1. Introduction
Thanks to the high accuracy and reliability of Light Detection and Ranging (LiDAR) scanners, the use of such instruments has become the state-of-the-art of static and mobile mapping systems during the past decade. Given the possibility of using LiDAR sensors in both terrestrial and aerial surveys (Terrestrial Laser Scanning (TLS), Mobile Laser Scanning (MLS), Airborne Laser Scanning (ALS)), the number of applications exploiting such kind of technology is continuously increasing, including nowadays several fields such as civil and structural engineering [
1], forestry and environmental protection [
2], road engineering [
3], and assisted/autonomous driving. Many possible applications include, for instance, infrastructure documentation, construction of roads and highways [
4], production of digital terrain models [
5], inventory mapping [
6], design of streetscape [
7], extraction of traffic signs and buildings [
8], safety improvements [
9], and more recently, even the creation of three-dimensional (3D) models to support visual effects in the film industry [
10].
The quest for fast and detailed 3D spatial data acquisitions led to the development of LiDAR systems gathering information at a high data rate, up to millions of points per second in the current generation of LiDAR scanners. Furthermore, since due to occlusions some objects are not properly mapped by a single LiDAR mobile scanner, nowadays MLS systems are often provided with several LiDAR instruments acquiring data simultaneously but along different directions. On the one hand, the use of such multiple LiDAR systems ensures the collection of a spatially more complete dataset, on the other hand, the size of the collected point cloud quickly becomes huge.
In fact, there are several projects that use LiDAR systems for infrastructure documentation at large scales, such as transportation/power lines mapping and monitoring and inspection on large areas, possibly up to national scale. Moreover, some recent applications, such as autonomous/assisted driving, require the real time analysis of the acquired data in order to extract the information of interest. Such kind of requirement, in addition to the already mentioned need of properly dealing with huge amount of data, motivate the development of computationally efficient ways for effectively and timely processing the collected data.
In accordance with the above observations, this work proposes the use of Optimum Dataset (OptD) method in order to ease and speed up the process of off-road object (such as traffic signs, power lines, light poles, roadside trees) extraction from LiDAR data collected by MLS/ALS.
Fast and automatic detection of on-road and off-road objects from LIDAR datasets is very important for intelligent transportation infrastructure management as well as for driver assistance and for safety warning systems [
11,
12]. Several approaches have been recently proposed for the automatic detection of such objects. As LiDAR provides both geometric and radiometric information about the measured points (the so-called intensity depends on the physicochemical properties of the scanned surface, such as the roughness, color, and humidity [
13]); hence, both of them can be employed in the object detection process [
14]. A method combining unsupervised k-means, geometric and reflectivity characteristics to identify road points, traffic signs, and light poles has been developed in [
14]. Machine learning methods have been employed in [
8] to recognize on/off-road objects in urban environments. Laplacian smoothing, k-nearest neighbors graph, and Principal Component Analysis (PCA) have also been used to detect off-road objects [
15,
16].
All the methods mentioned above were applied to the complete collected LiDAR dataset; however, since the computational burden of the object detection algorithm is largely dependent on the dataset size, the use of such methods on the entire LiDAR point cloud can be computationally quite inefficient, in particular when dealing with huge datasets and quite stringent processing time requirements. In such cases, an automatic data optimization step can be conveniently applied in order to reduce the dataset size before applying the object detection algorithm. Such optimization phase shall clearly be a smart data reduction step: the rationale is that of retaining most of the points related to the objects of interest (e.g., traffic signs, light poles) while discarding most of the others (points in areas of low interest, such as on roads and pavements). In this way, the successive off-road object detection phase can be speeded up thanks to the dramatic data reduction, whereas the off-road object detection performance is almost invariant.
Several methods have already been proposed in the literature in order to reduce large LIDAR datasets, such as generation [
17,
18] algorithms based on the estimation of surface curvature radius [
19,
20], and octree-balanced density down-sampling [
21]. It is worth to notice that some of these data reduction methods are implemented in laser scanning processing software, e.g., Leica Cyclone, CloudCompare.
The goal of this work is to investigate the effectiveness of the OptD method, applied with a properly defined optimization criterion, in order to achieve a suitable data reduction. The obtained results are compared with those of the random down-sampling implemented in the CloudCompare software.
2. Methods
2.1. Review on Road Object Detection
The object detection problem refers to the computer capability of identifying and locating objects in a scene. Traditionally, most of the object detection methods were based on the use of machine learning methods, applied on pre-determined features, which were supposed to properly characterize the objects of interest. Nowadays, deep learning approaches have been shown to be more effective in a number of cases (e.g., Regional Convolutional Neural Network (RCNN)), Fast-RCNN, Faster-RCNN, “You Only Look Once” (YOLO). Differently from classical machine learning techniques, deep learning approaches aim at automatically determining the most suitable (typically high-level) features, which are usually learned along with the desired classifier. A more detailed review on the object detection history and recent developments is presented in [
22].
Despite that object detection methods were originally deployed as image analysis algorithms (e.g., they aimed to detect objects based to the visual information provided by cameras), the recent spread of 3D acquisition and visualization technologies encourages the development of object detection methods based on 3D information, e.g., on 3D point clouds. In particular, as long as road object detection is concerned, the role of 3D data processing and object detection is one of fundamental importance: indeed, several applications in this context (e.g., infrastructure mapping and documentation, autonomous/assisted driving) are based on the use of MLS [
23,
24].
