Wireless Walking Paper Robot Driven by Magnetic Polymer Actuator

 ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Design of a Walking Soft Robot
2.2. Magnetic Polymer Actuator Materials
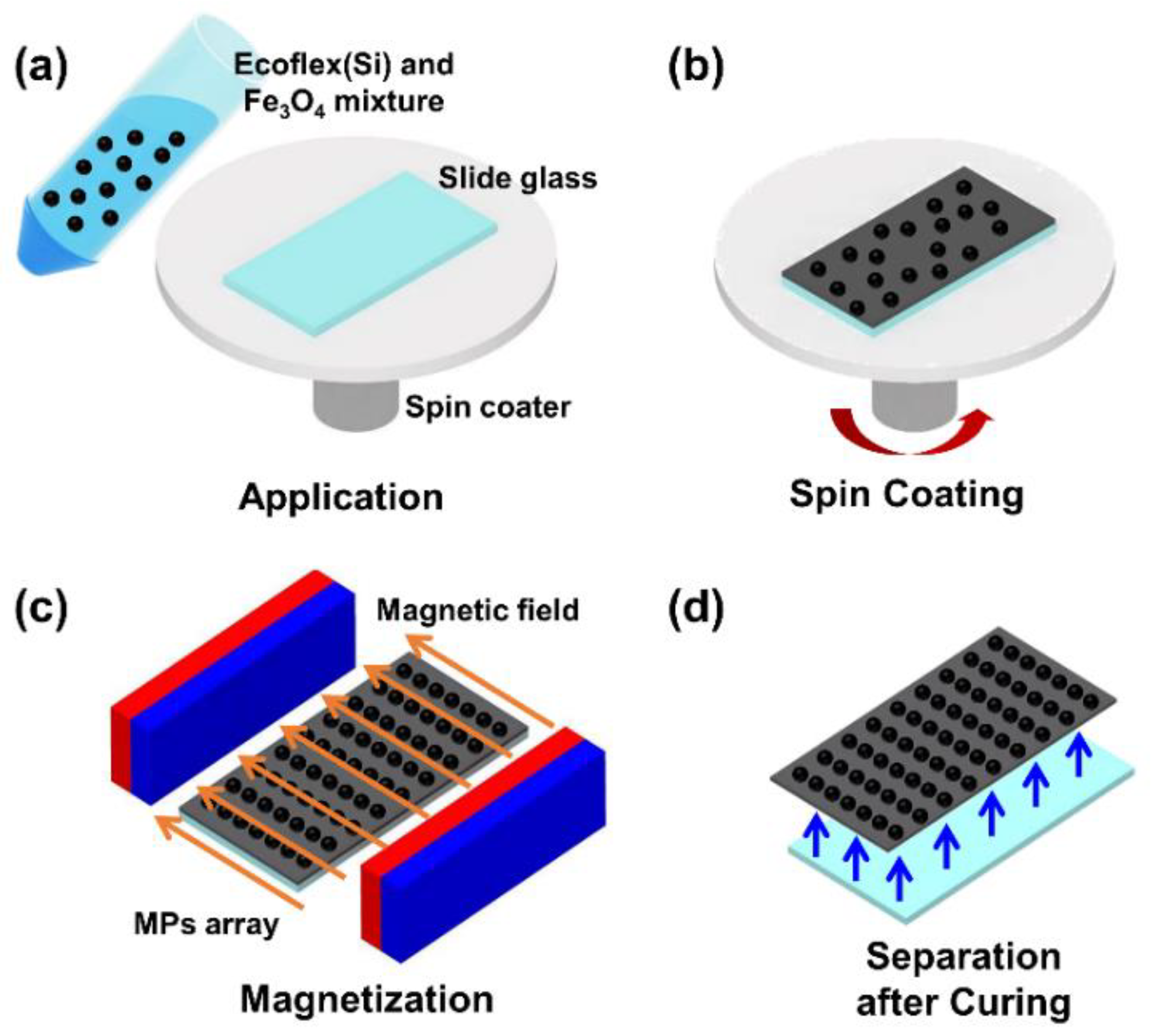
2.3. Fabrication of Magnetic Polymer Actuator
3. Characterization
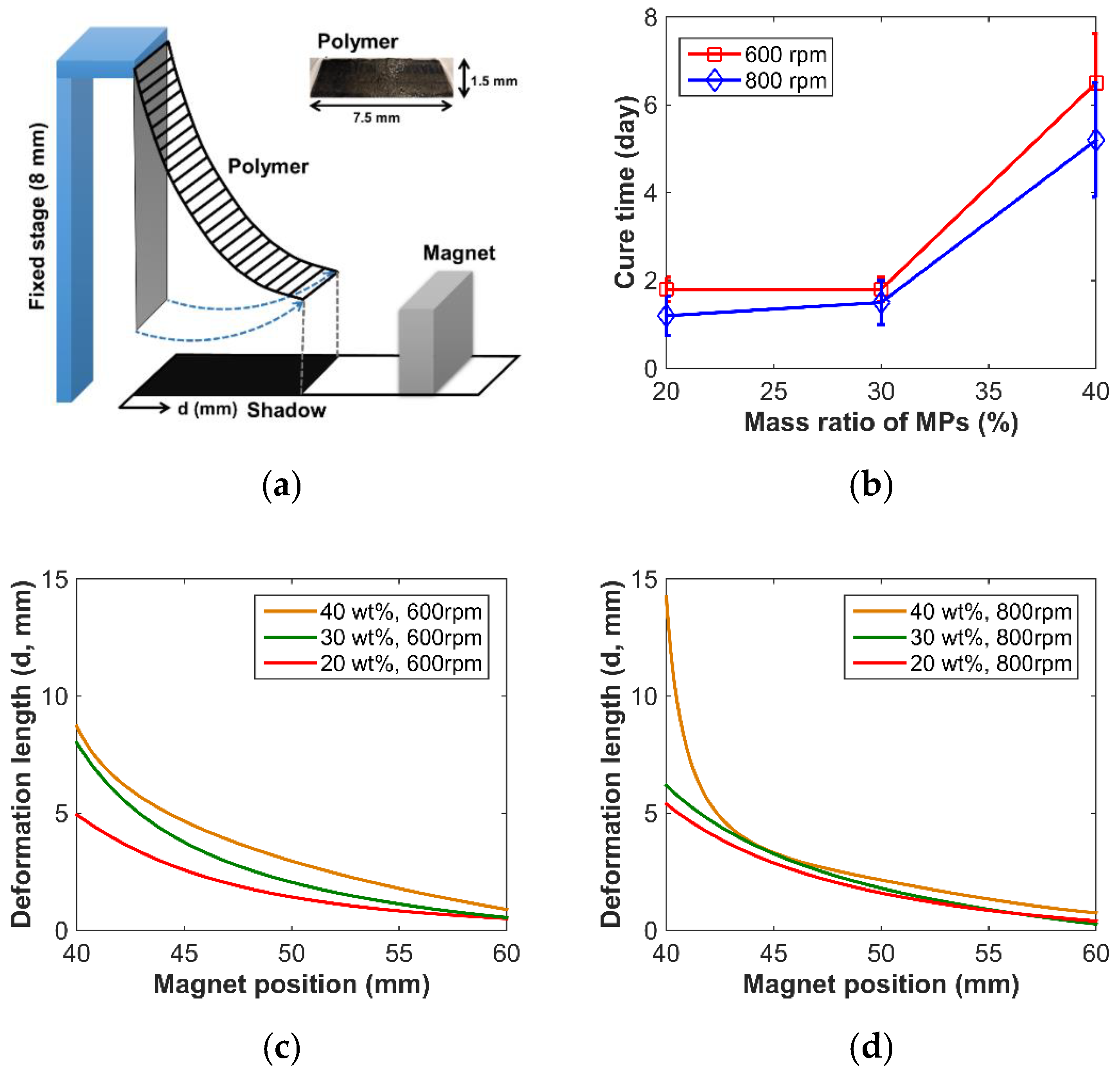
3.1. Magnetic Polymer Actuator
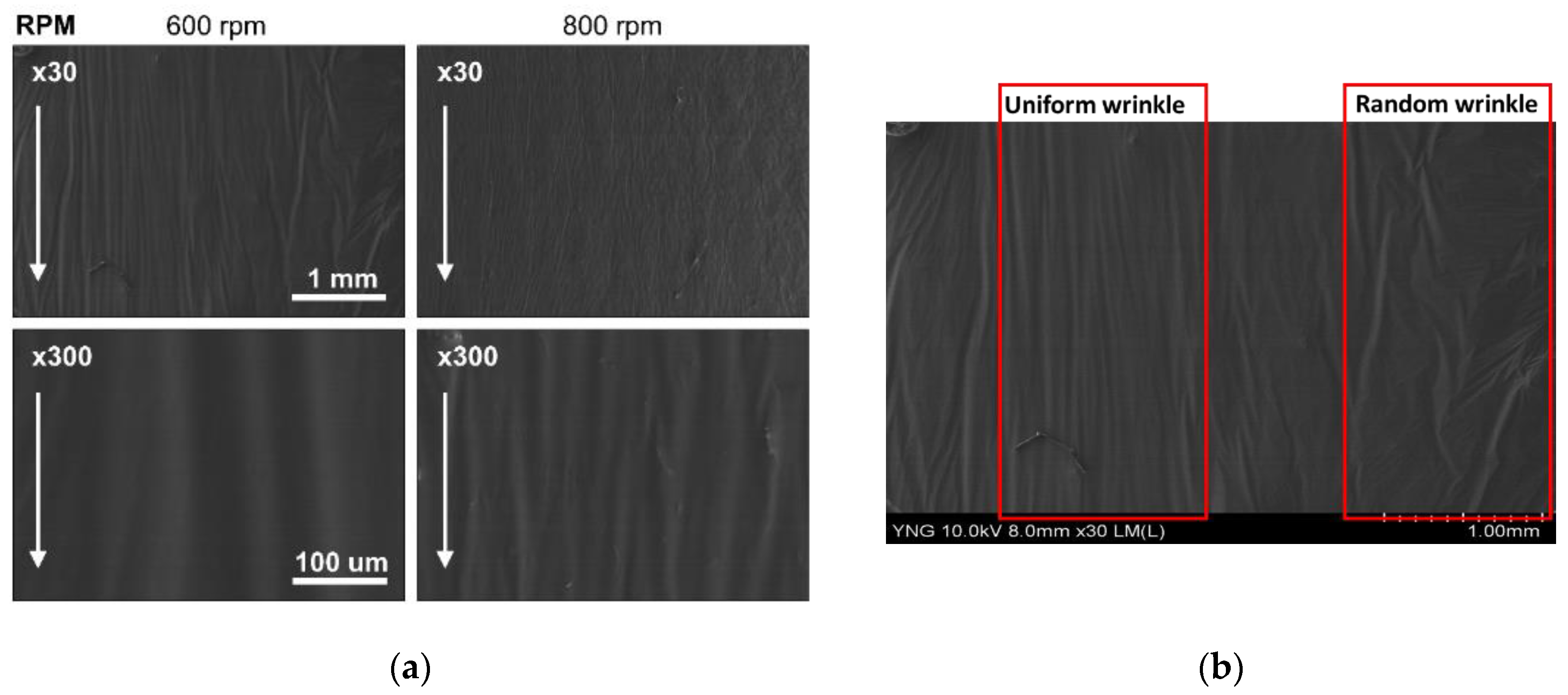
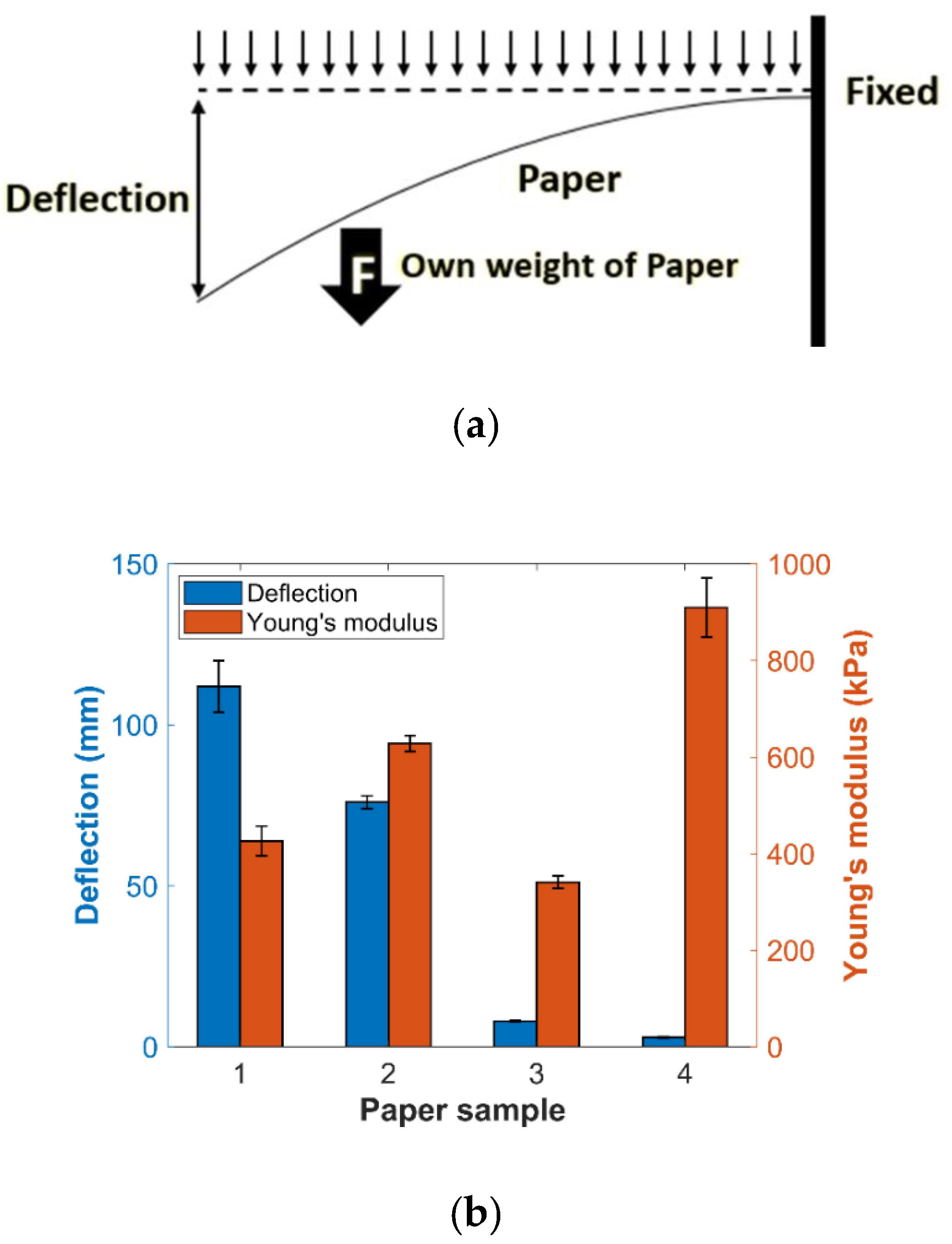
3.2. Paper Property
4. Simulation and Experiments
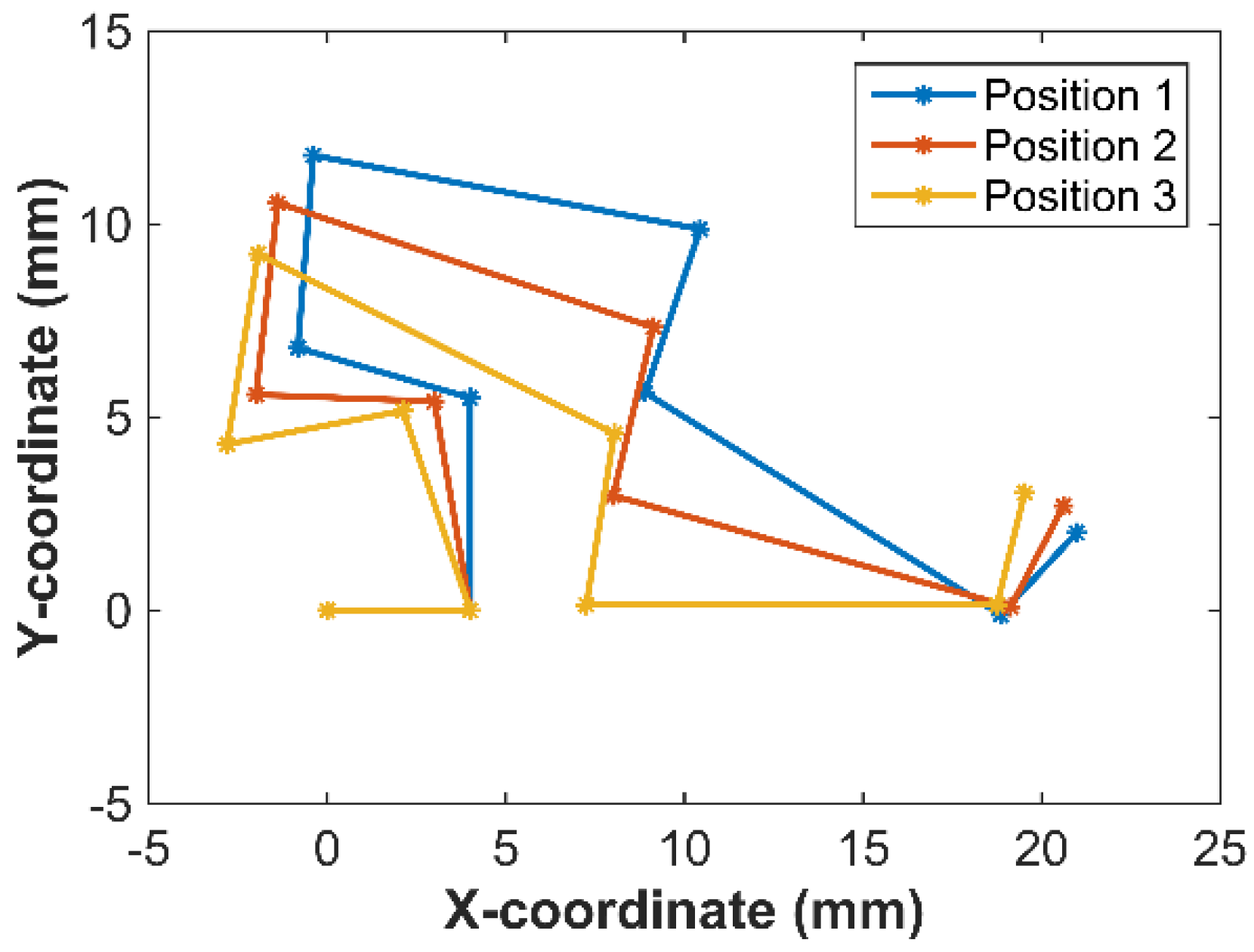
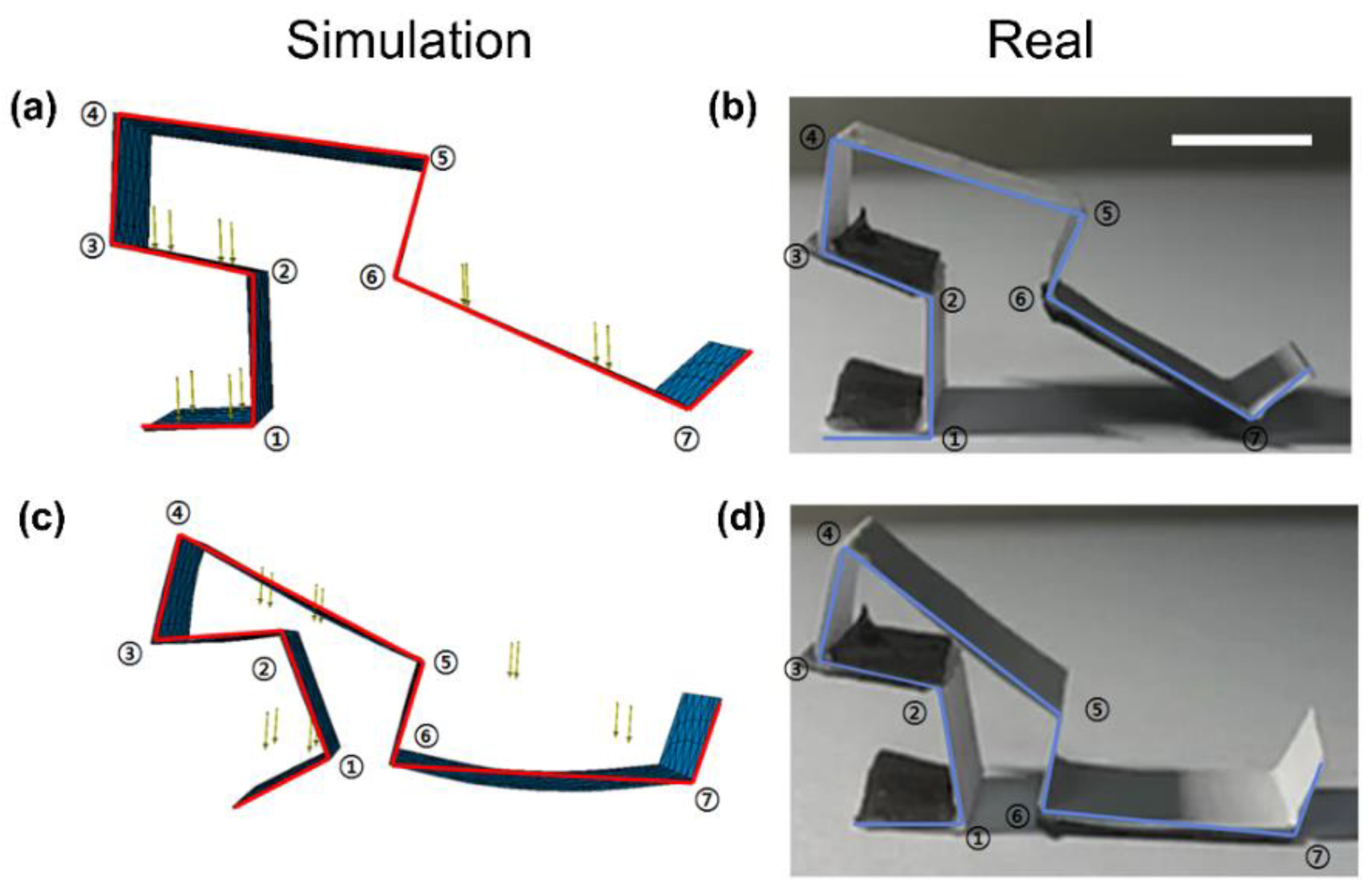
4.1. Robot Motion Simulation
4.2. Experimental Setup
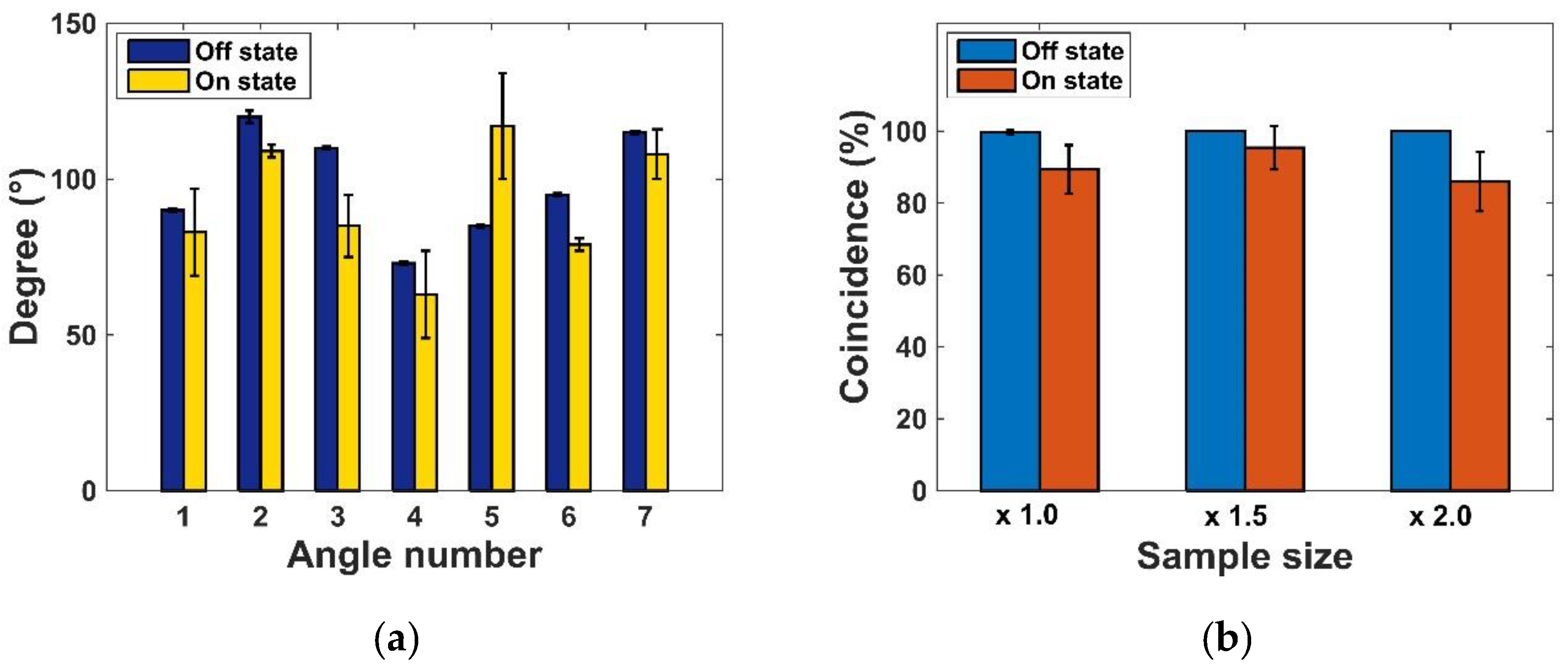
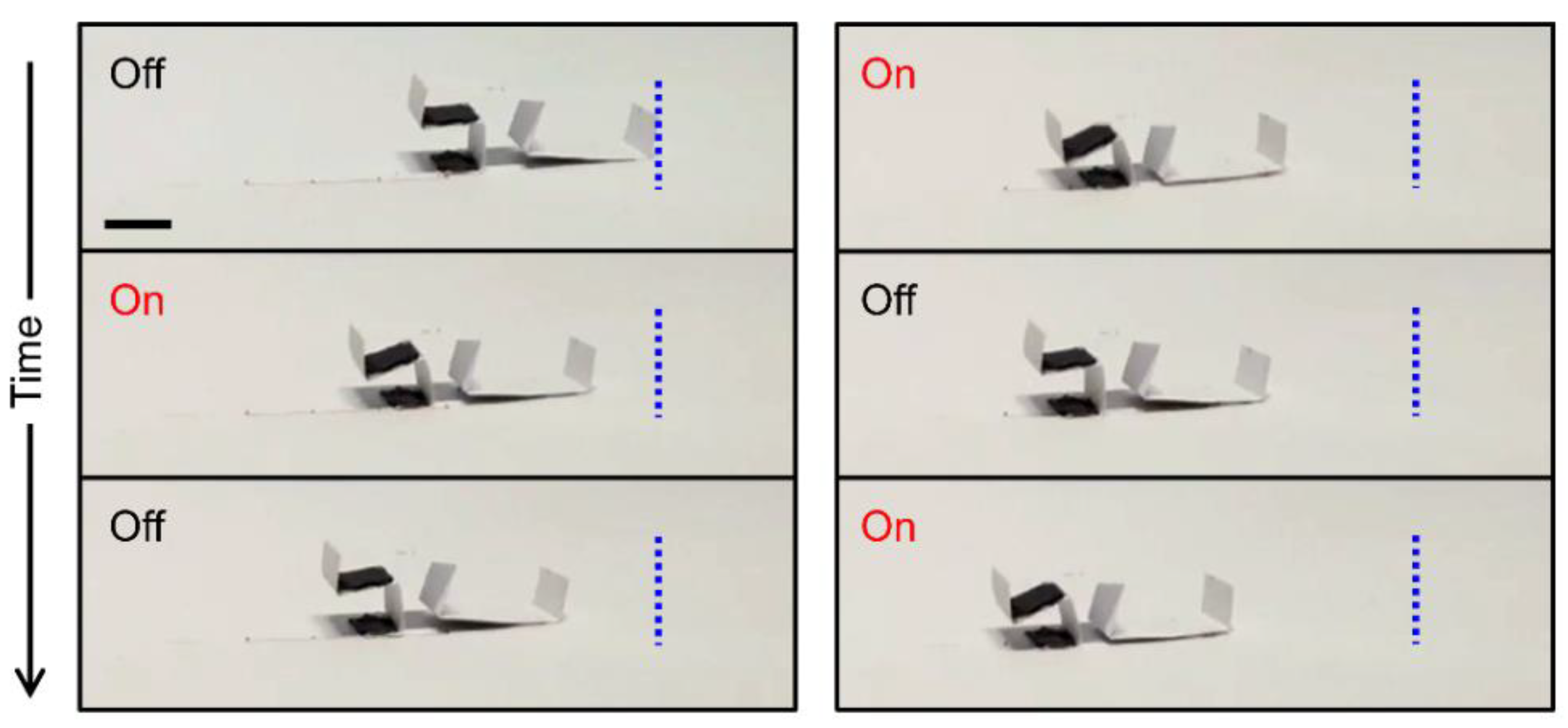
4.3. Experimental Results
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef] [PubMed]
- Ijaz, S.; Li, H.; Hoang, M.C.; Kim, C.S.; Bang, D.; Choi, E.; Park, J.O. Magnetically actuated miniature walking soft robot based on chained magnetic microparticles-embedded elastomer. Sens. Actuators A Phys. 2020, 301, 111707. [Google Scholar] [CrossRef]
- Lee, H.D.; Moon, J.I.; Kang, T.H. Design of a series elastic tendon actuator based on gait analysis for a walking assistance exosuit. Int. J. Control. Autom. Syst. 2019, 17, 2940–2947. [Google Scholar] [CrossRef]
