1. Introduction
The process for developing novel medical devices, procedural delivery systems, and/or next generation devices can be long, arduous, and extremely costly. For example, many steps must be taken to ensure that the device will fit correctly within a specified patient population. Typically, animal and cadaver studies are conducted to assist in determining such parameters for a device to fit into the relative anatomies [
1]. While these studies offer many benefits, they are costly and time-consuming, and anatomies can vary greatly from living patients. Thus, medical device innovators are seeking novel methodologies, such as computational modeling, to gain further insights into device designs [
2,
3]. This has initiated an increased use of computational modeling by medical device innovators to assist in the design, refinement, and/or validation of their devices [
4].
Software packages from companies such as Materialise (Mimics and 3-Matic suites; Leuven, Belgium) have greatly aided in the creation (segmentation) of computational 3D models. Digital Imaging and Communications in Medicine (DICOM) files such as those obtained from computed tomography (CT) or magnetic resonance imaging (MRI) from cadaveric or clinical cases can be uploaded to these software packages for segmentation. Anatomical measurements can be abstracted from these 3D models, which is largely beneficial for improving the understanding of a wide variety of human anatomies. These measurements can also be utilized to quantify the statistical distributions of specific anatomical features within various patient populations [
5,
6].
In addition, medical device models can be computationally implanted into the anatomical models and subsequently 3D printed, thereby offering additional unique insights relative to the interactions between a given device and a patient’s specific anatomy. Performing these implants in several anatomical models demonstrates how these devices would likely fit within varied patient anatomies. In other words, the generated 3D printed models grant further knowledge about implant site anatomies, clinical procedures, and optimal device placements, further