3.1. Design of Fractional-Order Proportional-Derivative Control (FOPD) Surge Controller
The objective in the surge control design is to stabilize the compression system in the surge condition, where the equilibrium operating point (
,
) is beyond the surge line limit. As shown in
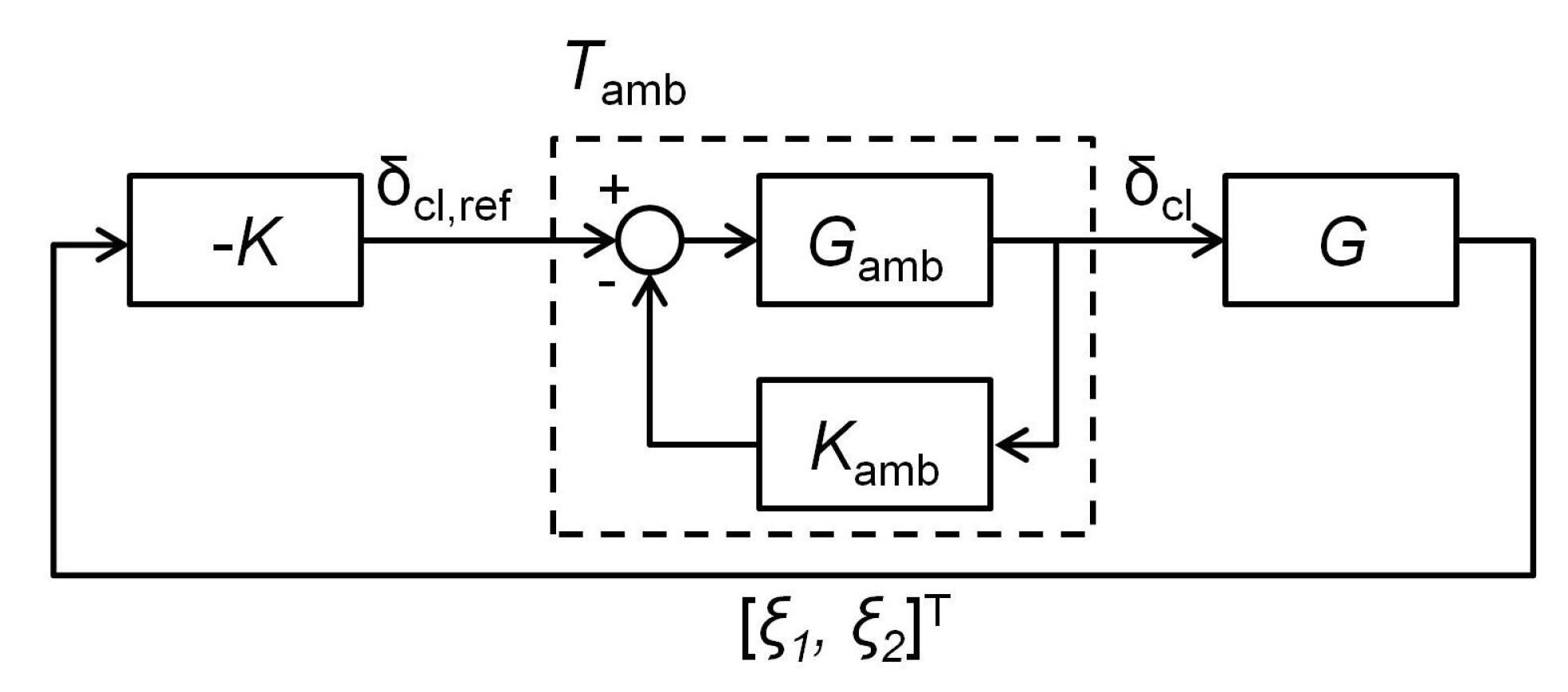
Figure 10, the two inputs of the surge controller
K from the compression system
G are the compressor mass flow rate
and the plenum pressure rise
. The controller output is the reference impeller tip clearance
, which is fed into the closed-loop thrust AMB system
[
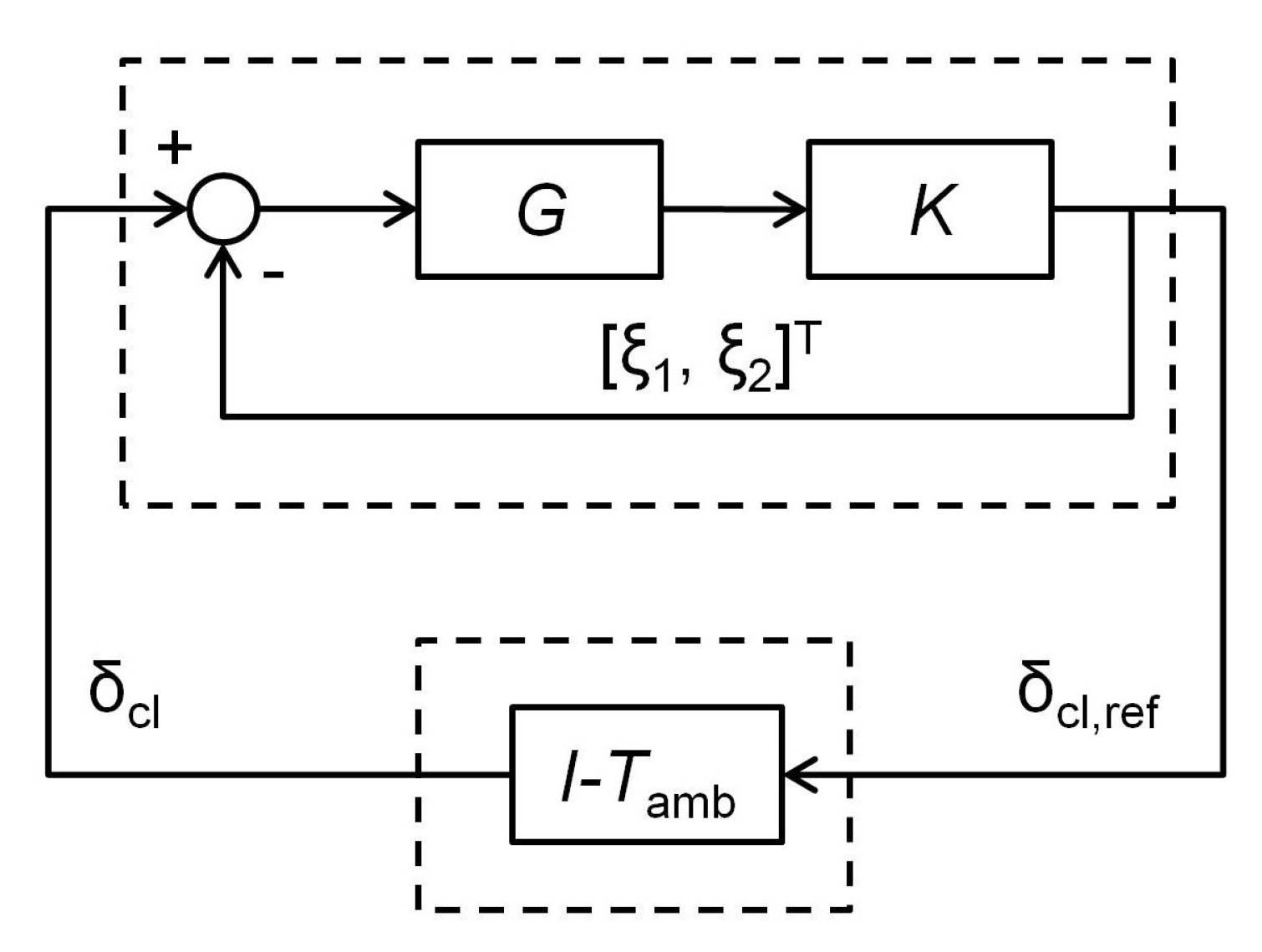
10]. The thrust AMB controller will track the desired tip clearance specified by the surge controller in order to induce an appropriate amount of pressure rise for surge stabilization. In the actual implementation, it is impossible to have perfect tracking by the thrust AMB due to external disturbances. This means that the performance of the surge controller will be degraded. Due to this limitation, the surge control design must take into account disturbances, which can impact the interaction between the surge and thrust AMB controllers. Moreover, Yoon et al. suggested in [
9] that the closed-loop system shown in
Figure 10 can be restructured as shown in
Figure 11. This way, the closed-loop dynamics of the compression system and the rotor/thrust AMB system are separated.
In this work, the surge controller for each input–output pair consists of a fractional-order proportional-derivative (FOPD) controller. The structure of the controller is shown in Equation (
5),
where
is the order of the derivative, while
and
are the controller gains. Additionally, there is a second-order low-pass filter
and a notch filter
to suppress the unwanted signal at the specified frequencies. The center frequency of the notch filter is placed at a frequency slightly lower than the critical frequency of the system (approximately 5–10 Hz lower) so that the designed controller can provide more damping at the critical frequency. The structure of the notch filter is
where
is the center frequency of the notch and
indicates the notch sharpness.
To obtain the best possible parameters of the FOPD controller, a proper tuning method is necessary. There are quite a few tuning methods for fractional-order controllers due to the increasing interest in adopting a fractional-order controller to achieve better performance. Fractional-order controller tuning methods have been studied for both linear and nonlinear systems. Recent fractional-order controller tuning methods for linear systems include the fractional-order model predictive frequency control of an islanded microgrid [
12], the fractional-order controller tuning based on frequency data [
13], and the parameter tuning for the fractional-order phase-lead compensator [
14]. There are also several tuning methods for nonlinear systems such as fractional-order controller tuning for the data-driven MIMO model-free reference tracking control with nonlinear state-feedback [
15] and the design of fractional-order sliding mode control for a class of second-order perturbed nonlinear systems [
16]. However, this study focuses on parameter tuning for a fractional-order PID controller, where the objective of the tuning emphasizes only on the controller gains and orders. There are three main approaches to fractional-order PID controller tuning—the analytical, rule-based, and numerical approaches. The analytical tuning methods for a fractional-order PID controller have been studied, such as the fractional-order PI controller applied to the traction system of an electric vehicle [
17] and the tuning of fractional-order PID controllers based on integral performance criteria using Fourier series method [
18]. Several other analytical tuning methods can be found in [
19,
20,
21]. The rule-based tuning methods need to include an additional testing process such as relay feedback test before applying the auto-tuning [
22,
23]. The analytical and rule-based methods require that a plant is open-loop stable. Due to this limitation, this study emphasizes only on the numerical tuning methods since the compression system that is linearized to capture the surge phenomenon is open-loop unstable.
The numerical tuning methods for fractional-order PID controllers are mainly optimizing the specified objectives by adjusting controller gains and orders. Popular optimization algorithms used in numerical tuning methods are evolutionary algorithms including Genetic Algorithm (GA), Particle Swarm Optimization (PSO), and Differential Evolution (DE) due to their capability to improve global minimum search. A detailed procedure for parameter tuning of these optimization algorithms can be found in [
10].
The objectives for the surge controller tuning are adopted from [
9] as follows, where we refer to the corresponding transfer functions as objective transfer functions.
Stability of closed-loop system: The closed-loop stability condition is derived from the Small Gain Theorem. The optimization goal is to have
1.
