Chopstick Robot Driven by X-shaped Soft Actuator



Abstract
:1. Introduction
2. Materials and Methods
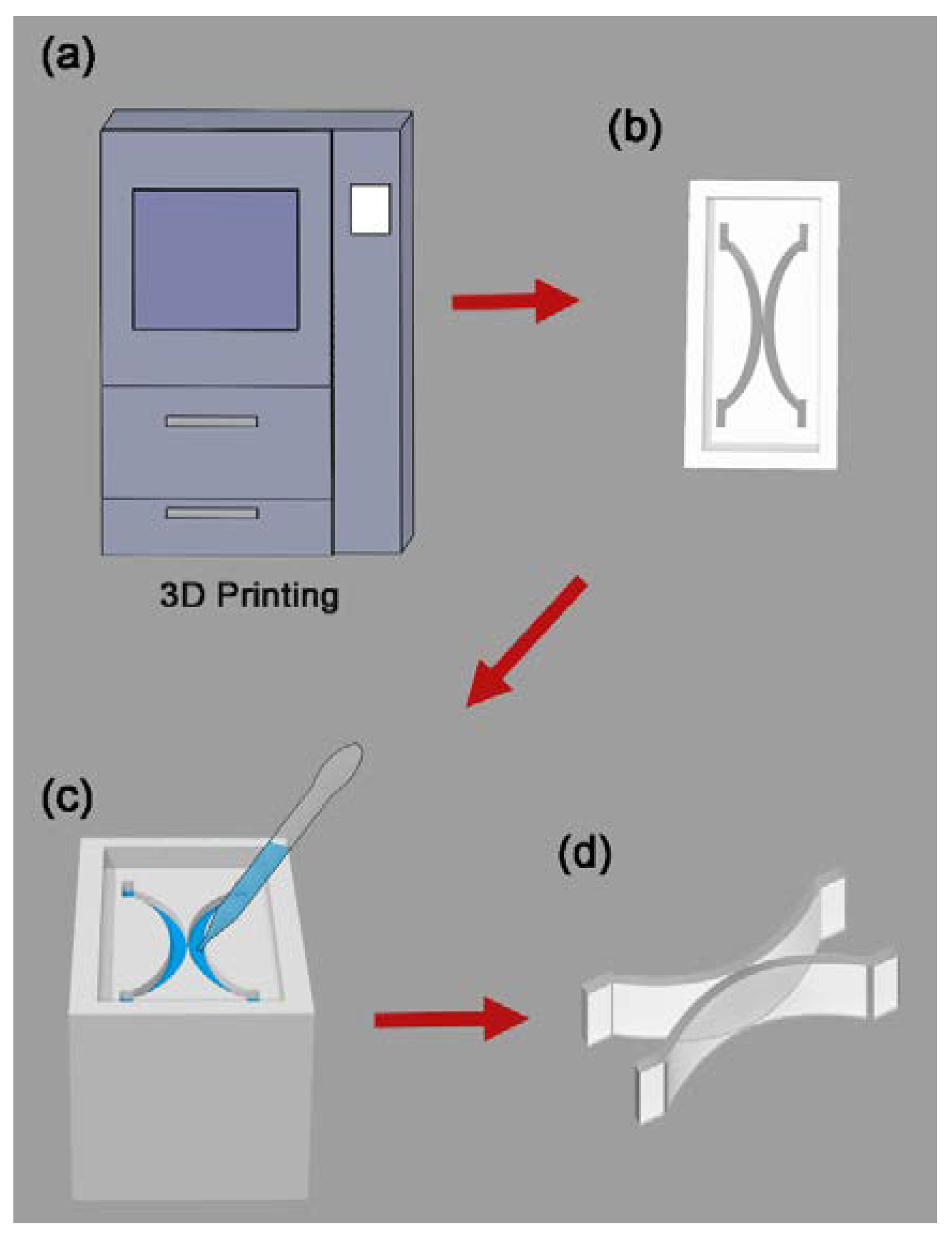
2.1. X-shaped Actuator Fabrication
2.2. Voltage Input
2.3. Chopstick Robot Configuration
3. Results
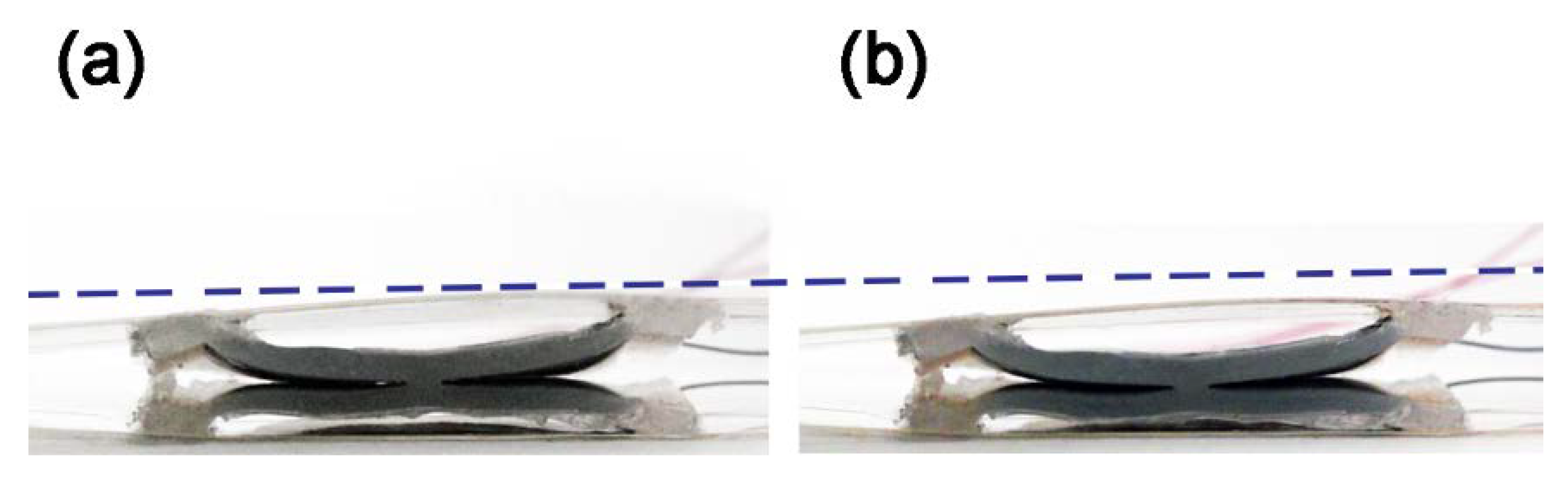
3.1. Motion of X-shaped Actuator
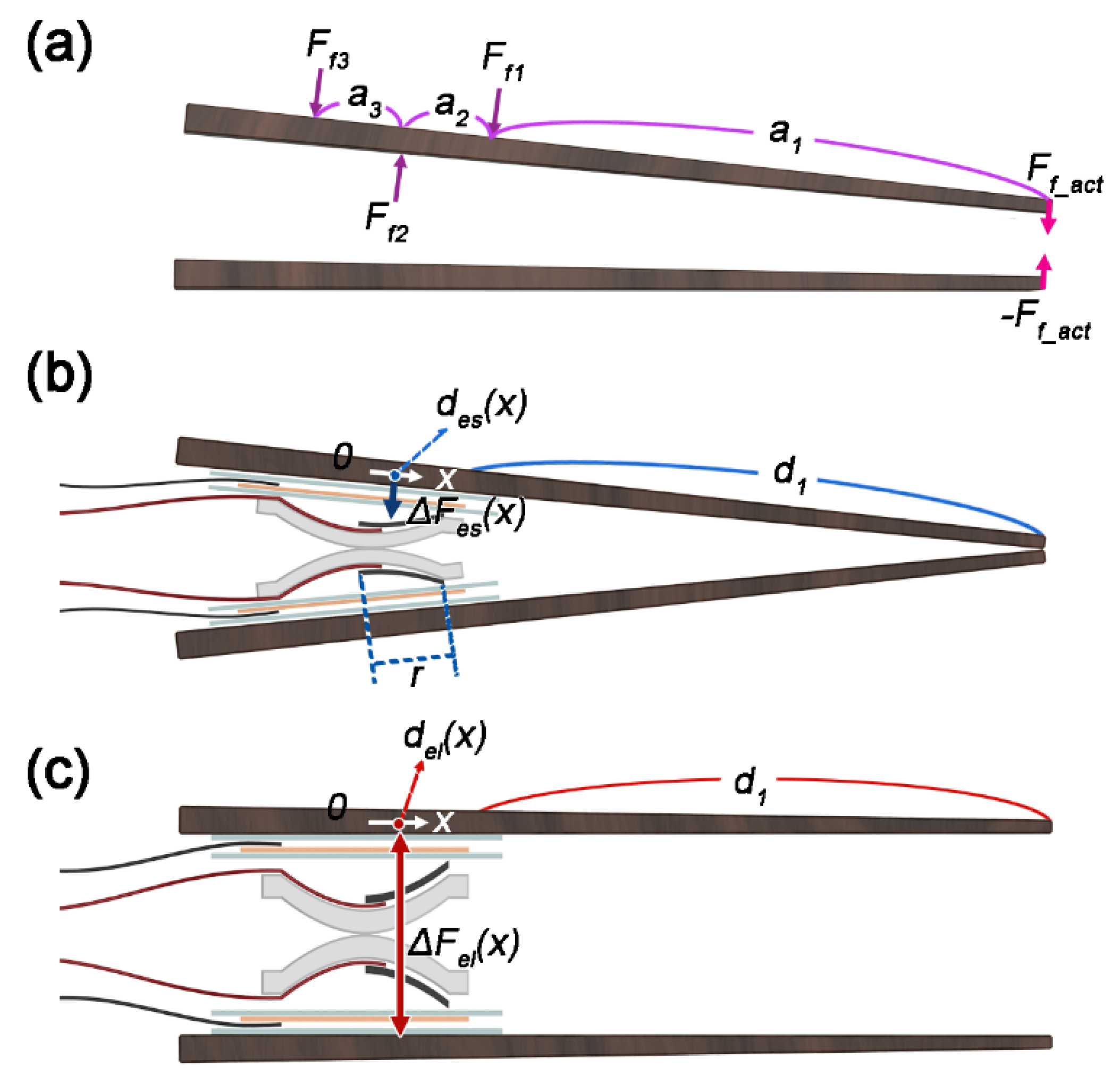
3.2. Operation Mechanism of Chopstick Robot
3.3. Chopstick Robot Tests with Various Objects
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fu, B.X. Asian noodles: History, classification, raw materials, and processing. Food Res. Int. 2008, 41, 888–902. [Google Scholar] [CrossRef]
- Chen, Y.-L. Effects of shape and operation of chopsticks on food-serving performance. Appl. Ergon. 1998, 29, 233–238. [Google Scholar] [CrossRef]
- Chan, T. A study for determining the optimum diameter of chopsticks. Int. J. Ind. Ergon. 1999, 23, 101–105. [Google Scholar] [CrossRef]
- Oka, T.; Matsuura, D.; Sugahara, Y.; Solis, J.; Lindborg, A.-L.; Takeda, Y. Chopstick-type Gripper Mechanism for Meal-Assistance Robot Capable of Adapting to Size and Elasticity of Foods. In Proceedings of the IFToMM Symposium on Mechanism Design for Robotics, Udine, Italy, 31 August 2018; Springer: Udine, Italy; pp. 284–292. [Google Scholar]
- Kim, J.S.; Yeo, I.S.; Kim, S.O.; Kim, K.H. The Effects of Chopstick Action Observational Physical Training on the Improvement of Non-dominant Hands Fine Motor Functions. Int. J. Hum. Mov. Sci. 2012, 6, 143–152. [Google Scholar]
- Hsu, S.-H.; Wu, S.-P. An investigation for determining the optimum length of chopsticks. Appl. Ergon. 1991, 22, 395–400. [Google Scholar] [CrossRef]
