A Comparison Study of a Novel Self-Contained Electro-Hydraulic Cylinder versus a Conventional Valve-Controlled Actuator—Part 1: Motion Control




Abstract
:1. Introduction
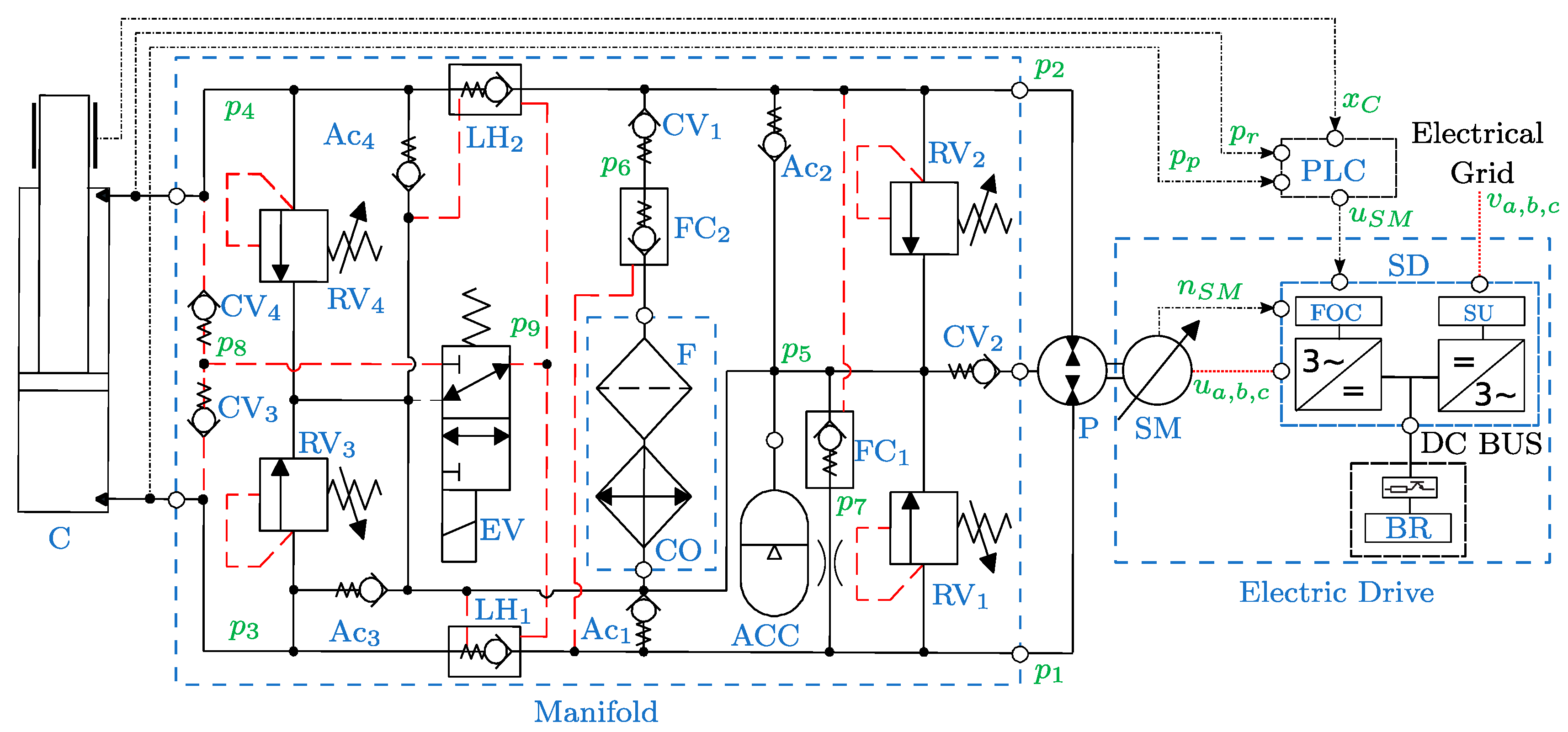
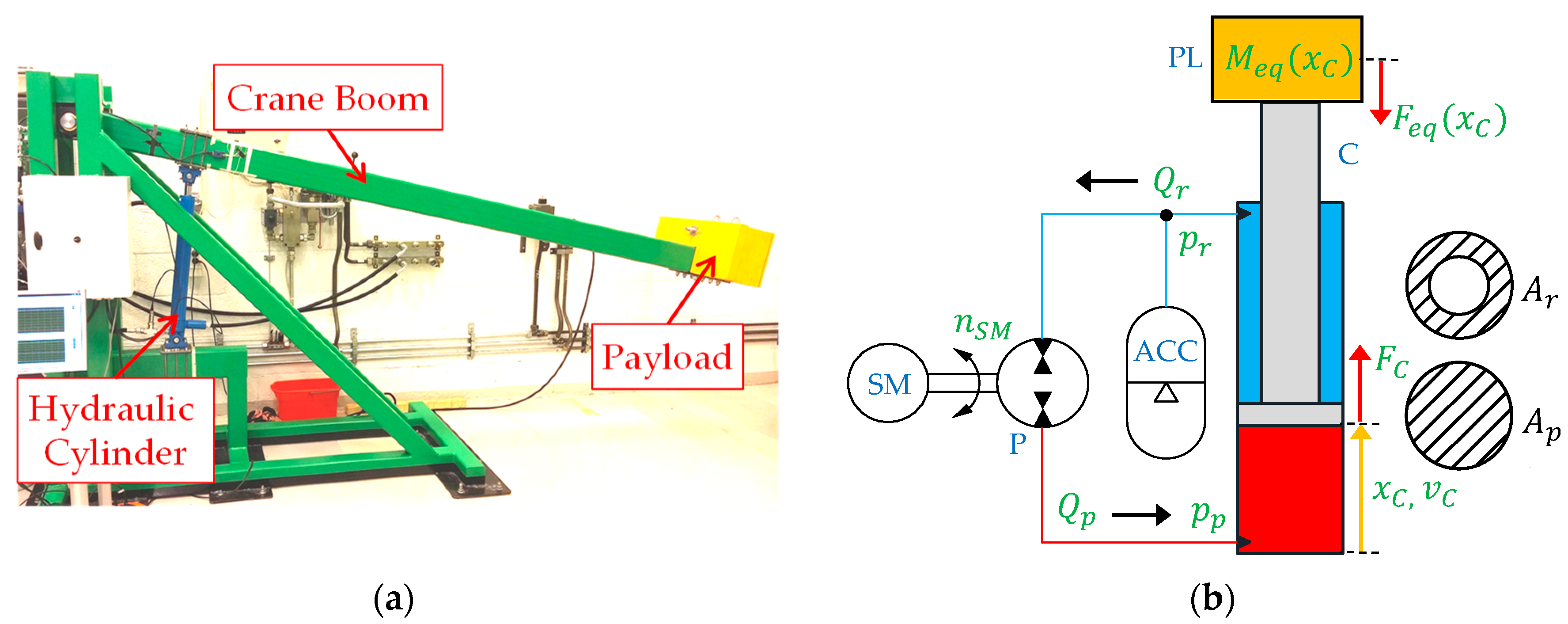
2. The Self-Contained Electro-Hydraulic Cylinder
2.1. Nonlinear Model of the System
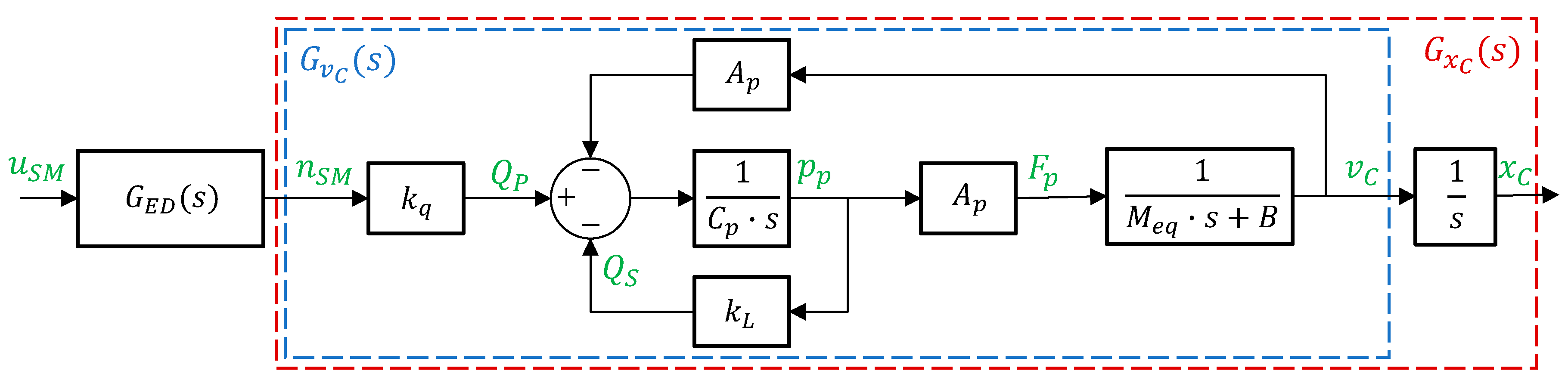
2.2. Linear Model of the System
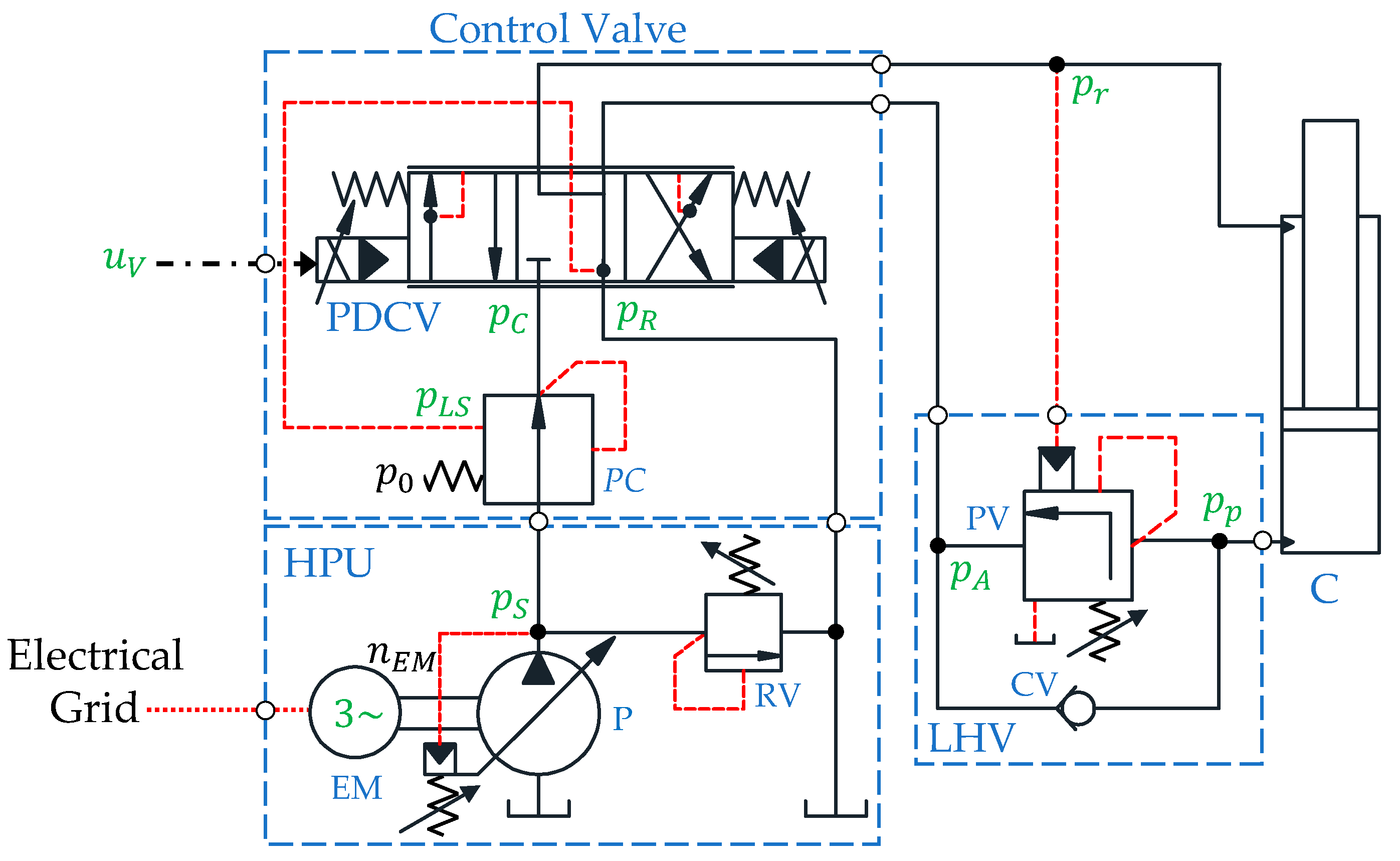
3. The Valve-Controlled System
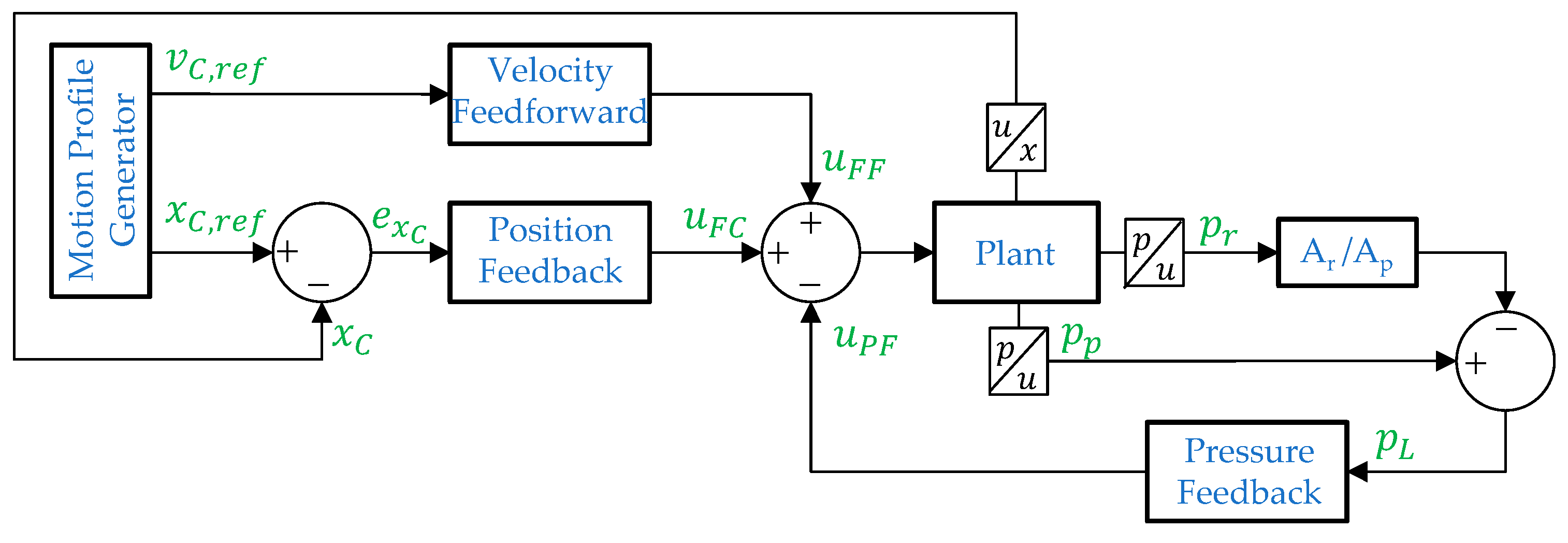
4. The Control Design
4.1. Control Parameters for the Self-Contained Electro-Hydraulic Cylinder
4.2. Control Parameters for the Valve-Controlled System
5. Results and Discussion
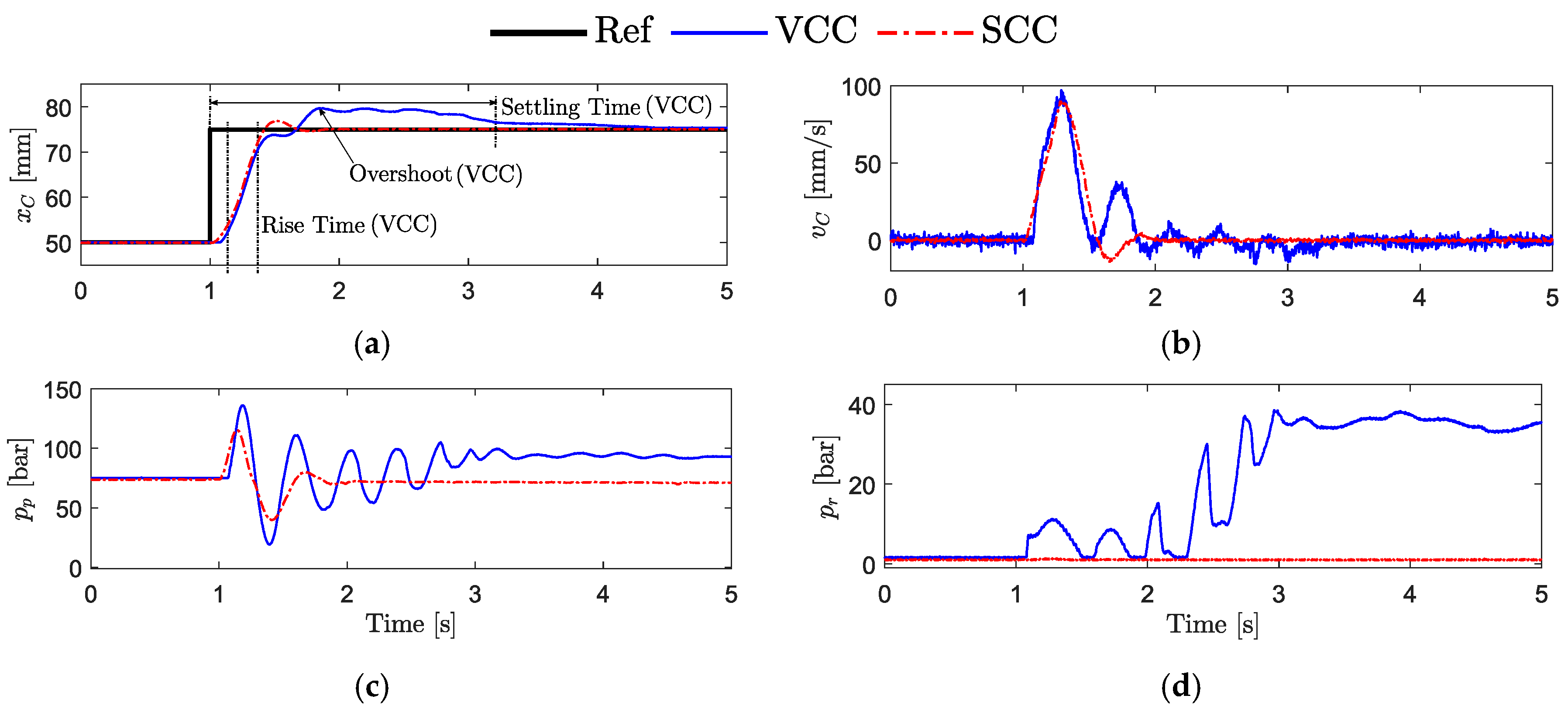
5.1. Closed-Loop Step Response
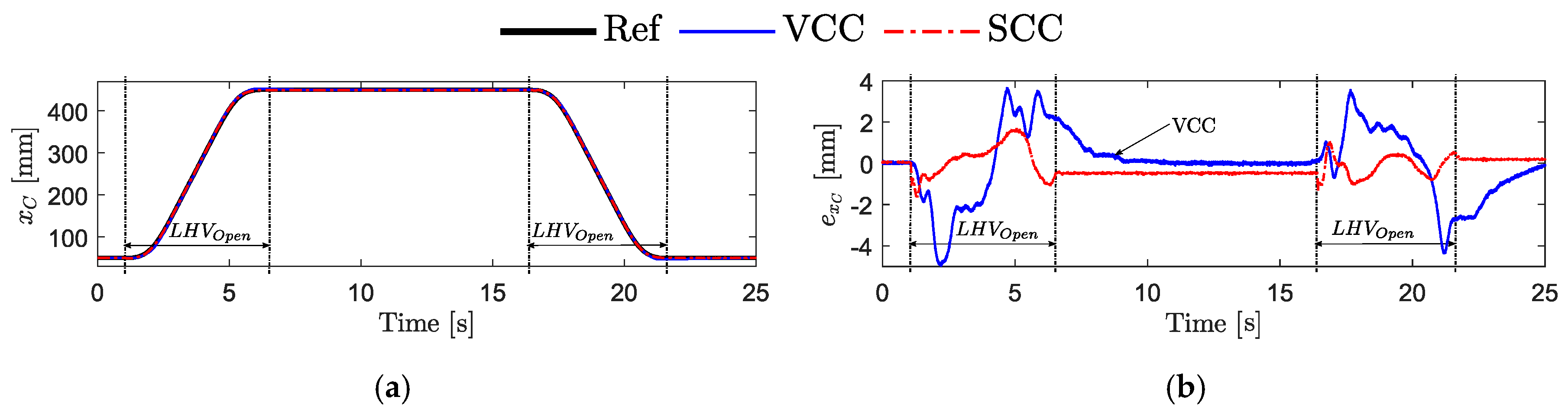
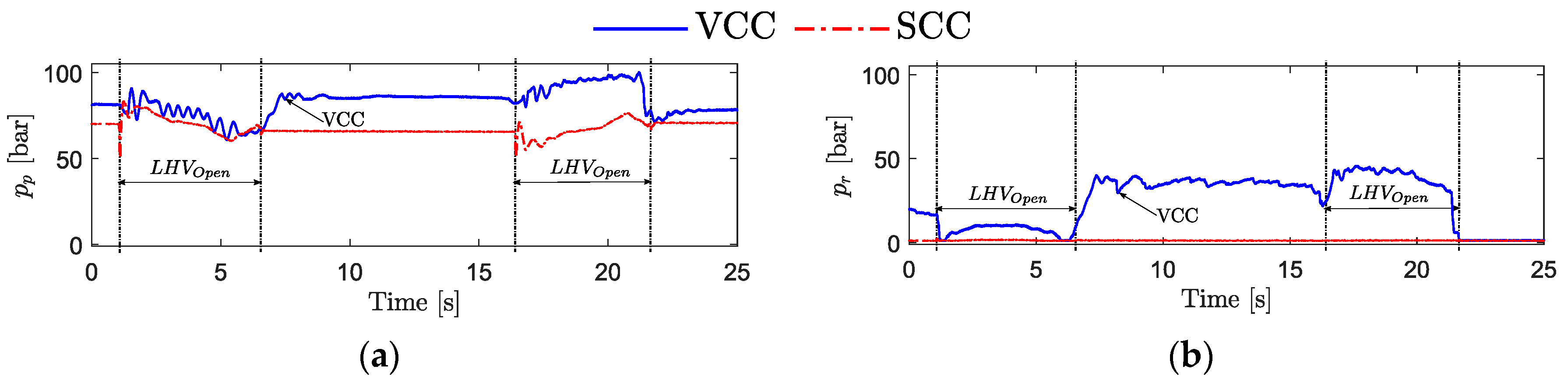
5.2. Representative Working Cycle
5.3. Scenarios with Reduced Payload
6. Conclusions
- The SCC achieves significantly better position tracking (up to 66% less tracking error and 61% less overshoot) and faster response (i.e., 10 ms faster rise time and 75% faster settling time);
- The active pressure feedback in the SCC reduces the pressure oscillations more effectively since the electric drive has about 95% higher bandwidth than the control valve.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Abbreviations | |
| AC | Alternating current |
| ACC | Accumulator |
| Ac | Anti-cavitation valve |
| ALH | Active load-holding |
| AV | Auxiliary valves |
| BR | Brake resistor |
| C | Hydraulic cylinder |
| CO | Oil cooler |
| CV | Check valve |
| DC | Direct current |
| ED | Electric drive |
| EM | Electric motor |
