An Open-Source Social Robot Based on Compliant Soft Robotics for Therapy with Children with ASD


 , , , , and
, , , , and
Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
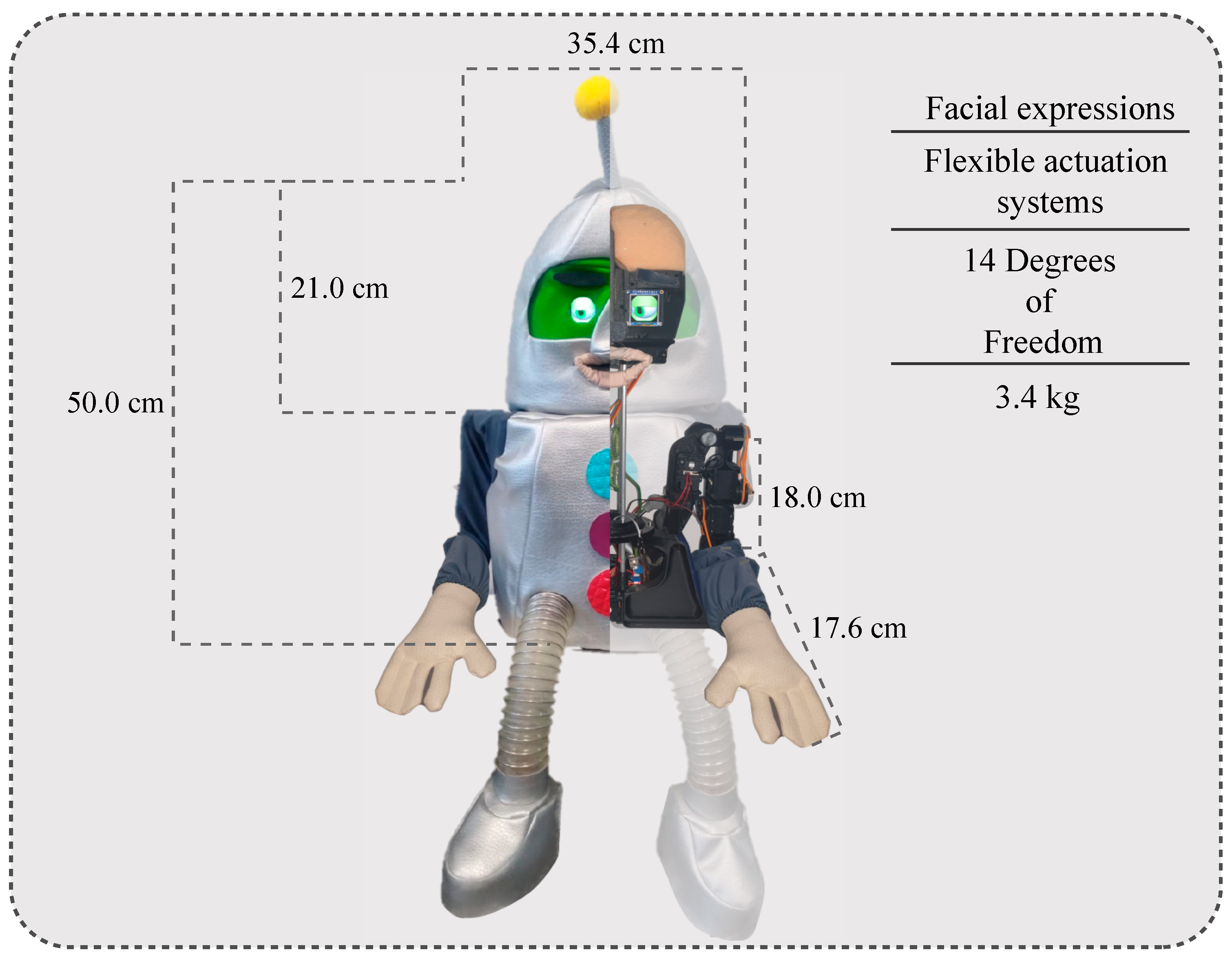
3.1. The CASTOR Robot
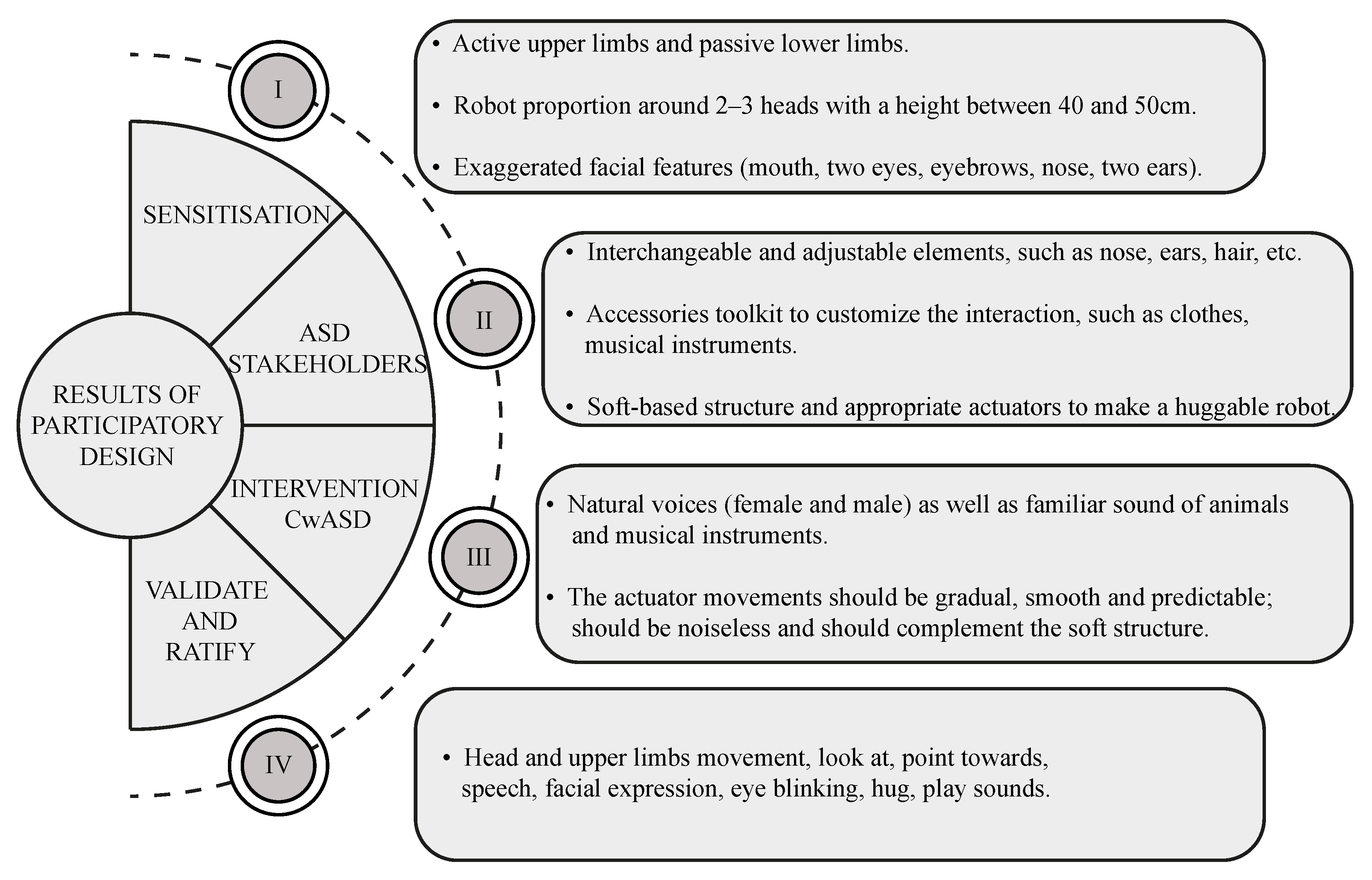
