Signal Processing of GPR Data for Road Surveys





Abstract
:1. Introduction
- The quality of a final processing outcome is highly affected by the quality of data collection. Signals with very low SNR values within a raw dataset are most likely to produce misleading results after processing.
- The level of complexity of a survey goal, i.e., the level of detail required, affects generally the amount of work needed for processing.
- The cost of processing, typically quantified in terms of time required or human resources allocated, needs to be considered at an early stage, as these factors may significantly affect the final quality of an output in a GPR survey.
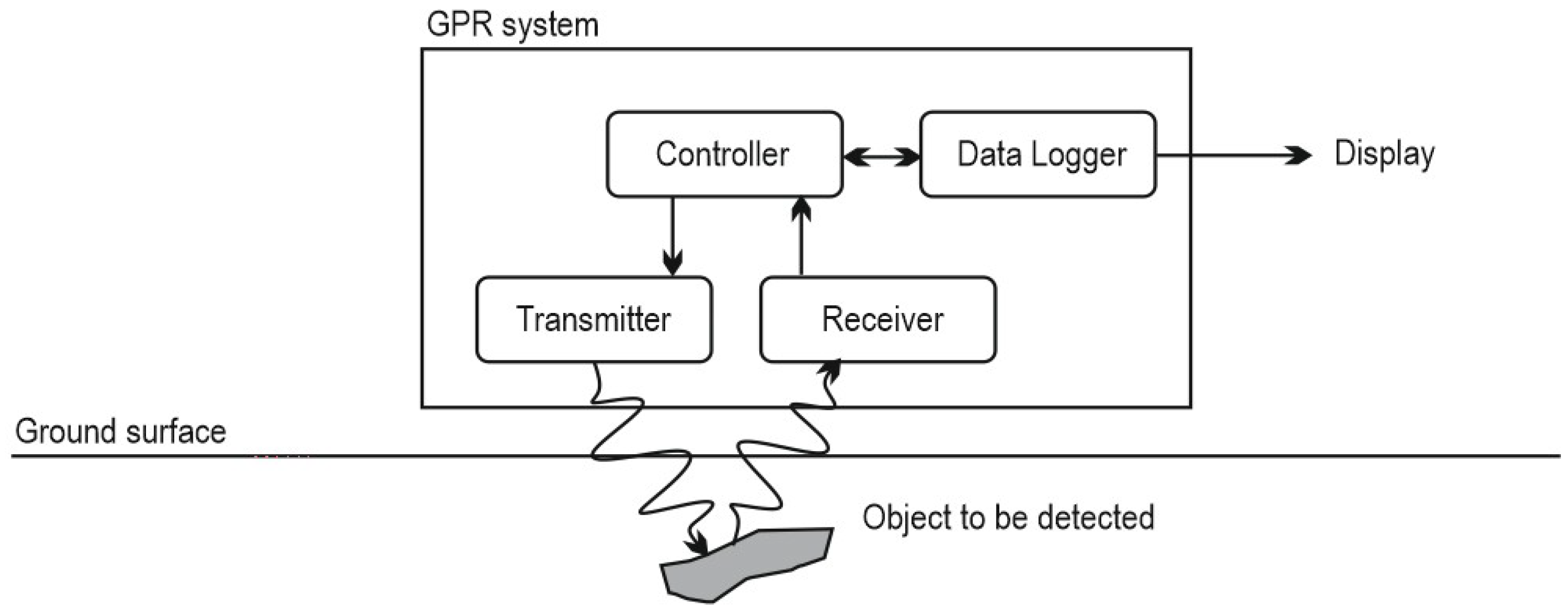
2. Ground Penetrating Radar
2.1. The GPR Technique
2.2. Main Survey Configurations
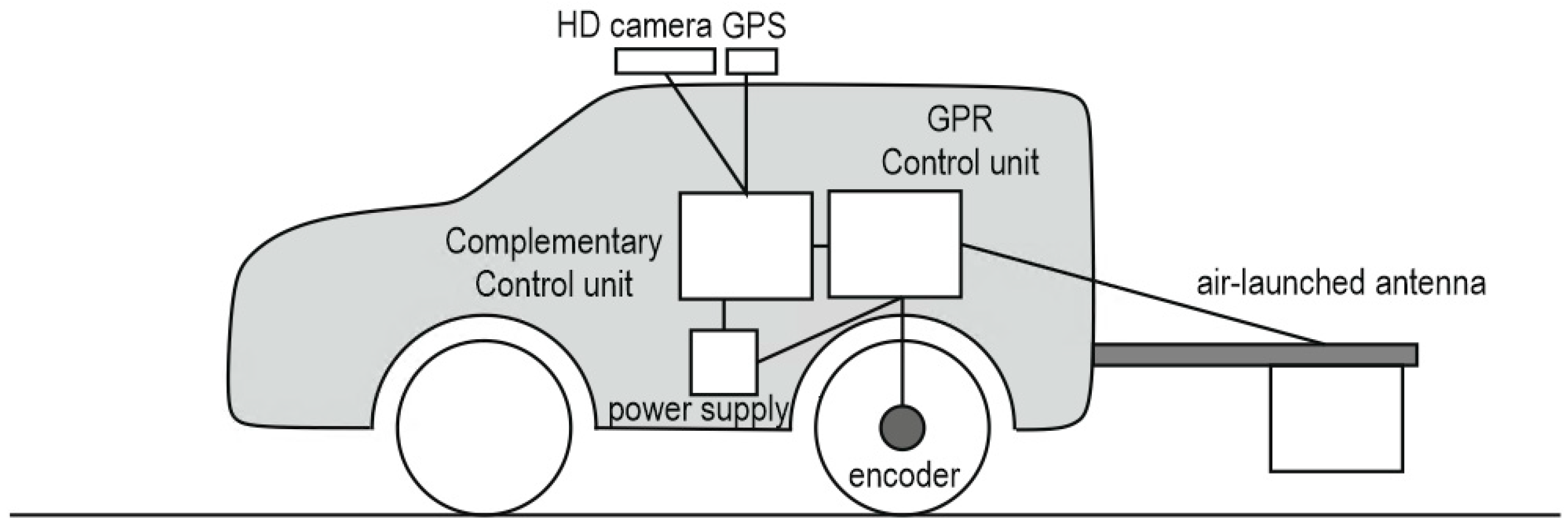
3. The GPR Dataset
4. The Processing Protocol
- Raw signal correction
- ○
- Removal of incoherent traces and replacement by interpolation
- ○
- Time-zero correction
- ○
- Elevation correction
- ○