| EV | Electro-valve |
| F | Low pressure oil filter |
| FC | Flow compensation valve |
| FOC | Field-oriented control |
| Gm | Gain margin |
| HPU | Hydraulic power unit |
| HS | Hydraulic system |
| LHV | Load-holding valve |
| P | Axial piston machine (pump) |
| PC | Pressure compensator |
| PDCV | Proportional directional control valve |
| PI | Proportional and integral |
| PLC | Programmable logic controller |
| PLH | Passive load-holding |
| PV | Poppet valve |
| PWM | Pulse-width modulation |
| RMS | Root mean square |
| RV | Pressure-relief valve |
| SBC | Single-boom crane |
| SCC | Self-contained electro-hydraulic cylinder |
| SD | Servo-drive |
| SM | Servo-motor |
| SU | Supply unit |
| V | Control valve |
| VCC | Valve-controlled cylinder |
| Symbols | |
| Cylinder area on the piston-side | |
| Cylinder area on the rod-side | |
| Viscous friction coefficient | |
| Piston-side capacitance | |
| Rod-side capacitance | |
| Pump displacement | |
| Actuator’s piston position error | |
| Gain of the mechanical-hydraulic system including direct pressure feedback | |
| Gain of the direct pressure feedback | |
| Gain of the high-pass filtered pressure feedback | |
| Gain of the uncompensated mechanical-hydraulic system | |
| Combined leakage flow gain | |
| Integral controller gain | |
| Pump flow gain | |
| Proportional controller gain | |
| Equivalent mass | |
| Rotational speed of the servo-motor in revolutions per minute | |
| Internal leakage in the hydraulic cylinder | |
| Actuator’s flow demand | |
| Effective pump flow | |
| Rod-side flow | |
| Pump’s flow losses | |
| Fixed pressure-drop across the proportional directional control valve | |