3.1.1. Design Methodology
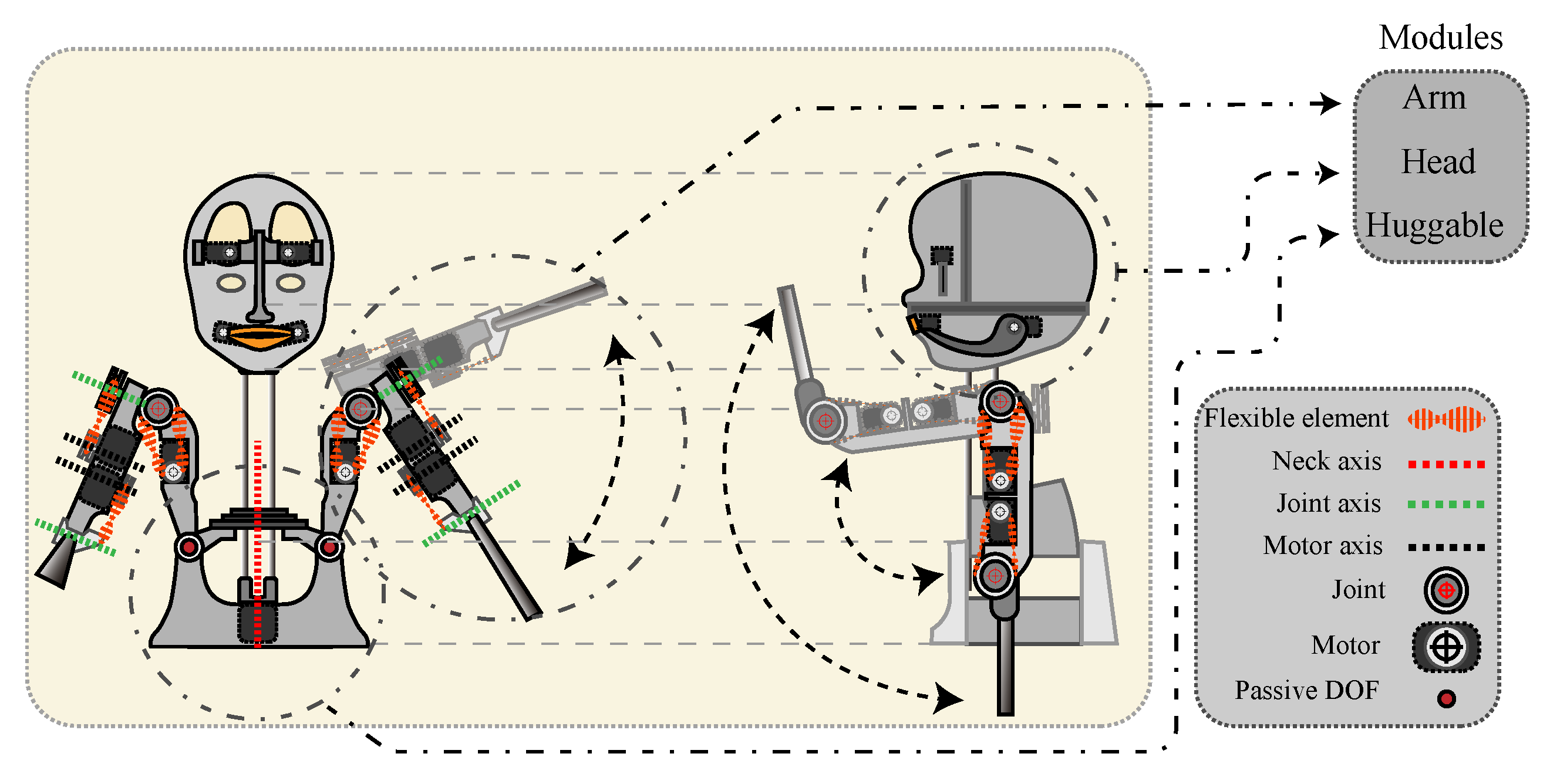
3.1.2. Development of the Robot
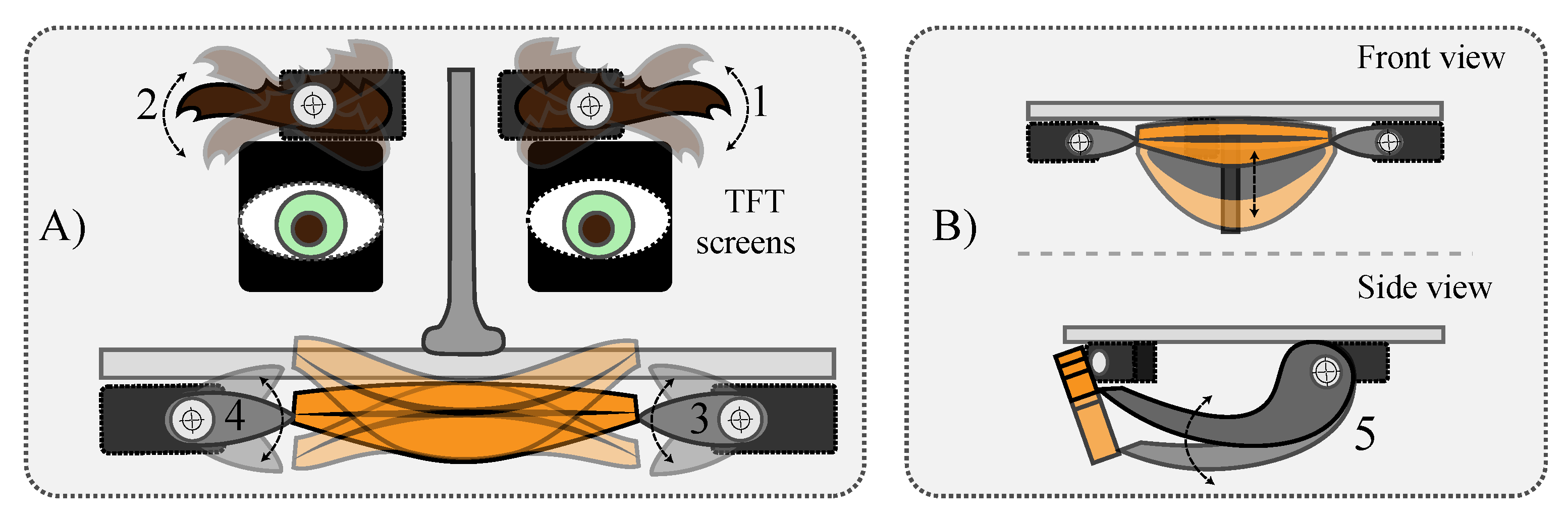
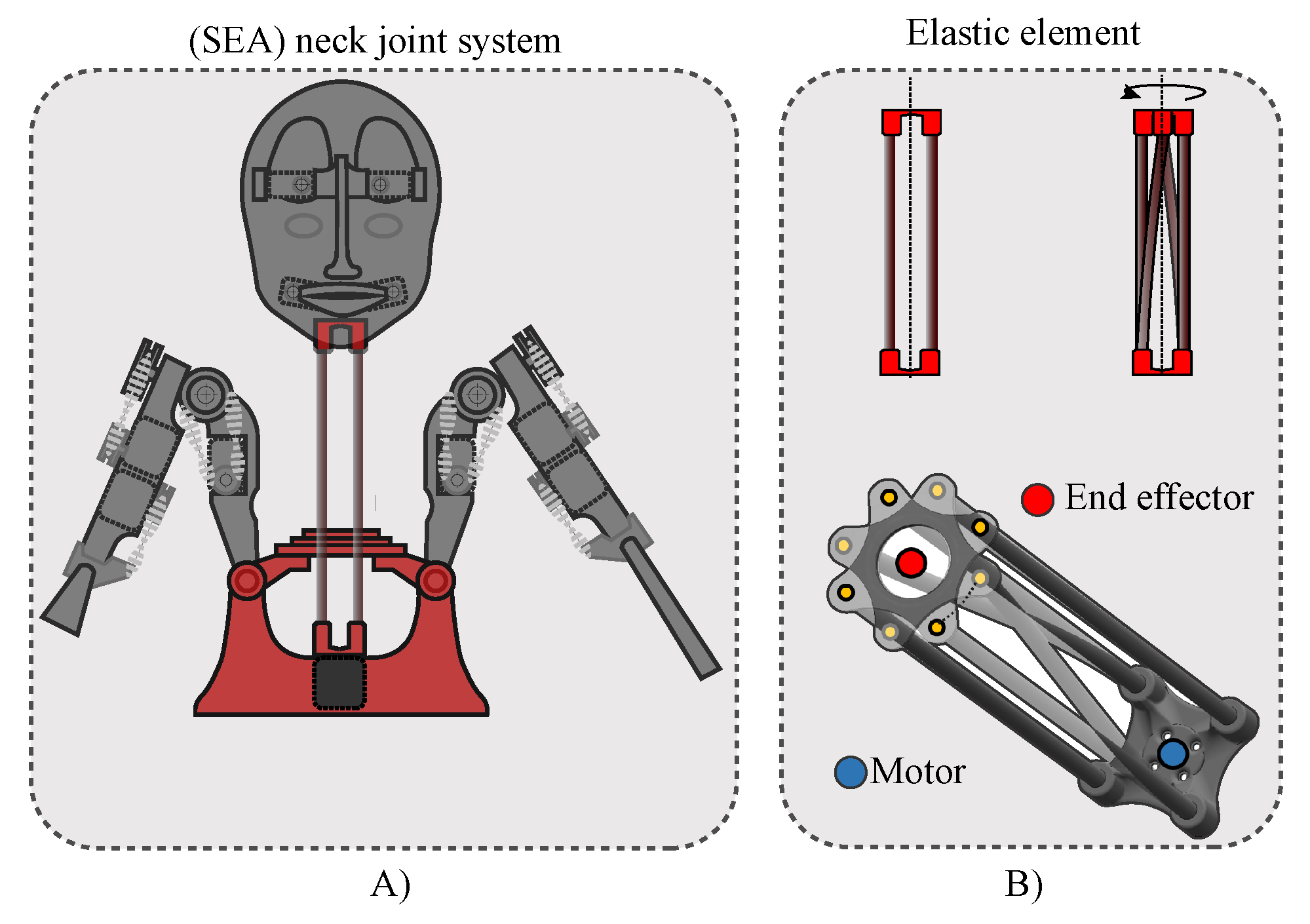
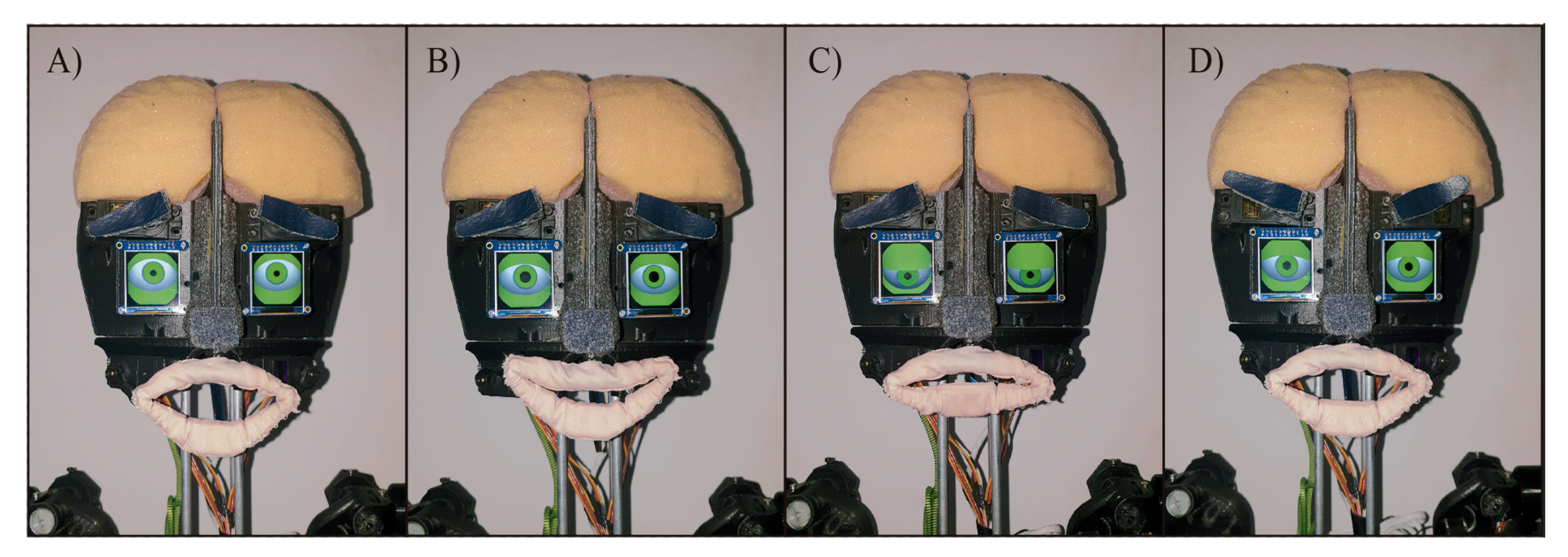
- Head and Neck Module
- B.
