Insights into the Short-Term Tidal Variability of Multibeam Backscatter from Field Experiments on Different Seafloor Types

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
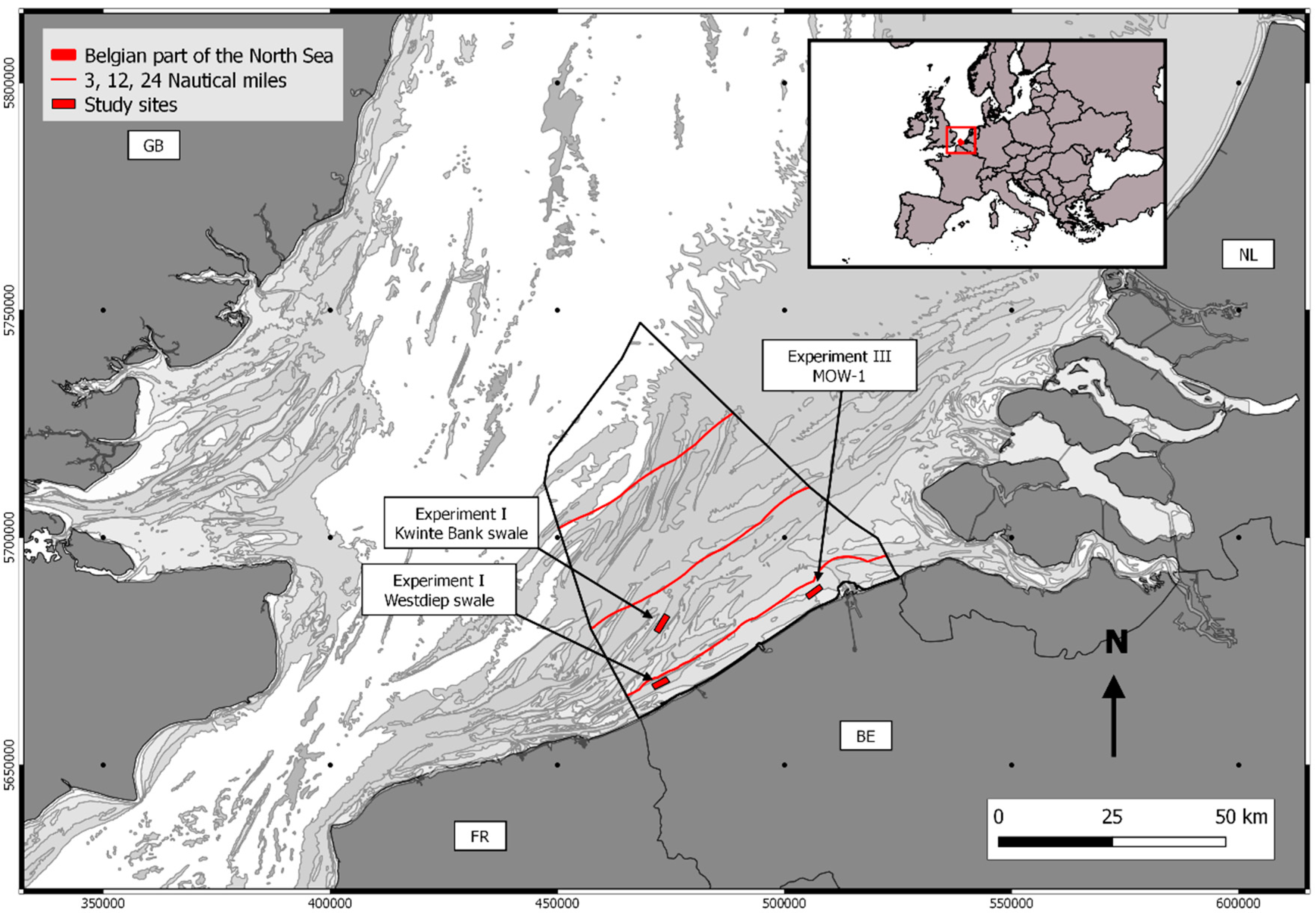
2.1. Description of MBES and Survey Areas
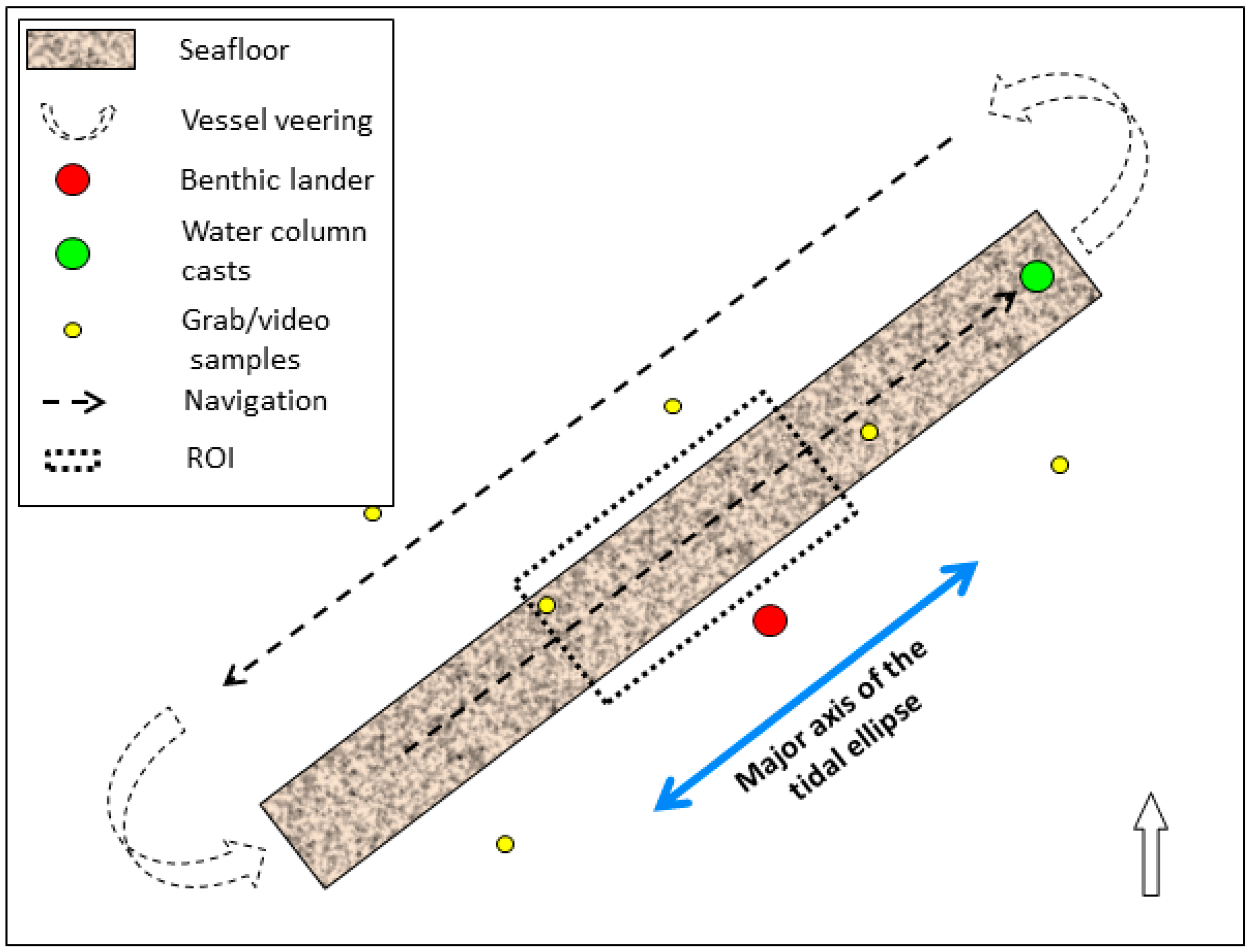
2.2. Survey Methodology and Data Processing
2.2.1. Experiment 1—Kwinte Swale Area
2.2.2. Experiment 2—Westdiep Swale Area
2.2.3. Experiment 3—Zeebrugge, MOW 1 Pile Area
2.3. MBES Processing
2.4. Transmission Losses
3. Results
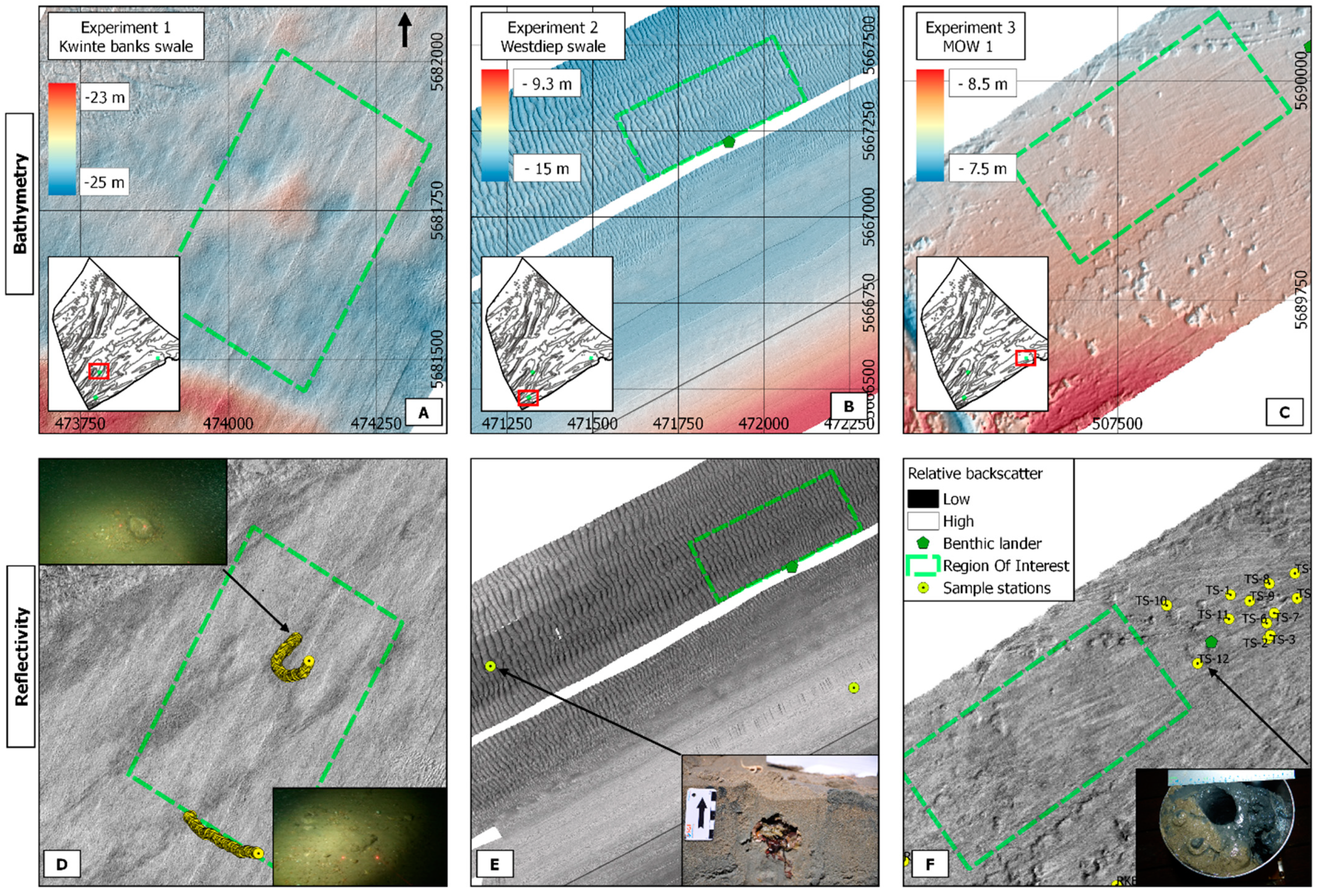
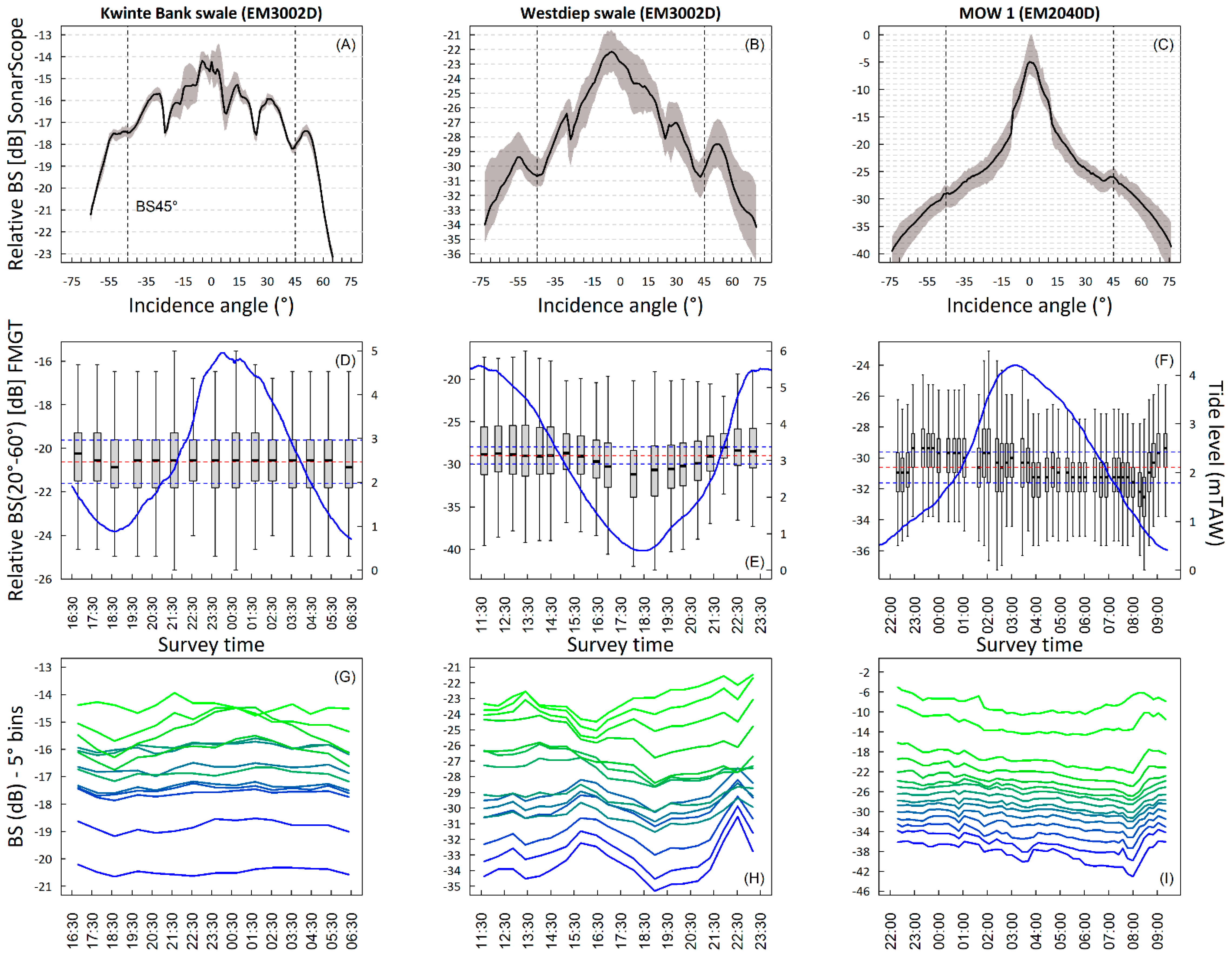
3.1. Results Display
3.1.1. Offshore Gravelly Area—Kwinte Swale
3.1.2. Nearshore Sandy Area—Westdiep Swale
3.1.3. Nearshore Muddy Area—Zeebrugge, MOW 1
3.2. Transmission Losses
4. Discussion
4.1. Short-Term Backscatter Tidal Dependence
4.1.1. Experiment 1—Offshore Gravel Area