enabling refinement of the device design to better fit an initial target population before performing expensive and time-consuming cadaver and/or animal studies. These anatomy-device models are also useful for explaining novel medical technologies to physicians. The 3D printed models help facilitate discussions between physicians and device engineers. The function of the model can be educational (explaining how the device functions) or beneficial for gaining iterative device prototype feedback (demonstrating a prototype device computationally placed in a heart and receiving feedback from physicians on how to improve the next iteration of the device).
Additionally, 3D prints of computational device placements within anatomical models offer benefits outside of medical device design. These 3D printed models can be utilized by clinical care teams to better communicate the details of a surgical procedure or as intervention amongst themselves and/or with a patient or their family. For example, investigators seeking to quantify these benefits have found that 3D printed anatomical models significantly improved patient understanding of the planned procedure and relevant anatomy [
7], thus bridging the gap of knowledge between clinical care teams and their patients.
Here we demonstrate the ability to computationally place devices within varied and detailed 3D human cardiac models. These devices were placed in a variety of locations within anatomical models, as a means to study the device–tissue interface at differing implant sites. Devices were also placed in a number of different computational models with varied anatomies, allowing for the determination of ideal device placement locations, as well as for the characterization of variances in anatomical delivery pathways. Finally, these models were sliced to yield views of specific internal anatomies that would not be possible on the original specimen without destroying it.
2. Materials and Methods
Human hearts deemed not viable for transplant were gifted to the Visible Heart
® Laboratories for research through LifeSource, a regional organ procurement agency (St. Paul, Minnesota, MN, USA). Occasionally, these cardiac specimens were reanimated on an external perfusion apparatus utilizing Visible Heart