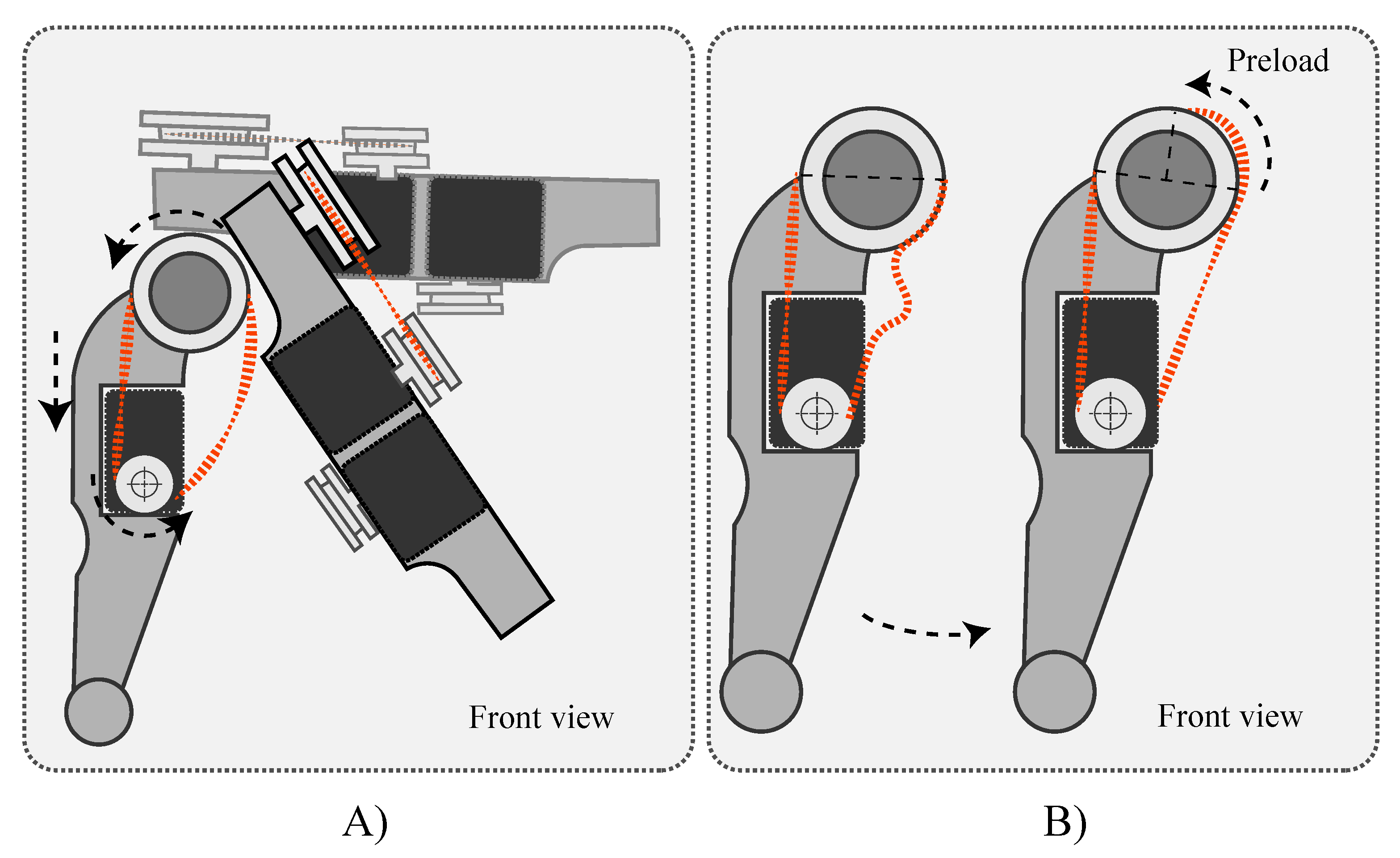
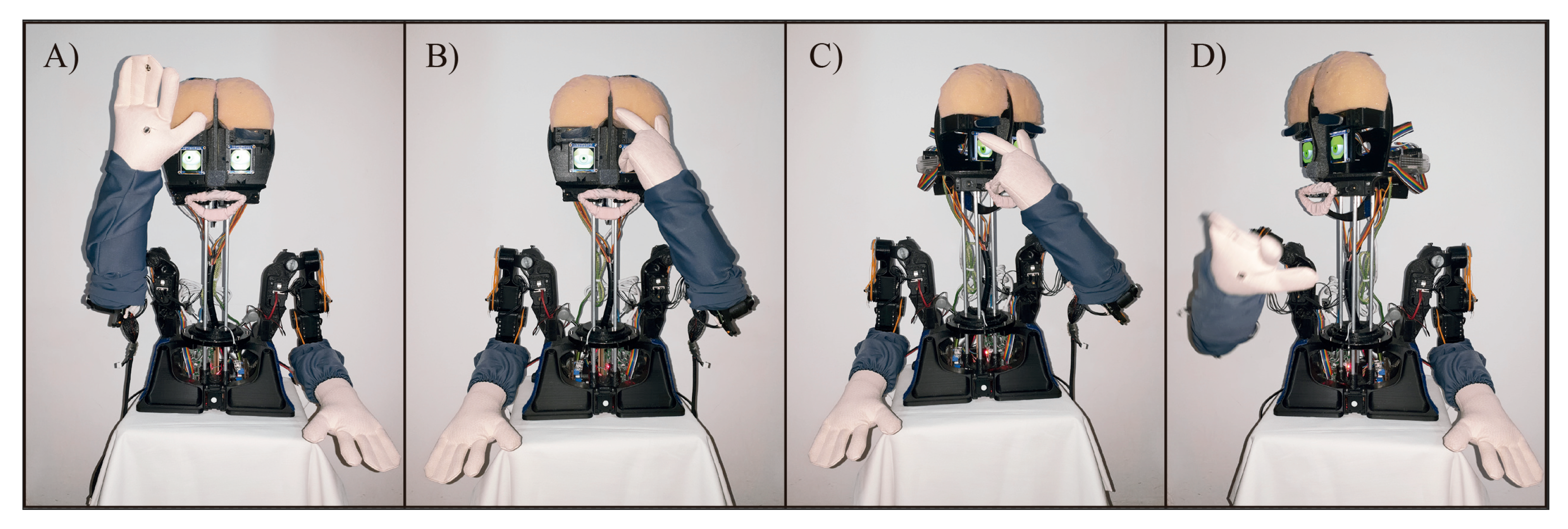
- Arm Module
- C.