On-road and off-road objects are usually divided in several sub-categories, as described in the following. On-road objects are typically classified into five categories: road surfaces, road markings, driving lines, road cracks, and road manholes. Differently, off-road objects, which are those of interest in this study, are usually classified into four categories [
23]:
Traffic Sign (TS)
Light Pole (LP)
Roadside Trees (RT)
Power Lines (PL)
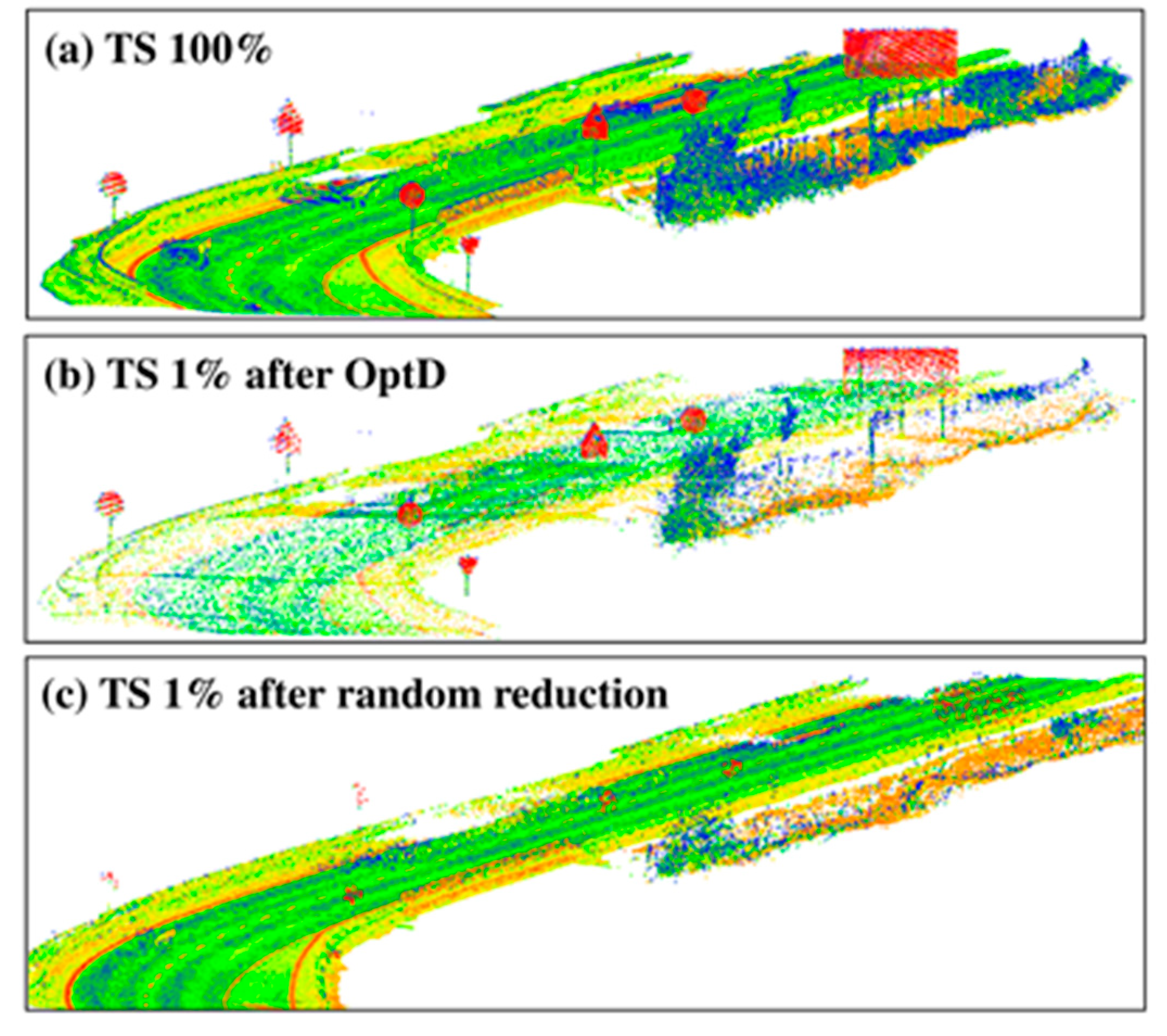
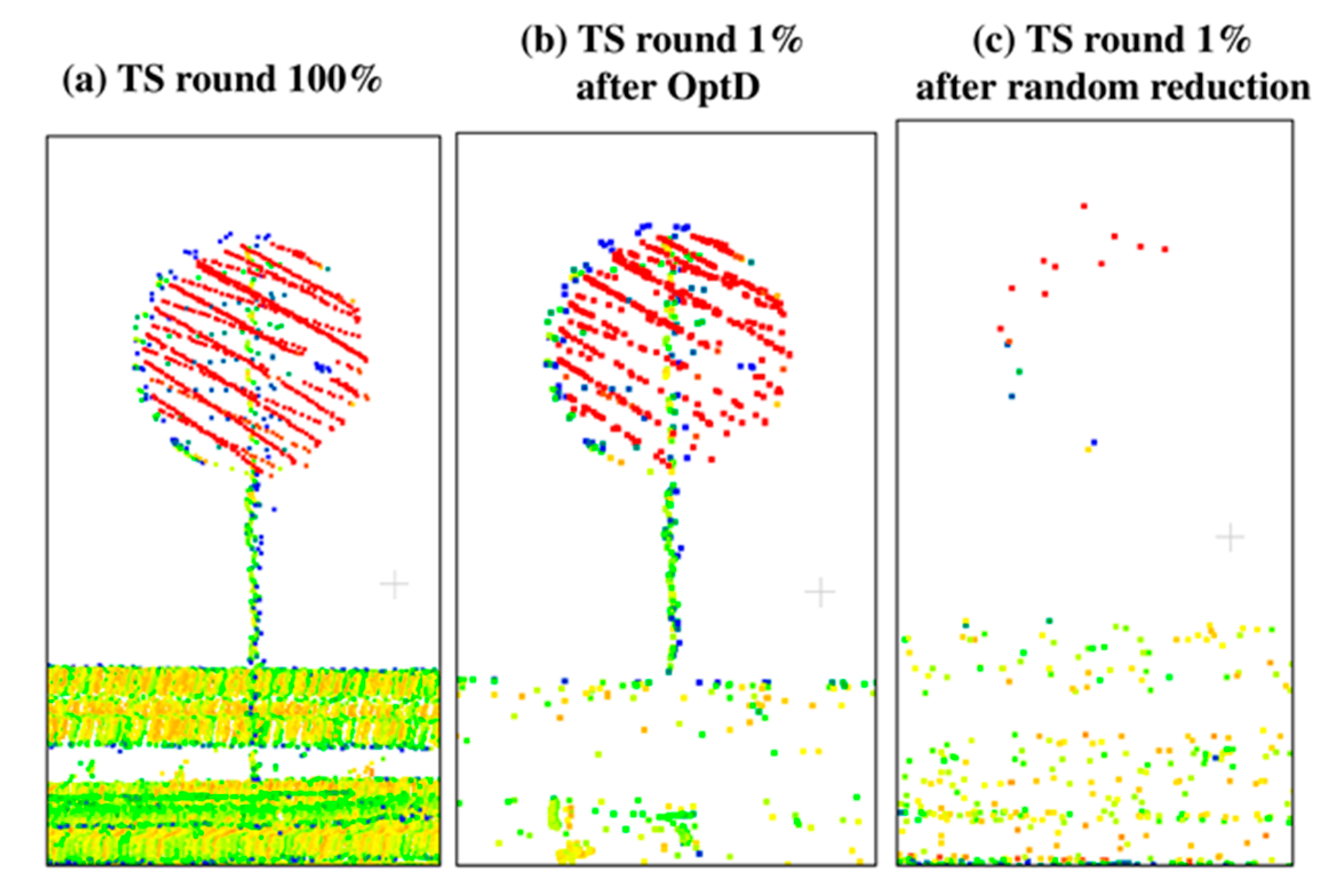
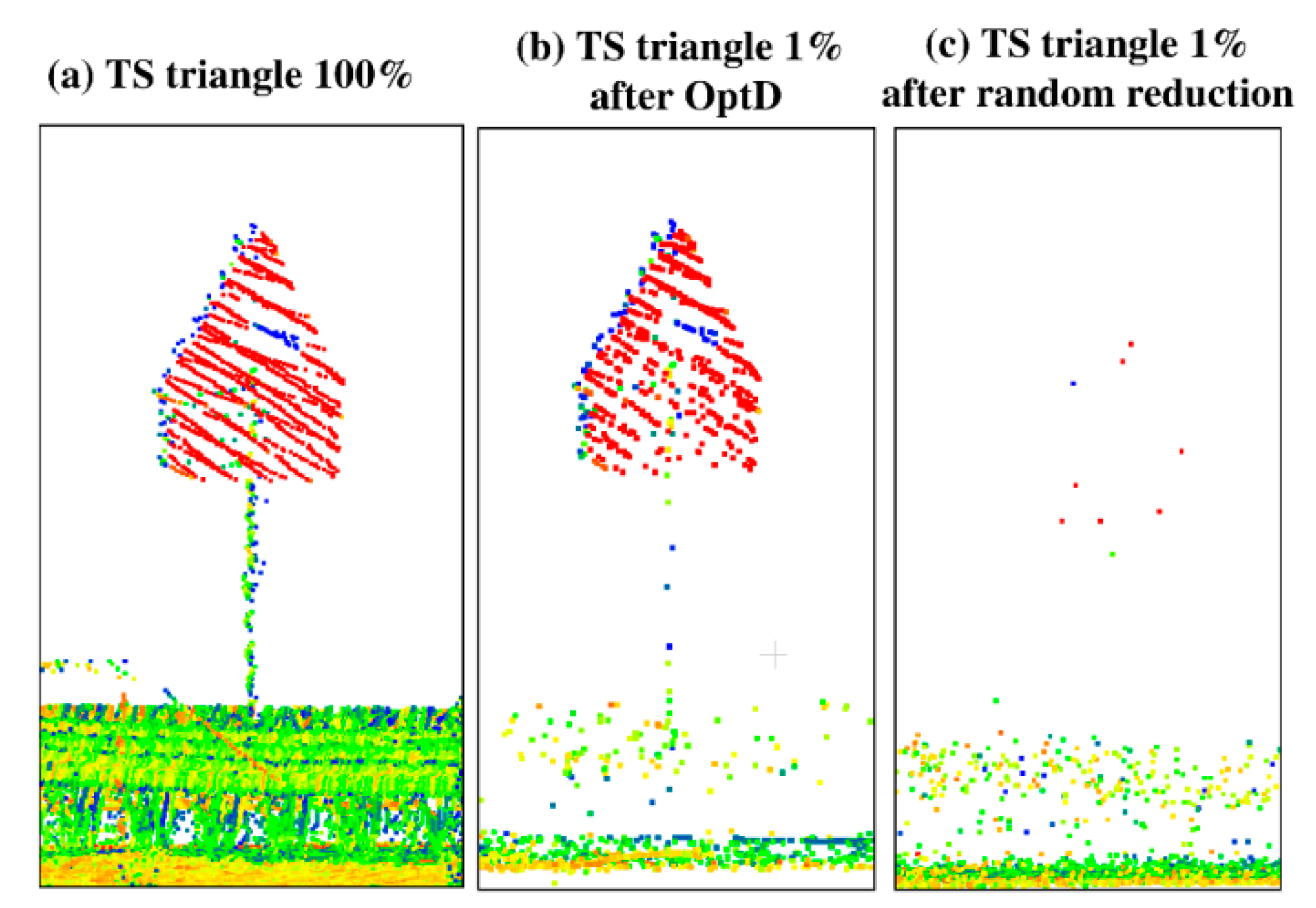
TS detection and recognition methods typically exploit both the geometric and radiometric characteristics of each traffic sign. The geometric shape of a traffic sign is usually highly regular (triangle, rectangle, or circle) and its position with respect to the road is quite standard: it is usually installed on the side of a road, at a specific height, approximately perpendicular to the ground, and parallel to other pole-like objects. Furthermore, its surface is planar, it is made with a metallic highly reflective material and covered with reflective paint. Since an imagery acquisition system is typically used in combination with the laser scanner, TS recognition is usually based on a three-step procedure: (1) traffic sign detection on the 3D dataset, (2) identification of the two-dimensional (2D) area in the camera imagery corresponding to the detected traffic sign, (3) use of image-based recognition methods on the determined 2D area [
25]. Such recognition methods are typically based on either machine learning or deep learning approaches, where the latter have recently shown a superior performance in many applications. Clearly, the performance of the TS recognition phase is strictly related to the accuracy of the previous detection phase [
23].
Two categories of light pole detection algorithms can be distinguished: knowledge-driven and data-driven methods. First, knowledge-driven methods can be classified in two sub-categories: matching-based and rule-based extraction. Matching-based extraction is based on the use of a pre-selected pole model that is matched with the extracted object. Since it is quite time consuming, it cannot be considered to be a viable method when dealing with large-volume data processing [