- Yazdani, M.; Salarieh, H.; Foumani, M.S. Bio-inspired decentralized architecture for walking of a 5-link biped robot with compliant knee joints. Int. J. Control. Autom. Syst. 2018, 16, 2935–2947. [Google Scholar] [CrossRef]
- Ren, Z.; Hu, W.; Dong, X.; Sitti, M. Multi-functional soft-bodied jellyfish-like swimming. Nat. Commun. 2019, 10, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403. [Google Scholar] [CrossRef] [Green Version]
- Yuk, H.; Kim, D.; Lee, H.; Jo, S.; Shin, J.H. Shape memory alloy-based small crawling robots inspired by C. elegans. Bioinspir. Biomim. 2011, 6, 046002. [Google Scholar] [CrossRef]
- Wu, Y.; Yim, J.K.; Liang, J.; Shao, Z.; Qi, M.; Zhong, J.; Fearing, R.S. Insect-scale fast moving and ultrarobust soft robot. Sci. Robot. 2019, 4, eaax1594. [Google Scholar] [CrossRef] [Green Version]
- Joyee, E.B.; Pan, Y. Multi-material additive manufacturing of functional soft robot. Procedia Manuf. 2019, 34, 566–573. [Google Scholar] [CrossRef]
- Gray, B.L. A review of magnetic composite polymers applied to microfluidic devices. J. Electrochem. Soc. 2014, 161, B3173. [Google Scholar] [CrossRef]