- Chen, S.; Liang, J.; Lai, K.; Ting, Y.; Peng, Y.; Hsu, H.; Lai, K.; Su, F. Kinematics Analysis of Chopsticks Manipulation. In Proceedings of the World Congress on Medical Physics and Biomedical Engineering, Munich, Germany, 7–12 September 2009; Springer: Munich, Germany; pp. 410–413. [Google Scholar]
- Kitamura, Y.; Higashi, T.; Masaki, T.; Kishino, F. Virtual Chopsticks: Object Manipulation Using Multiple Exact Interactions. In Proceedings of the IEEE Virtual Reality, Houston, TX, USA, 13–17 March 1999; IEEE: Houston, TX, USA; pp. 198–204. [Google Scholar]
- Joseph, R.A.; Goh, A.C.; Cuevas, S.P.; Donovan, M.A.; Kauffman, M.G.; Salas, N.A.; Miles, B.; Bass, B.L.; Dunkin, B.J. “Chopstick” surgery: A novel technique improves surgeon performance and eliminates arm collision in robotic single-incision laparoscopic surgery. Surg. Endosc. 2010, 24, 1331–1335. [Google Scholar] [CrossRef] [PubMed]
- Ramadan, A.A.; Takubo, T.; Mae, Y.; Oohara, K.; Arai, T. Developmental process of a chopstick-like hybrid-structure two-fingered micromanipulator hand for 3-D manipulation of microscopic objects. IEEE Trans. Ind. Electron. 2009, 56, 1121–1135. [Google Scholar] [CrossRef]
- Colinjivadi, K.S.; Lee, J.-B.; Draper, R. Viable cell handling with high aspect ratio polymer chopstick gripper mounted on a nano precision manipulator. Microsyst. Technol. 2008, 14, 1627–1633. [Google Scholar] [CrossRef]
- Yamasaki, Y.; Tsumugiwa, T.; Yokogawa, R. Grasp and Transport control of a chopsticks-type robot. In Proceedings of the Fourth International Conference on Innovative Computing, Information and Control (ICICIC), Kaohsiung, Taiwan, 7–9 December 2009; IEEE: Kaohsiung, Taiwan; pp. 197–202. [Google Scholar]