26]. Differently, rule-based extraction applies several rules, typically based on the geometric and spatial characteristics of light poles (e.g., location, radius, height), in order to remove any object different from a light-pole. Clearly, the number of rules to be applied, as well as the spatial data distribution, exert a significant impact on the efficiency of this kind of object extraction. In data-driven methods, a set of features is typically extracted from the dataset and used to characterize the objects of interest: as often done in machine learning, a massive and properly labelled training dataset is used to train a suitable light pole extractor [
24,
27].
Roadside tree detection from MLS point clouds is typically done by means of either rule-based [
28] or deep learning methods [
29,
30].
2.2. Optimum Dataset Method
This subsection shortly summarizes the main characteristics of the OptD method, mostly to properly highlight the changes applied here to the implementation previously used in other works. We refer the reader to [
31,
32,
33,
34] for a more detailed algorithmic description of the method.
The goal of the OptD method is to reduce the size of a point cloud while preserving as much as possible the information that is necessary for the correct implementation of the task of interest (e.g., the computation of a digital terrain model, a digital surface model, an inventory, or a thematic map). To achieve this aim, the selection of a proper optimization criterion is fundamental in order to guarantee the desired data reduction while retaining the information of interest.
The first stage of the OptD method begins with the question to the user to set a proper optimization criterion (f). Different optimization criteria can be used for reduction, for example, the average error of the dataset after the reduction exactly indicated number of points or percent of points after reduction. In this paper, the optimization criterion in the form of a percentage of points was used. Then the OptD method starts determining the area of interest, i.e., the minimum and maximum horizontal coordinates. Then, the determined rectangular area is partitioned into strips. The width of the strips L is automatically optimized in subsequent iterations of the OptD algorithm. The analysis of the points belonging to each of the strips includes the application of the selected cartographic generalization method [
35,
36], which has to be pre-selected by the user. The result of the generalization depends on the value of the tolerance range t, which is automatically updated in subsequent iterations of the algorithm until the condition expressed by the desired optimization criterion is met.