- Energy normalization
- Lower frequency harmonics removal
- Removal of antenna ringing
- Signal gain
- Band-pass filtering
- Special processing steps
- ○
- Vertical or time resolution enhancement
- ○
- Migration or lateral resolution enhancement
- ○
- Time-to-depth conversion
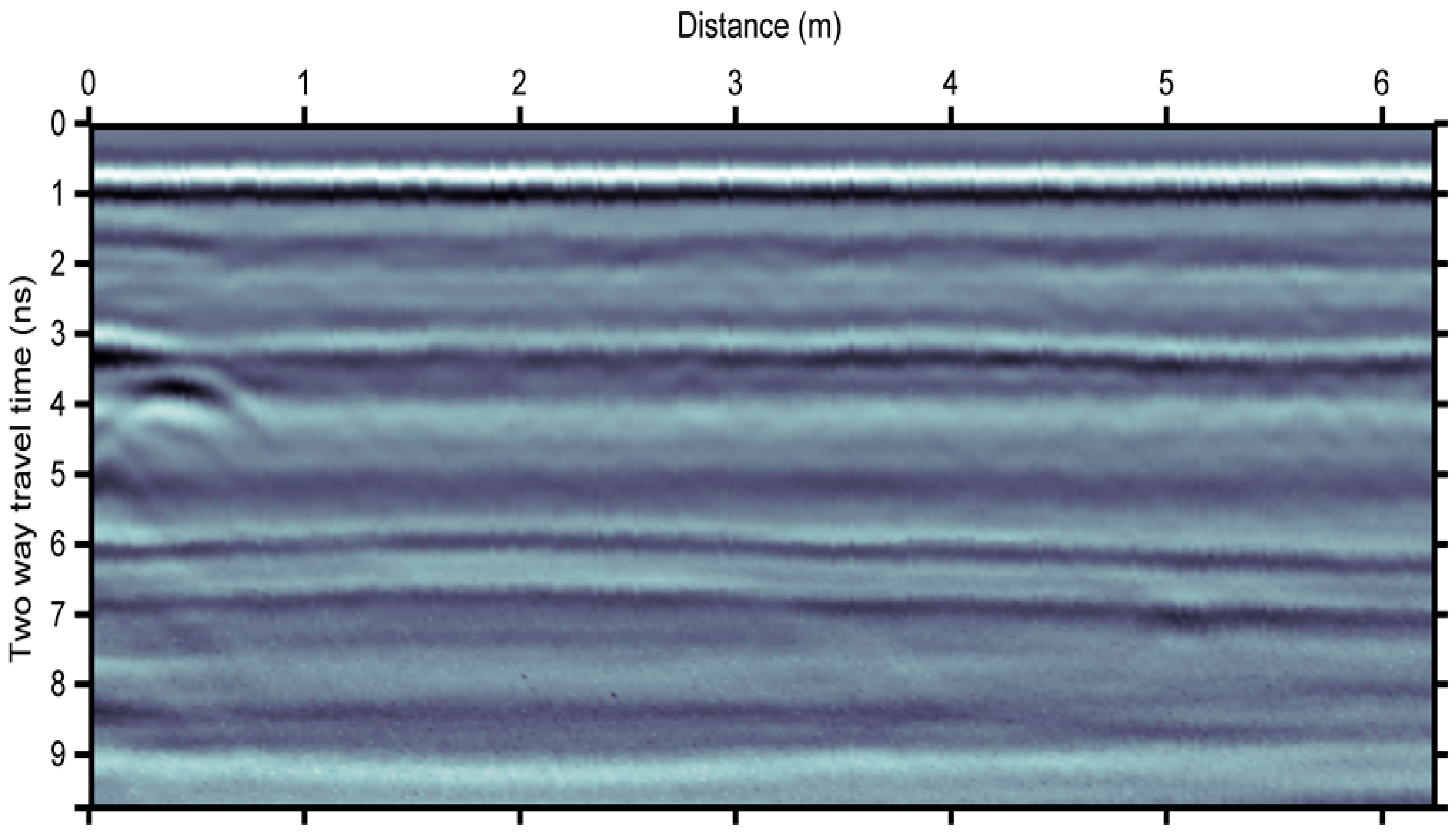
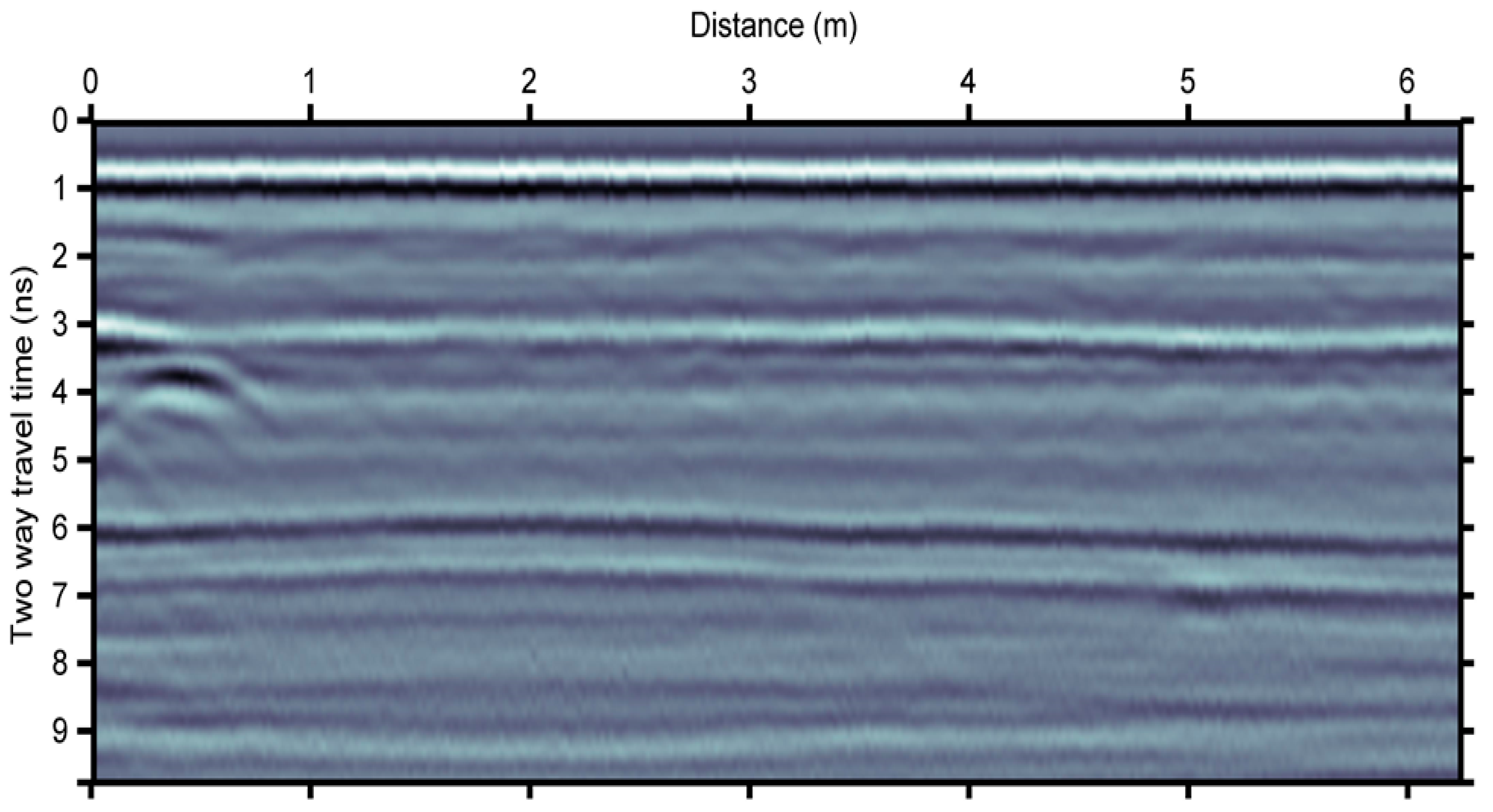
4.1. Raw Signal Correction
4.1.1. Removal of Incoherent Traces and Replacement by Interpolation
4.1.2. Time-Zero Correction
4.1.3. Elevation Correction
4.1.4. Energy Normalization