Robust stability condition:
Control effort according to the reference equilibrium operating point condition:
Transmission of the input disturbance to the plant output signal condition:
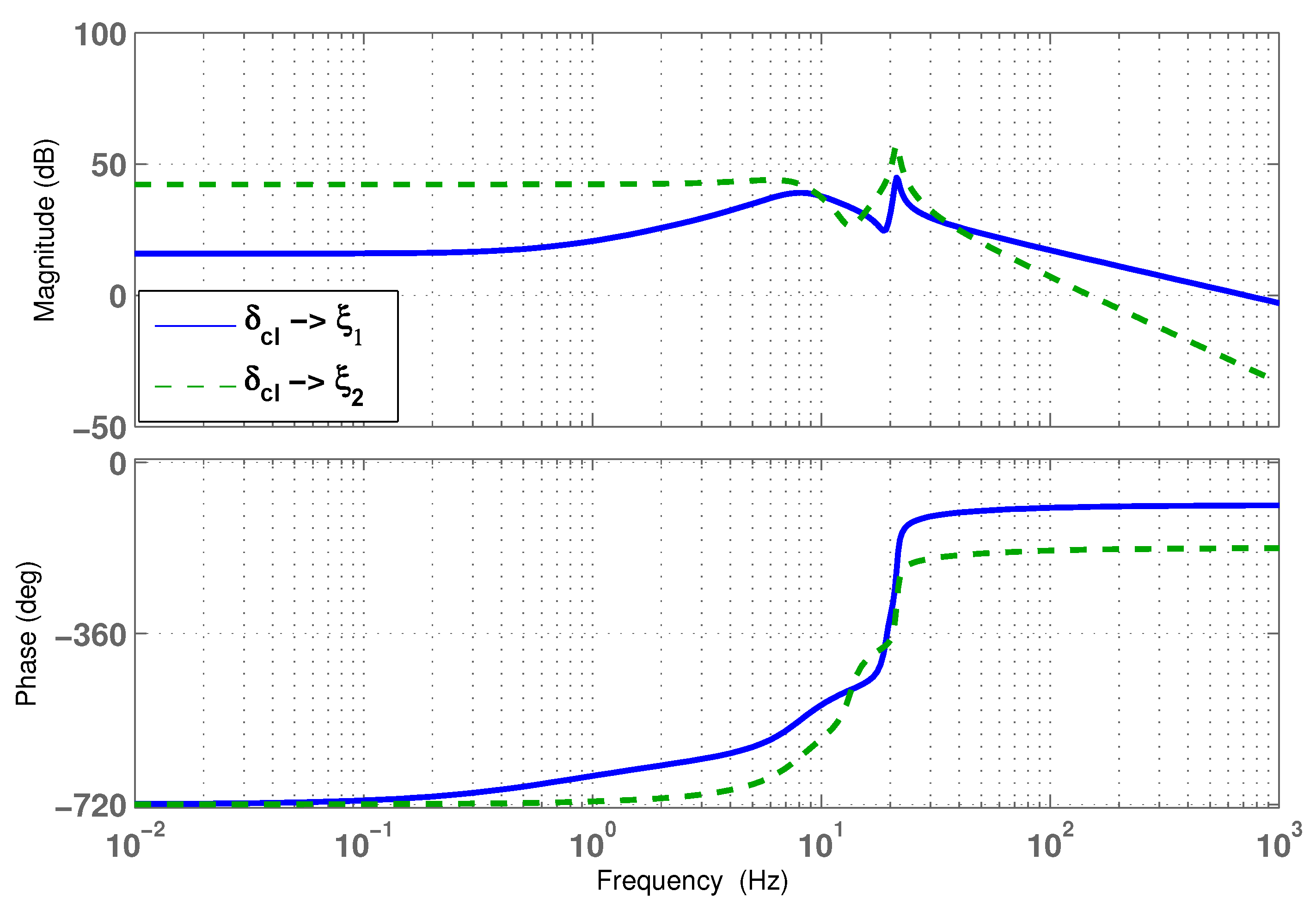
Closed-loop dynamics from the reference equilibrium operating point to the plant output signal condition:
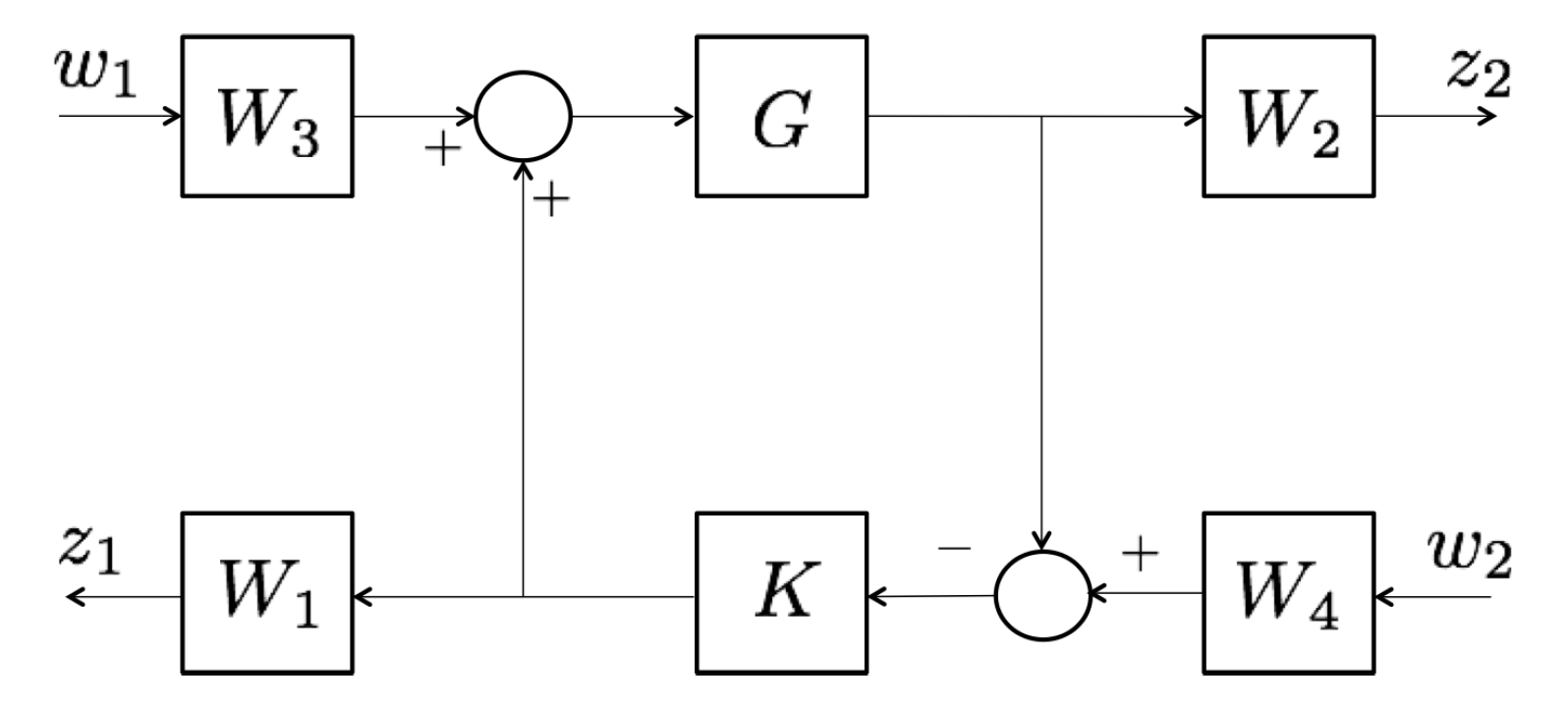
where
G is the transfer function of the compression system (
3a) and (3b), and the weighting functions—as shown in
Figure 12—are
Similar to the fractional-order rotor suspension control design in [
10], all five objective functions are combined into a single cost function,
for which the optimization is carried out. The optimization goal is to have the value of this combined objective function to be smaller than 1. As in [
10], the investigation of three tuning methods for the controller parameters is performed. These tuning methods are Genetic Algorithm (GA), Differential Evolution (DE), and Particle Swarm Optimization (PSO). The population size is chosen as 200, which is the same value used in [
10] because the number of parameters to tune is the same. The crossover rate, the weight factor, the acceleration rate, and the mutation rate are also kept the same as in [
10]. During the optimization process, the FOPD controller included in the objective transfer functions is realized as an integer-order transfer function by using the Oustaloup’s approximation method as explained in [
10]. In this work, a fractional-order integrator is approximated by a second-order integer order transfer function.
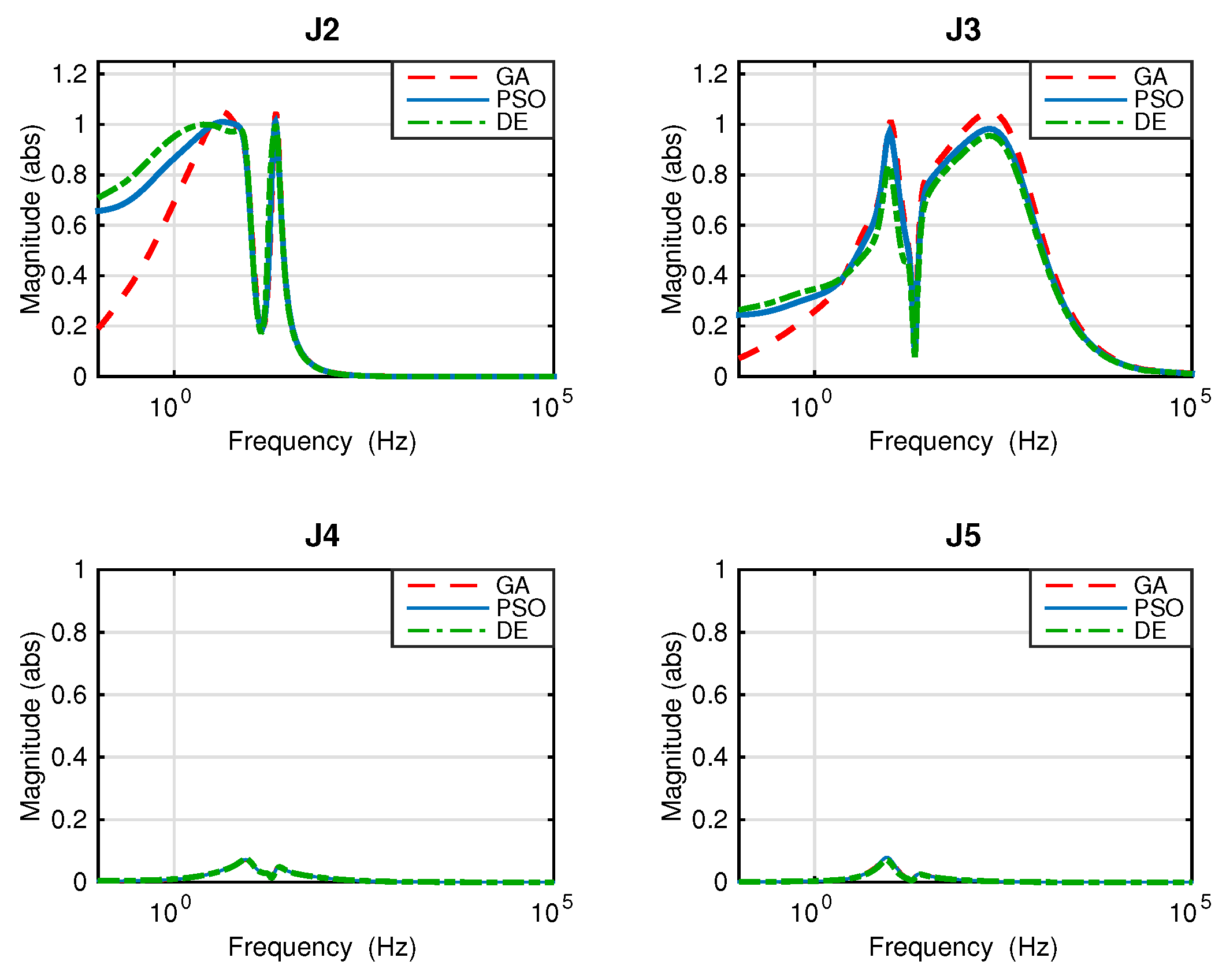
Table 6 summarizes the resulting infinity norms of the objective function resulting from different tuning methods. In addition, the resulting magnitude plots of all objective transfer functions, except the stability objective, resulting from the three different tuning methods are shown in
Figure 13. It can be observed that only the DE algorithm results in the maximum magnitudes of the objective functions smaller than 1. Therefore, this controller design will be used for implementation and comparison with the other kind of controllers.