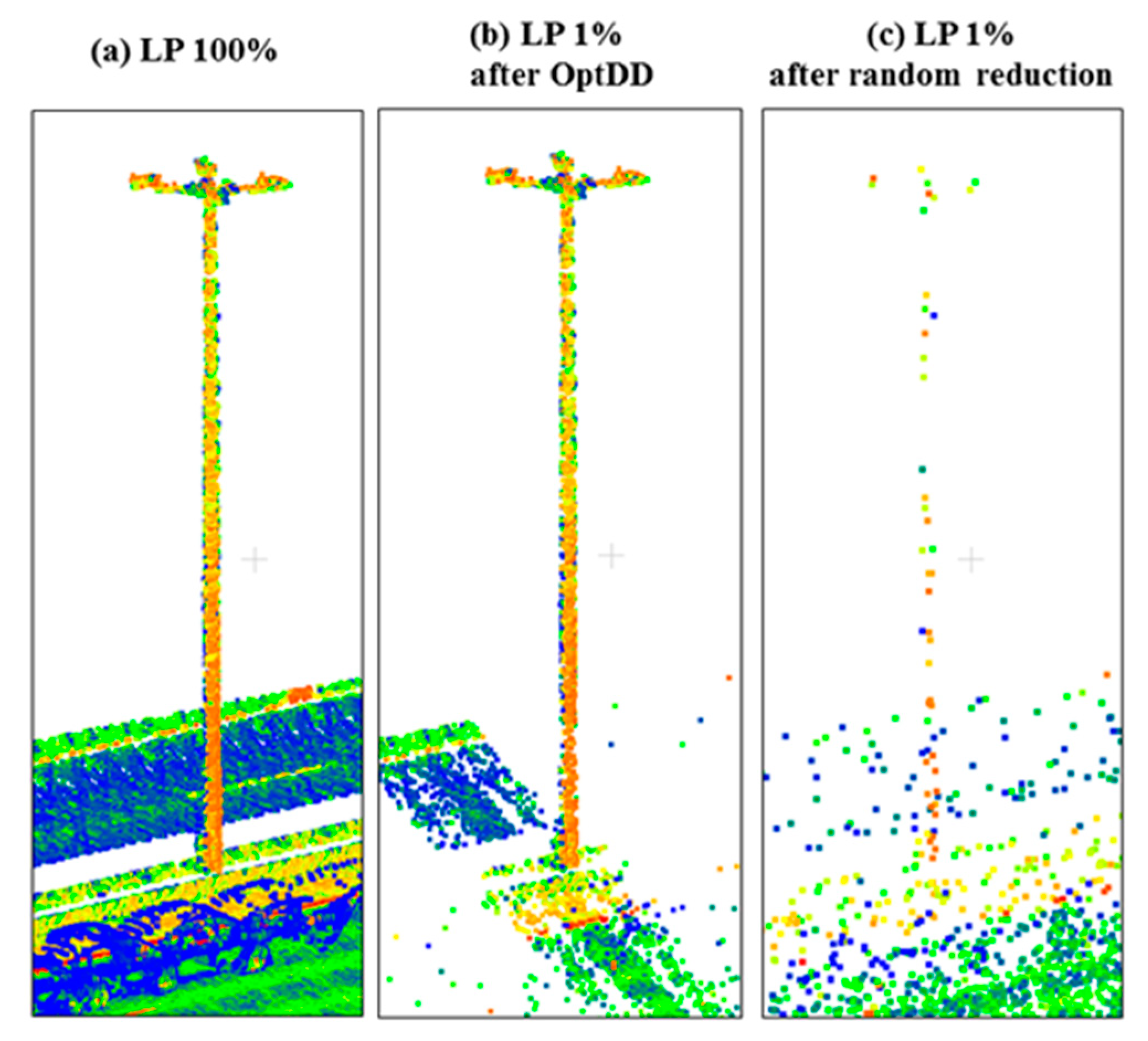
A change with respect to the OptD method used in previous works is applied here in the application of the generalization method. More specifically, given the importance in this work of high and relatively thin elements such as LPs, the generalization method is changed in order to retain a higher number of points in correspondence of high objects.
In practice, when several points are found with different vertical coordinates, but quite similar horizontal coordinates and intensity value, then the data reduction rate is reduced in such area by lowering the value of the tolerance range. Moreover, the hitherto operation is modified in order to avoid any change due to the OptD method to the nature of vertical objects (e.g., LP, the tube on which the TS is mounted). This preserve the possibility of correctly identifying the object even after applying the data reduction.
It is worth to notice that the only user-dependent actions in the application of the OptD method are entering the optimization criterion and the selection of the generalization method, whereas all the rest of the procedure is completely automatic (e.g., determining the strip width and the tolerance range).
Summarizing above, the OptD method for off-road objects extraction is carried out in the following stages:
Reading the LiDAR dataset.
Setting the optimization criterion (f%).
Determination of the processing area. In this way, a rectangular processing area is created, which is divided during the processing with OptD into strips (L).
Each strip is analyzed separately. In each strip there are measuring points that form a curve. The curve is generalized with the use of generalization methods, here: Douglas-Peucker method [
35]. The generation of lines created by points in the strips is always performed in the OXZ or OYZ plane. Thus, the changes are detected by analyzing the geometry. In this stage, the tolerance range value (t) is determined.
The end of OptD processing occurs when the generalization method is applied in all strips. The saved dataset meets the optimization criterion set in stage 2. The values L and t are changed during the iteration until the output dataset meets the optimization criterion.
The optimum LiDAR point cloud is saved. Then, the user can use the reduced and classified dataset for visualization.
2.3. Workflow
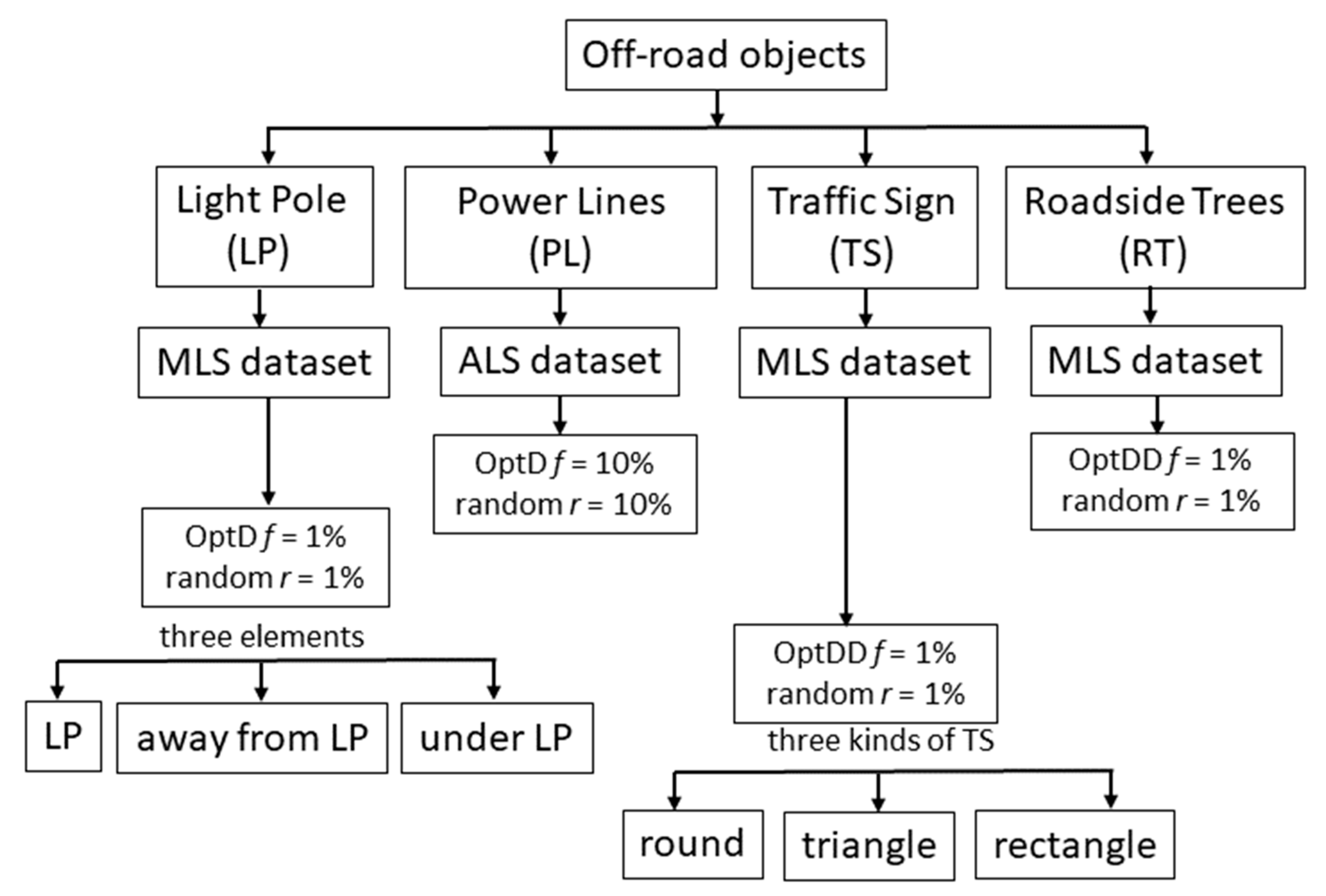
In this work the OptD method is used for the data reduction of datasets including off-road objects. In particular, the behavior of OptD is checked in four cases corresponding to the previously mentioned four categories of off-road objects. In all considered cases MLS datasets have been used in the tests done in this paper. It is worth to notice that, in the PL case, power lines were hardly noticeable in the MLS dataset. Therefore, ALS dataset has been considered in the results shown in this work.