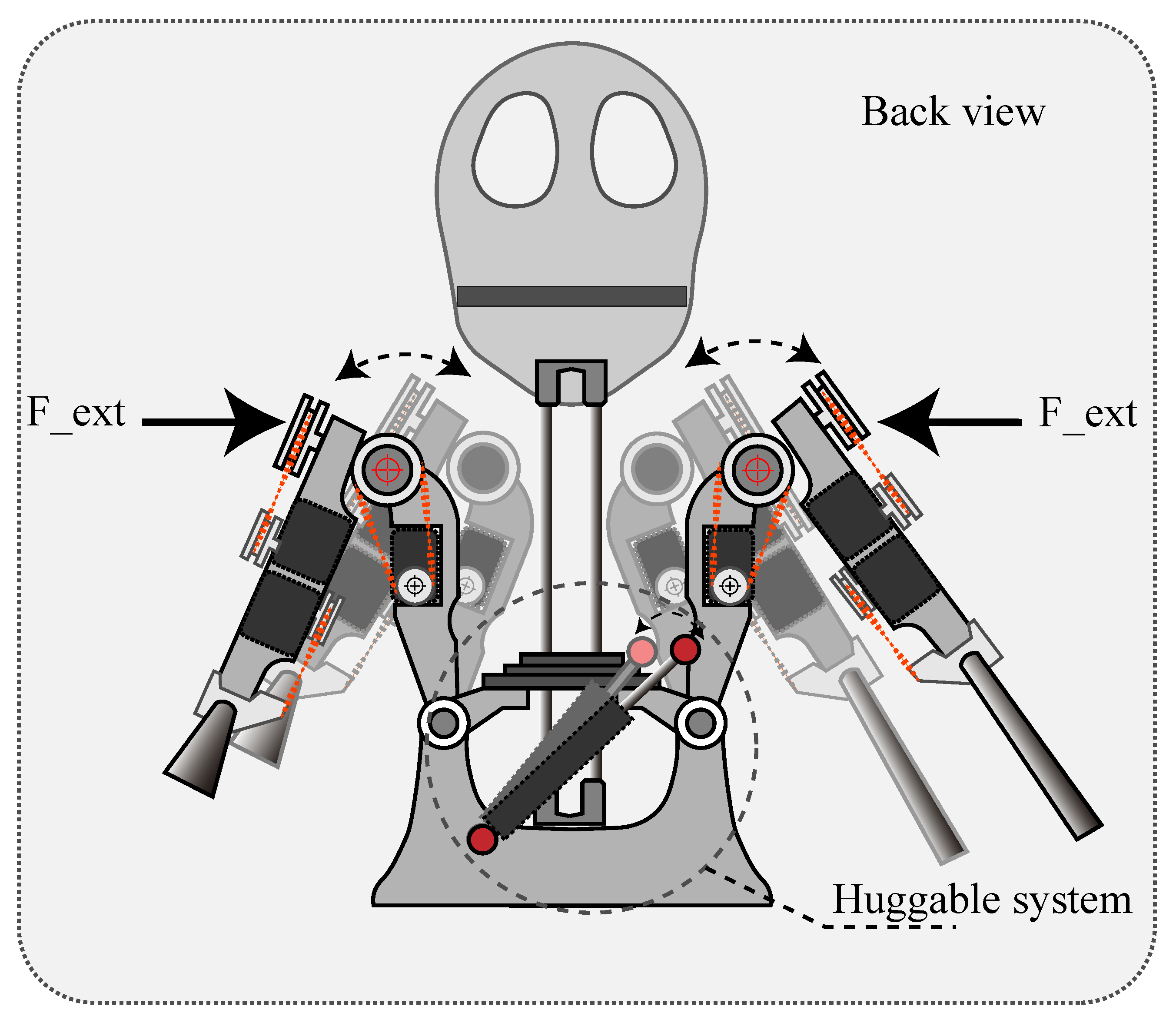
- Huggable Structure Module
- D.
- Perception Module
- E.
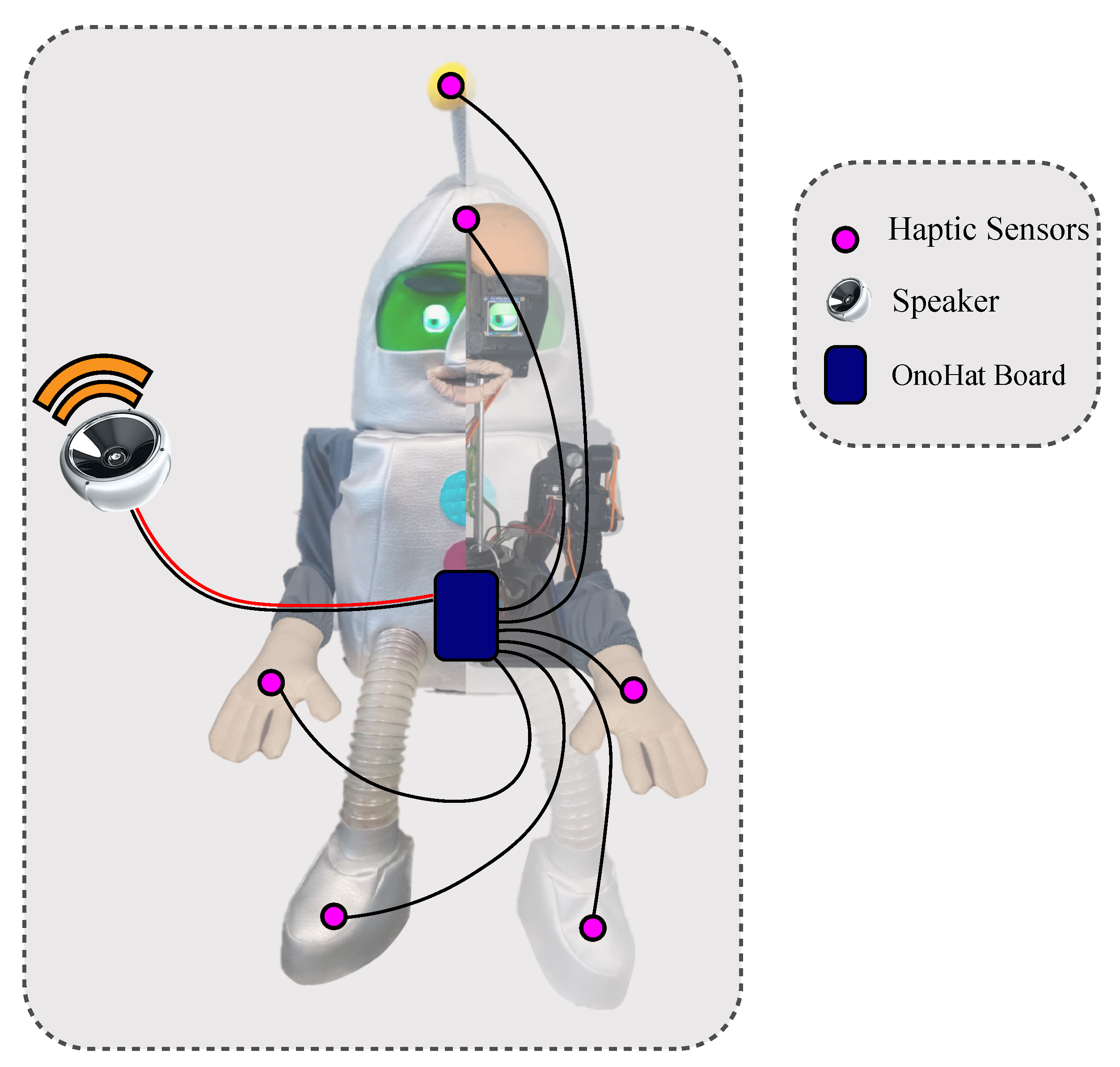
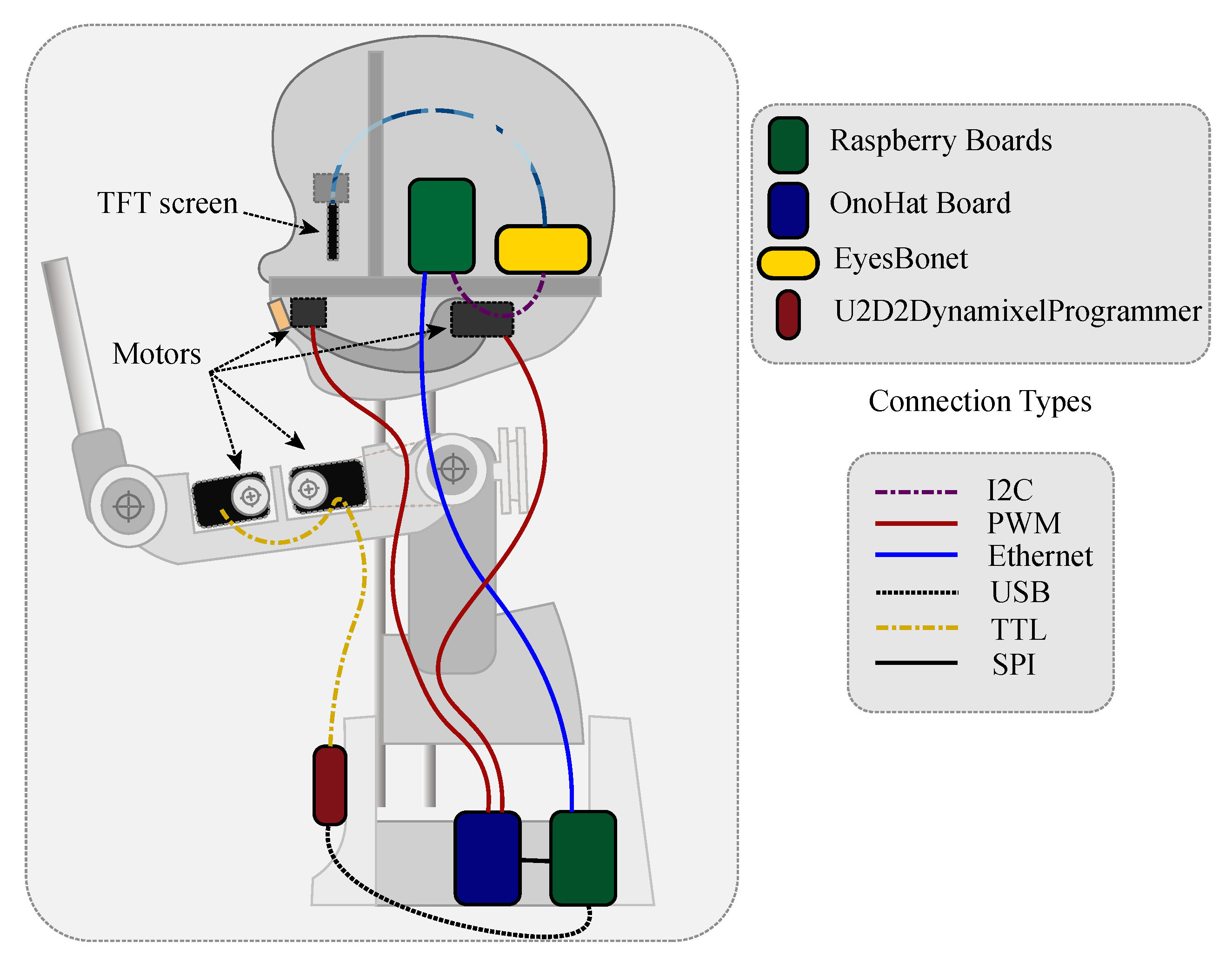
- Electronic System
3.1.3. Robot Functionalities
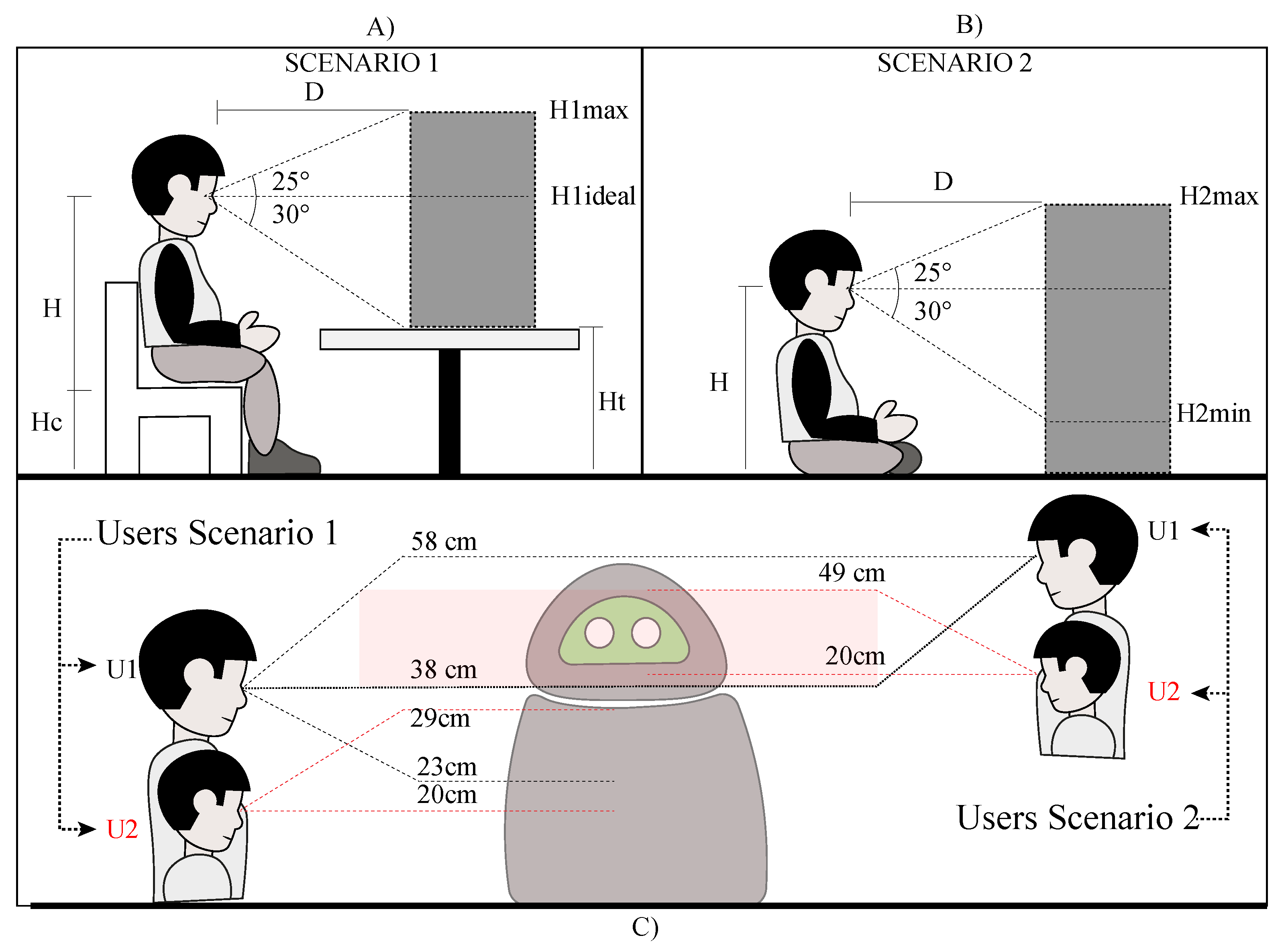
3.2. Experimental Study
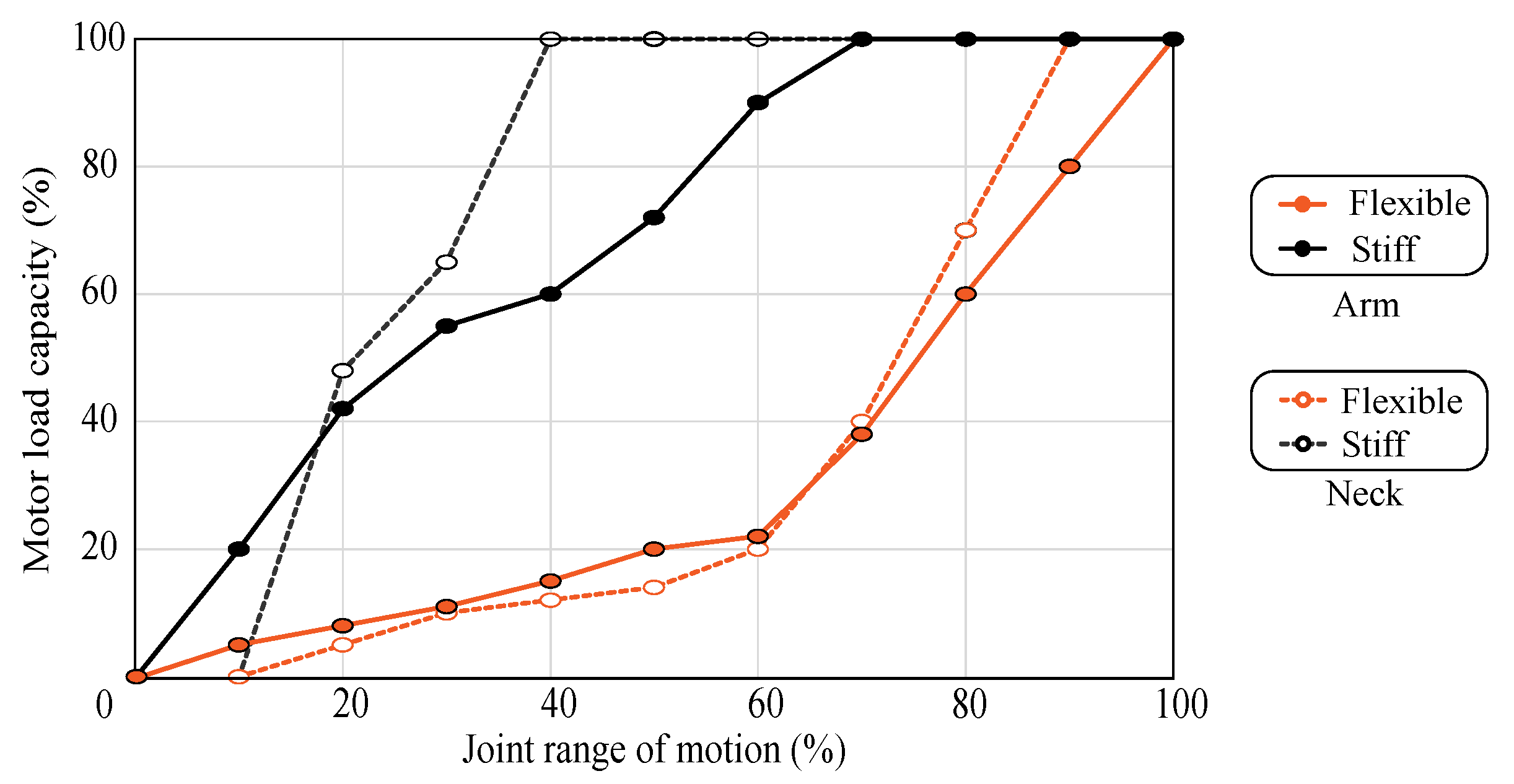
3.2.1. Mechanical Test
3.2.2. Case Study
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ASD | Autism spectrum disorder |
| CASTOR | CompliAnt SofT Robotics |
| CwASD | Children with ASD |
| ePTFE | Polytetrafluoroethylene |
| DOF | Degree of freedom |
| HMPE | Polyethylene |
| PD | Participatory design |
| PLA | Polylactic acid |
| ROM | Range of motion |
| ROS | Robotic Operating System |
| SAR | Social assistance robotics |
| SEA | Series elastic actuator |
| TPE | Thermoplastic elastomer |
| TPU | Thermoplastic polyurethane |
References
- Cifuentes, C.A.; Pinto, M.J.; Céspedes, N.; Múnera, M. Social Robots in Therapy and Care. Curr. Robot. Rep. 2020, 1, 59–74. [Google Scholar] [CrossRef]
- Baio, J.; Wiggins, L.; Christensen, D.L.; Maenner, M.J.; Daniels, J.; Warren, Z.; Kurzius-Spencer, M.; Zahorodny, W.; Robinson, C.; Rosenberg, C.R.; et al. Prevalence of Autism Spectrum Disorder Among Children Aged 8 Years—Autism and Developmental Disabilities Monitoring Network, 11 Sites, United States, 2014. MMWR Surveill. Summ. 2018, 67, 1–23. [Google Scholar] [CrossRef] [PubMed]
- World Health Organization. Autism spectrum disorders. In Fact Sheets; WHO: Geneva, Switzerland, 2018. [Google Scholar]
- Eggebrecht, A.T.; Elison, J.T.; Feczko, E.; Todorov, A.; Wolff, J.J.; Kandala, S.; Adams, C.M.; Snyder, A.Z.; Lewis, J.D.; Estes, A.M.; et al. Joint attention and brain functional connectivity in infants and toddlers. Cereb. Cortex 2017, 27, 1709–1720. [Google Scholar] [CrossRef] [PubMed]
- American Psychiatric Association. DSM-5 Diagnostic Classification. In Diagnostic and Statistical Manual of Mental Disorders; American Psychiatric Association: Washington, DC, USA, 2013. [Google Scholar] [CrossRef]
- Belpaeme, T.; Baxter, P.E.; Read, R.; Wood, R.; Cuayáhuitl, H.; Kiefer, B.; Racioppa, S.; Kruijff-Korbayová, I.; Athanasopoulos, G.; Enescu, V.; et al. Multimodal Child-Robot Interaction: Building Social Bonds. J. Hum. Robot. Interact. 2012, 1, 33–53. [Google Scholar] [CrossRef] [Green Version]
- Cabibihan, J.J.; Javed, H.; Ang, M.; Aljunied, S.M. Why Robots? A Survey on the Roles and Benefits of Social Robots in the Therapy of Children with Autism. Int. J. Soc. Robot. 2013, 5, 593–618. [Google Scholar] [CrossRef]
- Pennisi, P.; Tonacci, A.; Tartarisco, G.; Billeci, L.; Ruta, L.; Gangemi, S.; Pioggia, G. Autism and social robotics: A systematic review. Autism Res. 2016, 9, 165–183. [Google Scholar] [CrossRef]
- Di Nuovo, A.; Conti, D.; Trubia, G.; Buono, S.; Di Nuovo, S. Deep learning systems for estimating visual attention in robot-assisted therapy of children with autism and intellectual disability. Robotics 2018, 7, 25. [Google Scholar] [CrossRef] [Green Version]
- Ramirez-Duque, A.A.; Frizera-Neto, A.; Bastos, T.F. Robot-Assisted Diagnosis for Children with Autism Spectrum Disorder Based on Automated Analysis of Nonverbal Cues. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 456–461. [Google Scholar] [CrossRef]
- Anzalone, S.M.; Xavier, J.; Boucenna, S.; Billeci, L.; Narzisi, A.; Muratori, F.; Cohen, D.; Chetouani, M. Quantifying patterns of joint attention during human-robot interactions: An application for autism spectrum disorder assessment. Pattern Recognit. Lett. 2019, 118, 42–50. [Google Scholar] [CrossRef]
- Del Coco, M.; Leo, M.; Carcagni, P.; Fama, F.; Spadaro, L.; Ruta, L.; Pioggia, G.; Distante, C. Study of Mechanisms of Social Interaction Stimulation in Autism Spectrum Disorder by Assisted Humanoid Robot. IEEE Trans. Cogn. Dev. Syst. 2017, 8920, 1. [Google Scholar] [CrossRef]
- Yun, S.S.; Choi, J.; Park, S.K.; Bong, G.Y.; Yoo, H. Social skills training for children with autism spectrum disorder using a robotic behavioural intervention system. Autism Res. 2017, 10, 1306–1323. [Google Scholar] [CrossRef]
- Zheng, Z.; Das, S.; Young, E.M.; Swanson, A.; Warren, Z.E.; Sarkar, N. Autonomous robot-mediated imitation learning for children with autism. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2707–2712. [Google Scholar] [CrossRef]
- Costescu, C.A.; Vanderborght, B.; David, D.O. Reversal Learning Task in Children with Autism Spectrum Disorder: A Robot-Based Approach. J. Autism Dev. Disord. 2014, 45, 3715–3725. [Google Scholar] [CrossRef] [PubMed]
- Kim, E.S.; Berkovits, L.D.; Bernier, E.P.; Leyzberg, D.; Shic, F.; Paul, R.; Scassellati, B. Social robots as embedded reinforcers of social behaviour in children with autism. J. Autism Dev. Disord. 2013, 43, 1038–1049. [Google Scholar] [CrossRef] [PubMed]