- Tanikawa, T.; Arai, T.; Masuda, T. Development of micro manipulation system with two-finger micro hand. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Osaka, Japan, 8 November 1996; IEEE: Osaka, Japan; pp. 850–855. [Google Scholar]
- Pang, J. A Comparative Biomechanical Analysis of Independent Finger Movement–Between Skilled and Unskilled Chopsticks Users. Ph.D. Thesis, University of Massachusetts Lowell, Lowell, MA, USA, 2012. [Google Scholar]
- Lee, Y.-C.; Chen, Y.-L. An auxiliary device for chopsticks operation to improve the food-serving performance. Appl. Ergon. 2008, 39, 737–742. [Google Scholar] [CrossRef]
- Chen, Y.-L.; Lee, Y.-C. Effect of an auxiliary device for chopstick operations on the chopstick-use performance of foreign novices. Neuropsychiatry 2017, 7, 310–315. [Google Scholar] [CrossRef]
- Koshizaki, T.; Masuda, R. Control of a meal assistance robot capable of using chopsticks. In Proceedings of the 41st International Symposium on Robotics (ISR) and 6th German Conference on Robotics (ROBOTIK), Munich, Germany, 7–9 June 2010; VDE: Munich, Germany; pp. 1–6. [Google Scholar]
- Yamazaki, A.; Masuda, R. Autonomous foods handling by chopsticks for meal assistant robot. In Proceedings of the 7th German Conference on Robotics, Munich, Germany, 21–22 May 2012; VDE: Munich, Germany; pp. 1–6. [Google Scholar]
- Chepisheva, M.; Culha, U.; Iida, F. A biologically inspired soft robotic hand using chopsticks for grasping tasks. In International Conference on Simulation of Adaptive Behavior; Springer: Cham, Swizerland, 2016; pp. 195–206. [Google Scholar]
- Liang, X.; Yap, H.K.; Guo, J.; Yeow, R.C.H.; Sun, Y.; Chui, C.K. Design and characterization of a novel fabric-based robotic arm for future wearable robot application. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 367–372. [Google Scholar]