In all the cases, the dataset has been processed with OptD and, for comparison, with the built-in data reduction function in CloudCompare (random cloud sub-sampling), by using the workflows summarized in the following.
Workflow with OptD:
Import dataset (—input *.txt).
Data reduction (—OptD.bat, —data reduction according to the selected optimization criterion f%).
Export dataset after reduction (—output *.txt).
Workflow with CloudCompare:
Import dataset (open ASCII file *.txt).
Data reduction (cloud sub-sampling, random method with criterion r%).
Export dataset after reduction (save as ASCII cloud *.txt).
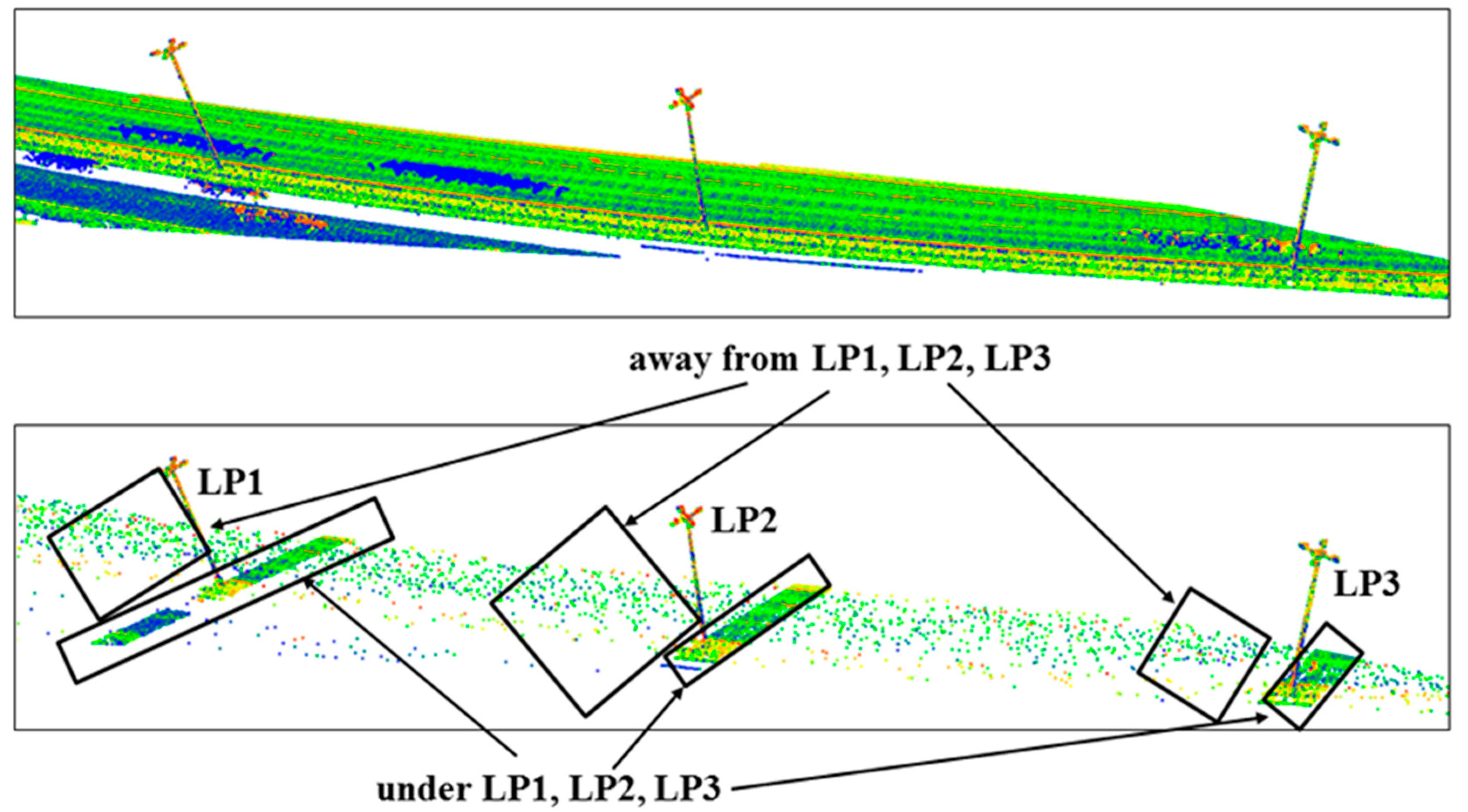
The scheme in
Figure 1 shows the different case studies of off-road objects considered in this work.
Given the different scanning resolution of the MLS and ALS datasets, and given the quite small number of PL points in any of the considered datasets (both MLS and ALS), a different reduction rate has been applied: MLS datasets, used in the LP and TS tests, have been reduced at 1% of the original size, whereas 10% of reduction rate (defined as the ratio between the reduced and the original size) has been used in the case of ALS.
The comparison with the CloudCompare results has been done by considering the same reduction rates used for the OptD method.
2.4. LiDAR Datasets
2.4.1. MLS Dataset
The MLS data acquisition was carried out by GEOPARTNER (
www.geopartner.gda.pl) in 2017, which used the Topcon IP-S3 mobile mapping system. Despite being quite small, light, and easy to handle, Topcon IP-S3 provides high density and precision point clouds combined with high resolution panoramas. Precise positioning and attitude in a dynamic environment are done thanks to the combination of information from IMU (Inertial Measurement Unit), GNSS (Global Navigation Satellite System) receiver (GPS and GLObal NAvigation Satellite System (GLONASS)), and a vehicle odometer. Furthermore, it has a six-lens digital camera system that provides 360-degree high resolution spherical images. Concerning the laser scanner unit, the scanning rate is 700,000 pulses per second. There are 32 internal lasers covering the full 360 degrees around the system, each from a slightly different viewing angle, which minimizes gaps in the point cloud. All post processing trajectories and georeferencing scans and images are performed in Mobile Master Office software.