- Venkiteswaran, V.K.; Samaniego, L.F.P.; Sikorski, J.; Misra, S. Bio-inspired terrestrial motion of magnetic soft millirobots. IEEE Robot. Autom. Lett. 2019, 4, 1753–1759. [Google Scholar] [CrossRef] [Green Version]
- Maeda, K.; Shinoda, H.; Tsumori, F. Miniaturization of worm-type soft robot actuated by magnetic field. Jpn. J. Appl. Phys. 2020, 59, SIIL04. [Google Scholar] [CrossRef]
- Rogóż, M.; Zeng, H.; Xuan, C.; Wiersma, D.S.; Wasylczyk, P. Light-driven soft robot mimics caterpillar locomotion in natural scale. Adv. Opt. Mater. 2016, 4, 1689–1694. [Google Scholar] [CrossRef]
- Pilz da Cunha, M.; Ambergen, S.; Debije, M.G.; Homburg, E.F.; den Toonder, J.M.; Schenning, A.P. A Soft Transporter Robot Fueled by Light. Adv. Sci. 2020, 7, 1902842. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, N.; Ishigami, G.; Hawthorne, S.; Chen, H.; Hansen, M.; Telleria, M.; Iagnemma, K. Design and analysis of a soft mobile robot composed of multiple thermally activated joints driven by a single actuator. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 5207–5212. [Google Scholar]