4.1.2. Experiment 2—Nearshore Sandy Area
4.1.3. Experiment 3—Nearshore Muddy Area
4.2. Recommendations on Future Experiments on MBES-BS Variability
4.3. Implications for Repeated Backscatter Mapping Using MBES
5. Conclusions and Future Directions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Data Availability
References
- Halpern, B.S.; Walbridge, S.; Selkoe, K.A.; Kappel, C.V.; Micheli, F.; D’Agrosa, C.; Bruno, J.F.; Casey, K.S.; Ebert, C.; Fox, H.E.; et al. A Global Map of Human Impact on Marine Ecosystems. Science 2008, 319, 948–952. [Google Scholar] [CrossRef] [PubMed]
- Douvere, F.; Maes, F.; Vanhulle, A.; Schrijvers, J. The role of marine spatial planning in sea use management: The Belgian case. Mar. Policy 2007, 31, 182–191. [Google Scholar] [CrossRef] [Green Version]
- McArthur, M.A.; Brooke, B.P.; Przeslawski, R.; Ryan, D.A.; Lucieer, V.L.; Nichol, S.; McCallum, A.W.; Mellin, C.; Cresswell, I.D.; Radke, L.C. On the use of abiotic surrogates to describe marine benthic biodiversity. Estuar. Coast. Shelf Sci. 2010, 88, 21–32. [Google Scholar] [CrossRef]
- Rice, J.; Arvanitidis, C.; Borja, A.; Frid, C.; Hiddink, J.G.; Krause, J.; Lorance, P.; Ragnarsson, S.Á.; Sköld, M.; Trabucco, B.; et al. Indicators for Sea-floor Integrity under the European Marine Strategy Framework Directive. Ecol. Indic. 2012, 12, 174–184. [Google Scholar] [CrossRef]
- Belgian State. Determination of Good Environmental Status & establishment of Environmental Targets for the Belgian marine waters, Marine Strategy Framework Directive—Art 9 & 10. Available online: https://www.health.belgium.be/sites/default/files/uploads/fields/fpshealth_theme_file/19087665/Goede%20milieutoestand-MSFD%20EN.pdf (accessed on 1 November 2018).