| Piston-side pump pressure | |
| Rod-side pump pressure | |
| Pre-charge pressure of the accumulator | |
| Load-sensing pressure | |
| Actuator’s piston chamber pressure | |
| Actuator’s rod chamber pressure | |
| Return pressure | |
| Supply pressure | |
| On/off command to enable power to the servo-motor | |
| On/off command to open or close the 3/2 electro-valve | |
| Position feedback control signal | |
| Velocity feedforward control signal | |
| Pressure feedback control signal | |
| Commanded servo-motor speed | |
| Commanded opening of the control valve’s spool position | |
| Effective accumulator gas volume | |
| Actuator’s piston velocity | |
| Actuator’s piston velocity reference command | |
| Transmission lines’ volumes between the pump and the piston-side chamber | |
| Transmission lines’ volumes between the pump and the rod-side chamber | |
| Actuator’s piston position | |
| Actuator’s initial piston position | |
| Actuator’s piston position reference command | |
| Greek symbols | |
| Constant bulk modulus of the hydraulic fluid | |
| Adiabatic air constant | |
| Time constant of the high-pass filtered pressure feedback | |
| Phase angle | |
| Gain cross over frequency | |
| Natural-frequency of mechanical-hydraulic system including direct pressure feedback | |
| Natural-frequency of the electric drive | |
| Natural-frequency of the uncompensated mechanical-hydraulic system | |
| Phase cross over frequency | |
| Angular velocity of the servo-motor in radians per second | |
| Damping ratio of the mechanical-hydraulic system including direct pressure feedback | |
| Damping ratio of the electric drive | |