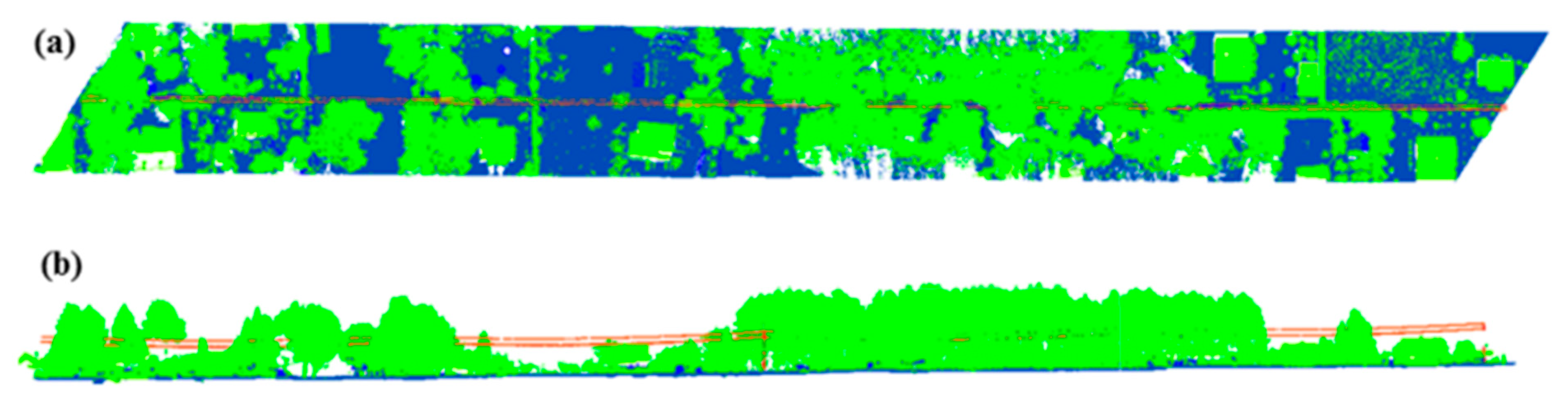
The MLS dataset considered in this paper is shown in
Figure 2. The presented point cloud is not classified, and the colors of the points result from the intensity.
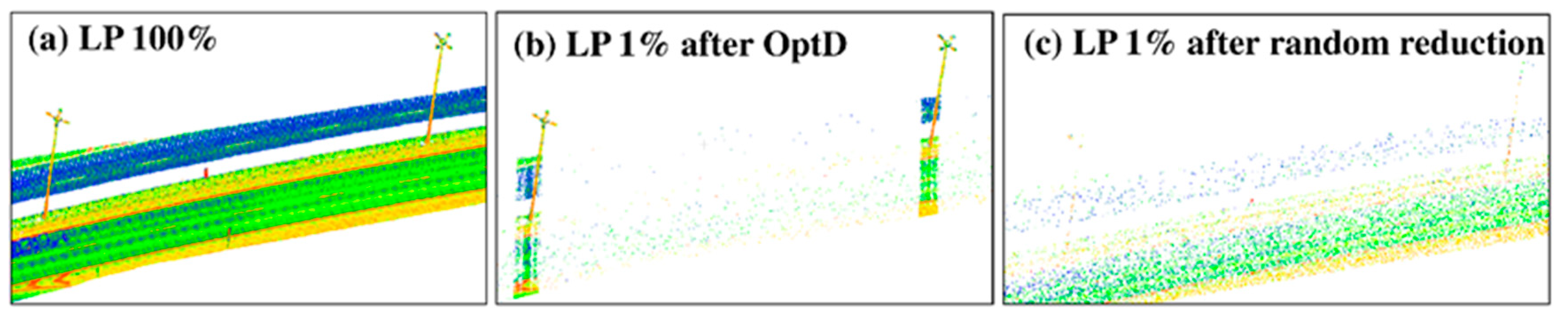
The MLS dataset has been processed by means of OptD and random reduction in CloudCompare (CC), leading to the results shown in
Table 1.
According to the results shown in
Table 1, it can be stated that, differently from the random reduction case, the OptD algorithm maintained the Z
min and Z
max values (Z—height of scanned points), whereas the obtained value of the average point distance is different but the difference is not relevant with respect to the average distance.
2.4.2. ALS Dataset
The ALS dataset has been provided by Vimap Olsztyn: the survey has been conducted on 6 July 2017, by means of a RIEGEL VUX1-UAV laser scanner (RIEGL Laser Measurement Systems, Austria), with a helicopter flying at an altitude of approximately 100 m. The fragment of point cloud used in this work contains 2,332,746 points and is shown in
Figure 3. The presented ALS point cloud is classified.
As already mentioned, in this case, both OptD and random sub-sampling in CloudCompare were applied in order to reduce the point cloud size at 10% of its original size. The obtained results are shown in
Table 2.
Similar to the MLS case, only the OptD method maintained the original values of Zmin and Zmax, whereas the average point distance obtained after applying the two data reduction methods is quite similar.
4. Discussion
Nowadays, LiDAR technology is widely used for collecting data related to transport infrastructures, roads, and on-road/off-road objects. Since several applications require an automatic workflow to extract information of interest from the LiDAR, recent studies considered different approaches in order to automatically detect objects of interest from such datasets. However, the increasing acquisition performance of LiDAR instruments is leading to the availability of surveying systems capable of collecting a huge amount of 3D points in a short time, and consequently, to the necessity of developing computationally efficient strategies to process such very large dataset.
Since the direct application of object detection methods on large raw LiDAR datasets can be computationally inefficient, this paper considered the use of the OptD method as a pre-processing step in order to tremendously reduce the dataset size, while keeping most of the geometric information of interest for the considered application. The rationale is that, since the OptD method is computationally very efficient, if it properly preserves the information about the objects of interest, then it can be used as a pre-processing step in order to significantly speed up the successive object detection phase.
To be more specific, this work focused on the application of OptD in the off-road object detection case. The OptD method was applied on MLS and ALS datasets assessing the suitability of its data reduction for what concerns the detection of three classes of off-road objects: light poles, traffic signs, and power lines. According to the results obtained in the experiments shown in this paper, and summarized in
Table 9,
Table 10 and
Table 11, the OptD can be a suitable method to dramatically reduce the LiDAR dataset size while preserving most of the information needed for the identification of the considered off-road objects, hence enabling a significant speed up of the object detection phase.
As a side effect, since the applied data reduction typically keeps much more points related to the objects of interest than of the others, it may also ease their detection.