- De Moustier, C.; Matsumoto, H. Seafloor acoustic remote sensing with multibeam echo-sounders and bathymetric sidescan sonar systems. Mar. Geophys. Res. 1993, 15, 27–42. [Google Scholar] [CrossRef] [Green Version]
- Brown, C.J.; Blondel, P. Developments in the application of multibeam sonar backscatter for seafloor habitat mapping. Appl. Acoust. 2009, 70, 1242–1247. [Google Scholar] [CrossRef]
- Urick, R.J. Principles of Underwater Sound for Engineers, 3rd ed.; Tata McGraw-Hill Education: New York, NY, USA, 1967. [Google Scholar]
- Hughes Clarke, J.E.; Mayer, L.A.; Wells, D.E. Shallow-water imaging multibeam sonars: A new tool for investigating seafloor processes in the coastal zone and on the continental shelf. Mar. Geophys. Res. 1996, 18, 607–629. [Google Scholar] [CrossRef]
- Ferrini, V.L.; Flood, R.D. The effects of fine-scale surface roughness and grain size on 300 kHz multibeam backscatter intensity in sandy marine sedimentary environments. Mar. Geol. 2006, 228, 153–172. [Google Scholar] [CrossRef]
- Lamarche, G.; Lurton, X. Recommendations for improved and coherent acquisition and processing of backscatter data from seafloor-mapping sonars. Mar. Geophys. Res. 2018, 39, 5–22. [Google Scholar] [CrossRef]
- Lurton, X. An Introduction to Underwater Acoustics: Principles and Applications; Springer: Berlin/Heidelberg, Germany, 2002; p. 680. ISBN 978-3-540-78480-7. [Google Scholar]
- Strong, J.A.; Elliott, M. The value of remote sensing techniques in supporting effective extrapolation across multiple marine spatial scales. Mar. Pollut. Bull. 2017, 116, 405–419. [Google Scholar] [CrossRef]
- Brown, C.J.; Sameoto, J.A.; Smith, S.J. Multiple methods, maps, and management applications: Purpose made seafloor maps in support of ocean management. J. Sea Res. 2012, 72, 1–13. [Google Scholar] [CrossRef]
- Buhl-Mortensen, L.; Buhl-Mortensen, P.; Dolan, M.F.J.; Holte, B. The MAREANO programme—A full coverage mapping of the Norwegian off-shore benthic environment and fauna. Mar. Biol. Res. 2015, 11, 4–17. [Google Scholar] [CrossRef]
- Holler, P.; Markert, E.; Bartholomä, A.; Capperucci, R.; Hass, H.C.; Kröncke, I.; Mielck, F.; Reimers, H.C. Tools to evaluate seafloor integrity: Comparison of multi-device acoustic seafloor classifications for benthic macrofauna-driven patterns in the German Bight, Southern North Sea. Geo-Mar. Lett. 2017, 37, 93–109. [Google Scholar] [CrossRef]
- Madricardo, F.; Foglini, F.; Kruss, A.; Ferrarin, C.; Pizzeghello, N.M.; Murri, C.; Rossi, M.; Bajo, M.; Bellafiore, D.; Campiani, E.; et al. High resolution multibeam and hydrodynamic datasets of tidal channels and inlets of the Venice Lagoon. Sci. Data 2017, 4, 170121. [Google Scholar] [CrossRef] [PubMed]
- Jackson, D.R.; Baird, A.M.; Crisp, J.J.; Thomson, P.A.G. High-frequency bottom backscatter measurements in shallow water. J. Acoust. Soc. Am. 1986, 80, 1188–1199. [Google Scholar] [CrossRef]
- Hughes Clarke, J.E.; Danforth, B.W.; Valentine, P. Areal Seabed Classification using Backscatter Angular Response at 95 kHz. In Proceedings of the Conference of High Frequency Acoustics in Shallow Water, NATO SACLANT Undersea Research Centre, Lerici, Italy, 30 June–4 July 1997. [Google Scholar]
- Che Hasan, R.; Ierodiaconou, D.; Laurenson, L.; Schimel, A. Integrating Multibeam Backscatter Angular Response, Mosaic and Bathymetry Data for Benthic Habitat Mapping. PLoS ONE 2014, 9, e97339. [Google Scholar] [CrossRef] [PubMed]
- Eleftherakis, D.; Berger, L.; Le Bouffant, N.; Pacault, A.; Augustin, J.-M.; Lurton, X. Backscatter calibration of high-frequency multibeam echosounder using a reference single-beam system, on natural seafloor. Mar. Geophys. Res. 2018, 39, 55–73. [Google Scholar] [CrossRef]
- Fonseca, L.; Mayer, L. Remote estimation of surficial seafloor properties through the application Angular Range Analysis to multibeam sonar data. Mar. Geophys. Res. 2007, 28, 119–126. [Google Scholar] [CrossRef]
- Galparsoro, I.; Borja, Á.; Bald, J.; Liria, P.; Chust, G. Predicting suitable habitat for the European lobster (Homarus gammarus), on the Basque continental shelf (Bay of Biscay), using Ecological-Niche Factor Analysis. Ecol. Model. 2009, 220, 556–567. [Google Scholar] [CrossRef]
- Wedding, L.; Lepczyk, C.; Pittman, S.; Friedlander, A.; Jorgensen, S. Quantifying seascape structure: Extending terrestrial spatial pattern metrics to the marine realm. Mar. Ecol. Prog. Ser. 2011, 427, 219–232. [Google Scholar] [CrossRef]
- Ierodiaconou, D.; Schimel, A.C.G.; Kennedy, D.; Monk, J.; Gaylard, G.; Young, M.; Diesing, M.; Rattray, A. Combining pixel and object based image analysis of ultra-high resolution multibeam bathymetry and backscatter for habitat mapping in shallow marine waters. Mar. Geophys. Res. 2018, 39, 271–288. [Google Scholar] [CrossRef]
- Lamarche, G.; Lurton, X.; Verdier, A.-L.; Augustin, J.-M. Quantitative characterisation of seafloor substrate and bedforms using advanced processing of multibeam backscatter—Application to Cook Strait, New Zealand. Cont. Shelf Res. 2011, 31, S93–S109. [Google Scholar] [CrossRef]
- Ladroit, Y.; Lamarche, G.; Pallentin, A. Seafloor multibeam backscatter calibration experiment: Comparing 45°-tilted 38-kHz split-beam echosounder and 30-kHz multibeam data. Mar. Geophys. Res. 2018, 39, 41–53. [Google Scholar] [CrossRef]
- Fezzani, R.; Berger, L. Analysis of calibrated seafloor backscatter for habitat classification methodology and case study of 158 spots in the Bay of Biscay and Celtic Sea. Mar. Geophys. Res. 2018, 39, 169–181. [Google Scholar] [CrossRef]
- Weber, T.C.; Rice, G.; Smith, M. Toward a standard line for use in multibeam echo sounder calibration. Mar. Geophys. Res. 2018, 39, 75–87. [Google Scholar] [CrossRef]
- Roche, M.; Degrendele, K.; Vrignaud, C.; Loyer, S.; Le Bas, T.; Augustin, J.-M.; Lurton, X. Control of the repeatability of high frequency multibeam echosounder backscatter by using natural reference areas. Mar. Geophys. Res. 2018, 39, 89–104. [Google Scholar] [CrossRef]
- Roche, M.; Degrendele, K.; Vandenreyken, H.; Schotte, P. Multi Time and Space scale Monitoring of the Sand Extraction and Its Impact on the Seabed by Coupling EMS Data and MBES Measurements. 33. Belgian Marine Sand: A Scarce Resource? Belgian FPS Economy—Study day 9. June 2017. Available online: http://economie.fgov.be/fr/binaries/Articles-study-day-2017_tcm326-283850.pdf (accessed on 1 November 2018).