| Damping ratio of the uncompensated mechanical-hydraulic system | |
| Damping ratio of the complex conjugate pole pair in the transfer function | |
Appendix A


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| / | |||
Appendix B

Appendix B.1. Direct Pressure Feedback

| Gm (dB) | (rad/s) | Rise Time (s) | Settling Time (s) | Overshoot (mm/s) | |
| 14.0 | 0.077 | 5.39 | 85.02 | ||
| 108 | 14.7 | 0.11 | 0.55 | 16.29 | |
| 111 | 15.0 | 0.14 | 0.40 | 4.59 |
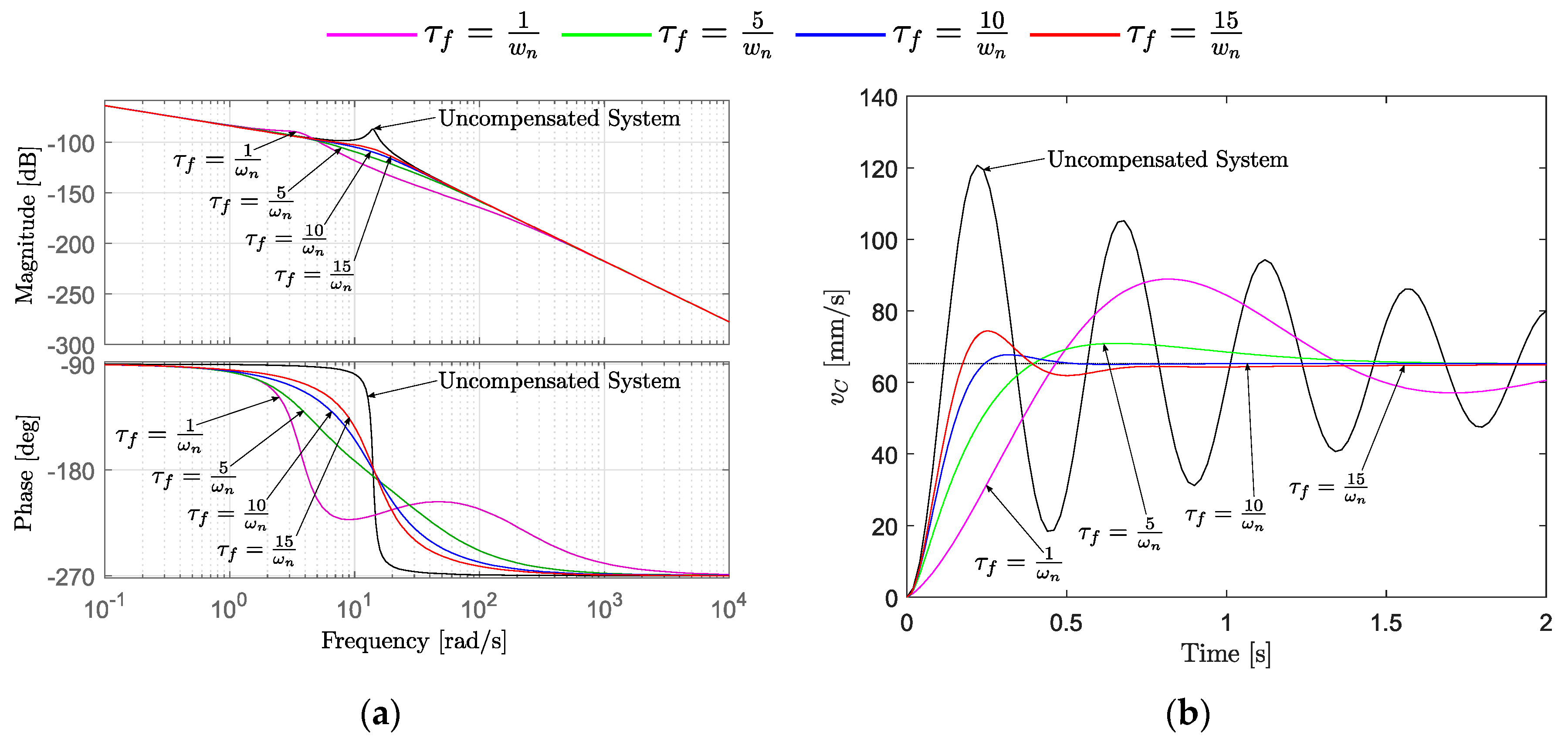
Appendix B.2. High-Pass Filtered Pressure Feedback

| Gm (dB) | (rad/s) | Rise Time (s) | Settling Time (s) | Overshoot (mm/s) | ||
|---|---|---|---|---|---|---|
| 4.06 | 0.319 | 0.34 | 2.93 | 36.14 | ||
| 113 | 12.2 | 0.864 | 0.27 | 1.27 | 8.61 | |
| 110 | 14.1 | 0.713 | 0.16 | 0.41 | 3.72 | |
| 107 | 14.3 | 0.486 | 0.12 | 0.67 | 13.99 |
References
- Michel, S.; Weber, J. Electrohydraulic Compact-drives for Low Power Applications considering Energy-efficiency and High Inertial Loads. In Proceedings of the 7th FPNI PhD Symposium on Fluid Power, Reggio Emilia, Italy, 27–30 June 2012; pp. 27–30. [Google Scholar]
- Minav, T.A.; Sainio, P.; Pietola, M. Direct Driven Hydraulic Drive without Conventional Oil Tank. In Proceedings of the ASME/BATH 2014 Symposium on Fluid Power and Motion Control, Bath, UK, 10–12 September 2014. [Google Scholar]
- Altare, G.; Vacca, A.; Richter, C. A Novel Pump Design for an Efficient and Compact Electro-Hydraulic Actuator. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2014. [Google Scholar]
- Altare, G.; Vacca, A. A design solution for efficient and compact electro-hydraulic actuators. Procedia Eng. 2015, 106, 8–16. [Google Scholar] [CrossRef] [Green Version]