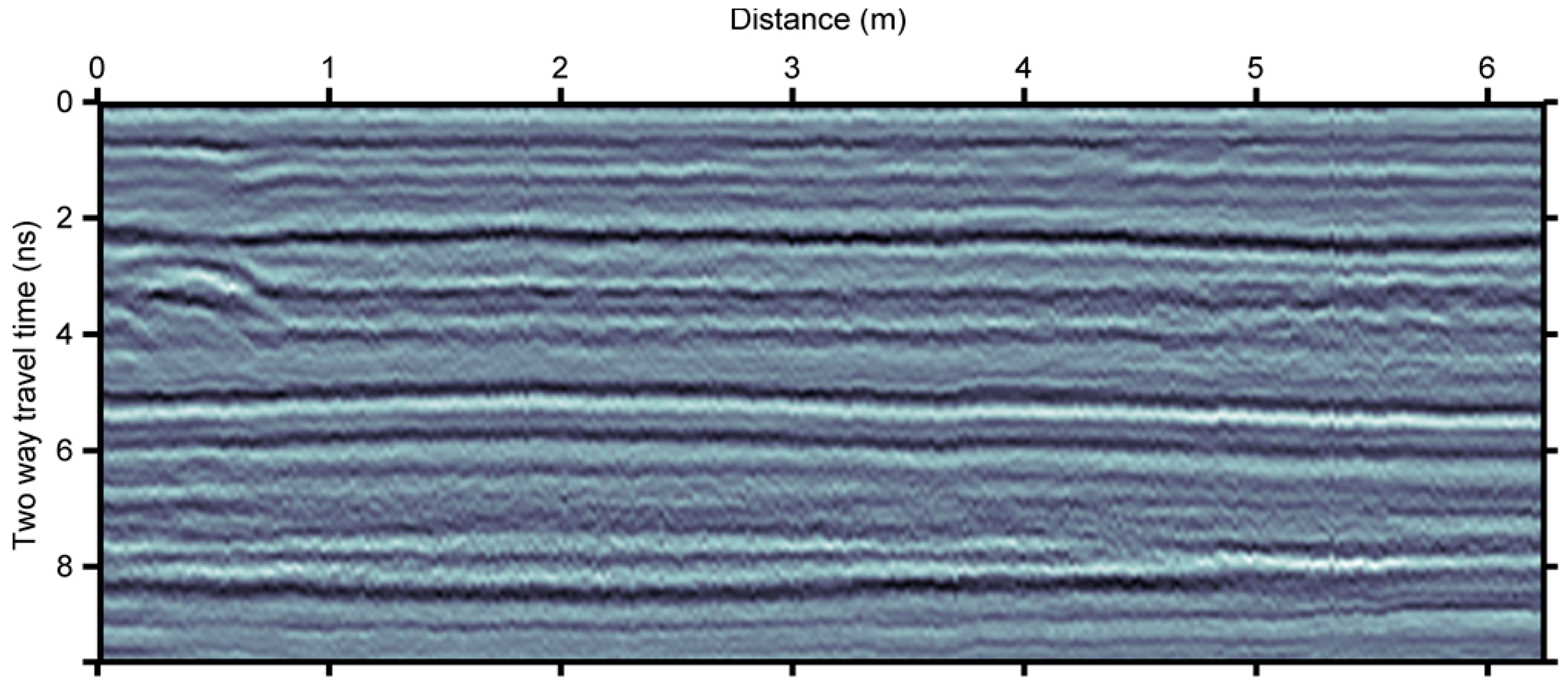
4.2. Lower Frequency Harmonics Removal
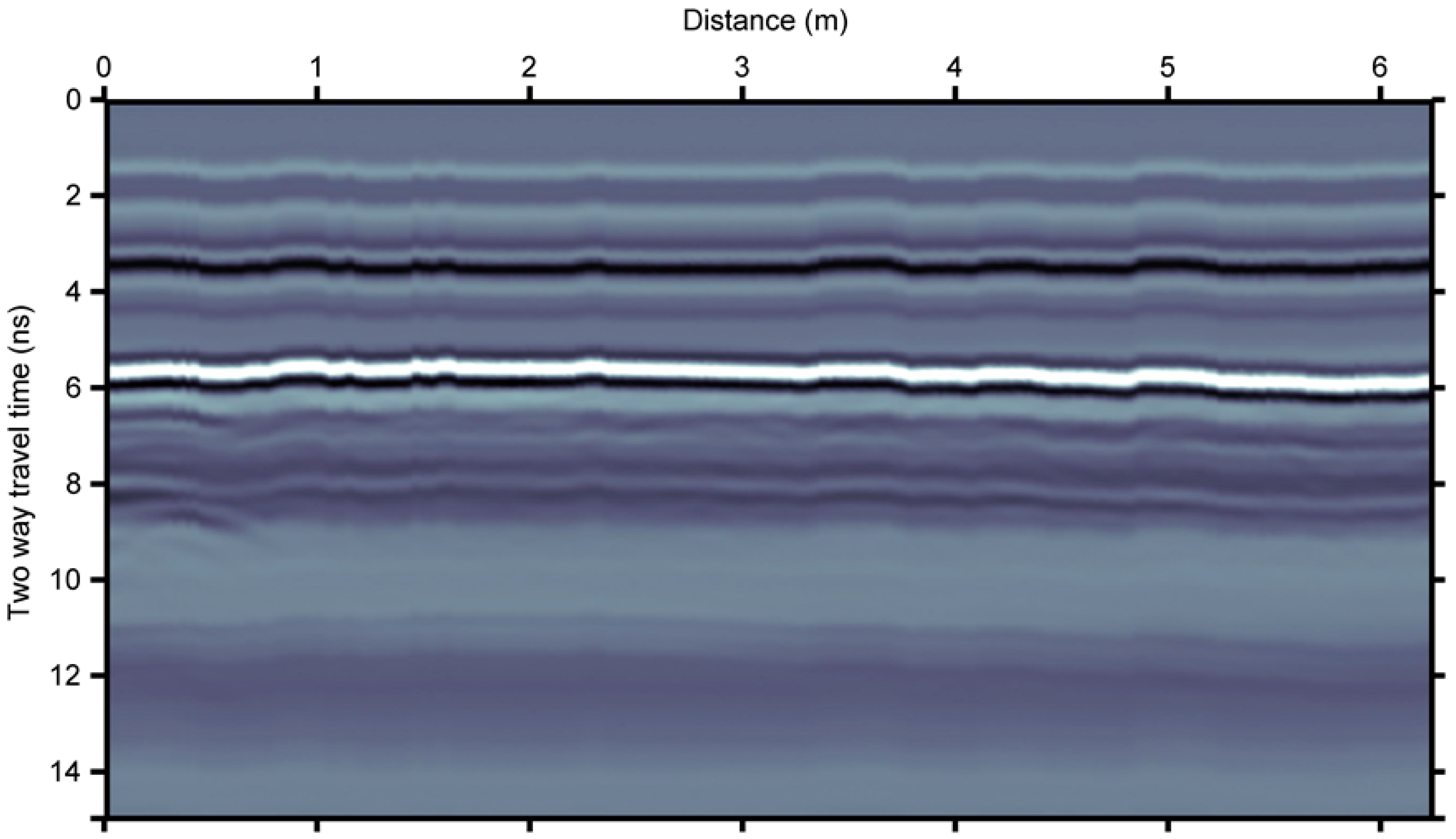
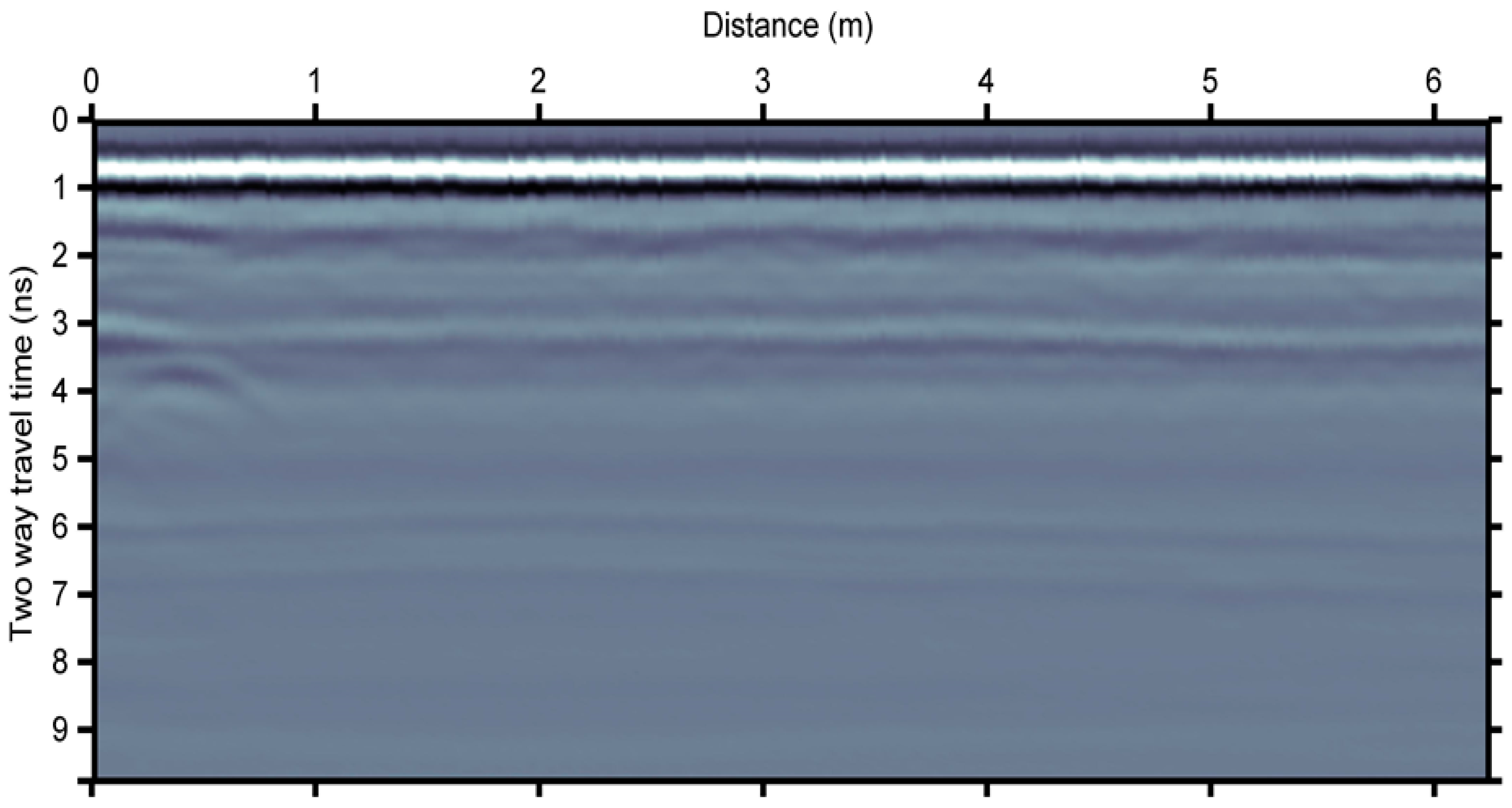
4.3. Removal of Antenna Ringing
- Part of the significant reflections may be removed. As horizontal-like reflections return amplitude peaks at the same arrival time, these are expected to be cut off once an average trace is subtracted to the entire radargram. This is a critical issue when pavement layering is the target of the investigation.