- Lucieer, V.; Roche, M.; Degrendele, K.; Malik, M.; Dolan, M.; Lamarche, G. User expectations for multibeam echo sounders backscatter strength data-looking back into the future. Mar. Geophys. Res. 2018, 39, 23–40. [Google Scholar] [CrossRef]
- Roche, M.; Baeye, M.; Bisschop, J.D.; Degrendele, K.; Papili, S.; Lopera, O.; Lancker, V.V. Backscatter stability and influence of water column conditions: Estimation by multibeam echosounder and repeated oceanographic measurements, Belgian part of the North Sea. Inst. Acoust. 2015, 37, 8. [Google Scholar]
- Singh, A. Review Article Digital change detection techniques using remotely-sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar] [CrossRef] [Green Version]
- Floricioiu, D.; Rott, H. Seasonal and short-term variability of multifrequency, polarimetric radar backscatter of Alpine terrain from SIR-C/X-SAR and AIRSAR data. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2634–2648. [Google Scholar] [CrossRef]
- Boehme, H.; Chotiros, N.P.; Rolleigh, L.D.; Pitt, S.P.; Garcia, A.L.; Goldsberry, T.G.; Lamb, R.A. Acoustic backscattering at low grazing angles from the ocean bottom. I. Bottom backscattering strength. J. Acoust. Soc. Am. 1984, 75, S30. [Google Scholar] [CrossRef]
- Briggs, K.B.; Williams, K.L.; Richardson, M.D.; Jackson, D.R. Effects of Changing Roughness on Acoustic Scattering: (1) Natural Changes. Proc. Inst. Acoust. 2001, 23, 375–382. [Google Scholar]
- Richardson, M.D.; Briggs, K.B.; Williams, K.L.; Lyons, A.P.; Jackson, D.R. Effects of Changing Roughness on Acoustic Scattering: (2) Anthropogenic Changes. 2001. Available online: http://www.apl.washington.edu/programs/SAX99/IOSpapers/Richardson.pdf (accessed on 4 December 2018).
- Lurton, X.; Eleftherakis, D.; Augustin, J.-M. Analysis of seafloor backscatter strength dependence on the survey azimuth using multibeam echosounder data. Mar. Geophys. Res. 2018, 39, 183–203. [Google Scholar] [CrossRef]
- Francois, R.E.; Garrison, G.R. Sound absorption based on ocean measurements: Part I: Pure water and magnesium sulfate contributions. J. Acoust. Soc. Am. 1982, 72, 896–907. [Google Scholar] [CrossRef]
- Francois, R.E.; Garrison, G.R. Sound absorption based on ocean measurements. Part II: Boric acid contribution and equation for total absorption. J. Acoust. Soc. Am. 1982, 72, 1879–1890. [Google Scholar] [CrossRef]
- De Campos Carvalho, R.; de Oliveira Junior, A.M.; Clarke, J.E.H. Proper environmental reduction for attenuation in multi-sector sonars. In Proceedings of the 2013 IEEE/OES Acoustics in Underwater Geosciences Symposium, Rio de Janeiro, Brazil, 24–26 July 2013; pp. 1–6. [Google Scholar]
- Richards, S.D.; Heathershaw, A.D.; Thorne, P.D. The effect of suspended particulate matter on sound attenuation in seawater. J. Acoust. Soc. Am. 1996, 100, 1447–1450. [Google Scholar] [CrossRef]
- Holliday, D.V.; Pieper, R.E. Volume scattering strengths and zooplankton distributions at acoustic frequencies between 0.5 and 3 MHz. J. Acoust. Soc. Am. 1980, 67, 135–146. [Google Scholar] [CrossRef]
- Gorska, N.; Kowalska-Duda, E.; Pniewski, F.; Latała, A. On diel variability of marine sediment backscattering properties caused by microphytobenthos photosynthesis: Impact of environmental factors. J. Mar. Syst. 2018, 182, 1–11. [Google Scholar] [CrossRef]
- Bellec, V.K.; Lancker, V.V.; Degrendele, K.; Roche, M. Geo-environmental Characterization of the Kwinte Bank. J. Coast. Res. 2010, 63–76. [Google Scholar]
- Van Lancker, V. Sediment and Morphodynamics of a Siliciclastic near Coastal Area, in Relation to Hydrodynamical and Meteorological Conditions: Belgian Continental Shelf. Ph.D. Thesis, Gent University, Gent, Belgium, 24 June 1999. [Google Scholar]
- Fettweis, M.; Baeye, M. Seasonal variation in concentration, size, and settling velocity of muddy marine flocs in the benthic boundary layer: Seasonality of SPM concentration. J. Geophys. Res. Oceans 2015, 120, 5648–5667. [Google Scholar] [CrossRef]
- Baeye, M.; Fettweis, M.; Legrand, S.; Dupont, Y.; Van Lancker, V. Mine burial in the seabed of high-turbidity area—Findings of a first experiment. Cont. Shelf Res. 2012, 43, 107–119. [Google Scholar] [CrossRef]
- Lanckneus, J.; Van Lancker, V.; Moerkerke, G.; Van Den Eynde, D.; Fettweis, M.; De Batist, M.; Jacobs, P. Investigation of the Natural Sand Transport on the Belgian Continental Shelf (BUDGET); Federal Office for Scientific, Technical and Cultural Affairs (OSTC): Brussel, Belgium, 2001; pp. 104–187. Available online: http://www.vliz.be/imisdocs/publications/ocrd/262275.pdf (accessed on 1 November 2018).