- Go, G.; Jin, Z.; Park, J.O.; Park, S. A Thermo-electromagnetically actuated microrobot for the targeted transport of therapeutic agents. Int. J. Control. Autom. Syst. 2018, 16, 1341–1354. [Google Scholar] [CrossRef]
- Shigemune, H.; Maeda, S.; Hara, Y.; Hosoya, N.; Hashimoto, S. Origami robot: A self-folding paper robot with an electrothermal actuator created by printing. IEEE/ASME Trans. Mechatron. 2016, 21, 2746–2754. [Google Scholar] [CrossRef]
- Shigemune, H.; Maeda, S.; Cacucciolo, V.; Iwata, Y.; Iwase, E.; Hashimoto, S.; Sugano, S. Printed paper robot driven by electrostatic actuator. IEEE Robot. Autom. Lett. 2017, 2, 1001–1007. [Google Scholar] [CrossRef]
- Han, D.D.; Zhang, Y.L.; Jiang, H.B.; Xia, H.; Feng, J.; Chen, Q.D.; Sun, H.B. Moisture-responsive graphene paper prepared by self-controlled photoreduction. Adv. Mater. 2015, 27, 332–338. [Google Scholar] [CrossRef]
- Huang, W.; Huang, X.; Majidi, C.; Jawed, M.K. Dynamic simulation of articulated soft robots. Nat. Commun. 2020, 11, 1–9. [Google Scholar] [CrossRef]
- Martinez, R.V.; Fish, C.R.; Chen, X.; Whitesides, G.M. Elastomeric origami: Programmable paper-elastomer composites as pneumatic actuators. Adv. Funct. Mater. 2012, 22, 1376–1384. [Google Scholar] [CrossRef]