- Artifacts might be introduced by removing antenna ringing in homogeneous non-reflecting areas, as an average value is subtracted from amplitude values close to zero.
4.4. Signal Gain
- Automatic Gain Control (AGC). This is an automatic function that is applied to each trace of a GPR section. It is based on the difference between the average amplitude of a signal in a specific time window and the maximum amplitude of the overall trace [62]. A careful selection of the time-window is then crucial to avoid excessive noise or flat areas in the section [63].
- Spreading Exponential Compensation (SEC). This algorithm works automatically on the signal compensating the loss of energy by geometric spreading effects of the travelling wavefront [60]. A drawback of using SEC (sometimes named as Inverse Power Decay filter) is related to an incorrect selection of the exponential gain factor. To this effect, earlier time amplitudes are likely to be hidden by later time amplitudes due to amplification effects.
- Inverse Amplitude Decay (IAD). This is a data adaptive filter that calculates a main amplitude decay function for the whole GPR section. The inverse function is then applied to each trace. In this regard, lateral amplitude variation is maintained and amplitudes in a trace are more enhanced.
- User Defined Gain (UDG), Linear Gain, and Exponential Gain. These algorithms are based on functions with specific mathematical expressions. Most diffused algorithms apply a linear or exponential amplification of the signal in depth, although more complex expressions can be adopted at discretion of the user. Precaution is mostly recommended when using UDG, especially if the user is not experienced.
4.5. Band-Pass Filtering
4.6. Special Processing Steps
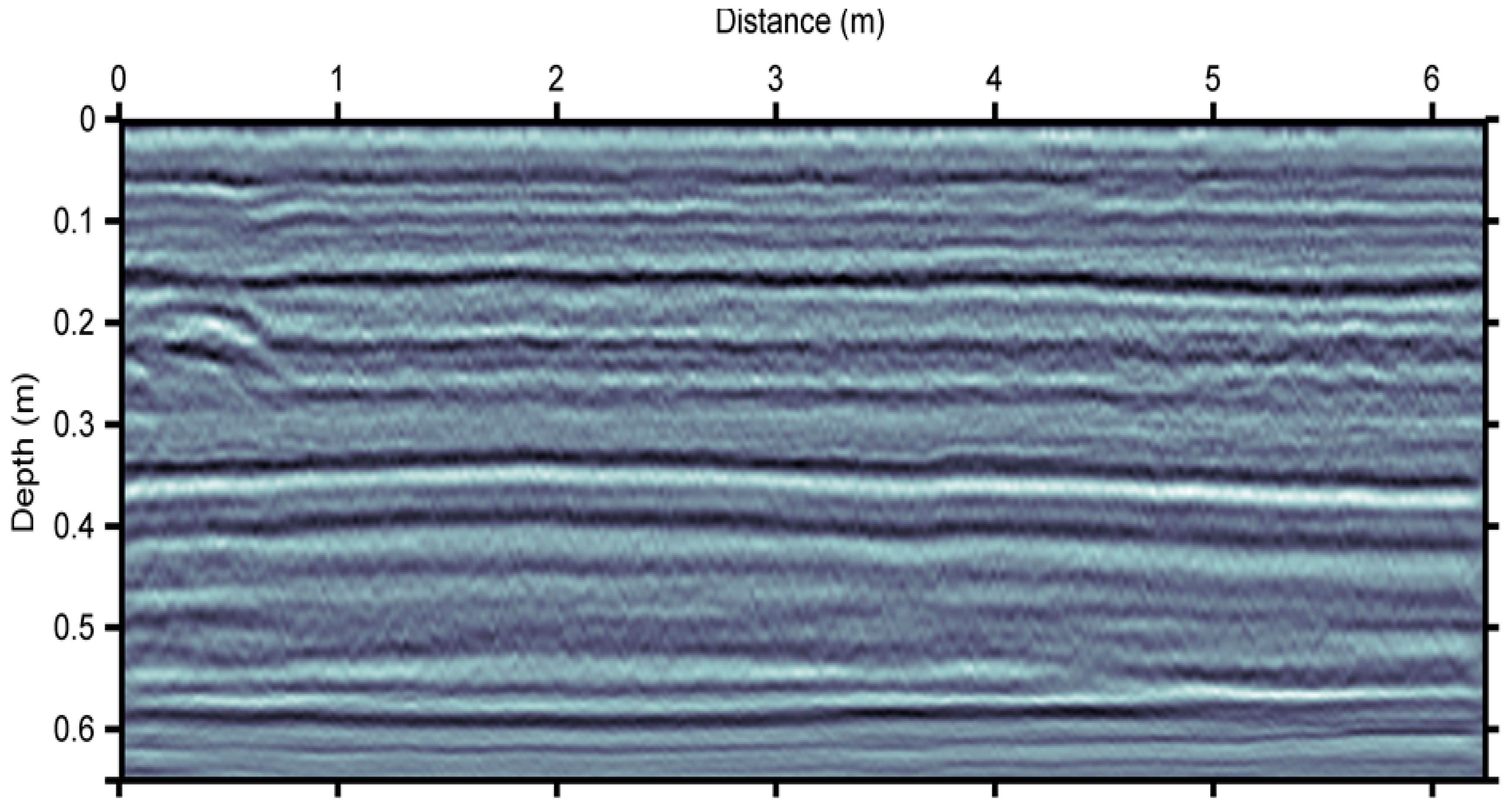
4.6.1. Vertical or Time Resolution Enhancement
4.6.2. Migration or Lateral Resolution Enhancement
4.6.3. Time-to-Depth Conversion
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- World Health Organisation. Global Status Report on Road Safety 2015; World Health Organisation: Geneve, Switzerland, 2015. [Google Scholar]
- European Commission. Towards a European Road Safety Area: Policy Orientations on Road Safety 2011–2020; COM(2010) 389, 2010; The European Automotive Manufacturers Association: Brussels, Belgium, 2010. [Google Scholar]
- Tighe, S.; Li, N.; Falls, L.C.; Haas, R. Incorporating road safety into pavement management. Transport. Res. Rec. 2000, 1699, 1–10. [Google Scholar] [CrossRef]
- Beskou, N.D.; Theodorakopoulos, D.D. Dynamic effects of moving loads on road pavements: A review. S. Dyn. Earthq. Eng. 2011, 31, 547–567. [Google Scholar] [CrossRef]
- D’Amico, F.; Calvi, A.; Bianchini Ciampoli, L.; Tosti, F.; Brancadoro, M.G. Evaluation of the impact of pavement degradation on driving comfort and safety using a dynamic simulation model. Adv. Transport. Stud. 2018, 1, 109–120. [Google Scholar] [CrossRef]
- Benedetto, A.; Tosti, F.; Bianchini Ciampoli, L.; D’Amico, F. An overview of ground-penetrating radar signal processing techniques for road inspections. Signal Process. 2017, 132, 201–209. [Google Scholar] [CrossRef] [Green Version]
- Marecos, V.; Fontul, S.; Antunes, M.L.; Solla, M. Evaluation of a highway pavement using non-destructive tests: Falling Weight Deflectometer and Ground Penetrating Radar. Constr. Build. Mater. 2017, 151, 1164–1172. [Google Scholar] [CrossRef]
- Frangopol, D.M.; Liu, M. Maintenance and management of civil infrastructure based on condition, safety, optimization, and life-cycle cost. Struct. Infrastruct. Eng. 2007, 1, 29–41. [Google Scholar] [CrossRef]
- Sheils, E.; O’Connor, A.; Breysse, D.; Schoefs, F.; Yotte, S. Development of a two-stage inspection process for the assessment of deteriorating infrastructure. Reliab. Eng. Syst. Saf. 2010, 1, 29–41. [Google Scholar] [CrossRef]
- Capozzoli, L.; Rizzo, E. Combined NDT techniques in civil engineering applications: Laboratory and real test. Constr. Build. Mater. 2017, 154, 1139–1150. [Google Scholar] [CrossRef]
- Sebaaly, B.E.; Mamlouk, M.S.; Davies, T.G. Dynamic analysis of falling weight deflectometer data. Transport. Res. Rec. 1986, 1070, 63–68. [Google Scholar]
- Rohde, G.T. Determining pavement structural number from FWD testing. Transport. Res. Rec. 1994, 1448, 61–68. [Google Scholar]
- Mehta, Y.; Roque, R. Evaluation of FWD data for determination of layer moduli of pavements. J. Mater. Civ. Eng. 2003, 15, 25–31. [Google Scholar] [CrossRef]
- Cosenza, P.; Marmet, E.; Rejiba, F.; Jun, C.Y.; Tabbagh, A.; Charlery, Y. Correlations between geotechnical and electrical data: A case study at Garchy in France. J. Appl. Geophys. 2006, 60, 165–178. [Google Scholar] [CrossRef]
