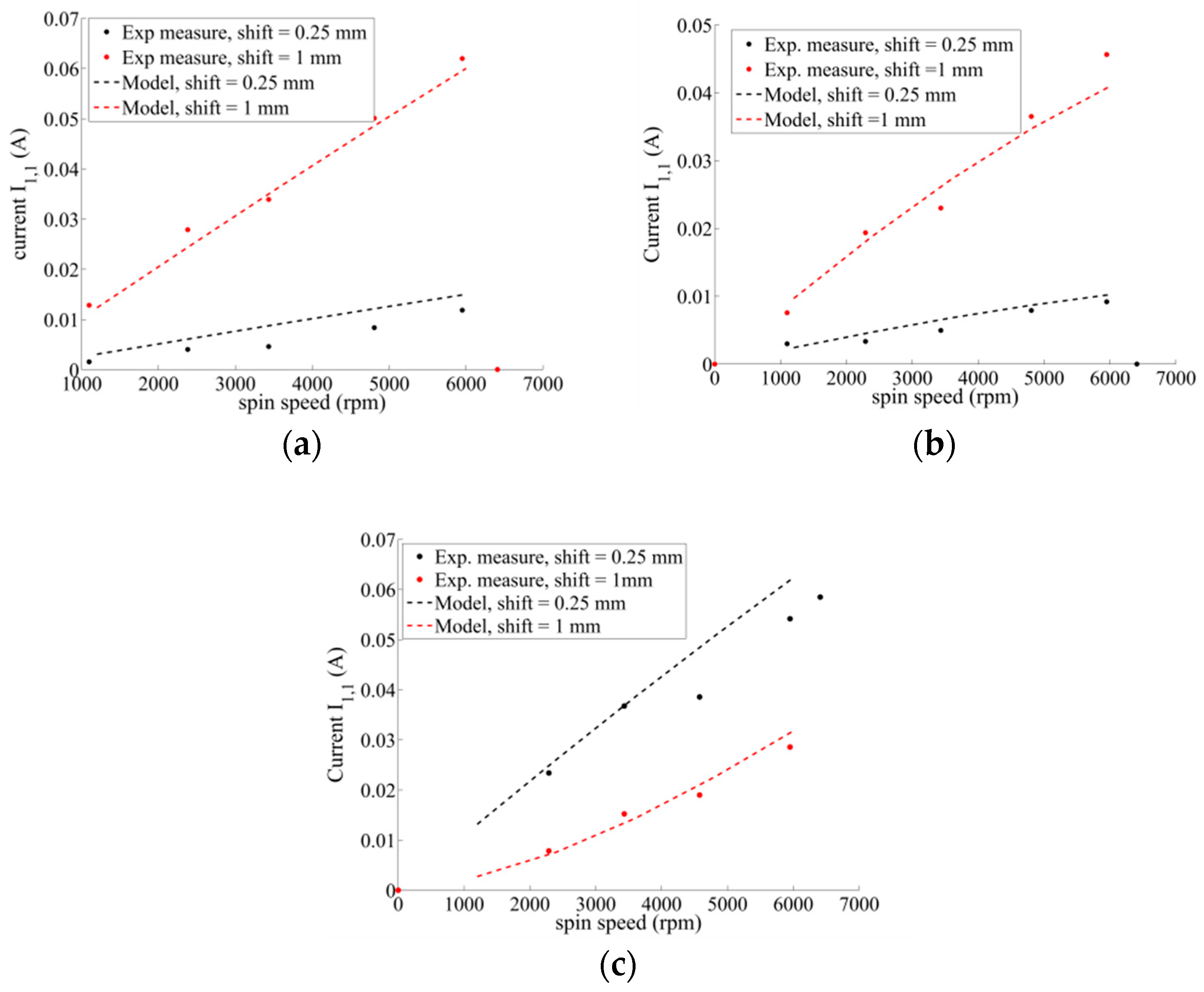
Figure 25.
Measured and predicted current in first coil of first phase for center shifts of 0.25 and 1 mm in the case of the electrodynamic bearing prototype with (a) motor terminals in open circuit, (b) motor terminals in open circuit with one additional inductor on each coil, and (c) motor terminals with resistive load of 200 Ω and one additional inductor on each coil.
Figure 25.
Measured and predicted current in first coil of first phase for center shifts of 0.25 and 1 mm in the case of the electrodynamic bearing prototype with (a) motor terminals in open circuit, (b) motor terminals in open circuit with one additional inductor on each coil, and (c) motor terminals with resistive load of 200 Ω and one additional inductor on each coil.
Figure 26.
Predicted current in the second coil of the first phase for center shifts of 0.25 and 1 mm in the case of the electrodynamic bearing prototype with motor terminals with resistive load of 200 Ω and one additional inductor on each coil.
Figure 26.
Predicted current in the second coil of the first phase for center shifts of 0.25 and 1 mm in the case of the electrodynamic bearing prototype with motor terminals with resistive load of 200 Ω and one additional inductor on each coil.
Table 1.
Characteristics of the prototype.
Table 1.
Characteristics of the prototype.
| Parameter | Value |
|---|
| Outer PM rotor diameter | 25 mm |
| Inner PM rotor diameter | 15 mm |
| Height of PM rotor | 50 mm |
| Rotor magnet | NdFeB |
| PM remanence | 1.3 T |
| Rotor shaft | Steel |
| Coil turns | 560 |
| Number of coils/phase | 2 |
| Number of phases | 3 |
| Coil wire diameter | 0.2 mm |
| Coil total height | 62 mm |
| Coil total width | 17 mm |
| Coil thickness | 4 mm |
| Stator inner diameter | 33 mm |
| Nominal airgap | 4 mm |
Table 2.
EMF model parameter identification.
Table 2.
EMF model parameter identification.
| Parameter | FE Identification | Exp. Curve Fitting | Relative Difference |
|---|
| 0.0473 | 0.0389 | 21.6% |
| 4.8442 | 4.1366 | 14.6% |
Table 3.
EMF model parameter identification.
Table 3.
EMF model parameter identification.
| Parameter | FE Value | Exp. Measure | Curve Fitting |
|---|
| 44.11 | 42.08 | 42.1 |
| 0.0127 | 0.0162 | 0.0143 |
Table 4.
Additional inductor values.
Table 4.
Additional inductor values.
| Case | | | |
|---|
| One additional inductor | 11.17 | 38.7 | 9600 |
| Two additional inductors | 17.01 | 79.1 | 6040 |





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}