- Hamedi, M.M.; Campbell, V.E.; Rothemund, P.; Güder, F.; Christodouleas, D.C.; Bloch, J.F.; Whitesides, G.M. Electrically activated paper actuators. Adv. Funct. Mater. 2016, 26, 2446–2453. [Google Scholar] [CrossRef]
- Amjadi, M.; Sitti, M. High-performance multiresponsive paper actuators. ACS Nano 2016, 10, 10202–10210. [Google Scholar] [CrossRef] [PubMed]
- Wang, G.; Cheng, T.; Do, Y.; Yang, H.; Tao, Y.; Gu, J.; Yao, L. Printed paper actuator: A low-cost reversible actuation and sensing method for shape changing interfaces. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–12. [Google Scholar]
- Ryu, J.; Mohammadifar, M.; Tahernia, M.; Chun, H.I.; Gao, Y.; Choi, S. Paper Robotics: Self-Folding, Gripping, and Locomotion. Adv. Mater. Technol. 2020, 5, 1901054. [Google Scholar] [CrossRef]
- Wu, Q.; Pradeep, V.; Liu, X. A paper-based wall-climbing robot enabled by electrostatic adhesion. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 315–320. [Google Scholar]
- Shigemune, H.; Maeda, S.; Hara, Y.; Koike, U.; Hashimoto, S. Kirigami robot: Making paper robot using desktop cutting plotter and inkjet printer. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1091–1096. [Google Scholar]