- Greer, J.D.; Morimoto, T.K.; Okamura, A.M.; Hawkes, E.W. Series pneumatic artificial muscles (sPAMs) and application to a soft continuum robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017. [Google Scholar]
- Lee, C.; Kim, M.; Kim, Y.J.; Hong, N.; Ryu, S.; Kim, H.J.; Kim, S. Soft robot review. Int. J. Control Autom. 2017, 15, 3–15. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft Robotic Grippers. Adv. Mat. 2018, 1707035. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Laschi, C.; Cianchetti, M. Soft robotics: New perspectives for robot bodyware and control. Front. Bioeng. Biotechnol. 2014, 2, 3. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Martinez, R.V.; Glavan, A.C.; Keplinger, C.; Oyetibo, A.I.; Whitesides, G.M. Soft actuators and robots that are resistant to mechanical damage. Adv. Funct. Mater. 2014, 24, 3003–3010. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Laschi, C.; Trimmer, B. Soft robotics: A bioinspired evolution in robotics. Trends Biotechnol. 2013, 31, 287–294. [Google Scholar] [CrossRef] [PubMed]
- Trivedi, D.; Rahn, C.D.; Kier, W.M.; Walker, I.D. Soft robotics: Biological inspiration, state of the art, and future research. Appl. Bionics Biomech. 2008, 5, 99–117. [Google Scholar] [CrossRef]
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467. [Google Scholar] [CrossRef] [Green Version]
- Tian, M.; Xiao, Y.; Wang, X.; Chen, J.; Zhao, W. Design and experimental research of pneumatic soft humanoid robot hand. In Robot Intelligence Technology and Applications 4; Springer: Basel, Switzerland, 2017; pp. 469–478. [Google Scholar]
- Zhou, X.; Majidi, C.; O’Reilly, O.M. Soft hands: An analysis of some gripping mechanisms in soft robot design. Int. J. Solids Struct. 2015, 64, 155–165. [Google Scholar] [CrossRef]