- Jalayeri, E.; Imam, A.; Tomas, Z.; Sepehri, N. A throttle-less single-rod hydraulic cylinder positioning system: Design and experimental evaluation. Adv. Mech. Eng. 2015, 7, 1687814015583249. [Google Scholar] [CrossRef] [Green Version]
- Rexroth, B. Electrification and Digitalization: The Fitness Program for Hydraulics. 2015. Available online: https://www.boschrexroth.com/en/xc/products/product-groups/industrial-hydraulics/the-fitness-program-for-hydraulics (accessed on 21 September 2019).
- Helbig, A.; Boes, C. Electric Hydrostatic Actuation-modular building blocks for industrial applications. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016; pp. 93–102. [Google Scholar]
- Hagen, D.; Padovani, D.; Ebbesen, M.K. Study of a Self-Contained Electro-Hydraulic Cylinder Drive. In Proceedings of the 2018 Global Fluid Power Society PhD Symposium (GFPS), Samara, Russia, 18–20 July 2018. [Google Scholar]
- Padovani, D.; Ketelsen, S.; Hagen, D.; Schmidt, L. A Self-Contained Electro-Hydraulic Cylinder with Passive Load-Holding Capability. Energies 2019, 12, 292. [Google Scholar] [CrossRef] [Green Version]
- Weber, I.J.; Schneider, D.I.; Shabi, M.S.; Sitte, D.I.; Weber, D.I.; Willkomm, D.I.; Beck, D.I.; Fischer, D.I.; Ivantysyn, M.S.; Kolks, D.I.; et al. Novel System Architectures by Individual Drives. In Proceedings of the 10th International Fluid Power Conference, Dresden, Germany, 8–10 March 2016; pp. 29–62. [Google Scholar]
- Ketelsen, S.; Padovani, D.; Andersen, T.; Ebbesen, M.; Schmidt, L. Classification and Review of Pump-Controlled Differential Cylinder Drives. Energies 2019, 12, 1293. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, L.; Ketelsen, S.; Brask, M.H.; Mortensen, K.A. A class of energy efficient self-contained electro-hydraulic drives with self-locking capability. Energies 2019, 12, 1866. [Google Scholar] [CrossRef] [Green Version]