- Li, J.; Godaba, H.; Zhang, Z.Q.; Foo, C.C.; Zhu, J. A soft active origami robot. Extrem. Mech. Lett. 2018, 24, 30–37. [Google Scholar] [CrossRef]
- Nguyen, K.T.; Hoang, M.C.; Go, G.; Kang, B.; Choi, E.; Park, J.O.; Kim, C.S. Regularization-based independent control of an external electromagnetic actuator to avoid singularity in the spatial manipulation of a microrobot. Control Eng. Pract. 2020, 97, 104340. [Google Scholar] [CrossRef]
- Hoang, M.C.; Nguyen, K.T.; Le, V.H.; Kim, J.; Choi, E.; Kang, B.; Park, J.O.; Kim, C.S. Independent Electromagnetic Field Control for Practical Approach to Actively Locomotive Wireless Capsule Endoscope. IEEE Trans. Syst. MAN, Cybern. Syst. 2019, 99, 1–13. [Google Scholar] [CrossRef]
- Kim, J.; Nguyen, P.B.; Kang, B.; Choi, E.; Park, J.O.; Kim, C.S. A novel tip-positioning control of a magnetically steerable guidewire in sharply curved blood vessel for percutaneous coronary intervention. Int. J. Control. Autom. Syst. 2019, 17, 2069–2082. [Google Scholar] [CrossRef]
- Liu, J.A.C.; Gillen, J.H.; Mishra, S.R.; Evans, B.A.; Tracy, J.B. Photothermally and magnetically controlled reconfiguration of polymer composites for soft robotics. Sci. Adv. 2019, 5, eaaw2897. [Google Scholar] [CrossRef] [Green Version]