- Maślakowski, M.; Kowalczyk, S.; Mieszkowski, R.; Józefiak, K. Using electrical resistivity tomography (ERT) as a tool in geotechnical investigation of the substrate of a highway. Stud. Quat. 2014, 31, 83–89. [Google Scholar] [CrossRef]
- Saarenketo, T.; Scullion, T. Road evaluation with ground penetrating radar. In Proceedings of the 7th International Conference on Ground-Penetrating Radar (GPR98), Lawrence, KS, USA, 27–30 May 1998. [Google Scholar] [CrossRef]
- Benedetto, A.; Pensa, S. Indirect diagnosis of pavement structural damages using surface GPR reflection techniques. J. Appl. Geophys. 2007, 62, 107–123. [Google Scholar] [CrossRef]
- Loizos, A.; Plati, C. Accuracy of ground penetrating radar horn-antenna technique for sensing pavement subsurface. IEEE Sens. J. 2007, 7, 842–850. [Google Scholar] [CrossRef]
- Lahouar, S.; Al-Qadi, I.L. Automatic detection of multiple pavement layers from GPR data. Non-Destr. Test. Eval. Int. 2008, 41, 69–81. [Google Scholar] [CrossRef]
- Fernandes, F.M.; Fernandes, A.; Pais, J. Assessment of the density and moisture content of asphalt mixtures of road pavements. Constr. Build. Mater. 2017, 154, 1216–1225. [Google Scholar] [CrossRef]
- Liu, H.; Sato, M. In situ measurement of pavement thickness and dielectric permittivity by GPR using an antenna array. Non-Destr. Test. Eval. Int. 2014, 64, 65–71. [Google Scholar] [CrossRef]
- Tosti, F.; Bianchini, C.L.; D’Amico, F.; Alani, A.M.; Benedetto, A. An experimental-based model for the assessment of the mechanical properties of road pavements using ground-penetrating radar. Constr. Build. Mater. 2018, 165, 966–974. [Google Scholar] [CrossRef]
- Maser, K.R.; Roddis, W.M.K. Principles of thermography and radar for bridge deck assessment. J. Transp. Eng. 1990, 116, 583–601. [Google Scholar] [CrossRef]
- Mothé, M.G.; Leite, L.F.M.; Mothé, C.G. Thermal characterization of asphalt mixtures by TG/DTG, DTA and FTIR. J. Therm. Anal. Calorim. 2008, 93, 105–109. [Google Scholar] [CrossRef]
- Solla, M.; Lagüela, S.; González-Jorge, H.; Arias, P. Approach to identify cracking in asphalt pavement using GPR and infrared thermographic methods: Preliminary findings. Non-Destr. Test. Eval. Int. 2014, 62, 55–65. [Google Scholar] [CrossRef]
- Chang, K.T.; Chang, J.R.; Liu, J.K. Detection of pavement distresses using 3D laser scanning technology. In Proceedings of the 2005 ASCE International Conference on Computing in Civil Engineering, Cancun, Mexico, 12–15 July 2005; pp. 1085–1095. [Google Scholar]
- Guan, H.; Li, J.; Cao, S.; Yu, Y. Use of mobile LiDAR in road information inventory: A review. Int. J. Image Data Fusion 2016, 7, 219–242. [Google Scholar] [CrossRef]
- Daniel, D.J. Ground Penetrating Radar, 2nd ed.; The Institution of Electrical Engineers: London, UK, 2004. [Google Scholar]
- Slob, E.C.; Sato, M.; Olhoeft, G. Surface and borehole ground-penetrating-radar developments. Geophysics 2010, 75, 75A103–75A120. [Google Scholar] [CrossRef]
- Benedetto, F.; Tosti, F.; Alani, A.M. An entropy-based analysis of GPR data for the assessment of railway ballast conditions. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3900–3908. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Lahouar, S. Measuring layer thicknesses with GPR - Theory to practice. Constr. Build. Mater. 2005, 19, 763–772. [Google Scholar] [CrossRef]
- Bastard, C.L.; Baltazart, V.; Wang, Y.; Saillard, J. Thin-pavement thickness estimation using GPR with high-resolution and superresolution methods. IEEE Trans. Geosci. Remote Sens. 2007, 45, 2511–2519. [Google Scholar] [CrossRef]
- Loizos, A.; Plati, C. Accuracy of pavement thicknesses estimation using different ground penetrating radar analysis approaches. Non-Destr. Test. Eval. Int. 2014, 62, 55–65. [Google Scholar] [CrossRef]
- Maser, K.R. Condition assessment of transportation infrastructure using ground-penetrating radar. J. Infr. Syst. 1996, 43, 119–138. [Google Scholar] [CrossRef]
- Al-Qadi, I.L.; Lahouar, S.; Loulizi, A. In situ measurements of hot-mix asphalt dielectric properties. Non-Destr. Test. Eval. Int. 2001, 34, 427–434. [Google Scholar] [CrossRef]
- Chen, D.H.; Scullion, T. Forensic investigations of roadway pavement failures. J. Perform. Constr. Facil. 2008, 22, 35–44. [Google Scholar] [CrossRef]
- Saarenketo, T. Electrical properties of water in clay and silty soils. J. Appl. Geophys. 1998, 40, 73–88. [Google Scholar] [CrossRef]
- Benedetto, A. Water content evaluation in unsaturated soil using GPR signal analysis in the frequency domain. J. Appl. Geophys. 2010, 71, 26–35. [Google Scholar] [CrossRef]
- Tosti, F.; Benedetto, A.; Bianchini Ciampoli, L.; Lambot, S.; Patriarca, C.; Slob, E.C. GPR analysis of clayey soil behaviour in unsaturated conditions for pavement engineering and geoscience applications. Near Surf. Geophys. 2016, 14, 127–144. [Google Scholar] [CrossRef]