® methodologies, allowing for capture of functional internal anatomy videos [
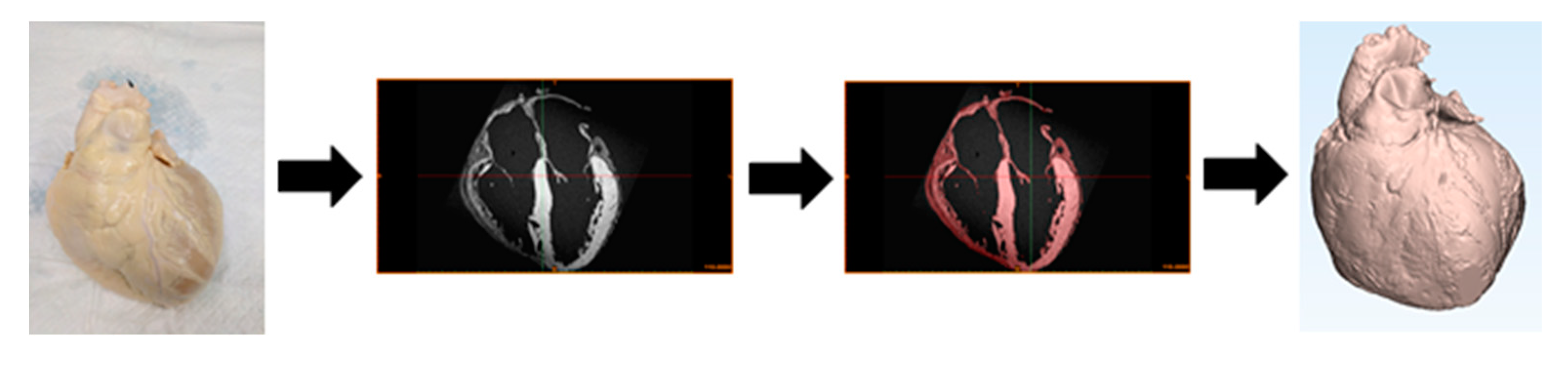
8]. These isolated cardiac samples were perfusion fixed in an end-diastolic state and subsequently placed in agar gel, then MRI scanned utilizing a 3T MRI scanner at a resolution of 100 micrometers (Siemens Trio, Washington, DC, USA). Utilizing MRI scans of perfusion-fixed samples allows us to achieve high anatomic resolution, which is critical to perform virtual prototyping. Note that this is 10× greater resolution than can be obtained with clinical imaging, since the patient heart is living and moving. The DICOM generated from these scans was segmented utilizing Mimics software (version 20.0; Materialise). The process of segmentation involved creating 2D masks by classifying pixels as to whether they represent cardiac tissue on each scan slice. The 2D masks were compiled within Mimics to create a 3D anatomical model of the cardiac specimen. The model was then imported into 3-Matic software (version 14.0; Materialise) for processing, editing, and analysis of the 3D anatomical mesh (
Figure 1).
To date, the Visible Heart® Laboratories have generated over 100 detailed 3D models of human cardiac anatomies, including a wide range of pathologies. These models can be utilized to gain critical insights into complex cardiac anatomies and alteration associated with disease states. Models of medical device prototypes can be computationally implanted in these anatomical models, allowing for analysis of device–tissue interactions and unique understanding of spatial relationships. The 3D models can offer distinctive views of specific internal anatomies and computationally placed devices.
The Visible Heart
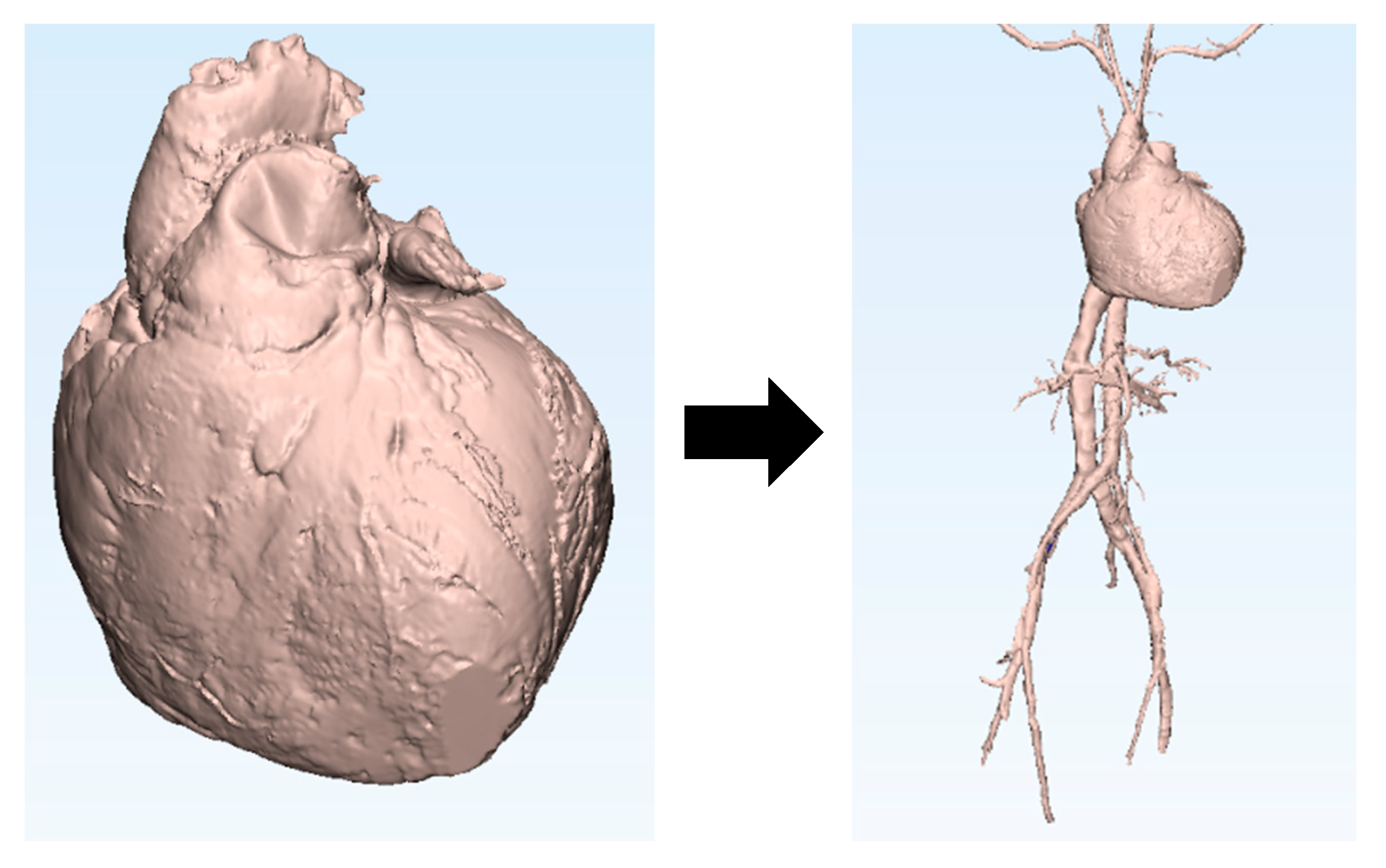
® Laboratories have also generated 3D models of peripheral vasculatures (