Table 7 summarizes the values of the FOPD controller and the notch filter parameters obtained from the DE optimization. For comparison, the conventional PD controller,
is tuned based on the same objectives and algorithms as the FOPD controller (
Table 8). Moreover, the
surge controller designed in [
9] for the same compression system is also considered.
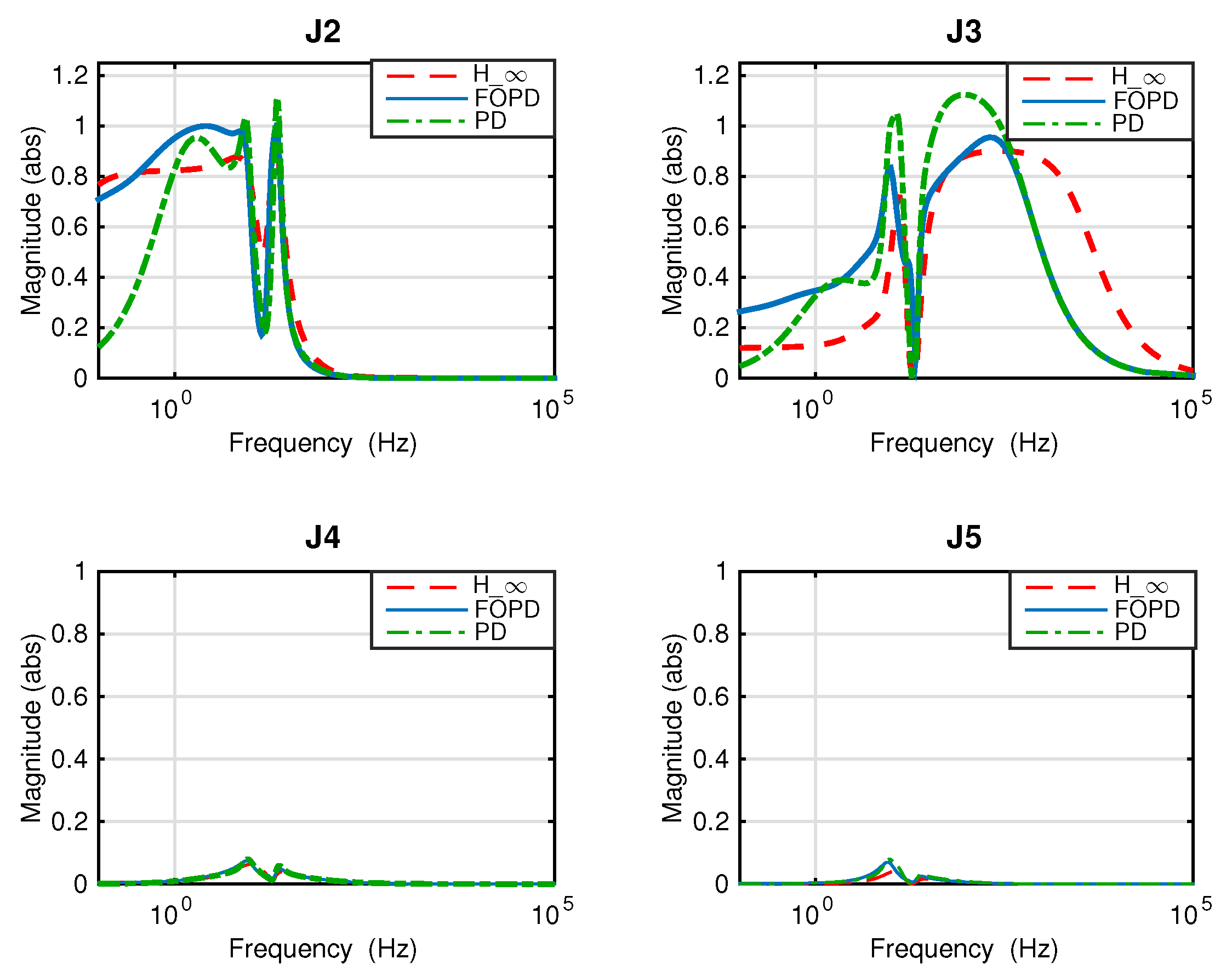
Table 9 summarizes the values of all objectives for the PD controller (
20), the FOPD controller (
5), and the
controller [
9]. The corresponding magnitude plots of the objective transfer functions are illustrated in
Figure 14. Note that the practical realization of the fractional-order component of the designed FOPD controller is done by applying the Oustaloup’s approximation mentioned earlier. Model reduction is carried out by the Control Toolbox in Matlab on all the compared controllers in this study for ease of implementation.
3.2. Simulation Results of Surge Control
With the derived surge controller, simulation was carried out on the nonlinear compression system model described by Equations (
1a)–(1d). The closed-loop dynamics of the thrust AMB,
, is represented by a third-order low-pass Butterworth filter with the cutoff frequency of 70 Hz.
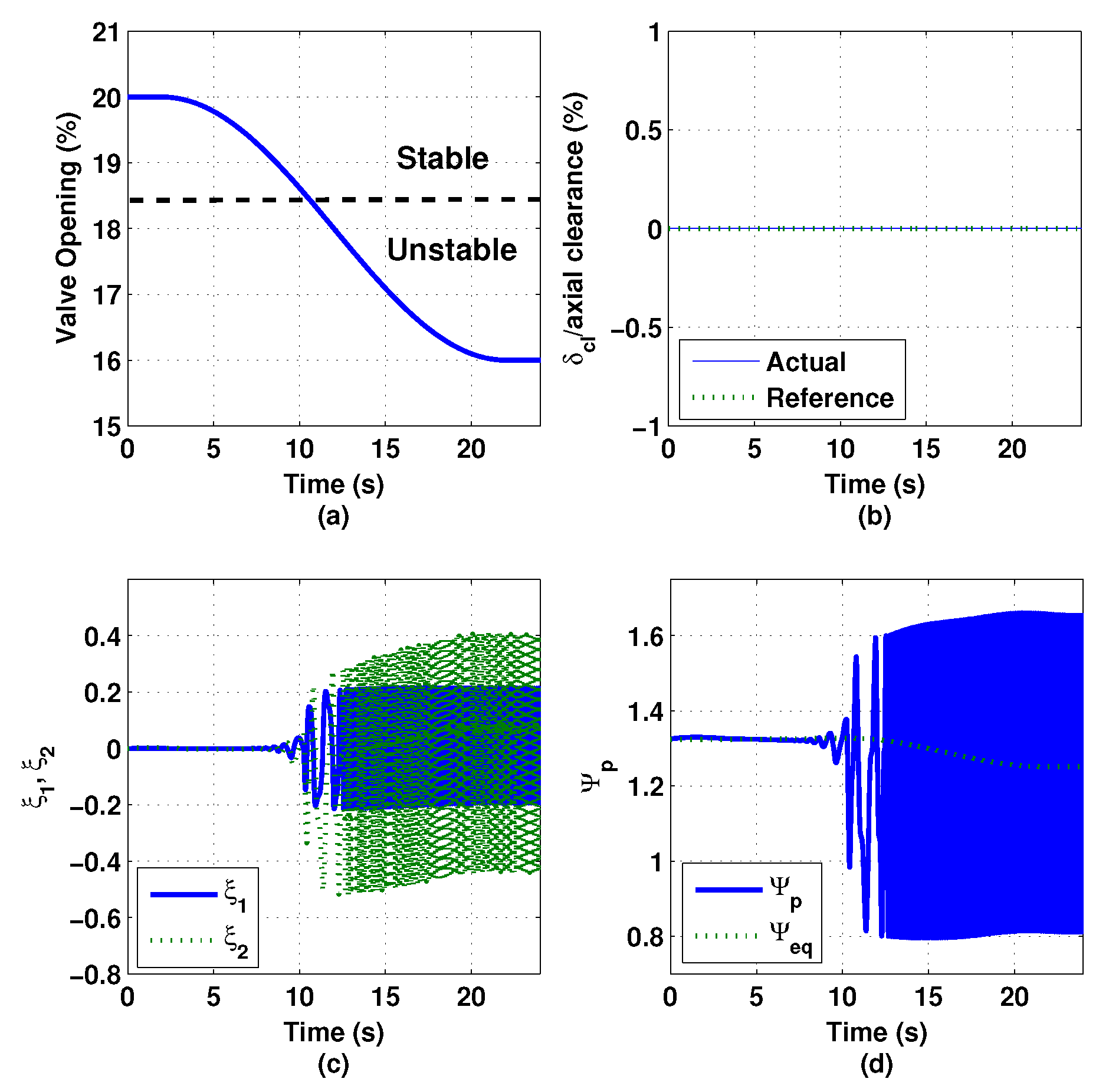
Figure 15 shows the simulation results of the compression system when the surge controller is inactivated. In the simulation, the throttle valve was gradually closed down from 20% opening (stable) to 16% opening (unstable), where the crossing between the two regions occurs at 18.5% opening. Since there is no surge controller activated, the variation of the impeller tip clearance remains zero, as shown in
Figure 15b.
Figure 15c shows that the states
and
of the compression system demonstrate large oscillation magnitudes after the system enters the surge region. Similarly, the value of the plenum pressure rise
demonstrates large oscillation magnitudes after the system enters the surge region, as shown in
Figure 15d.