- Dérobert, X.; Iaquinta, J.; Klysz, G.; Balayssac, J.-P. Use of capacitive and GPR techniques for the non-destructive evaluation of cover concrete. Non-Destr. Test. Eval. Int. 2008, 62, 55–65. [Google Scholar] [CrossRef]
- Alani, A.M.; Aboutalebi, M.; Kilic, G. Applications of ground penetrating radar (GPR) in bridge deck monitoring and assessment. J. App. Geophys. 2013, 97, 45–54. [Google Scholar] [CrossRef]
- Diamanti, N.; Annan, A.P.; Redman, J.D. Concrete Bridge Deck Deterioration Assessment Using Ground Penetrating Radar (GPR). J. Environ. Eng. Geophys. 2017, 22, 121–132. [Google Scholar] [CrossRef]
- Benedetto, F.; Tosti, F. A signal processing methodology for assessing the performance of ASTM standard test methods for GPR systems. Signal Process. 2017, 132, 327–337. [Google Scholar] [CrossRef] [Green Version]
- ASTM International. ASTM D6087-08(2015)e1, Standard Test Method for Evaluating Asphalt-Covered Concrete Bridge Decks Using Ground Penetrating Radar. Available online: https://www.astm.org/Standards/D6087.htm (accessed on 10 December 2018).
- Saarenketo, T. NDT Transportation. In Ground Penetrating Radar; Elsevier: Amsterdam, The Netherlands, 2009; pp. 393–444. [Google Scholar]
- Golgowski, G. Arbeitsanleitung fur den Einsatz des Georadarszur Gewinnung von Bestandsdaten des Fahrbahnaufbaues; AbteilungStraßenbautechnik: Berlin, Germany, 2003. [Google Scholar]
- Sebesta, S.; Scullion, T. Using Infrared Imaging and Ground-Penetrating Radar to Detect Segregation in Hot-Mix Asphalt Overlays; Research Report 4126-1; Texas Department of Transportation, Texas A&M University: College Station, TX, USA, 2002. [Google Scholar]
- Clark, M.R.; Gillespie, R.; Kemp, T.; McCann, D.M.; Forde, M.C. Electromagnetic properties of railway ballast. Non-Destr. Test. Eval. Int. 2004, 34, 305–311. [Google Scholar] [CrossRef]
- Puente, I.; Solla, M.; González-Jorge, H.; Arias, P. NDT documentation and evaluation of the roman bridge of lugo using GPR and mobile and static LiDAR. J. Perform. Constr. Facil. 2015, 29. [Google Scholar] [CrossRef]
- Annan, A.P. Practical processing of GPR data. In Proceedings of the EAGE 2001 Conference, Delft, The Netherlands, 11–15 June 2001. [Google Scholar]
- Persico, R. Introduction to Ground Penetrating Radar: Inverse Scattering and Data Processing; Wiley Blackwell: Hoboken, NJ, USA, 2014. [Google Scholar]
- Olhoeft, G.R. Maximizing the information return from ground penetrating radar. J. Appl. Geophys. 2000, 43, 175–187. [Google Scholar] [CrossRef]
- Nobes, D.C. Geophysical surveys of burial sites: A case study of the Oarourupa. Geophysics 1999, 64, 357–367. [Google Scholar] [CrossRef]
- Yelf, R. Where is true time zero? In Proceedings of the Tenth International Conference on Grounds Penetrating Radar GPR 2004, Delft, The Netherlands, 21–24 June 2004. [Google Scholar]
- Davis, J.L.; Annan, A.P. Ground penetrating radar to measure soil water content. In Methods of Soil Analysis, Part 4; Dane, J.H., Topp, G.C., Eds.; Soil Science Society of America (SSSA): Washington, DC, USA, 2002; pp. 446–463. [Google Scholar]
- Dougherty, E.R. Optimal mean-absolute-error filtering of gray-scale signals by the morphological hit-or-miss transform. J. Math. Imaging Vis. 1994, 4, 255–271. [Google Scholar] [CrossRef]
- Gerlitz, K.; Knoll, M.D.; Cross, G.M.; Luzitano, R.D.; Knight, R. Processing ground penetrating radar data to improve resolution of near-surface targets. In Proceedings of the Symposium on the Application of Geophysics to Engineering and Environmental Problems, San Diego, CA, USA, 18–22April 1993. [Google Scholar]
- Battista, B.M.; Addison, A.D.; Knapp, C.C. Empirical Mode Decomposition Operator for Dewowing GPR Data. J. Environ. Eng. Geophys. 2009, 14, 163–169. [Google Scholar] [CrossRef] [Green Version]
- Lambot, S.; Slob, E.C.; Van Bosch, I.D.; Stockbroeckx, B.; Vanclooster, M. Modeling of ground-penetrating radar for accurate characterization of subsurface electric properties. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2555–2568. [Google Scholar] [CrossRef]
- Soldovieri, F.; Lopera, O.; Lambot, S. Combination of advanced inversion techniques for an accurate target localization via GPR for demining applications. IEEE Trans. Geosci. Remote Sens. 2011, 49, 451–461. [Google Scholar] [CrossRef]
- De Coster, A.; Lambot, S. Full-Wave Removal of Internal Antenna Effects and Antenna-Medium Interactions for Improved Ground-Penetrating Radar Imaging. IEEE Trans. Geosci. Remote Sens. 2019, 57, 93–103. [Google Scholar] [CrossRef]