- She, Y.; Li, C.; Cleary, J.; Su, H.-J. Design and fabrication of a soft robotic hand with embedded actuators and sensors. J. Mech. Robot. 2015, 7, 021007. [Google Scholar] [CrossRef]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, eaah3690. [Google Scholar] [CrossRef] [Green Version]
- Best, C.M.; Wilson, J.P.; Killpack, M.D. Control of a pneumatically actuated, fully inflatable, fabric-based, humanoid robot. In Proceedings of the IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Korea, 3–5 November 2015; IEEE: Seoul, Korea; pp. 1133–1140. [Google Scholar]
- Tolley, M.T.; Shepherd, R.F.; Mosadegh, B.; Galloway, K.C.; Wehner, M.; Karpelson, M.; Wood, R.J.; Whitesides, G.M. A resilient, untethered soft robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Song, K.; Lee, H.; Cha, Y. A V-Shaped actuator utilizing electrostatic force. Actuators 2018, 7, 30. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Zhu, Z. Flexible Actuators; Springer: Singapore, 2015; pp. 381–4110. [Google Scholar]
- Mirfakhrai, T.; Madden, J.D.; Baughman, R.H. Polymer artificial muscles. Mater. Today 2007, 10, 30–38. [Google Scholar] [CrossRef]
- Shankar, R.; Ghosh, T.K.; Spontak, R.J. Dielectric elastomers as next-generation polymeric actuators. Soft Matter 2007, 3, 1116–1129. [Google Scholar] [CrossRef]
- Bar-Cohen, Y. Electroactive polymers: Current capabilities and challenges. In Proceedings of the Smart Structures and Materials 2002: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 11 July 2002; International Society for Optics and Photonics: San Diego, CA, USA; pp. 1–7. [Google Scholar]