- Van Lancker, V.; De Batist, M.; Fettweis, M.; Pichot, G.; Monbaliu, J. Management, Research and Budgeting of Aggregates in Shelf Seas Related to End-Users (MAREBASSE); Belgian Scientific Policy Office: Brussel, Belgium, 2007; p. 66. Available online: http://www.vliz.be/imisdocs/publications/139287.pdf (accessed on 5 October 2018).
- Davies, C.E.; Moss, D.; Hill, M.O. EUNIS Habitat Classification Revised. European Environment Agency European Topic Centre on Nature Protection and Biodiversity, October 2004. Available online: https://www.eea.europa.eu/data-and-maps/data/eunis-habitat-classification (accessed on 1 November 2018).
- Kongsberg Maritime. Seafloor Information System Reference Manual—429004/A, 5th ed.; Kongsberg Maritime: Kongsberg, Norway, April 2018; Available online: https://www.km.kongsberg.com/ks/web/nokbg0397.nsf/AllWeb/A269870356C3A572C1256E19004ECFA9/$file/164878ac_SIS_Product_specification.pdf (accessed on 1 November 2018).
- De Bisschop, J. Influence of Water Column Properties on Multibeam Backscatter. Master’s Thesis, Gent University, Gent, Belgium, September 2016. [Google Scholar]
- Fettweis, M.; Baeye, M.; Lee, B.J.; Chen, P.; Yu, J.C.S. Hydro-meteorological influences and multimodal suspended particle size distributions in the Belgian nearshore area (southern North Sea). Geo-Mar. Lett. 2012, 32, 123–137. [Google Scholar] [CrossRef]
- Thorne, P.D.; Hanes, D.M. A review of acoustic measurement of small-scale sediment processes. Cont. Shelf Res. 2002, 22, 603–632. [Google Scholar] [CrossRef] [Green Version]
- Blott, S.J.; Pye, K. GRADISTAT: A grain size distribution and statistics package for the analysis of unconsolidated sediments. Earth Surf. Process. Landf. 2001, 26, 1237–1248. [Google Scholar] [CrossRef]
- Hartigan, J.A.; Wong, M.A. Algorithm AS 136: A K-Means Clustering Algorithm. Appl. Stat. 1979, 28, 100. [Google Scholar] [CrossRef]
- Kongsberg Maritime. EM Series Multibeam Echo Sounders Datagram Formats—850-160692/W; Kongsberg Maritime: Kongsberg, Norway, January 2018; Available online: https://www.km.kongsberg.com/ks/web/nokbg0397.nsf/AllWeb/253E4C58DB98DDA4C1256D790048373B/$file/160692_em_datagram_formats.pdf (accessed on 9 September 2018).
- QPS. Available online: http://www.qps.nl/display/main/home (accessed on 12 October 2018).
- SonarScope—Ifremer Fleet. Available online: http://flotte.ifremer.fr/fleet/Presentation-of-the-fleet/On-board-software/SonarScope (accessed on 12 October 2018).
- Qimera. Available online: http://www.qps.nl/display/qimera/Home;jsessionid=DC46DBAC82D50C8F37EAFDF66AD21338 (accessed on 2 November 2018).
- Ernstsen, V.B.; Noormets, R.; Hebbeln, D.; Bartholomä, A.; Flemming, B.W. Precision of high-resolution multibeam echo sounding coupled with high-accuracy positioning in a shallow water coastal environment. Geo-Mar. Lett. 2006, 26, 141–149. [Google Scholar] [CrossRef]
- International Hydrographic Organisation. Available online: https://www.iho.int/iho_pubs/standard/S-44_5E.pdf (accessed on 2 November 2018).
- Urick, R.J. The Absorption of Sound in Suspensions of Irregular Particles. J. Acoust. Soc. Am. 1948, 20, 283–289. [Google Scholar] [CrossRef]
- Hoitink, A.J.F.; Hoekstra, P. Observations of suspended sediment from ADCP and OBS measurements in a mud-dominated environment. Coast. Eng. 2005, 52, 103–118. [Google Scholar] [CrossRef]
- Van den Eynde, D.; Giardino, A.; Portilla, J.; Fettweis, M.; Francken, F.; Monbaliu, J. Modelling the effects of sand extraction, on sediment transport due to tides, on the Kwinte Bank. J. Coast. Res. 2010, 51, 101–116. [Google Scholar]
- Soulsby, R. Dynamics of Marine Sands: A Manual for Practical Applications, 1st ed.; Thomas Telford Publications: London, UK, 1997. [Google Scholar]
- Malik, M.; Lurton, X.; Mayer, L. A framework to quantify uncertainties of seafloor backscatter from swath mapping echosounders. Mar. Geophys. Res. 2018, 39, 151–168. [Google Scholar] [CrossRef]
- Fettweis, M.; Lee, B. Spatial and Seasonal Variation of Biomineral Suspended Particulate Matter Properties in High-Turbid Nearshore and Low-Turbid Offshore Zones. Water 2017, 9, 694. [Google Scholar] [CrossRef]
- Van Leeuwen, S.; Tett, P.; Mills, D.; van der Molen, J. Stratified and nonstratified areas in the North Sea: Long-term variability and biological and policy implications: North sea stratification regimes. J. Geophys. Res. Oceans 2015, 120, 4670–4686. [Google Scholar] [CrossRef]
- Rattray, A.; Ierodiaconou, D.; Monk, J.; Versace, V.; Laurenson, L. Detecting patterns of change in benthic habitats by acoustic remote sensing. Mar. Ecol. Prog. Ser. 2013, 477, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Montereale-Gavazzi, G.; Roche, M.; Lurton, X.; Degrendele, K.; Terseleer, N.; Van Lancker, V. Seafloor change detection using multibeam echosounder backscatter: Case study on the Belgian part of the North Sea. Mar. Geophys. Res. 2018, 39, 229–247. [Google Scholar] [CrossRef]