- Pedersen, H.C.; Schmidt, L.; Andersen, T.O.; Brask, M.H. Investigation of New Servo Drive Concept Utilizing Two Fixed Displacement Units. 9th JFPS Int. J. Fluid Power Syst. 2014, 8, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Michel, S.; Weber, J. Energy-efficient electrohydraulic compact drives for low power applications. In Proceedings of the ASME/BATH 2012 Symposium on Fluid Power and Motion Control, Arlington, VA, USA, 31 October–2 November 2012; pp. 93–107. [Google Scholar]
- Schmidt, L.; Roemer, D.B.; Pedersen, H.C.; Andersen, T.O. Speed-Variable Switched Differential Pump System for Direct Operation of Hydraulic Cylinders. In Proceedings of the ASME/BATH Symposium on Fluid Power and Motion Control, Chicago, IL, USA, 12–14 October 2015. [Google Scholar]
- Schmidt, L.; Ketelsen, S.; Padovani, D.; Mortensen, K.A. Improving the Efficiency and Dynamic Properties of a Flow Control Unit in a Self-Locking Compact Electro-Hydraulic Cylinder Drive. In Proceedings of the ASME/Bath Symposium on Fluid Power and Motion Control, Longboat Key, FL, USA, 7–9 October 2019. [Google Scholar]
- Schmidt, L.; Groenkjaer, M.; Pedersen, H.C.; Andersen, T.O. Position Control of an Over-Actuated Direct Hydraulic Cylinder Drive. Control Eng. Pract. 2017, 64, 1–14. [Google Scholar] [CrossRef]
- Hagen, D.; Padovani, D.; Choux, M. A Comparison Study of a Novel Self-Contained Electro-Hydraulic Cylinder versus a Conventional Valve-Controlled Actuator—Part 2: Energy Efficiency. Actuators 2019. on press. [Google Scholar]