- Feil-Seifer, D.; Mataric, M. Automated detection and classification of positive vs. negative robot interactions with children with autism using distance-based features. In Proceedings of the 6th International Conference on Human-Robot Interaction-HRI ’11, Lausanne, Switzerland, 8–11 March 2011; p. 323. [Google Scholar] [CrossRef] [Green Version]
- Vallès-Peris, N.; Angulo, C.; Domènech, M. Children’s imaginaries of human-robot interaction in healthcare. Int. J. Environ. Res. Public Health 2018, 15, 970. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Randall, N.; Bennett, C.C.; Šabanović, S.; Nagata, S.; Eldridge, L.; Collins, S.; Piatt, J.A. More than just friends: In-home use and design recommendations for sensing socially assistive robots (SARs) by older adults with depression. Paladyn 2019, 10, 237–255. [Google Scholar] [CrossRef] [Green Version]
- Nakadoi, Y. Usefulness of Animal Type Robot Assisted Therapy for Autism Spectrum Disorder in the Child and Adolescent Psychiatric Ward. In New Frontiers in Artificial Intelligence; Otake, M., Kurahashi, S., Ota, Y., Satoh, K., Bekki, D., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 478–482. [Google Scholar]
- Bartneck, C.; Belpaeme, T.; Eyssel, F.; Kanda, T.; Keijsers, M.; Šabanović, S. Human-Robot Interaction: An Introduction; Cambridge University Press: Cambridge, UK, 2020. [Google Scholar]
- Fletcher-Watson, S.; Adams, J.; Brook, K.; Charman, T.; Crane, L.; Cusack, J.; Leekam, S.; Milton, D.; Parr, J.R.; Pellicano, E. Making the future together: Shaping autism research through meaningful participation. Autism 2018, 1–11. [Google Scholar] [CrossRef]
- Merter, S.; Hasırcı, D. A participatory product design process with children with autism spectrum disorder. CoDesign 2016, 14, 170–187. [Google Scholar] [CrossRef]
- Huijnen, C.A.G.J.; Lexis, M.A.S.; Jansens, R.; de Witte, L.P. Mapping Robots to Therapy and Educational Objectives for Children with Autism Spectrum Disorder. J. Autism Dev. Disord. 2016, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Simut, R.; Vanderfaeillie, J.; Peca, A.; Van de Perre, G.; Vanderborght, B. Children with Autism Spectrum Disorders Make a Fruit Salad with Probo, the Social Robot: An Interaction Study. J. Autism Dev. Disord. 2016, 46, 113–126. [Google Scholar] [CrossRef]
- Wood, L.J.; Robins, B.; Lakatos, G.; Syrdal, D.S.; Zaraki, A.; Dautenhahn, K. Developing a protocol and experimental setup for using a humanoid robot to assist children with autism to develop visual perspective taking skills. Paladyn 2019, 10, 167–179. [Google Scholar] [CrossRef]
- Ramírez-Duque, A.A.; Aycardi, L.F.; Villa, A.; Munera, M.; Bastos, T.; Belpaeme, T.; Frizera-Neto, A.; Cifuentes, C.A. Collaborative and Inclusive Process with the Autism Community: A Case Study in Colombia About Social Robot Design. Int. J. Soc. Robot. 2020. [Google Scholar] [CrossRef] [Green Version]
- Argall, B.D.; Billard, A.G. A survey of Tactile HumanRobot Interactions. Robot. Auton. Syst. 2010, 58, 1159–1176. [Google Scholar] [CrossRef] [Green Version]
- Libin, A.; Libin, E. Person-robot interactions from the robopsychologists’ point of view: The robotic psychology and robotherapy approach. Proc. IEEE 2004, 92, 1789–1803. [Google Scholar] [CrossRef]
- Stiehl, W.; Lieberman, J.; Breazeal, C.; Basel, L.; Lalla, L.; Wolf, M. Design of a therapeutic robotic companion for relational, affective touch. In Proceedings of the ROMAN 2005 IEEE International Workshop on Robot and Human Interactive Communication, Nashville, TN, USA, 13–15 August 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 408–415. [Google Scholar] [CrossRef]
- Iocchi, L.; L, M.T.; Jeanpierre, L. Interaction for Social Robots Assisting Users in Shopping Malls. Int. Conf. Soc. Robot. 2015, 1, 264–274. [Google Scholar] [CrossRef]
- Srinivasan, S.M.; Eigsti, I.M.; Neelly, L.; Bhat, A.N. The effects of embodied rhythm and robotic interventions on the spontaneous and responsive social attention patterns of children with autism spectrum disorder (ASD): A pilot randomized controlled trial. Res. Autism Spectr. Disord. 2016, 27, 54–72. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chevalier, P.; Martin, J.C.; Isableu, B.; Bazile, C.; Iacob, D.O.; Tapus, A. Joint Attention using Human-Robot Interaction: Impact of sensory preferences of children with autism. In Proceedings of the 25th IEEE International Symposium on Robot and Human Interactive Communication, RO-MAN 2016, New York, NY, USA, 26–31 August 2016; pp. 849–854. [Google Scholar] [CrossRef]
- So, W.C.; Wong, M.K.Y.; Lam, C.K.Y.; Lam, W.Y.; Chui, A.T.F.; Lee, T.L.; Ng, H.M.; Chan, C.H.; Fok, D.C.W. Using a social robot to teach gestural recognition and production in children with autism spectrum disorders. Disabil. Rehabil. Assist. Technol. 2018, 13, 527–539. [Google Scholar] [CrossRef] [PubMed]