- Masselink, G.; Austin, M.J.; O’Hare, T.J.; Russell, P.E. Geometry and dynamics of wave ripples in the nearshore zone of a coarse sandy beach. J. Geophys. Res. 2007, 112. [Google Scholar] [CrossRef] [Green Version]
- Ernstsen, V.B.; Noormets, R.; Winter, C.; Hebbeln, D.; Bartholomä, A.; Flemming, B.W.; Bartholdy, J. Quantification of dune dynamics during a tidal cycle in an inlet channel of the Danish Wadden Sea. Geo-Mar. Lett. 2006, 26, 151–163. [Google Scholar] [CrossRef]
- Van Hoey, G.; Degraer, S.; Vincx, M. Macrobenthic community structure of soft-bottom sediments at the Belgian Continental Shelf. Estuar. Coast. Shelf Sci. 2004, 59, 599–613. [Google Scholar] [CrossRef] [Green Version]
- Degraer, S.; Verfaillie, E.; Willems, W.; Adriaens, E.; Vincx, M.; Van Lancker, V. Habitat suitability modelling as a mapping tool for macrobenthic communities: An example from the Belgian part of the North Sea. Cont. Shelf Res. 2008, 28, 369–379. [Google Scholar] [CrossRef] [Green Version]
- Rowden, A.A.; Jago, C.F.; Jones, S.E. Influence of benthic macrofauna on the geotechnical and geophysical properties of surficial sediment, North Sea. Cont. Shelf Res. 1998, 18, 1347–1363. [Google Scholar] [CrossRef]
- Degraer, S.; Moerkerke, G.; Rabaut, M.; Van Hoey, G.; Du Four, I.; Vincx, M.; Henriet, J.-P.; Van Lancker, V. Very-high resolution side-scan sonar mapping of biogenic reefs of the tube-worm Lanice conchilega. Remote Sens. Environ. 2008, 112, 3323–3328. [Google Scholar] [CrossRef]
- Huff, L. Acoustic Remote Sensing as a Tool for Habitat Mapping in Alaska Waters. In Marine Habitat Mapping Technology for Alaska; Reynolds, J., Greene, H., Eds.; Alaska Sea Grant, University of Alaska Fairbanks: Fairbanks, AK, USA, 2008; pp. 29–46. [Google Scholar]
- Zyserman, J.A.; Fredsøe, J. Data Analysis of Bed Concentration of Suspended Sediment. J. Hydraul. Eng. 1994, 120, 1021–1042. [Google Scholar] [CrossRef]
- Simmons, S.M.; Parsons, D.R.; Best, J.L.; Orfeo, O.; Lane, S.N.; Kostaschuk, R.; Hardy, R.J.; West, G.; Malzone, C.; Marcus, J.; et al. Monitoring Suspended Sediment Dynamics Using MBES. J. Hydraul. Eng. 2010, 136, 45–49. [Google Scholar] [CrossRef]
- Hawley, N. A Comparison of Suspended Sediment Concentrations Measured by Acoustic and Optical Sensors. J. Gt. Lakes Res. 2004, 30, 301–309. [Google Scholar] [CrossRef]
- Anderson, J.T.; Van Holliday, D.; Kloser, R.; Reid, D.G.; Simard, Y. Acoustic seabed classification: Current practice and future directions. ICES J. Mar. Sci. 2008, 65, 1004–1011. [Google Scholar] [CrossRef]
- Williams, K.L.; Jackson, D.R.; Tang, D.; Briggs, K.B.; Thorsos, E.I. Acoustic Backscattering from a Sand and a Sand/Mud Environment: Experiments and Data/Model Comparisons. IEEE J. Ocean. Eng. 2009, 34, 388–398. [Google Scholar] [CrossRef]
- Hammerstad, E. EM technical note: Backscattering and seabed image reflectivity. Horten Nor. Kongsberg Marit. AS 2000, 1–5. Available online: https://www.km.kongsberg.com/ks/web/nokbg0397.nsf/AllWeb/C2AE0703809C1FA5C1257B580044DD83/$file/EM_technical_note_web_BackscatteringSeabedImageReflectivity.pdf (accessed on 12 October 2018).
- Daniell, J.; Siwabessy, J.; Nichol, S.; Brooke, B. Insights into environmental drivers of acoustic angular response using a self-organising map and hierarchical clustering. Geo-Mar. Lett. 2015, 35, 387–403. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter/Echosounder | Kongsberg Maritime EM3002D | Kongsberg Maritime EM2040D |
|---|---|---|
| Number of soundings per ping | 508 | 800 |
| Central frequency | 300 kHz | 300 kHz |
| Pulse length | 150 µs | 108 µs |
| MBES Mode | Normal | Normal |
| Rx Beam spacing | High density equidistant | High density equidistant |
| Tx × Rx Beam width | 1.5° × 1.5° | 1° × 1° |
| Positioning System | MGB Tech with Septentrio AsteRx2eH RTK heading receiver | MGB Tech with Septentrio AsteRx2eL RTK receiver |
| Motion Sensor | Seatex MRU 5 | XBlue Octans |
| Sound Velocity Probe | Valeport mini SVS and SVP | Valeport mini SVS and SVP |
| Area | Depth and Sediment Dynamics * | Habitat Type (EUNIS Level 3 **) | Details on Environmental Setting |
|---|---|---|---|
| Kwinte swale | Depth (MLLWS): 25 m Water mass type: clear seawater Magnitude of sediment transport during Spring tide: <0.5 tonnes m−1d−1 | Offshore circalittoral gravelly hummocky/hillocky terrain (relatively well sorted medium sand with gravel) | In [30,46] |
| Westdiep swale | Depth (MLLWS): 15 m Water mass type: clear seawater Magnitude of sediment transport during Spring tide: 0.5–1 tonnes m−1d−1 | Circalittoral sandy/siliciclastic terrain (well sorted fine to medium sand) | In [47] |