- Hoang, M.C.; Le, V.H.; Kim, J.; Choi, E.; Kang, B.; Park, J.O.; Kim, C.S. Intestinal Tattooing Mechanism Integrated with Active Wireless Capsule Endoscope. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 1254–1259. [Google Scholar]
- Wang, X.; Mao, G.; Ge, J.; Drack, M.; Bermúdez, G.S.C.; Wirthl, D.; Lling, R.; Kosub, T.; Bischoff, L.; Fassbender, J. Untethered and ultrafast soft-bodied robots. Commun. Mater. 2020, 1, 1–10. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, J.; McCoul, D.; Hao, Z.; Wang, S.; Wang, X.; Sun, L. Soft and fast hopping–running robot with speed of six times its body length per second. Soft Robot. 2019, 6, 713–721. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link # | |||
|---|---|---|---|
| 1 | 4 | 0° | 0° |
| 2 | 5.5 | 90° | 90° < < 110° |
| 3 | 5 | 75° | 75° < < 80° |
| 4 | 5 | −80° | −110° < < −80° |
| 5 | 11 | −95° | −105° < < −95° |
| 6 | 4.5 | −100° | −100° < < −75° |
| 7 | 11.5 | 80° | 85° < < 100° |
| 8 | 3 | 75° | 75° |
| Paper Sample | Length (L, mm) | Width (b, mm) | ||
|---|---|---|---|---|