- David, D.O.; Costescu, C.A.; Matu, S.; Szentagotai, A.; Dobrean, A. Developing Joint Attention for Children with Autism in Robot-Enhanced Therapy. Int. J. Soc. Robot. 2018, 10, 595–605. [Google Scholar] [CrossRef]
- Zheng, Z.; Zhao, H.; Swanson, A.R.; Weitlauf, A.S.; Warren, Z.E.; Sarkar, N. Design, Development, and Evaluation of a Noninvasive Autonomous Robot-Mediated Joint Attention Intervention System for Young Children with ASD. IEEE Trans. Hum. Mach. Syst. 2018, 48, 125–135. [Google Scholar] [CrossRef]
- Ramírez-Duque, A.A.; Bastos, T.; Munera, M.; Cifuentes, C.A.; Frizera-Neto, A. Robot-Assisted Intervention for children with special needs: A comparative assessment for autism screening. Robot. Auton. Syst. 2020, 127, 103484. [Google Scholar] [CrossRef]
- Dautenhahn, K.; Nehaniv, C.L.; Walters, M.L.; Robins, B.; Kose-Bagci, H.; Mirza, N.A.; Blow, M. KASPAR—A Minimally Expressive Humanoid Robot for Human–Robot Interaction Research. Appl. Bionics Biomech. 2009, 6, 369–397. [Google Scholar] [CrossRef] [Green Version]
- Robins, B.; Dautenhahn, K. Developing play scenarios for tactile interaction with a humanoid robot: A case study exploration with children with autism. In International Conference on Social Robotics; Springer: Berlin/Heidelberg, Germany, 2010; pp. 243–252. [Google Scholar]
- Wainer, J.; Dautenhahn, K.; Robins, B.; Amirabdollahian, F. Collaborating with Kaspar: Using an autonomous humanoid robot to foster cooperative dyadic play among children with autism. In Proceedings of the 2010 10th IEEE-RAS International Conference on Humanoid Robots, Nashville, TN, USA, 6–8 December 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 631–638. [Google Scholar] [CrossRef] [Green Version]
- Costa, S.; Lehmann, H.; Dautenhahn, K.; Robins, B.; Soares, F. Using a humanoid robot to elicit body awareness and appropriate physical interaction in children with autism. Int. J. Soc. Robot. 2015, 7, 265–278. [Google Scholar] [CrossRef] [Green Version]
- Peca, A.; Simut, R.; Pintea, S.; Vanderborght, B. Are Children with ASD more Prone to Test the Intentions of the Robonova Robot Compared to a Human? Int. J. Soc. Robot. 2015, 7, 629–639. [Google Scholar] [CrossRef]
- Hanson, D.; Mazzei, D.; Garver, C.; Ahluwalia, A.; De Rossi, D.; Stevenson, M.; Reynolds, K. Realistic Humanlike Robots for Treatment of Autism. In Proceedings of the 5th International Conference on Pervasive Technologies Related to Assistive Environments PETRA, Corfu, Greece, 26–29 June 2012; pp. 1–7. [Google Scholar]
- Vandevelde, C.; Saldien, J.; Ciocci, M.C.; Vanderborght, B. The use of social robot ono in robot assisted therapy. In Proceedings of the International Conference on Social Robotics, Bristol, UK, 27–29 October 2013. [Google Scholar]
- Vandevelde, C.; Saldien, J.; Ciocci, C.; Vanderborght, B. Ono, a DIY open source platform for social robotics. In Proceedings of the 8th International Conference on Tangible, Embedded and Embodied Interaction, Munich, Germany, 16–19 February 2014. [Google Scholar]
- Goris, K.; Saldien, J.; Vanderborght, B.; Lefeber, D. Mechanical design of the huggable robot Probo. Int. J. Humanoid Robot. 2011, 8, 481–511. [Google Scholar] [CrossRef] [Green Version]
- Saldien, J.; Goris, K.; Yilmazyildiz, S.; Verhelst, W.; Lefeber, D. On the Design of the Huggable Robot Probo. J. Phys. Agents 2008, 2, 3–11. [Google Scholar] [CrossRef]
- Shibata, T.; Mitsui, T.; Wada, K.; Touda, A.; Kumasaka, T.; Tagami, K.; Tanie, K. Mental commit robot and its application to therapy of children. IEEE/ASME Int. Conf. Adv. Intell. Mechatron. AIM 2001, 2, 1053–1058. [Google Scholar] [CrossRef]
- Stiehl, W.D.; Lieberman, J.; Breazeal, C.; Basel, L.; Cooper, R.; Knight, H.; Lalla, L.; Maymin, A.; Purchase, S. The Huggable: A therapeutic robotic companion for relational, affective touch. In Proceedings of the 2006 3rd IEEE Consumer Communications and Networking Conference, CCNC 2006, Las Vegas, NV, USA, 8–10 January 2006; Volume 2, pp. 1290–1291. [Google Scholar] [CrossRef]
- Grunberg, D.; Ellenberg, R.; Kim, Y.E.; Oh, P.Y. From robonova to hubo: Platforms for robot dance. In FIRA RoboWorld Congress; Springer: Berlin/Heidelberg, Germany, 2009; pp. 19–24. [Google Scholar]
- Shamsuddin, S.; Yussof, H.; Ismail, L.I.; Mohamed, S.; Hanapiah, F.A.; Zahari, N.I. Initial Response in HRI-a Case Study on Evaluation of Child with Autism Spectrum Disorders Interacting with a Humanoid Robot NAO. Procedia Eng. 2012, 41, 1448–1455. [Google Scholar] [CrossRef]
- Tapus, A.; Peca, A.; Aly, A.; Pop, C.; Jisa, L.; Pintea, S.; Rusu, A.S.; David, D.O. Children with autism social engagement in interaction with Nao, an imitative robot—A series of single case experiments. Interact. Stud. 2012, 13, 315–347. [Google Scholar] [CrossRef]