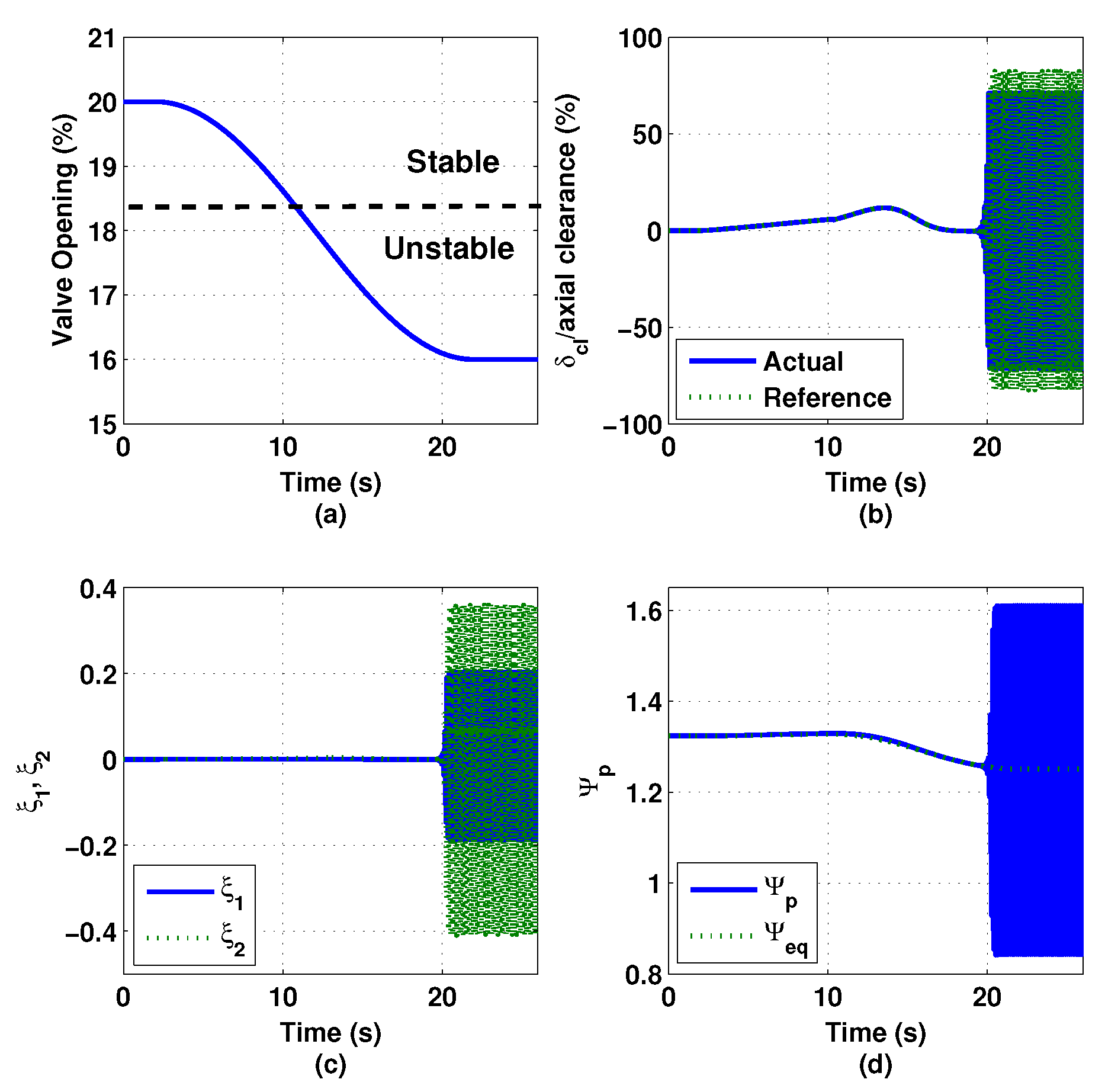
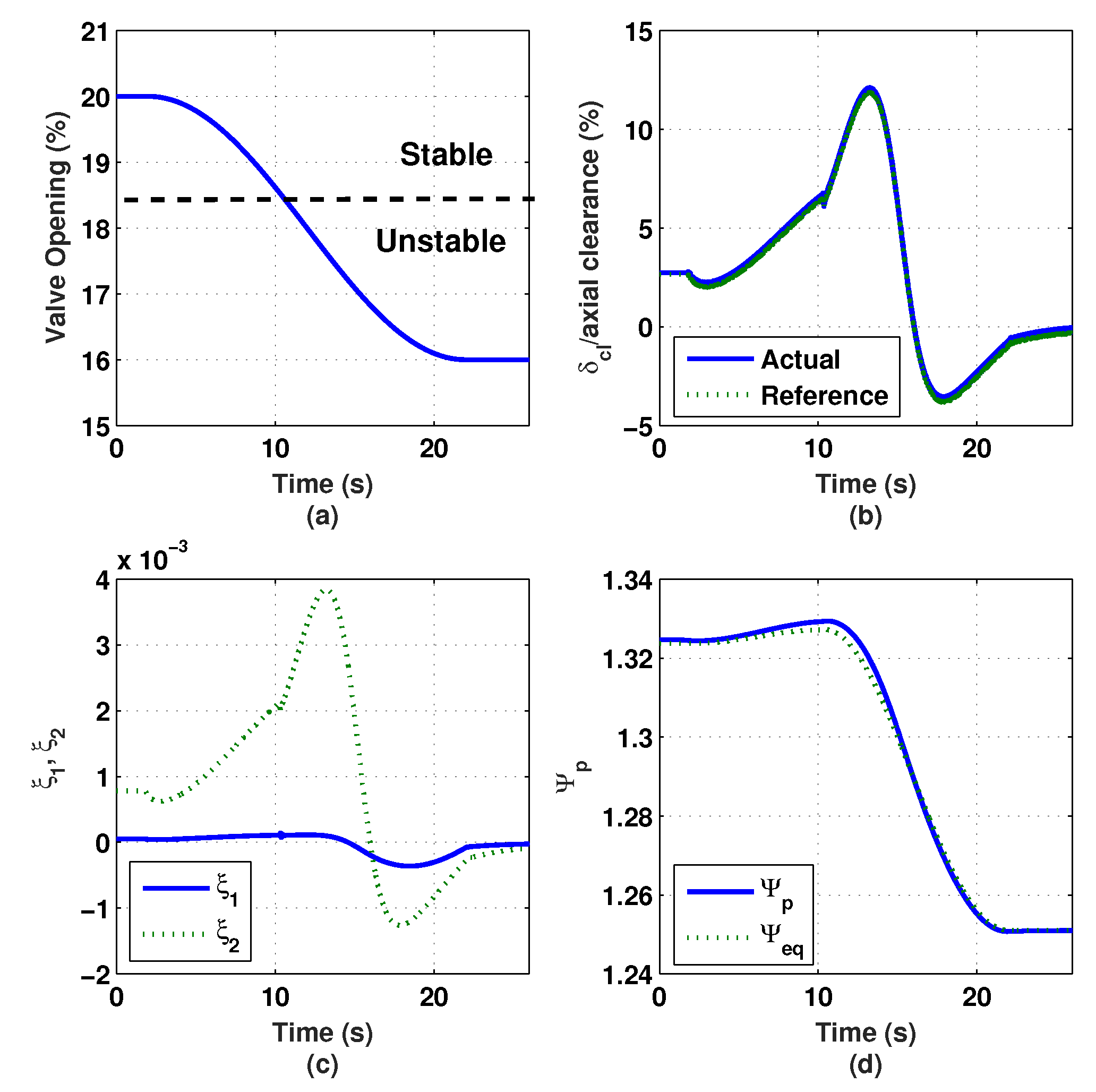
Figure 16 shows the simulation results of the compression system when using the integer-order PD (IOPD) controller that is tuned with the same algorithm and objectives as for the FOPD controller. This IOPD controller can stabilize the compression system even after the system enters the surge region, but the system becomes unstable at approximately 16.2% of throttle valve opening.
Figure 17 shows the simulation results of the compression system when the
surge controller is activated. The compression system is stabilized even when it enters the unstable region by modulating the impeller tip clearance, as shown in
Figure 17b. Both states
and
of the compression system are still stable even after the system enters the unstable region, as shown in
Figure 17c. Finally,
Figure 17d shows the values of the plenum pressure rise
and the equilibrium pressure rise
that stabilize the compression system.
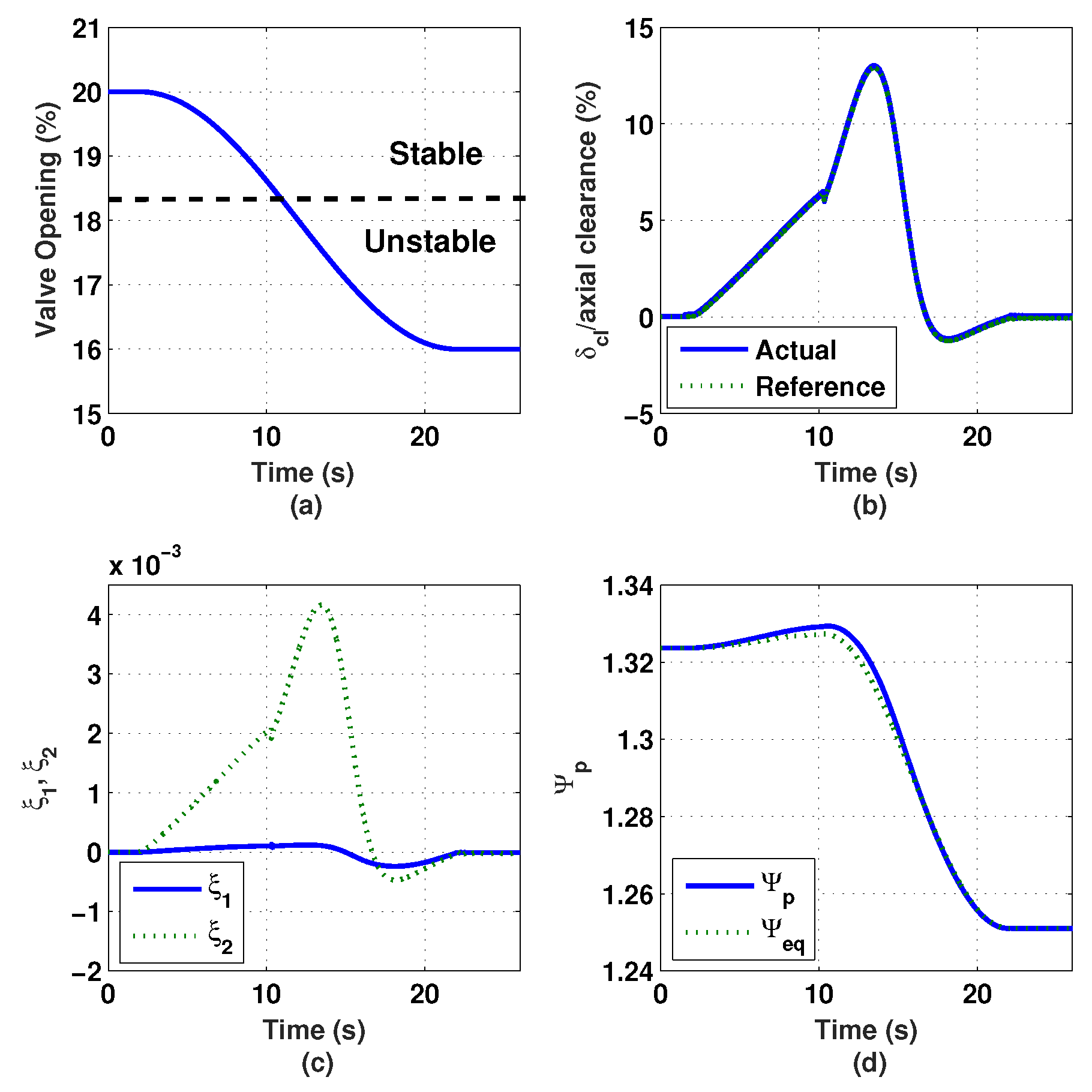
Similar to the performance provided by the
surge controller, the FOPD surge controller stabilizes the compression system. In addition, the peak value of the tip clearance modulation is approximately the same as in the case of the
surge controller, as shown in
Figure 18b. In addition, the maximum values of the states shown in
Figure 18c stay stable after the system enters the surge region. It can be seen that the FOPD surge controller performs better than the IOPD surge controller. Finally, the simulation results demonstrate that the FOPD surge controller performs at a similar level as the
surge controller.