- Jol, H. Ground Penetrating Radar: Theory and Applications; Elsevier: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Horstmeyer, H.; Gurtner, M.; Buker, F.; Green, A. Processing 2-D and 3-D georadar data: Some special requirements. In Proceedings of the Second Meeting of the Environmental and Engineering Geophysical Society, European section, Nantes, France, 2–5 September 1996. [Google Scholar]
- Economou, N.; Vafidis, A. Spectral balancing GPR data using time-variant bandwidth in the t-f domain. Geophysics 2010, 75, J19–J27. [Google Scholar] [CrossRef]
- Sun, J.; Young, R.A. Recognizing surface scattering in ground-penetrating radar data. Geophysics 1995, 60, 1378–1385. [Google Scholar] [CrossRef]
- Bano, M.; Pivot, F.; Methelot, J.M. Modelling and Filtering of Surface Scattering in Ground-penetrating Radar Waves. First Break 1999, 17, 215–222. [Google Scholar] [CrossRef]
- Nuzzo, L. Coherent noise attenuation in GPR data linear and parabolic radon transform techniques. Ann. Geophys. 2003, 46, 533–547. [Google Scholar] [CrossRef]
- Spagnolini, U. Permittivity measurements of multi layered media with monostatic pulse radar. IEEE Trans. Geosci. Remote Sens. 1997, 35, 454–463. [Google Scholar] [CrossRef]
- Chahine, K.; Vincent, B.; Wang, Y.; Dérobert, X. Blind deconvolution via sparsity maximization applied to GPR data. Eur. J. Environ. Civ. Eng. 2011, 15, 575–586. [Google Scholar] [CrossRef]
- Economou, N.; Vafidis, A. Deterministic deconvolution for GPR data in t-f domain. Near Surf. Geophys. 2011, 9, 427–433. [Google Scholar] [CrossRef]
- Fisher, E.; McMechan, G.A.; Annan, A.P.; Cosway, S.W. Examples of reverse-time migration of single-channel, ground-penetrating radar profiles. Geophysics 1992, 57, 577–586. [Google Scholar] [CrossRef]
- Tillard, S.; Dubois, J.C. Influence and lithology on radar echoes: Analysis with respect to electromagnetic parameters and rock anisotropy. Spec. Paper—Geol. Surv. Finl. 1992, 16, 95–102. [Google Scholar]
- Zhao, S.; Al-Qadi, I.L. Super-Resolution of 3-D GPR Signals to Estimate Thin Asphalt Overlay Thickness Using the XCMP Method. IEEE Trans. Geosci. Remote Sens. 2018. in Press. [Google Scholar] [CrossRef]
- Economou, N. Time varying band pass filtering GPR data by self- inverse filtering. Near Surf. Geophys. 2016, 14, 207–217. [Google Scholar]
- Lavoué, F.; Brossier, R.; Métivier, L.; Garambois, S.; Virieux, J. Two-dimensional permittivity and conductivity imaging by full waveform inversion of multioffset GPR data: A frequency-domain quasi-Newton approach. Geophys. J. Int. 2014, 197, 248–268. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NDT | Acronym | Applications | References |
|---|---|---|---|
| Falling Weight Deflectometer | FWD | pavement stiffness measurement | [11,12,13] |
| Electrical Resistivity Tomography | ERT | presence of voids, moisture assessment | [14,15] |
| Ground Penetrating Radar | GPR | structural detailing, deep defects detection, moisture/clay evaluation | [16,17,18,19,20,21,22] |
| Infrared Thermography | IRT | defects detection, moisture assessment | [23,24,25] |
| Terrestrial Laser Scanner | TLS | surface defects detection | [26,27] |
| Application | References |
|---|---|
| Evaluation of layer thicknesses | [31,32,33] |
| Assessment of damage condition in hot-mixed asphalt (HMA) layers, unbound layers and subgrade soils | [34,35,36] |
| Water and clay content assessment | [37,38,39] |
| Inspection of concrete structural elements | [40,41,42] |
| Layer | Type of Structure | Thickness (m) |
|---|---|---|
| Wearing | Hot Mix Asphalt (HMA) | 0.06 |
| Binder | HMA | 0.10 |
| Base | Bitumen-bond granular | 0.20 |
| Subbase | Granular | 0.20 |
| Layer | Material | Depth (m) | Picked Time (ns) | Velocity (m/ns) |
|---|---|---|---|---|
| Wearing | HMA | 0.06 | 0.86 | 0.140 |
| Binder | HMA | 0.16 | 2.38 | 0.131 |
| Base | Bitumen-bound granular | 0.36 | 5.53 | 0.127 |
| Subbase | Loose granular | 0.56 | 7.83 | 0.174 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bianchini Ciampoli, L.; Tosti, F.; Economou, N.; Benedetto, F. Signal Processing of GPR Data for Road Surveys. Geosciences 2019, 9, 96. https://doi.org/10.3390/geosciences9020096
Bianchini Ciampoli L, Tosti F, Economou N, Benedetto F. Signal Processing of GPR Data for Road Surveys. Geosciences. 2019; 9(2):96. https://doi.org/10.3390/geosciences9020096
Chicago/Turabian StyleBianchini Ciampoli, Luca, Fabio Tosti, Nikos Economou, and Francesco Benedetto. 2019. "Signal Processing of GPR Data for Road Surveys" Geosciences 9, no. 2: 96. https://doi.org/10.3390/geosciences9020096
APA StyleBianchini Ciampoli, L., Tosti, F., Economou, N., & Benedetto, F. (2019). Signal Processing of GPR Data for Road Surveys. Geosciences, 9(2), 96. https://doi.org/10.3390/geosciences9020096