- Robins, B.; Dautenhahn, K. Kaspar, the social robot and ways it may help children with autism—An overview. Enfance 2018, 2018, 91–102. [Google Scholar] [CrossRef]
- Mehrabian, A. Communication without words. Commun. Theory 2008, 6, 193–200. [Google Scholar]
- Samadiani, N.; Huang, G.; Cai, B.; Luo, W.; Chi, C.-H.; Xiang, Y.; He, J. A Review on Automatic Facial Expression Recognition Systems Assisted by Multimodal Sensor Data. Sensors 2019, 19, 1863. [Google Scholar] [CrossRef] [Green Version]
- Scassellati, B.; Admoni, H.; Matarić, M. Robots for Use in Autism Research. Annu. Rev. Biomed. Eng. 2012, 14, 275–294. [Google Scholar] [CrossRef] [Green Version]
- Ricks, D.J.; Colton, M.B. Trends and considerations in robot-assisted autism therapy. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 4354–4359. [Google Scholar]
- Belpaeme, T.; Kennedy, J.; Ramachandran, A.; Scassellati, B.; Tanaka, F. Social robots for education: A review. Sci. Robot. 2018, 3, eaat5954. [Google Scholar] [CrossRef] [Green Version]
- Admoni, H.; Scassellati, B. Social eye gaze in human-robot interaction: A review. J. Hum.-Robot. Interact. 2017, 6, 25–63. [Google Scholar] [CrossRef] [Green Version]
- Welch, K.C.; Lahiri, U.; Warren, Z.; Sarkar, N. An approach to the design of socially acceptable robots for children with autism spectrum disorders. Int. J. Soc. Robot. 2010, 2, 391–403. [Google Scholar] [CrossRef]
- Marino, F.; Chilà, P.; Sfrazzetto, S.T.; Carrozza, C.; Crimi, I.; Failla, C.; Busà, M.; Bernava, G.; Tartarisco, G.; Vagni, D.; et al. Outcomes of a robot-assisted social-emotional understanding intervention for young children with autism spectrum disorders. J. Autism Dev. Disord. 2020, 50, 1973–1987. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.; Kim, M.; Kim, Y.J.; Hong, N.; Ryu, S.; Kim, H.J.; Kim, S. Soft robot review. Int. J. Control. Autom. Syst. 2017, 15, 3–15. [Google Scholar] [CrossRef]
- Pratt, G.A.; Williamson, M.M. Series elastic actuators. IEEE Int. Conf. Intell. Robot. Syst. 1995, 1, 399–406. [Google Scholar] [CrossRef] [Green Version]
- Gomez, R.; Szapiro, D.; Galindo, K.; Nakamura, K. Haru: Hardware design of an experimental tabletop robot assistant. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 233–240. [Google Scholar]
- Hopkins, J.B.; Culpepper, M.L. Synthesis of multi-degree of freedom, parallel flexure system concepts via Freedom and Constraint Topology (FACT)—Part I: Principles. Precis. Eng. 2010, 34, 259–270. [Google Scholar] [CrossRef]
- Ma, X.; Quek, F. Development of a child-oriented social robot for safe and interactive physical interaction. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 2163–2168. [Google Scholar]
- Stoelen, M.F.; Bonsignorio, F.; Cangelosi, A. Co-exploring actuator antagonism and bio-inspired control in a printable robot arm. In International Conference on Simulation of Adaptive Behavior; Springer: Berlin/Heidelberg, Germany, 2016; pp. 244–255. [Google Scholar]
- Petit, F.; Friedl, W.; Höppner, H.; Grebenstein, M. Analysis and synthesis of the bidirectional antagonistic variable stiffness mechanism. IEEE/ASME Trans. Mechatron. 2014, 20, 684–695. [Google Scholar] [CrossRef]
- Casas, J.; Leal-Junior, A.; Díaz, C.R.; Frizera, A.; Múnera, M.; Cifuentes, C.A. Large-range polymer optical-fibre strain-gauge sensor for elastic tendons in wearable assistive robots. Materials 2019, 12, 1443. [Google Scholar] [CrossRef] [Green Version]
- Clayton, H.M.; Lanovaz, J.; Schamhardt, H.; Willemen, M.; Colborne, G. Net joint moments and powers in the equine forelimb during the stance phase of the trot. Equine Vet. J. 1998, 30, 384–389. [Google Scholar] [CrossRef]
- Tronick, E.Z.; Morelli, G.A.; Ivey, P.K. The Efe forager infant and toddler’s pattern of social relationships: Multiple and simultaneous. Dev. Psychol. 1992, 28, 568. [Google Scholar] [CrossRef]
Sample Availability: Samples of the mechanical trials and the case study are available from the authors. |















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Robot | DOFs | Type | Actuation | Sensors | Materials | Facial Expressions | Functionalities |
|---|---|---|---|---|---|---|---|
| CASTOR | Total: 14 mouth: 3 eyebrows: 2 neck: 1 shoulders: 2 × 2 elbows: 1 × 2 passive: 2 | Humanoid | SEA | -Tactile sensors | Low-cost 3D- printed and PLA | Yes | -Display facial expressions including happy, sad, angry, and surprise -Answer with a sentence, sound, movement, or a combination of them when the sensor is activated -Arm and head active movements |
| KASPAR [38,41] | Total: 17 mouth: 2 eyes: 2 eyelids: 1 neck: 3 arms: 4 × 2 torso: 1 | Humanoid | Stiff | -Cameras in eyes -Force sensor resistor | Fibreglass body, aluminium frame and head parts, silicone rubber face | Yes | -Detection of faces and objects -Minimally expressive face and arms able to produce gestures -Answer with a sentence and classifies the force when the force sensitive sensor (FSR) is activated -Arm and head active movements |