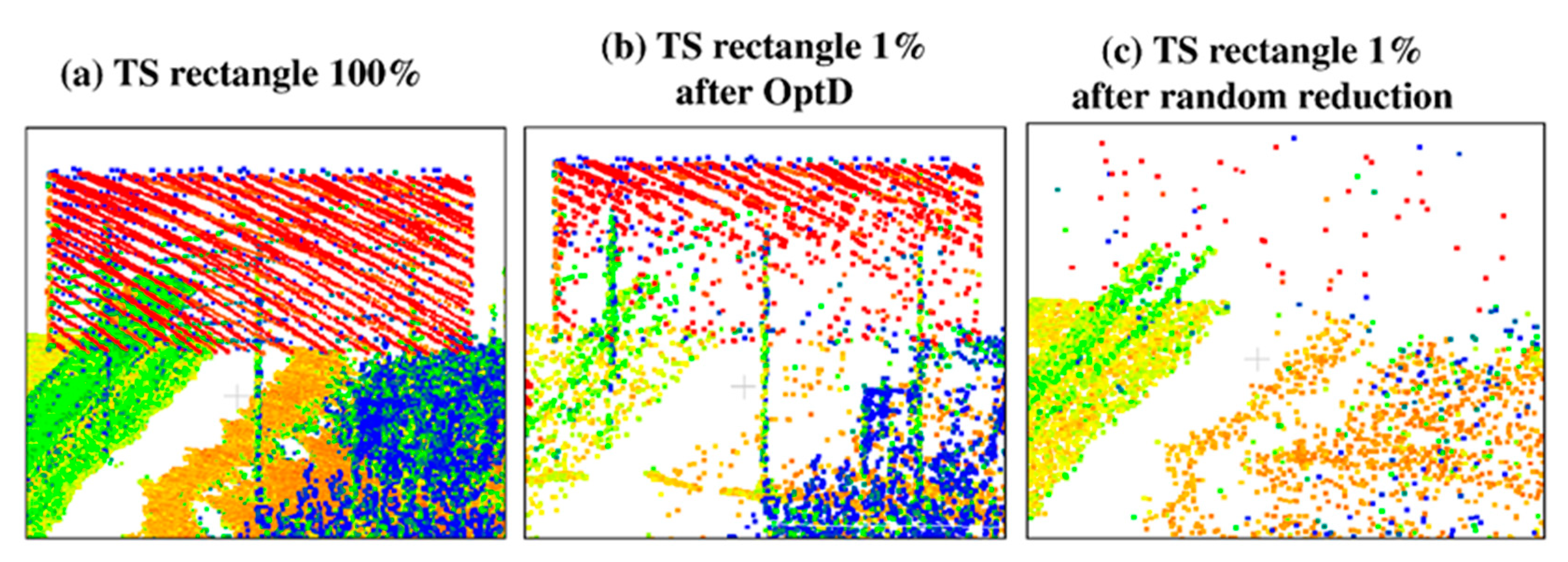
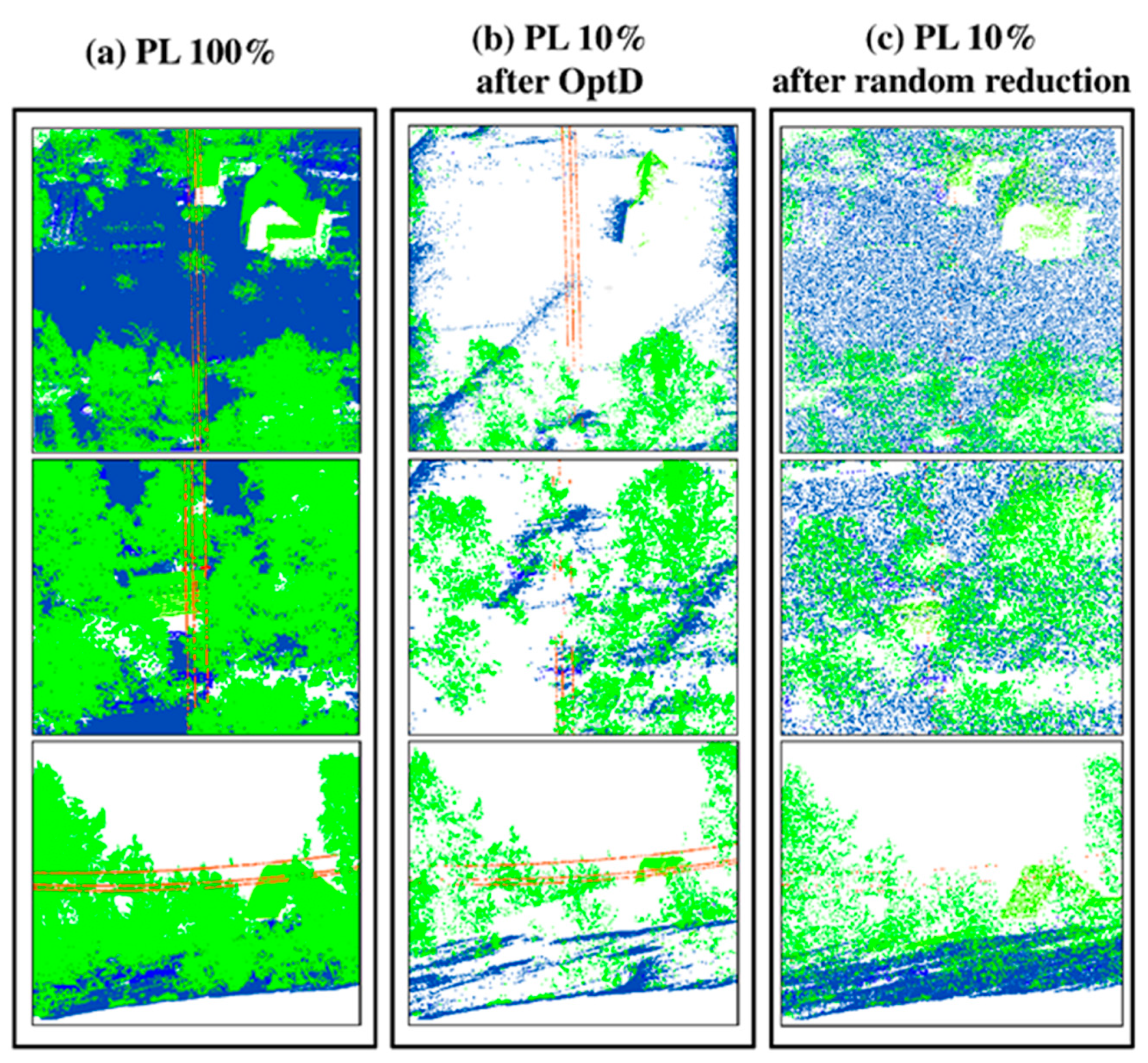
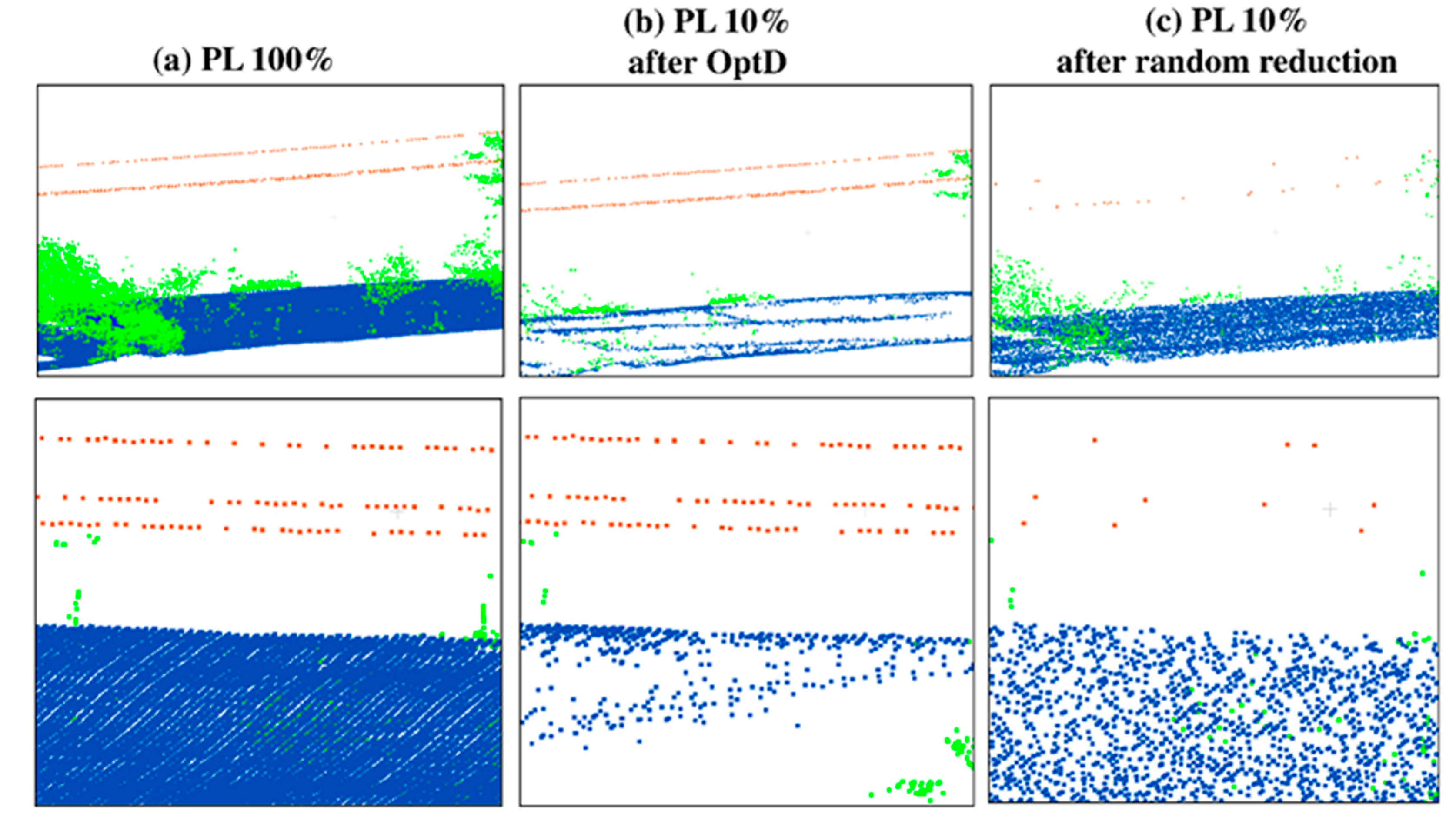
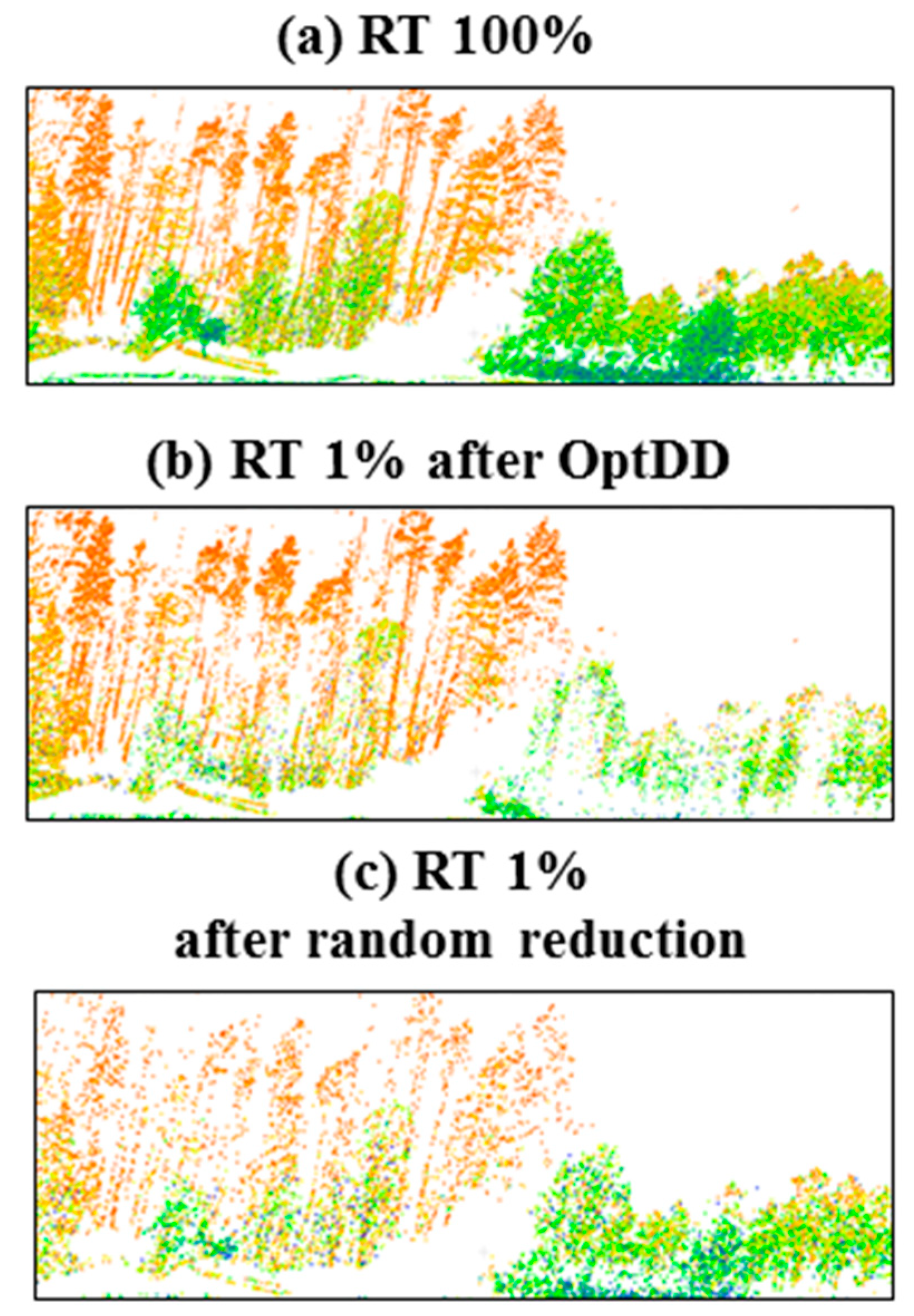
In fact, the proposed method might also be considered a pre-processing step in a much wider range of cases. However, in such case, the proposed data reduction method might cause some issues when dealing with the detection/recognition of objects characterized by very regular surfaces (e.g., planar surfaces), which are those more affected by the OptD data reduction. The obtained results showed that a naïve data reduction based on random sub-sampling the original point cloud typically cannot be used to significantly reduce the dataset size: in this case, the approximately uniform data down-sampling typically causes the loss of most of the information about the off-road objects. Differently, the OptD method applies a non-uniform data reduction, tailored on the geometric characteristics of the dataset and on the specific optimization strategies specified in its implementation (check
Section 2.2 for the changes applied here to the previously developed OptD method). The results on the examples reported in
Section 3 confirm that the OptD method properly preserves most of the information of interest for off-road object detection in all the considered cases.
Table 9,
Table 10, and
Table 11 summarize the obtained results for what concerns the data reduction in the three considered off-road object classes.

 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}