3.3. Experimental Test of Surge Control
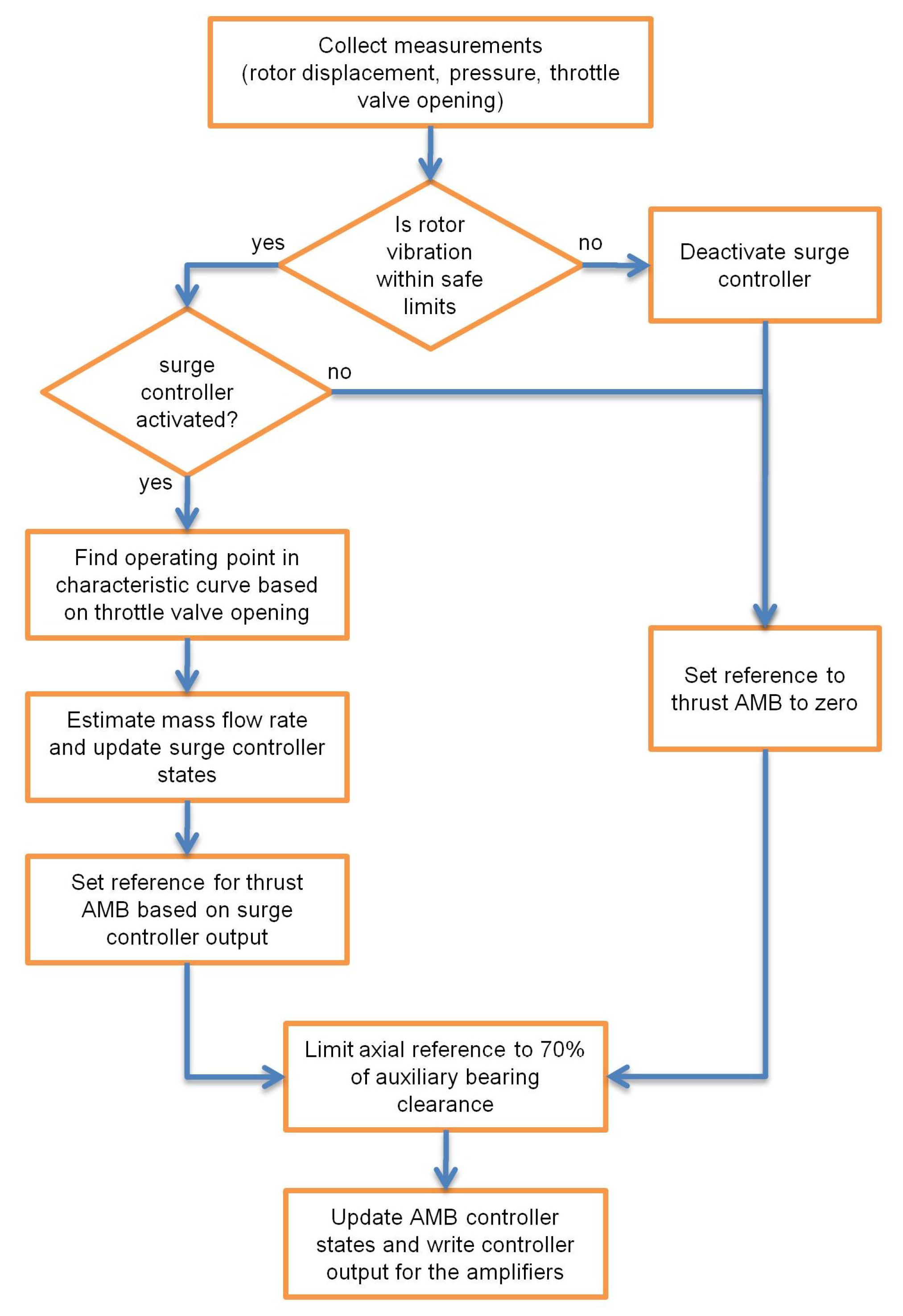
The surge controller will be activated when needed on top of the rotor suspension controllers that are always active throughout the operating period. Since the surge control implementation will be tested at 16,290 rpm, at which the system stores high energy, an accidental contact by improper surge controller implementation can cause more damage to the compressor than the surge instability. Therefore, a safety mechanism for the surge controller activation is required. In our experiments, prior to the surge controller activation, rotor vibration is checked. If rotor vibration is within the predefined limit, the surge controller is engaged in the control process. Then, the reference of the rotor axial position computed by the surge controller is limited to ±70% of the available axial clearance. Otherwise, the reference of the rotor axial position is set to zero for a safe operating environment. The flow chart of the surge controller operation is illustrated in
Figure 19.
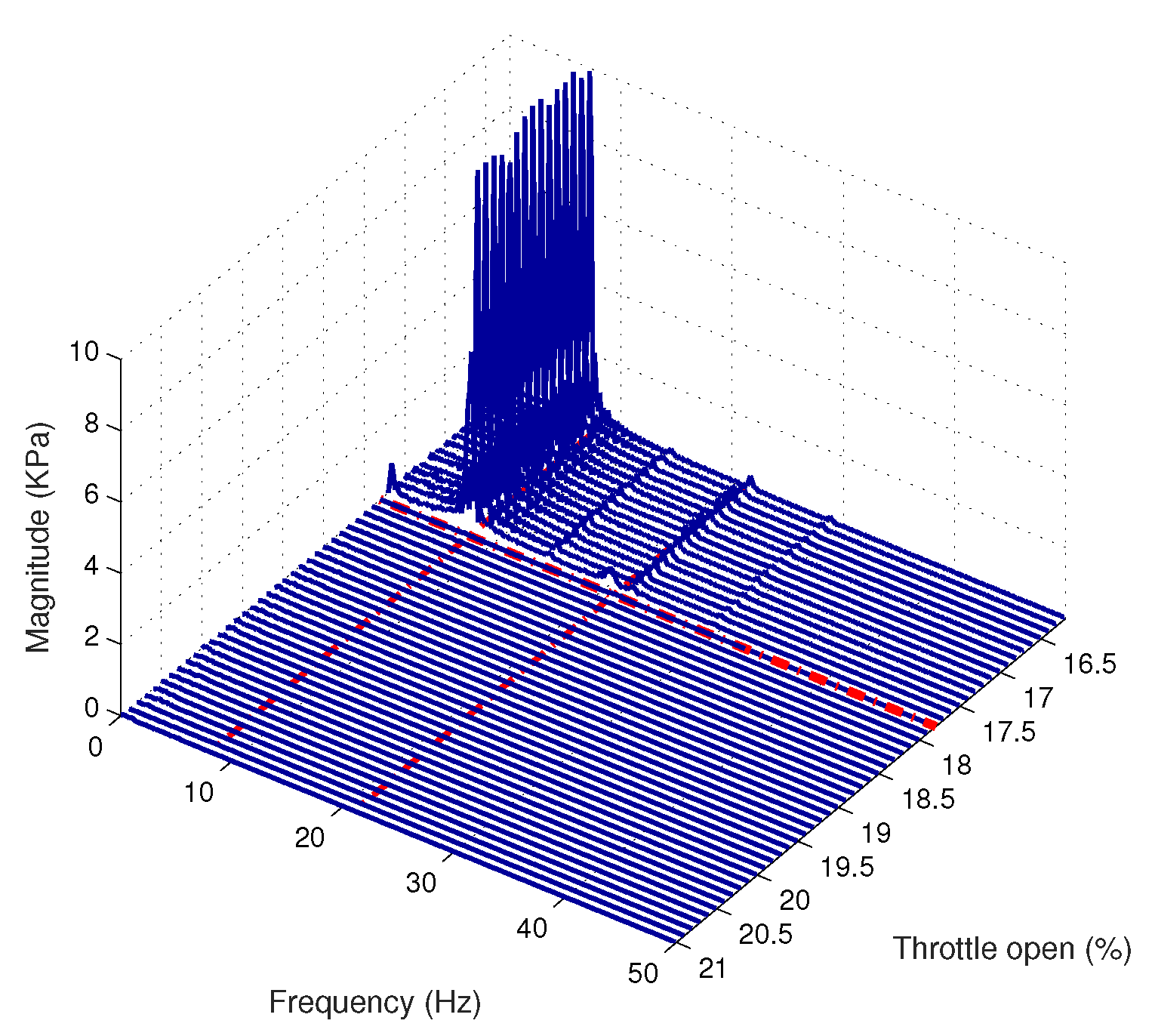
With the rotor spinning at 16,290 rpm, the system is driven into surge by gradually closing down the throttle valve starting from a 21.0% opening, in 0.1% decrements, for smooth operation.
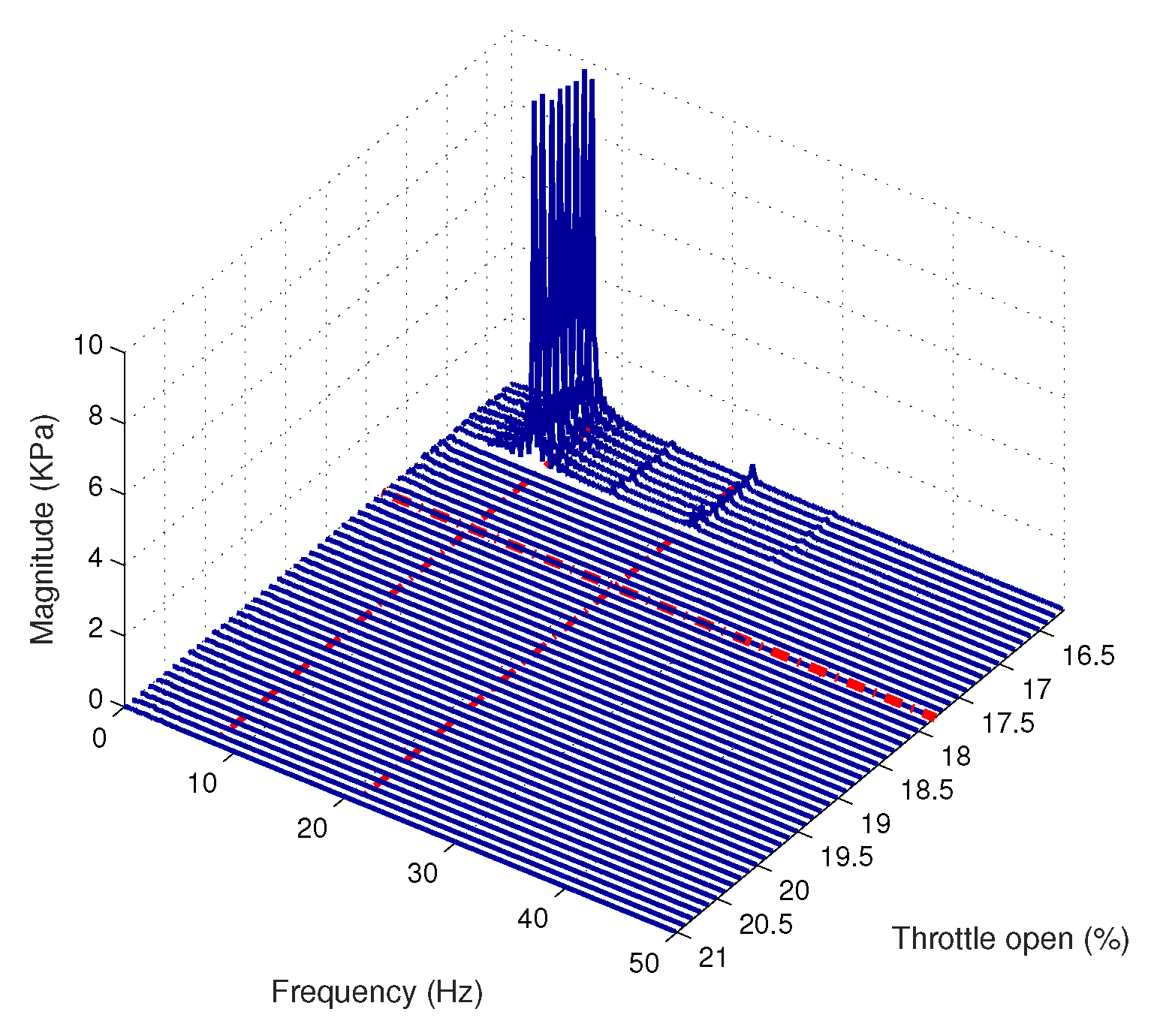
Figure 20 shows that the compression system enters the surge region at a 17.8% of the throttle valve opening in the absence of the surge controller. The frequency response plot shows large peaks at approximately 7 Hz and 21 Hz, which agrees with the prediction of the compression system characteristics described in
Section 2.2.