| NAO [9,34] | Total: 25 head: 2 arms: 5 × 2 hand: 1 × 2 pelvis: 1 legs: 5 × 2 | Humanoid | Stiff | -OmniVision cameras -Inertial sensor -Sonar range finder -Infrared sensors -Tactile sensors -Pressure sensors -Microphones | Polycarbonate-ABS plastic, polyamide, and carbon fibre- reinforced thermoplastic | Yes | -Detection of faces and objects -Walking capabilities and grasping/gestural hands and arms -Perform different gestures and play audio clips while gesturing -Arm, leg, and head active movements |
| Zeno [43] | Total: 36 face: 8 neck: 3 arms: 12 waist: 1 legs: 12 | Humanoid | Stiff | -Cameras in eyes -Gyroscope -Accelerometer -Compass -Load sensor -Encoder -Cliff sensors -Ground contact sensors -Infrared sensors -Bump sensors (feet) -Grip-load sensors -Microphones | Frubber, plastic, and aluminium | Yes | -Detection of faces and objects -Walking capabilities and grasping/gestural hands and arms -Display naturalistic expressions including happy, sad, angry, disgust, fear, surprise, and neutral -Arm, leg, and head active movements |
| ONO [44,45] | Total: 13 face: 13 | Humanoid | Stiff | -Tactile sensors | Polyurethane foam | Yes | -Display facial expressions including happy, sad, angry, and surprise -Answer with a sentence, a sound, or a combination of them when the sensor is activated |
| Probo [46,47] | Total: 20 head: 3 mouth: 3 eyes: 3 eyelids: 2 eyebrows: 4 ears: 2 torso: 3 | Pet-like | SEA | -Camera -Tactile sensors -Microphones | Body covered with FlexFoam-iT! X and cotton fabric | Yes | -Detection of faces and objects -Detection of the direction and intensity of sounds -Locates the place where it is touched and the strength of the touch -Arm and head active movements |
| Paro [48] | Total: 7 eyelids: 1 × 2 neck: 2 flipper: 1 × 2 tail: 1 | Pet-like | Stiff | -Light sensors -Temperature sensors -Tactile sensors -Microphones | Plastic skeleton and body covered with soft white fur | No | -Light and dark recognition -Recognize voice and sound direction -Respond to touch and classifies it as caress or blow |
| Huggable Bear [30,49] | Total: 8 eyebrows: 2 ears: 1 neck: 3 arms: 2 | Pet-like | Stiff and compliant mechanisms | -Cameras in eyes -Temperature sensors -Force sensors -Electric field sensors | Body covered with soft fur | No | -Detection of faces -The combination of multiple sensors determines the position and if it is being touched by a person or by an object |
| Robonova [42,50] | Total: 16 arms: 3 × 2 legs: 5 × 2 | Humanoid | Stiff | -Infrared sensors | Anodised aluminium plates | No | -Arm and leg active movements |
| Variable | Description | Range (cm) |
|---|---|---|
| H | Height from the base to eyes | 43–67 |
| Chair height | 30–40 | |
| Table height | 63–76 | |
| Maximum robot height Scenario 1 | 29–67 | |
| Minimal height Scenario 1 | 20–38 | |
| Maximum height Scenario 2 | 49–95 | |
| Minimal height Scenario 2 | 38–40 | |
| D | Distance front face object | 35–62 |
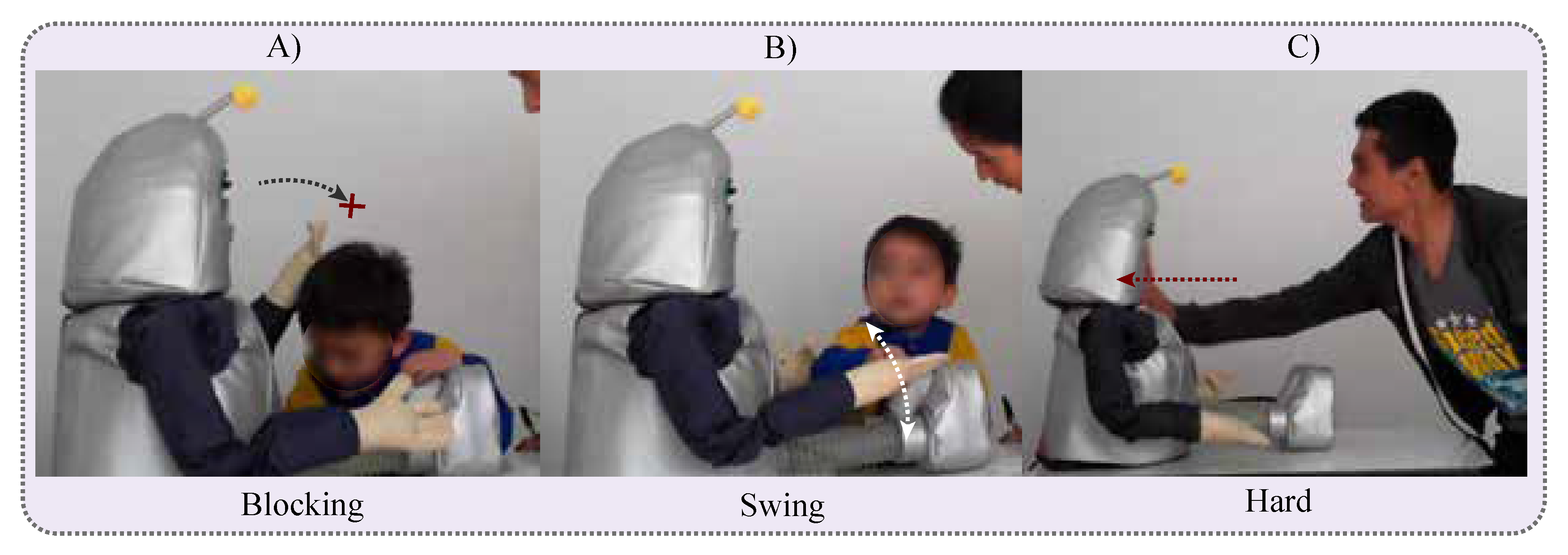
| Blocking | Swing | Hard | ||||||
|---|---|---|---|---|---|---|---|---|
| Time (s) | Qty | Time (s) | Qty | Time (s) | Qty | Total | ||
| Interaction (%) | Communication | |||||||
| Subject 1 (S1) | 21 | 8 | 28 | 7 | 41 | 14 | 36.4 | yes |
| Subject 2 (S2) | 15 | 5 | 8 | 3 | 12 | 6 | 19.6 | yes |
| Subject 3 (S3) | 0 | 0 | 0 | 0 | 4 | 3 | 1.7 | no |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Casas-Bocanegra, D.; Gomez-Vargas, D.; Pinto-Bernal, M.J.; Maldonado, J.; Munera, M.; Villa-Moreno, A.; Stoelen, M.F.; Belpaeme, T.; Cifuentes, C.A. An Open-Source Social Robot Based on Compliant Soft Robotics for Therapy with Children with ASD. Actuators 2020, 9, 91. https://doi.org/10.3390/act9030091
Casas-Bocanegra D, Gomez-Vargas D, Pinto-Bernal MJ, Maldonado J, Munera M, Villa-Moreno A, Stoelen MF, Belpaeme T, Cifuentes CA. An Open-Source Social Robot Based on Compliant Soft Robotics for Therapy with Children with ASD. Actuators. 2020; 9(3):91. https://doi.org/10.3390/act9030091
Chicago/Turabian StyleCasas-Bocanegra, Diego, Daniel Gomez-Vargas, Maria J. Pinto-Bernal, Juan Maldonado, Marcela Munera, Adriana Villa-Moreno, Martin F. Stoelen, Tony Belpaeme, and Carlos A. Cifuentes. 2020. "An Open-Source Social Robot Based on Compliant Soft Robotics for Therapy with Children with ASD" Actuators 9, no. 3: 91. https://doi.org/10.3390/act9030091
APA StyleCasas-Bocanegra, D., Gomez-Vargas, D., Pinto-Bernal, M. J., Maldonado, J., Munera, M., Villa-Moreno, A., Stoelen, M. F., Belpaeme, T., & Cifuentes, C. A. (2020). An Open-Source Social Robot Based on Compliant Soft Robotics for Therapy with Children with ASD. Actuators, 9(3), 91. https://doi.org/10.3390/act9030091