| 1 | 105 148.5 | 102 | 148.5 | 0.13 |
| 2 | 105 74.25 | 102 | 74.25 | 0.13 |
| 3 | 52.5 74.25 | 49.5 | 74.25 | 0.13 |
| 4 | 52. 5 37.125 | 49.5 | 37.125 | 0.13 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.-S.; Jeon, Y.-U.; Lee, I.-S.; Jeong, J.-Y.; Hoang, M.C.; Hong, A.; Choi, E.; Park, J.-O.; Kim, C.-S. Wireless Walking Paper Robot Driven by Magnetic Polymer Actuator. Actuators 2020, 9, 109. https://doi.org/10.3390/act9040109
Lee H-S, Jeon Y-U, Lee I-S, Jeong J-Y, Hoang MC, Hong A, Choi E, Park J-O, Kim C-S. Wireless Walking Paper Robot Driven by Magnetic Polymer Actuator. Actuators. 2020; 9(4):109. https://doi.org/10.3390/act9040109
Chicago/Turabian StyleLee, Han-Sol, Yong-Uk Jeon, In-Seong Lee, Jin-Yong Jeong, Manh Cuong Hoang, Ayoung Hong, Eunpyo Choi, Jong-Oh Park, and Chang-Sei Kim. 2020. "Wireless Walking Paper Robot Driven by Magnetic Polymer Actuator" Actuators 9, no. 4: 109. https://doi.org/10.3390/act9040109
APA StyleLee, H. -S., Jeon, Y. -U., Lee, I. -S., Jeong, J. -Y., Hoang, M. C., Hong, A., Choi, E., Park, J. -O., & Kim, C. -S. (2020). Wireless Walking Paper Robot Driven by Magnetic Polymer Actuator. Actuators, 9(4), 109. https://doi.org/10.3390/act9040109