- Hagen, D.; Padovani, D.; Choux, M. Enabling Energy Savings in Offshore Mechatronic Systems by using Self-Contained Cylinders. Model. Identif. Control 2019, 40, 89–108. [Google Scholar] [CrossRef]
- Hagen, D.; Padovani, D.; Choux, M. Design and Implementation of Pressure Feedback for Load-Carrying Applications with Position Control. In Proceedings of the Sixteenth Scandinavian International Conference on Fluid Power, Tampere, Finland, 22–24 May 2019. [Google Scholar]
- Bak, M.K. Model Based Design of Electro-Hydraulic Motion Control Systems for Offshore Pipe Handling Equipment. Ph.D. Thesis, University of Agder, Kristiansand S, Norway, 2014. [Google Scholar]
- Kjelland, M.B. Offshore Wind Turbine Access Using Knuckle Boom Cranes. Ph.D. Thesis, University of Agder, Kristiansand S, Norway, 2016. [Google Scholar]
- Phillips, C.L.; Harbor, R.D. Feedback Control System; Prentice-Hall International Editions: Upper Saddle River, NJ, USA, 1991. [Google Scholar]
- Mohieddine, J.; Kroll, A. Hydraulic Servo-Systems: Modelling, Identification and Control; Springer: London, UK, 2003. [Google Scholar]
- Krus, P.; Palmberg, J.O. Damping of mobile systems in machines with high inertia loads. In Proceedings of the JFPS International Symposium on Fluid Power; The Japan Fluid Power System Society: Tokyo, Japan, 1989; Volume 1989, pp. 63–70. [Google Scholar]
- Pedersen, H.C.; Andersen, T.O.; Hansen, M.R. Guidelines for Properly Adjusting Pressure Feedback in Systems with Over-Centre Valves. In Proceedings of the BATH/ASME Symposium on Fluid Power & Motion Control, Bath, UK, 7–9 September 2016. [Google Scholar]