For the next surge test, the IOPD surge controller is activated under the same testing condition as in the previous test.
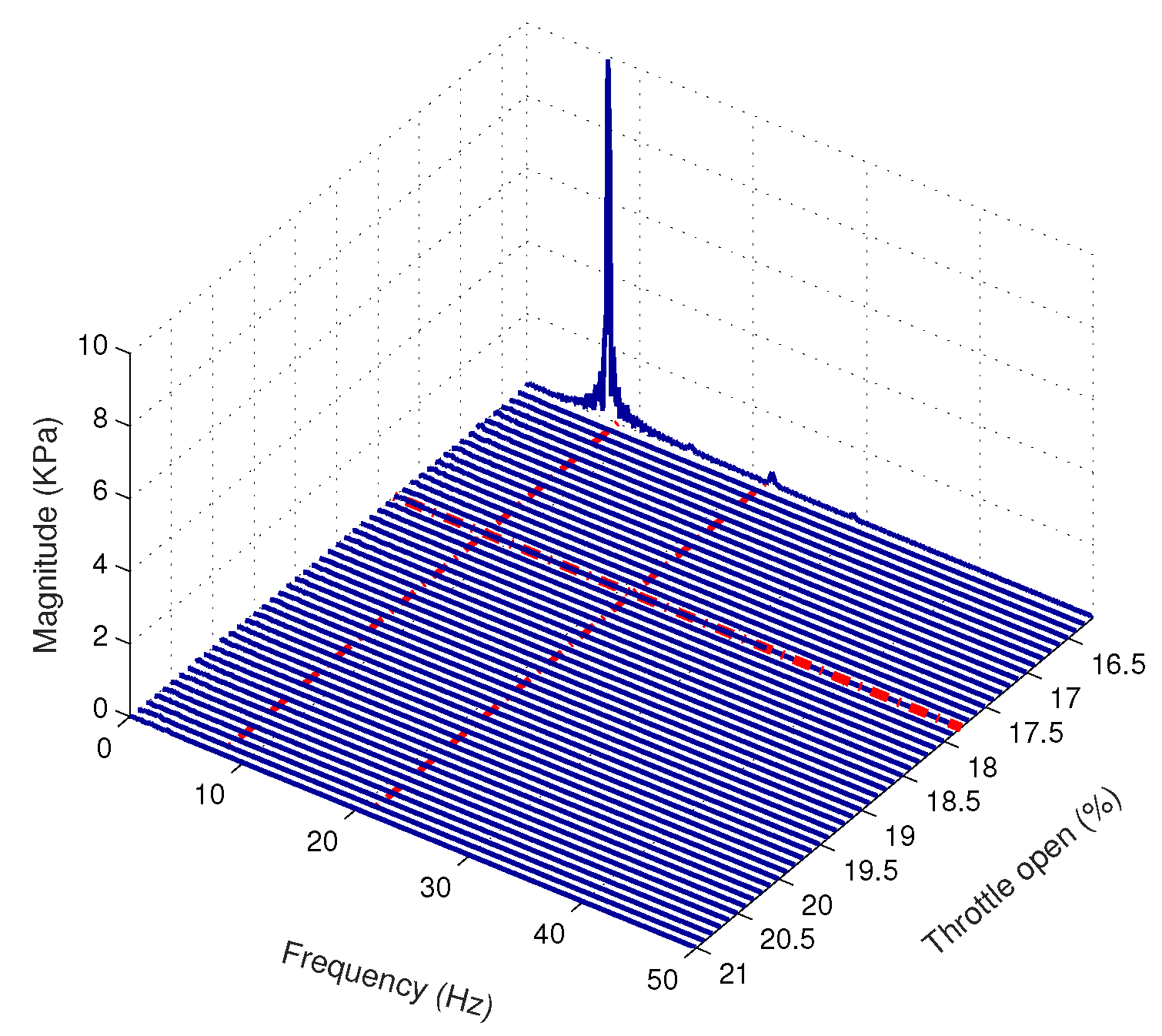
Figure 21 shows the frequency response of the measured plenum pressure rise when the IOPD surge controller is activated. The large peaks of the frequency response initiate at a 16.9% throttle valve opening position. The result shows that, with the IOPD surge controller activated, the compression system can operate stably beyond the original surge limit.
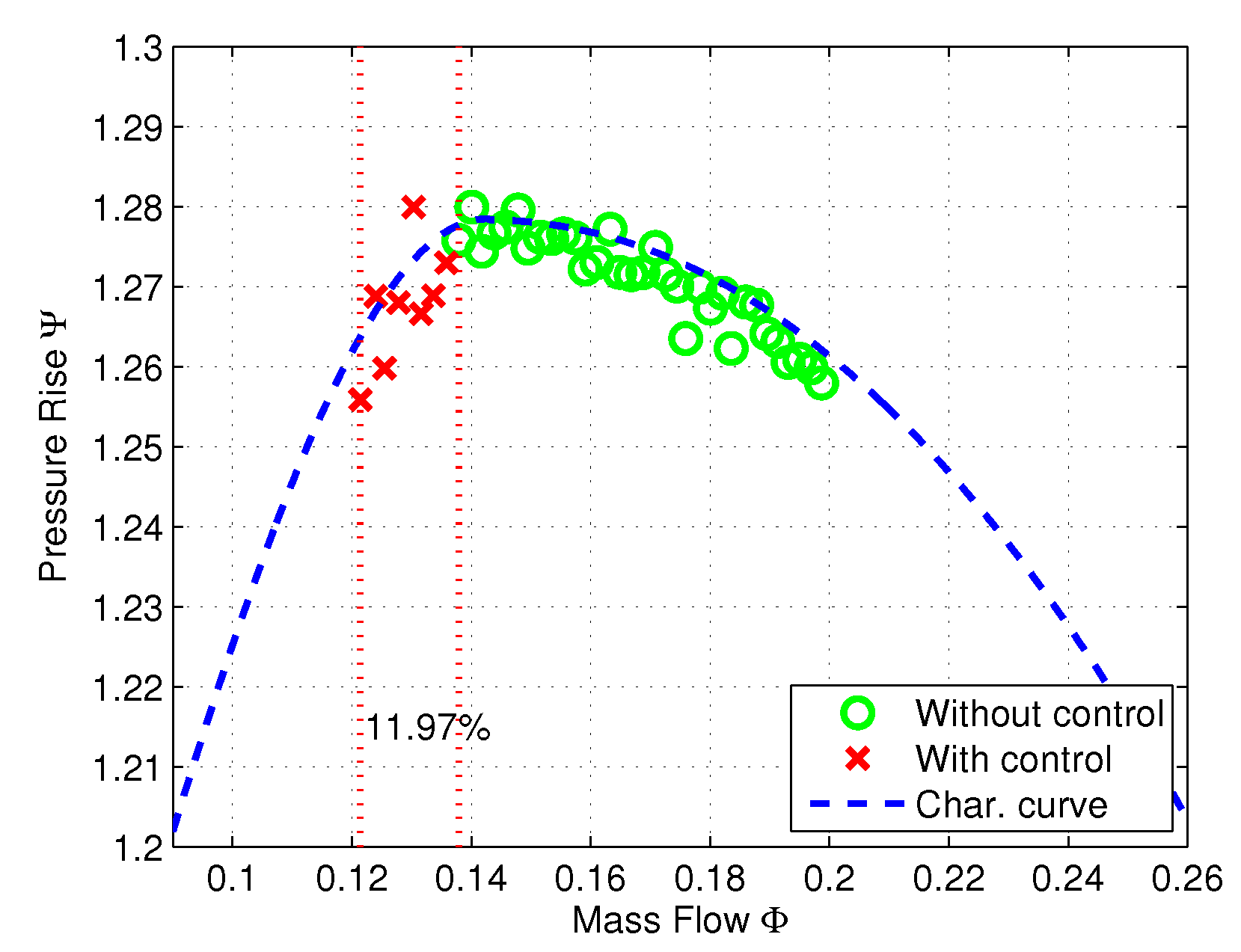
Figure 22 shows the nondimensional mass flow rate and the plenum pressure rise on the characteristic curve during stable operation. The measurements with the surge controller inactivated are marked by ‘o’. These values are measured from 21% valve opening until 17.8%, where the surge initiates. The measurements marked by ‘x’ represent the extended operating points when the IOPD controller is activated. It can be observed that the surge limit is extended in terms of the mass flow range from the uncontrolled case by 11.97%.
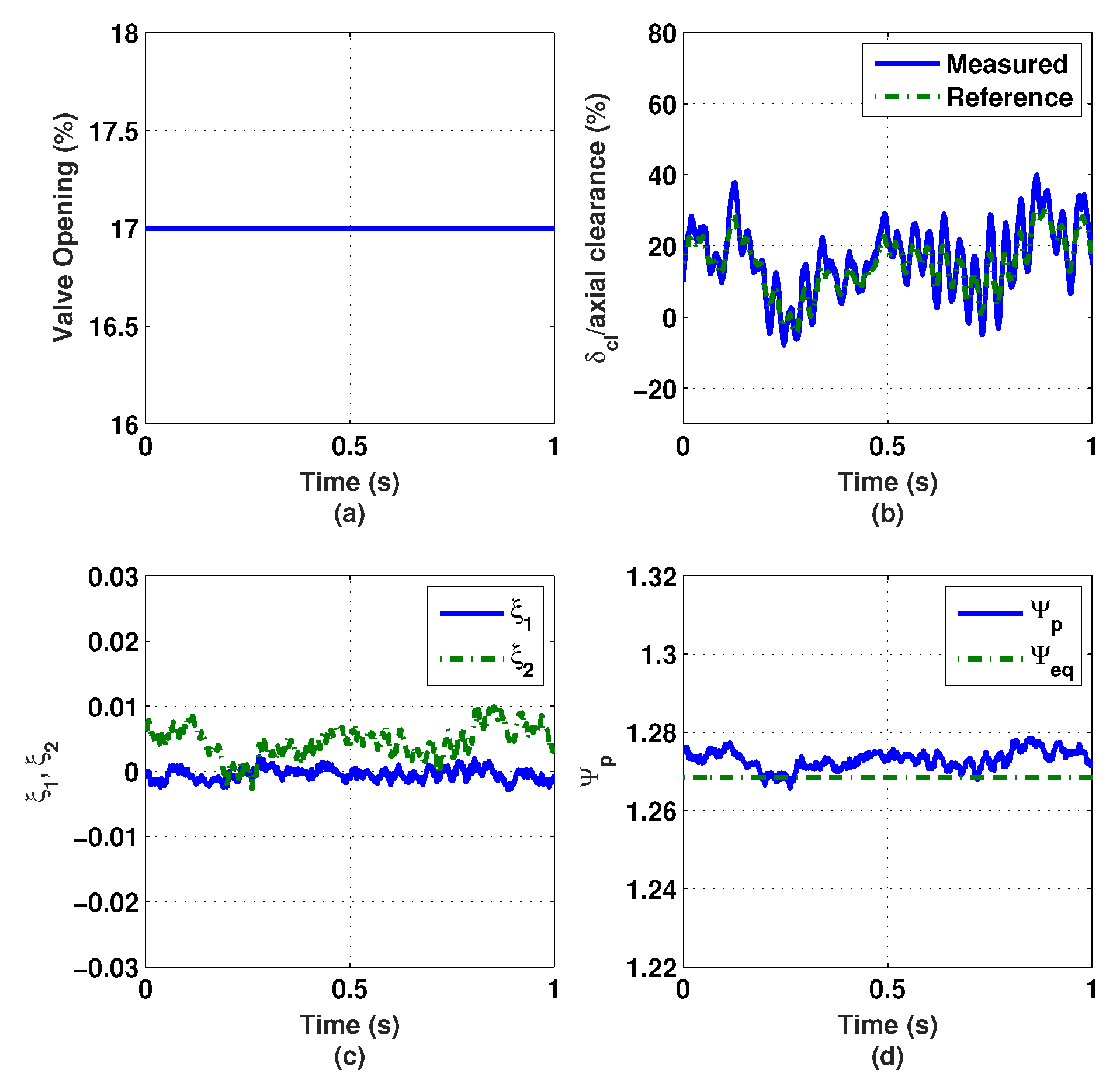
In addition, the measured and reference ratio of the impeller tip clearance and the available axial clearance are shown in
Figure 23b. The maximum value of the impeller tip clearance is about 40% of the available axial clearance. This shows that the IOPD surge controller can operate stably with some axial position margin compared with the predefined ±70% of the available clearance.