- Kong, J.; Tong, Y.; Sun, J.; Wei, Y.; Thitsartarn, W.; Jayven, C.C.Y.; Muiruri, J.K.; Wong, S.Y.; He, C. Electrically conductive PDMS-grafted CNTs-reinforced silicone elastomer. Compos. Sci. Technol. 2 2018, 159, 208–215. [Google Scholar] [CrossRef]
- Rosset, S.; Araromi, O.A.; Schlatter, S.; Shea, H.R. Fabrication process of silicone-based dielectric elastomer actuators. J. Vis. Exp. 2016, 108, e53423. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Dong, P.; Shi, T.; Tang, C.; Bian, C.; Chen, H. Elastomeric electrode and casting process for manufacturing multilayer dielectric elastomer actuators. Electroact. Polym. Actuators Devices (EAPAD) XX 2018, 10594, 1059414. [Google Scholar]
- Song, K.; Kim, S.H.; Jin, S.; Kim, S.; Lee, S.; Kim, J.-S.; Park, J.-M.; Cha, Y. Pneumatic actuator and flexible piezoelectric sensor for soft virtual reality glove system. Sci. Rep. 2019, 9, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Shintake, J.; Sonar, H.; Piskarev, E.; Paik, J.; Floreano, D. Soft pneumatic gelatin actuator for edible robotics. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: Vancouver, BC, Canada; pp. 6221–6226. [Google Scholar]
- Choi, H.R.; Jung, K.; Ryew, S.; Nam, J.-D.; Jeon, J.; Koo, J.C.; Tanie, K. Biomimetic soft actuator: Design, modeling, control, and applications. IEEE-ASME Trans. Mechatron. 2005, 10, 581–593. [Google Scholar] [CrossRef]
- Suzumori, K.; Asaad, S. A novel pneumatic rubber actuator for mobile robot bases. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Osaka, Japan, 8 November 1996; IEEE: Osaka, Japan; pp. 1001–1006. [Google Scholar]
- Phung, H.; Hoang, P.T.; Nguyen, C.T.; Nguyen, T.D.; Jung, H.; Kim, U.; Choi, H.R. Interactive haptic display based on soft actuator and soft sensor. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: Vancouver, BC, Canada; pp. 886–891. [Google Scholar]