| Zeebrugge, MOW1 pile | Depth (MLLWS): 10 m Water mass: Turbidity maximum zone Magnitude of sediment transport during Spring tide: >1 tonnes m−1d−1 | Circalittoral muddy sediments | [48,49] |
| Sensor | Measurements/Variables | Distance of Measurement from Seabed | Temporal/Spatial Resolution | Further Instrument Specifications | Calibration |
|---|---|---|---|---|---|
| ADV Ocean velocimetry @ 5 mHz | Current in x,y,z; Direction; Altimetry; Temperature; Salinity; Velocity | 0.2 mab | Bursts of 15 min. | www.sontek.com | NA |
| 2 × 2 cm measuring cell | |||||
| ABS Acoustic Backscatter Sensor @ 0.5, 1, 2, 4 MHz | SPMc; particle size | 1 mab | Bursts of 30 min. | www.aquatecgroup.com | Manufacturer calibration (implicit method) |
| 1 cm bins over 1 m profile | |||||
| Sequoia Scientific LISST 100-X (type-C) | Particle size and distribution; transmission; volume concentration | 2.4 mab | Bursts of 1 min. | www.sequoiasci.com | NA |
| OBS+ | SPMc | 2.35 mab | Bursts of 15 min. | www.campbellsci.com/d-a-instruments | Previous campaign calibration using in situ water samples (gravimetric analysis) |
| SBE 19+ SeaCAT Profiler CTD—OBS+ and 5L Niskin bottle | Temperature, Salinity, hydrostatic pressure; SPMc (from water filtrations of Niskin bottles) | ~2/3 mab | ~Every 1 h | www.campbellsci.com/d-a-instruments and www.seabird.com | OBS NTU * vs SPMc Calibration = R2 0.56 @ 3 ~ mab |
| 1. | Correction for sound absorption based on surface seawater properties (from the RV Belgica On-board Data Acquisition System—https://odnature.naturalsciences.be/belgica/en/odas) |
| 2. | Correction of the instantaneous insonified area using the real incidence angle as from the tide-corrected terrain model of the study site: the bathymetric surfaces are used to correctly allocate the backscatter snippet traces from single pings to their true seabed position. |
| 3. | Removal of all angle-dependent corrections introduced by the manufacturer (e.g., the Lambert and specular corrections in Kongsberg Maritime MBES data). |
| 4. | Per ROI: Computation of AR curves. |
| Variable/Spearman rho | Mean MBES BS |
|---|---|
| Tide level | −0.56 * |
| Curr. speed | 0.59 ** |
| ABS D50 (1 mab) | 0.24 |
| ABS SPM (1 mab) | −0.38 |
| OBS SPM (2.4 mab) | −0.66 ** |
| LISST Trans. (2.4 mab) | 0.84 **** |
| ADV curr. (Z) | 0.75 *** |
| ADV curr. cross-shore | −0.2 |
| ADV curr. alongshore | 0.58 ** |
| ADV altimetry | 0.54 * |
| Variable/Spearman Rho | Mean MBES BS |
|---|---|
| Mean Kongsberg QF | −0.61 **** |
| OBS SPMc 0.3 mab | −0.69 **** |
| OBS SPMc 1 mab | −0.40 ** |
| OBS SPMc 2.4 mab | −0.35 * |
| Experiment | Overall αW Error (dB/km) | Depth (m) | 0° (dB) | 45° (dB) | 70° (dB) | Uncertainty Score * |
|---|---|---|---|---|---|---|
| Kwinte swale | 2 | 30 | 0.11 | 0.17 | 0.35 | S |
| Westdiep swale | 2 | 20 | 0.08 | 0.11 | 0.23 | N-S |
| Zeebrugge MOW 1 | 1 | 10 | 0.02 | 0.028 | 0.05 | N |
| Experiment | Depth (m) | 0° (dB) | 45° (dB) | 70° (dB) | D50 Upper/Lower (µm) | Uncertainty Score |
|---|---|---|---|---|---|---|
| Westdiep swale | 15 | 0.13 | 0.18 | 0.38 | 100/100 | S |
| Zeebrugge MOW 1 | 10 | 0.35 | 0.48 | 1 | 63/125 | S |
| Mean Roll + Range | Mean Pitch + Range | Mean Heave + Range | Mean Heading + Range | Sea State * | |
|---|---|---|---|---|---|
| Exp. 1 | 0.6–0.5 | 0.3–0.24 | 0.006–0.03 | 204–12 | 2–0.1 to 0.5 m (Smooth wavelets) |
| Exp. 2 | 0.8–1.16 | 2.9–0.12 | 0.3–0.06 | 67.4–4 | 2 to 3–0.1 to 1.25 m (Slight) |
| Exp.3 | 3.2–0.65 | 1.2–0.22 | 0.007–0.08 | 60.6–12.3 | 1 to 2–0 to 0.5 m (Calm to Smooth wavelets) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Montereale-Gavazzi, G.; Roche, M.; Degrendele, K.; Lurton, X.; Terseleer, N.; Baeye, M.; Francken, F.; Van Lancker, V. Insights into the Short-Term Tidal Variability of Multibeam Backscatter from Field Experiments on Different Seafloor Types. Geosciences 2019, 9, 34. https://doi.org/10.3390/geosciences9010034
Montereale-Gavazzi G, Roche M, Degrendele K, Lurton X, Terseleer N, Baeye M, Francken F, Van Lancker V. Insights into the Short-Term Tidal Variability of Multibeam Backscatter from Field Experiments on Different Seafloor Types. Geosciences. 2019; 9(1):34. https://doi.org/10.3390/geosciences9010034
Chicago/Turabian StyleMontereale-Gavazzi, Giacomo, Marc Roche, Koen Degrendele, Xavier Lurton, Nathan Terseleer, Matthias Baeye, Frederic Francken, and Vera Van Lancker. 2019. "Insights into the Short-Term Tidal Variability of Multibeam Backscatter from Field Experiments on Different Seafloor Types" Geosciences 9, no. 1: 34. https://doi.org/10.3390/geosciences9010034
APA StyleMontereale-Gavazzi, G., Roche, M., Degrendele, K., Lurton, X., Terseleer, N., Baeye, M., Francken, F., & Van Lancker, V. (2019). Insights into the Short-Term Tidal Variability of Multibeam Backscatter from Field Experiments on Different Seafloor Types. Geosciences, 9(1), 34. https://doi.org/10.3390/geosciences9010034