Figure 23c shows the values of the surge controller states,
and
, when the throttle valve is opened at 17.0%. The nondimensional measured pressure rise and its equilibrium values are illustrated in
Figure 23d.
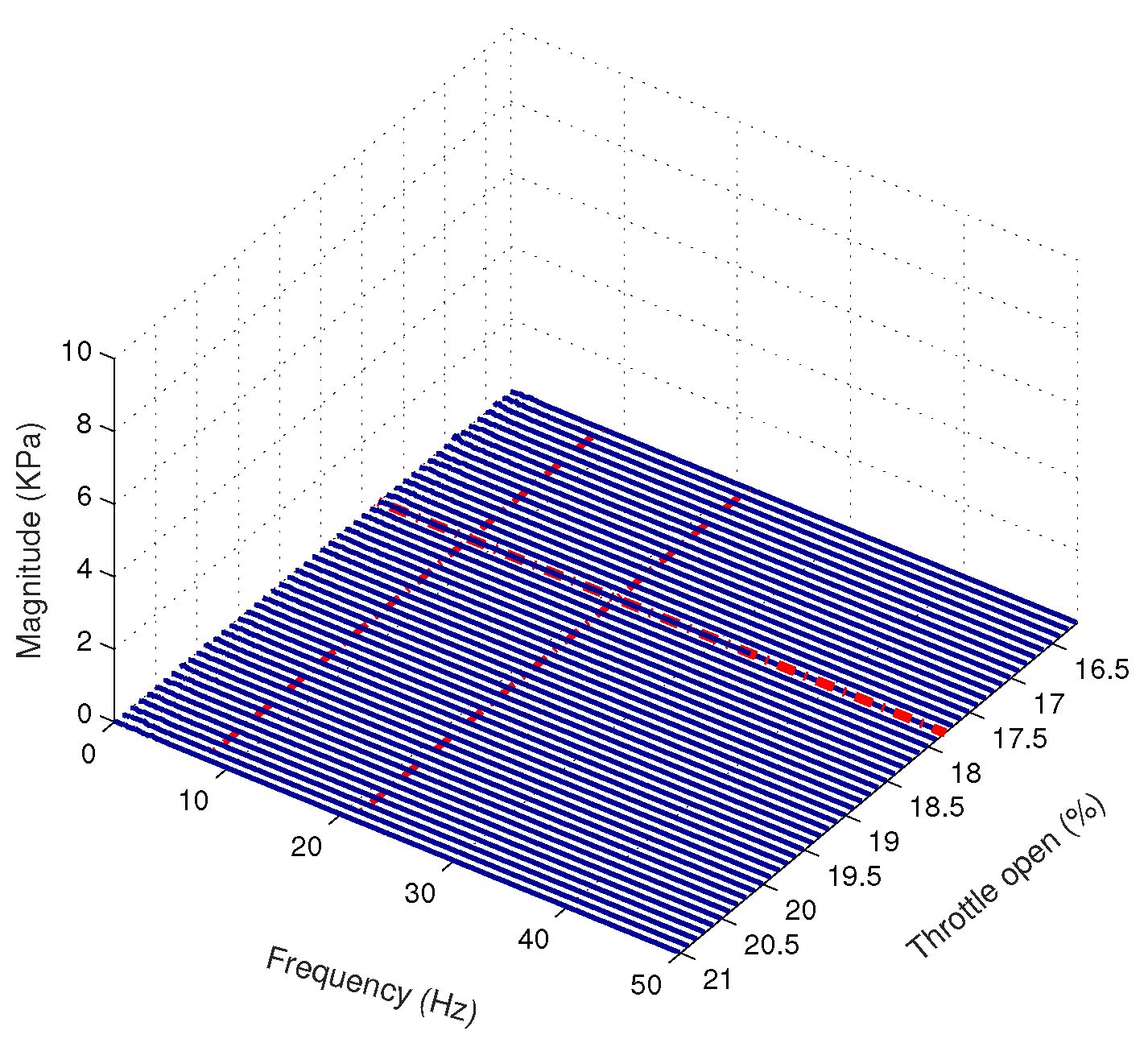
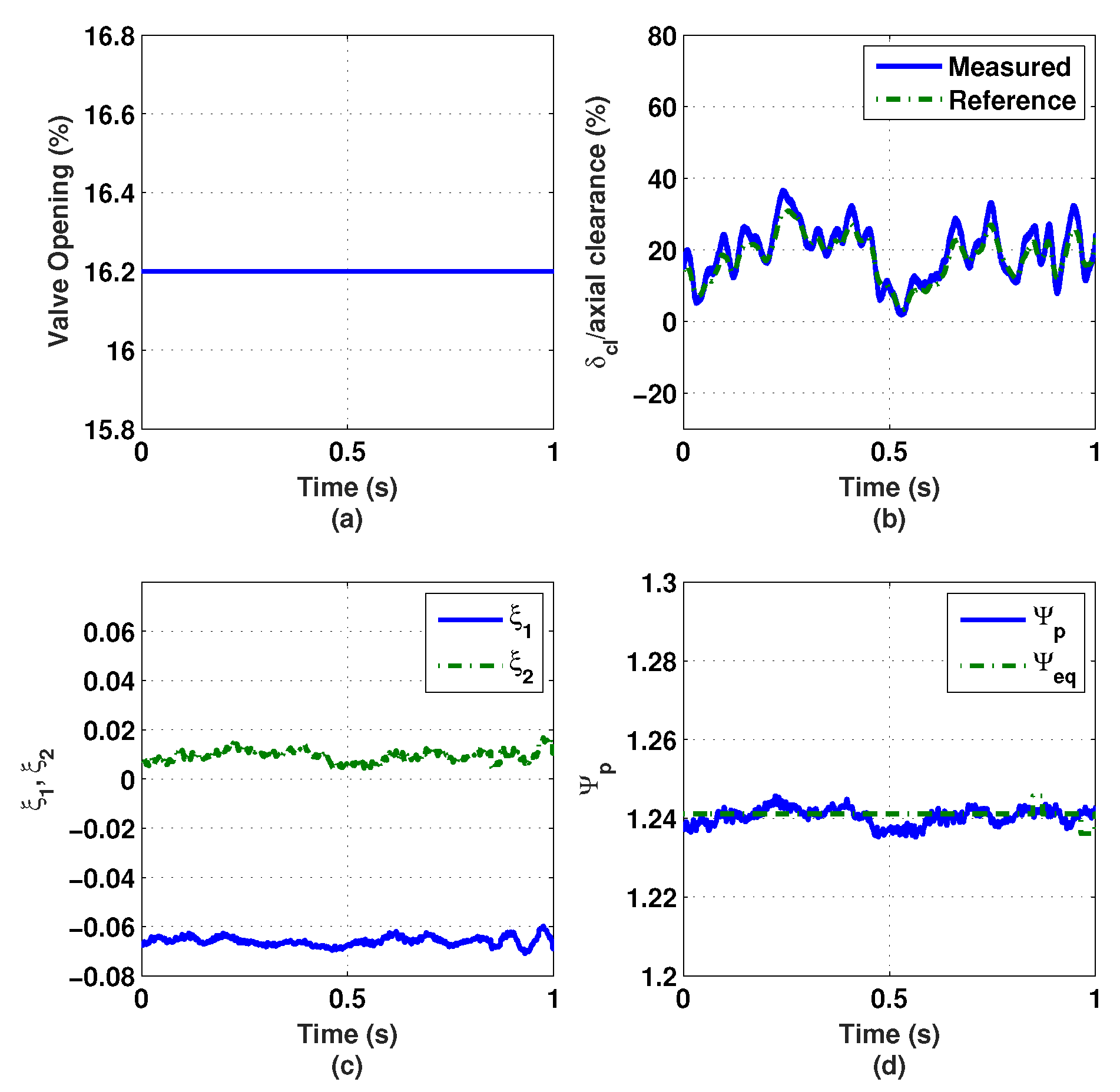
For the case of the FOPD surge controller test,
Figure 24 shows the frequency response of the measured plenum pressure rise. It can be noticed that the compression system enters surge when the throttle valve opens at 16.2%, which further extends the surge limit. Recall that the IOPD surge controller remains stable until 17.0% opening.