- Sun, Y.; Guo, J.; Miller-Jackson, T.M.; Liang, X.; Ang, M.H.; Yeow, R.C.H. Design and fabrication of a shape-morphing soft pneumatic actuator: Soft robotic pad. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; IEEE: Vancouver, BC, Canada; pp. 6214–6220. [Google Scholar]
- Roche, E.T.; Wohlfarth, R.; Overvelde, J.T.; Vasilyev, N.V.; Pigula, F.A.; Mooney, D.J.; Bertoldi, K.; Walsh, C.J. A bioinspired soft actuated material. Adv. Mater. 2014, 26, 1200–1206. [Google Scholar] [CrossRef]
- Song, K.; Cha, Y. Hemispherical Cell-Inspired Soft Actuator. Front. Bioeng. Biotechnol. 2020, 8, 20. [Google Scholar] [CrossRef] [PubMed]
- Mayne, A.; Bayliss, S.; Barr, P.; Tobin, M.; Buckberry, L. Biologically interfaced porous silicon devices. Phys. Status Solidi (a) 2000, 182, 505–513. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
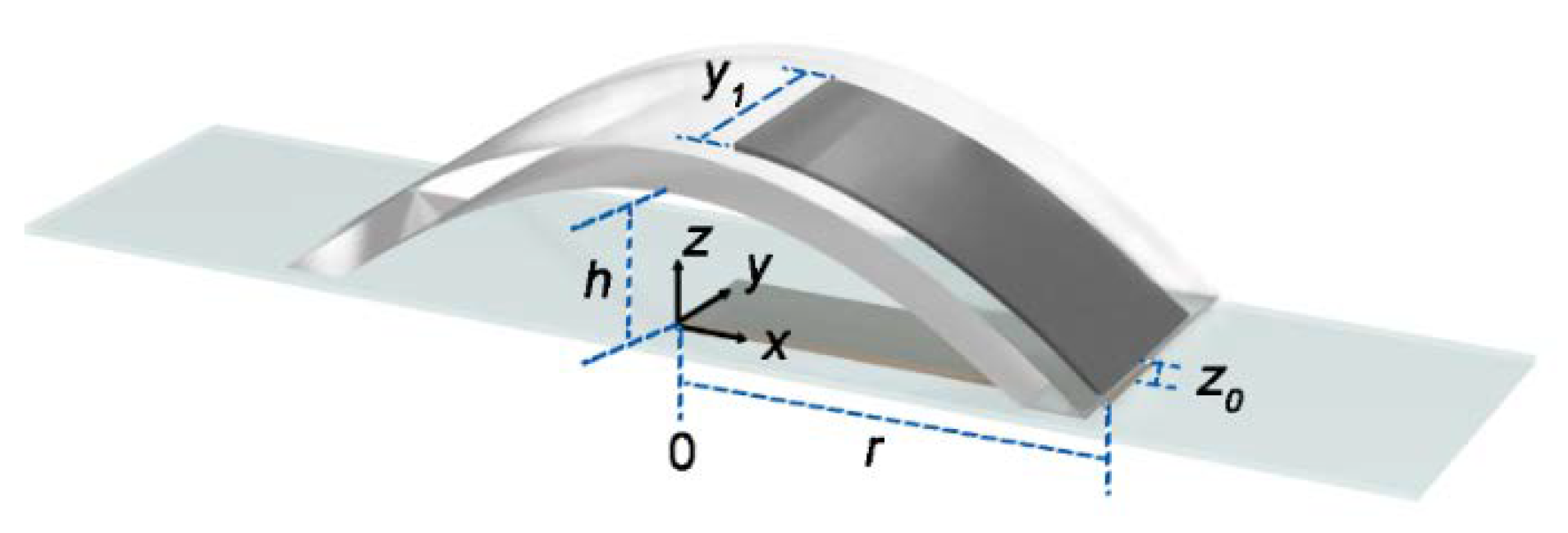
| Symbol | Value |
|---|---|
| ε0 | 8.85 × 10−12 F/m |
| Vd | 12 kV |
| z0 | 0.1 × 10−3 m |
| y1 | 10 × 10−3 m |
| r | 25 × 10−3 m |
| h | 8 × 10−3 m |
| d1 | 190 × 10−3 m |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, K.; Cha, Y. Chopstick Robot Driven by X-shaped Soft Actuator. Actuators 2020, 9, 32. https://doi.org/10.3390/act9020032
Song K, Cha Y. Chopstick Robot Driven by X-shaped Soft Actuator. Actuators. 2020; 9(2):32. https://doi.org/10.3390/act9020032
Chicago/Turabian StyleSong, Kahye, and Youngsu Cha. 2020. "Chopstick Robot Driven by X-shaped Soft Actuator" Actuators 9, no. 2: 32. https://doi.org/10.3390/act9020032
APA StyleSong, K., & Cha, Y. (2020). Chopstick Robot Driven by X-shaped Soft Actuator. Actuators, 9(2), 32. https://doi.org/10.3390/act9020032