| System | (deg) | (dB) | |||
|---|---|---|---|---|---|
| 45 | 29.3 | 6.68 | 29.17 | 19.49 |
| System | Rise Time (s) | Settling Time (s) | Overshoot (mm) |
|---|---|---|---|
| VCC | 0.27 | 2.23 | 4.65 |
| SCC | 0.26 | 0.57 | 1.83 |
| Velocity SP (mm/s) | 20 | 75 | 120 | |||
|---|---|---|---|---|---|---|
| System | VCC | SCC | VCC | SCC | VCC | SCC |
| RMS error (mm) | 0.17 | 0.25 | 1.26 | 0.37 | 1.5 | 0.52 |
| Load Case | Max Payload | Half Payload | No Payload | |||
|---|---|---|---|---|---|---|
| System | VCC | SCC | VCC | SCC | VCC | SCC |
| RMS error (mm) | 1.5 | 0.52 | 1.94 | 0.41 | 1.36 | 0.37 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hagen, D.; Padovani, D.; Choux, M. A Comparison Study of a Novel Self-Contained Electro-Hydraulic Cylinder versus a Conventional Valve-Controlled Actuator—Part 1: Motion Control. Actuators 2019, 8, 79. https://doi.org/10.3390/act8040079
Hagen D, Padovani D, Choux M. A Comparison Study of a Novel Self-Contained Electro-Hydraulic Cylinder versus a Conventional Valve-Controlled Actuator—Part 1: Motion Control. Actuators. 2019; 8(4):79. https://doi.org/10.3390/act8040079
Chicago/Turabian StyleHagen, Daniel, Damiano Padovani, and Martin Choux. 2019. "A Comparison Study of a Novel Self-Contained Electro-Hydraulic Cylinder versus a Conventional Valve-Controlled Actuator—Part 1: Motion Control" Actuators 8, no. 4: 79. https://doi.org/10.3390/act8040079
APA StyleHagen, D., Padovani, D., & Choux, M. (2019). A Comparison Study of a Novel Self-Contained Electro-Hydraulic Cylinder versus a Conventional Valve-Controlled Actuator—Part 1: Motion Control. Actuators, 8(4), 79. https://doi.org/10.3390/act8040079