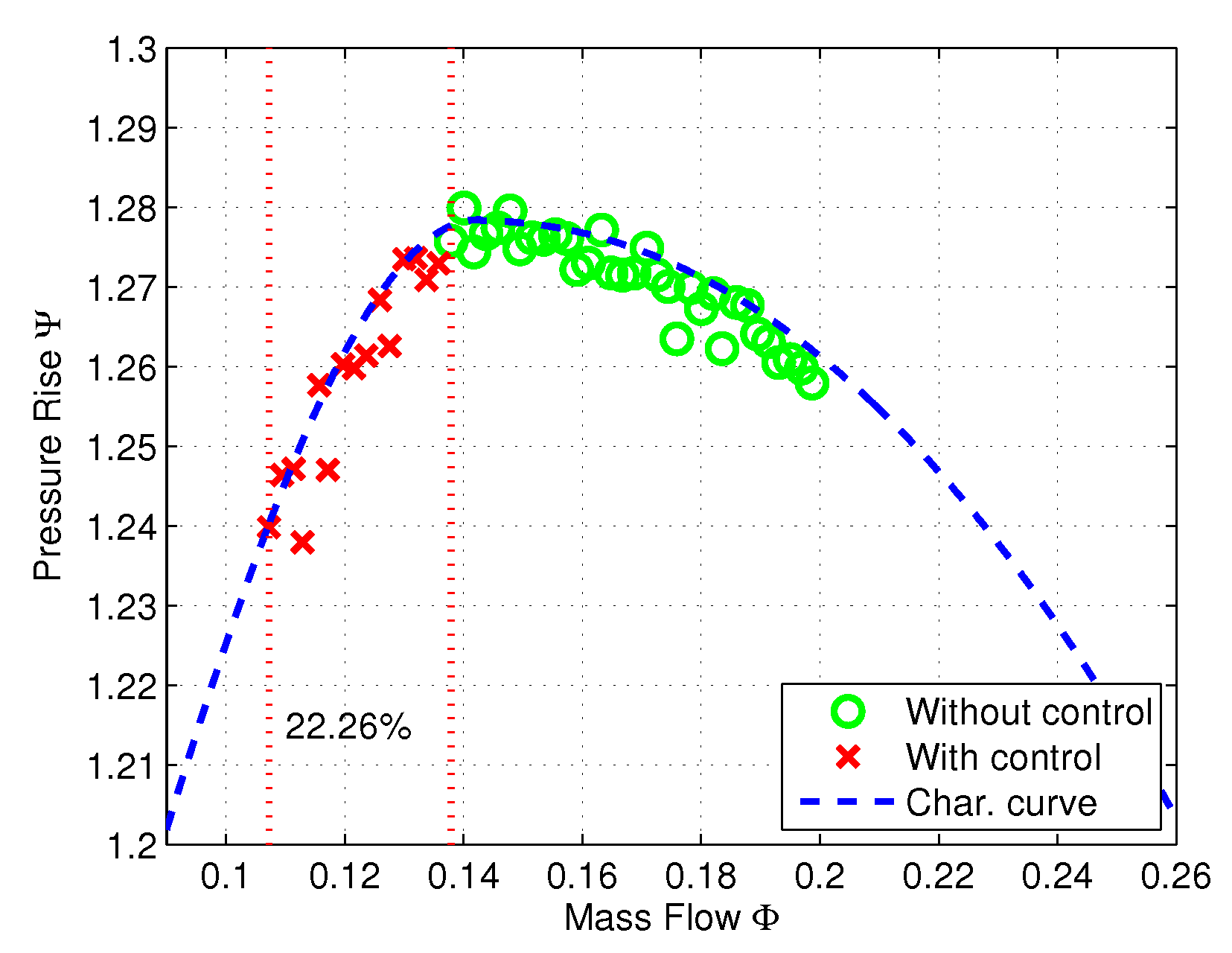
Figure 25 shows the nondimensional mass flow rate and the plenum pressure rise on the characteristic curve during stable operation with the FOPD surge controller activated after the surge limit. The measurements with the FOPD surge controller inactivated are marked by ‘o’. These values are measured from 21% valve opening until 17.8%, where the surge initiates. The measurements marked by ‘x’ represent the extended operating points when the FOPD controller is activated. It can be observed that the surge limit is extended in terms of the mass flow range from the uncontrolled case by 22.26%.
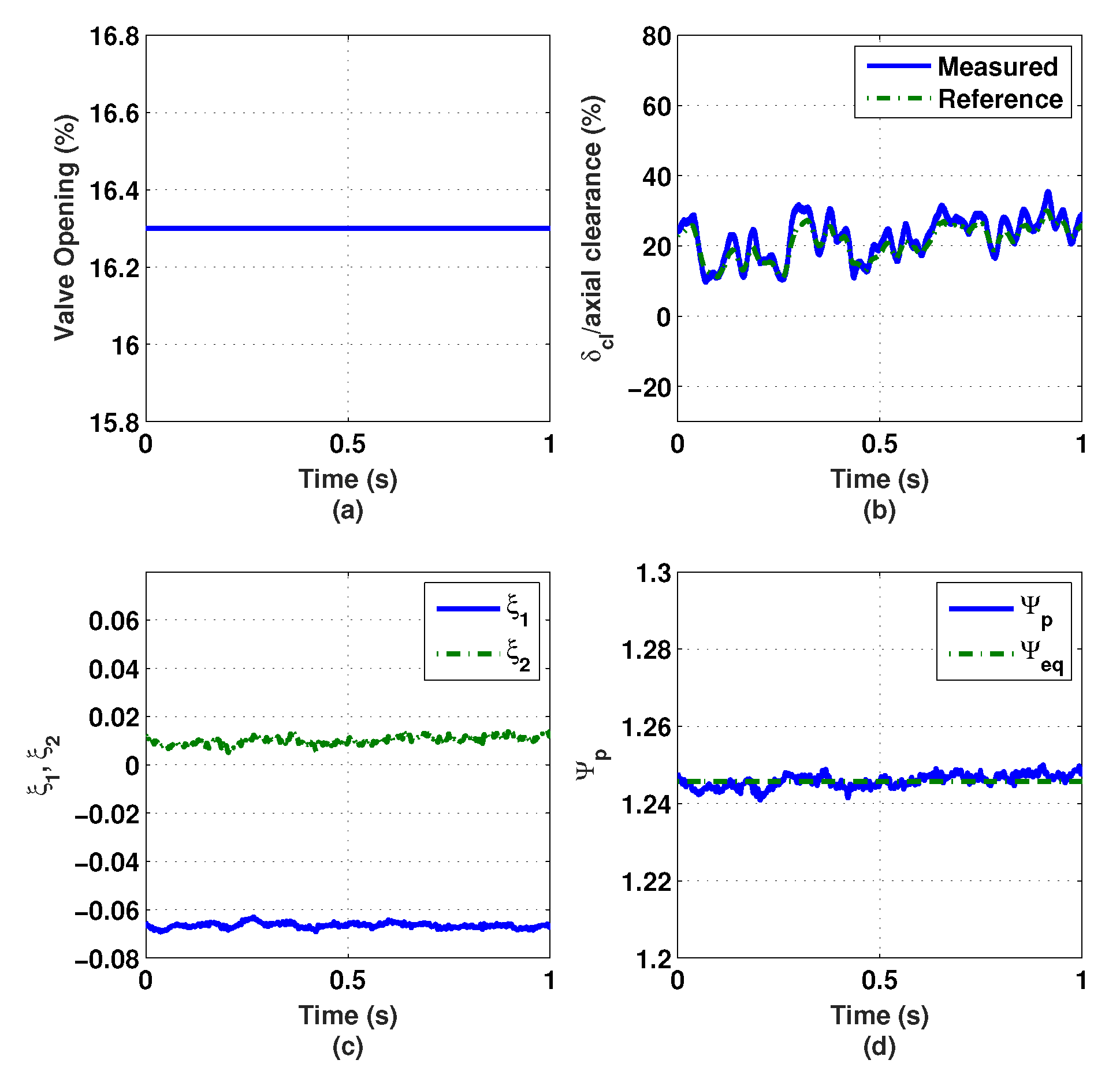
In addition, the maximum value of the impeller tip clearance is approximately 35% of the available axial clearance, as shown in
Figure 26b. This shows that the FOPD surge controller results in a slightly larger axial clearance margin than the IOPD surge controller case.
Figure 26c shows the values of the surge controller states,
and
, when the throttle valve is opened at 16.3%. The nondimensional measured pressure rise and its equilibrium values are illustrated in
Figure 26d.
Finally, for the case when the
surge controller is activated,
Figure 27 shows that the compression system remains stable when the throttle valve opens as small as 16.2%. This extends the throttle valve opening for another 0.1% beyond the FOPD surge controller case.
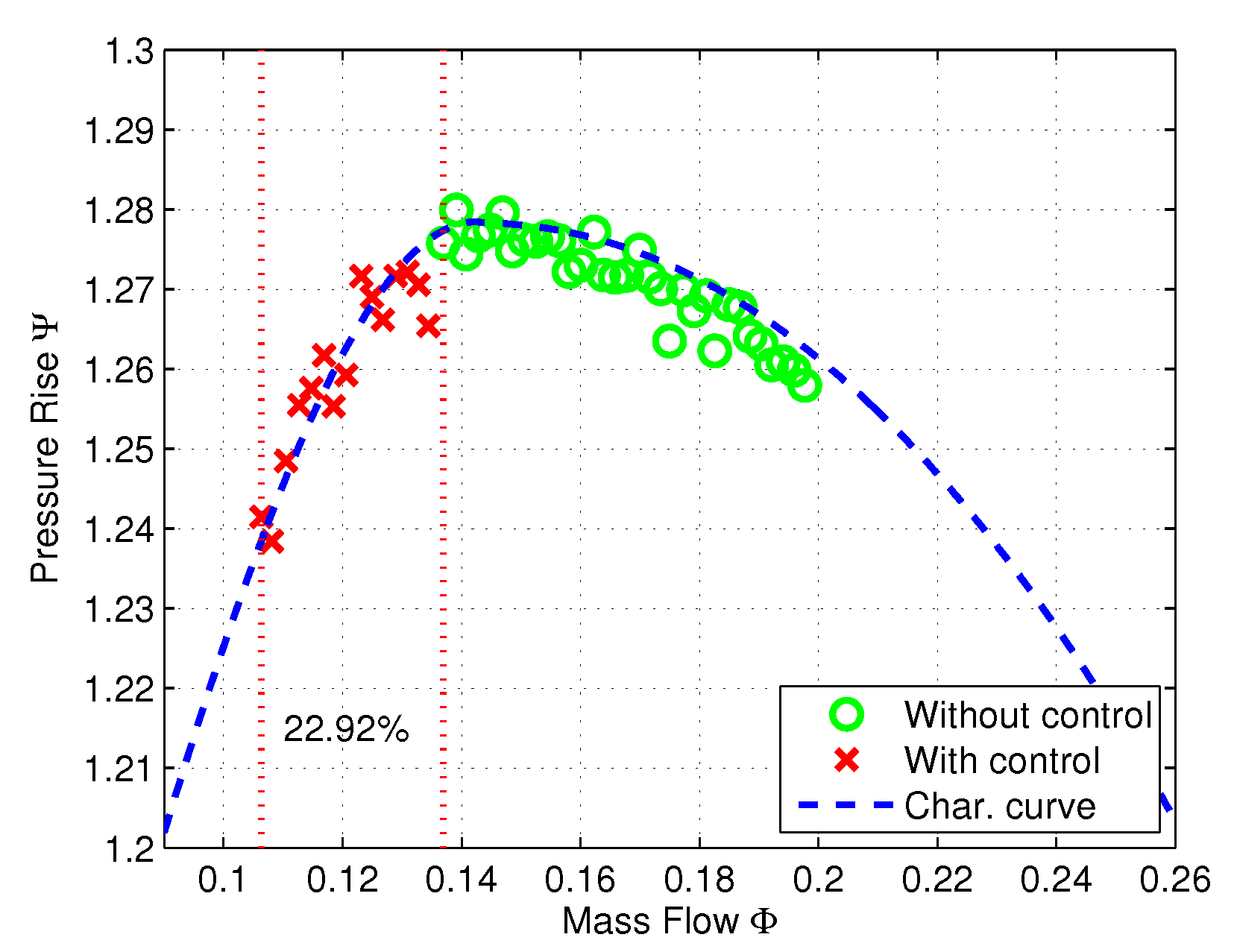
Figure 28 shows the nondimensional mass flow rate and the plenum pressure rise on the characteristic curve during stable operation with the
surge controller activated after the surge limit. The measurements with the surge controller inactivated are marked by ‘o’. These values are measured from 21% valve opening until 17.8%, where the surge initiates. The measurements marked by ‘x’ represent the extended operating points when the
controller is activated. It can be observed that the surge limit is extended in terms of the mass flow range from the uncontrolled case by 22.92%.
In addition, the maximum value of the impeller tip clearance is about 35% of the available axial clearance, as shown in
Figure 29b. This shows that the
surge controller can operate stably with approximately the same axial clearance margin as the FOPD surge controller case.
Figure 29c shows the values of the surge controller states,
and
, when the throttle valve is opened at 16.2%. The nondimensional measured pressure rise and its equilibrium values are illustrated in
Figure 29d.

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}