Figure 2). These datasets were obtained by scanning fresh cadavers that were donated through the Anatomy Bequest Program at the University of Minnesota. Large volumes of contrast dye (>2 L) were injected through the venous and arterial systems before or while obtaining CT scans. To date, 3D models of the major vasculatures between the subclavian veins and arteries down to the femoral veins and arteries have been generated from multiple cadaver scans. These vasculature models can be computationally added to previously generated heart models to simulate possible delivery pathways for a variety of cardiac devices, e.g., those commonly delivered through the femoral and subclavian veins or arteries.
Finally, these models can be 3D printed utilizing either Stratasys (Rehovot, Israel) GrabCAD Print version 1.30 software and uPrint SE Plus 3D printers, or Ultimaker (Utrecht, The Netherlands) Cura 4.1.0 software and Ultimaker 3E 3D printers. Numerous models were printed utilizing polylactic acid (PLA) filament for the model material and polyvinyl alcohol (PVA) filament for the support material. These 3D printed models clearly depict three-dimensional spatial information between various patient anatomies and computationally placed devices, thus enabling further quantitative analysis of computationally implanted devices within a wide range of anatomies.
3. Results and Discussion
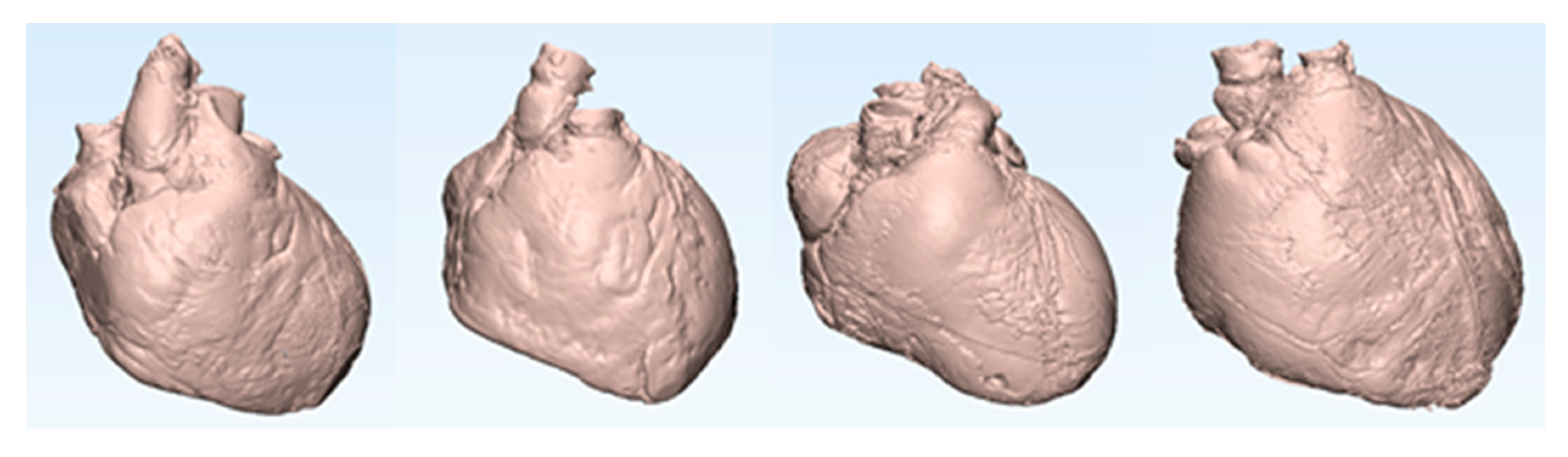
Here we describe a set of 3D models generated from four distinct human hearts utilizing the aforementioned methodology. Relevant information about each patient is summarized in
Table 1. These models are displayed in attitudinally correct anatomical orientation in
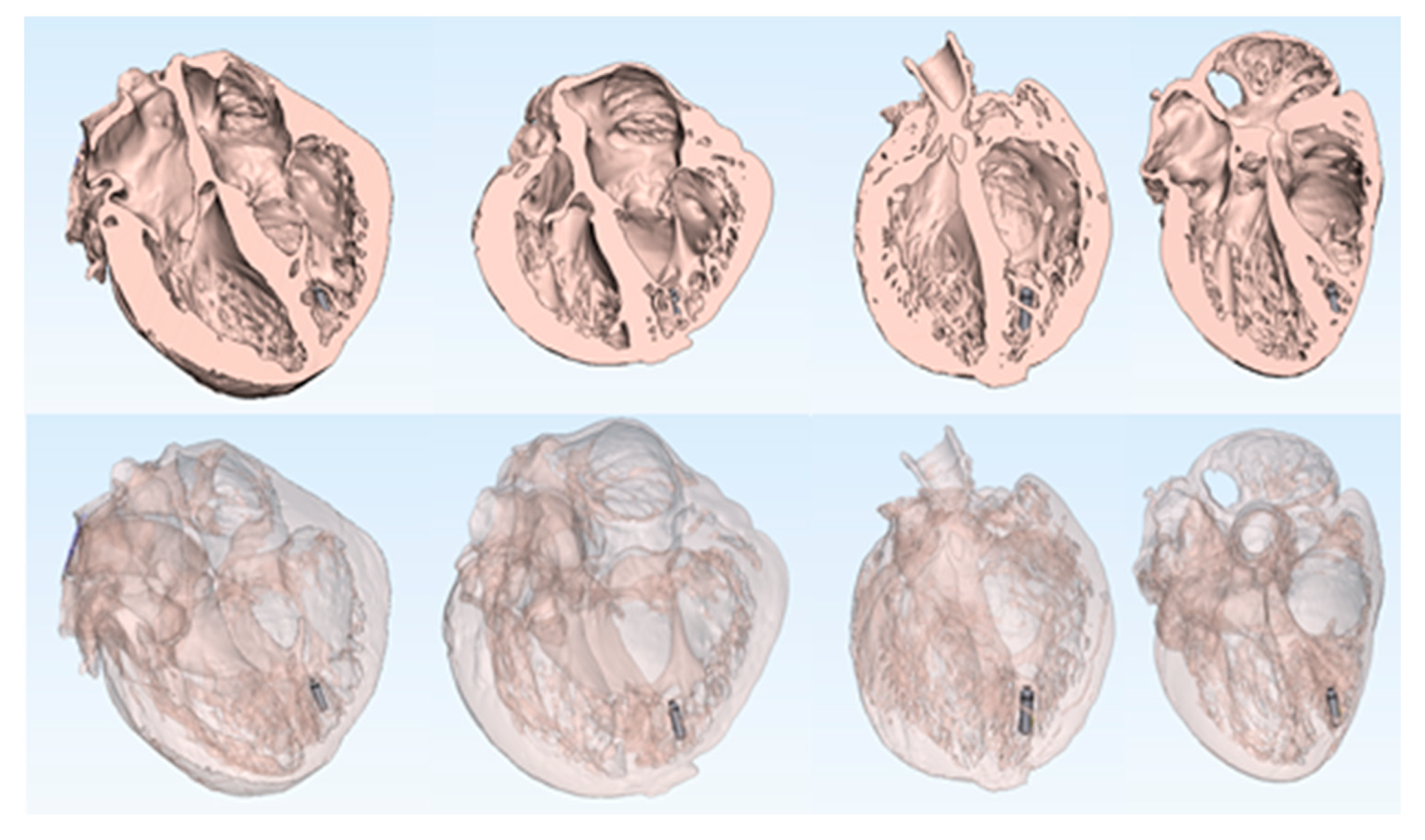
Figure 3. A Micra
TM transcatheter pacing system (TPS) (Medtronic, Minneapolis, MN, USA) was computationally implanted into the right ventricular apex of each patient’s heart model. Each heart model was then sliced along the coronal plane to offer a clear view of the anterior half of the heart and the resultant computational implant locations of these Micra
TM devices.
Further, implanting this device in a variety of models allows for the characterization of device placement within varied human anatomy (
Figure 4). Since the Micra
TM TPS has only one size, it was originally imperative to understand how the device fit within a range of human heart sizes.
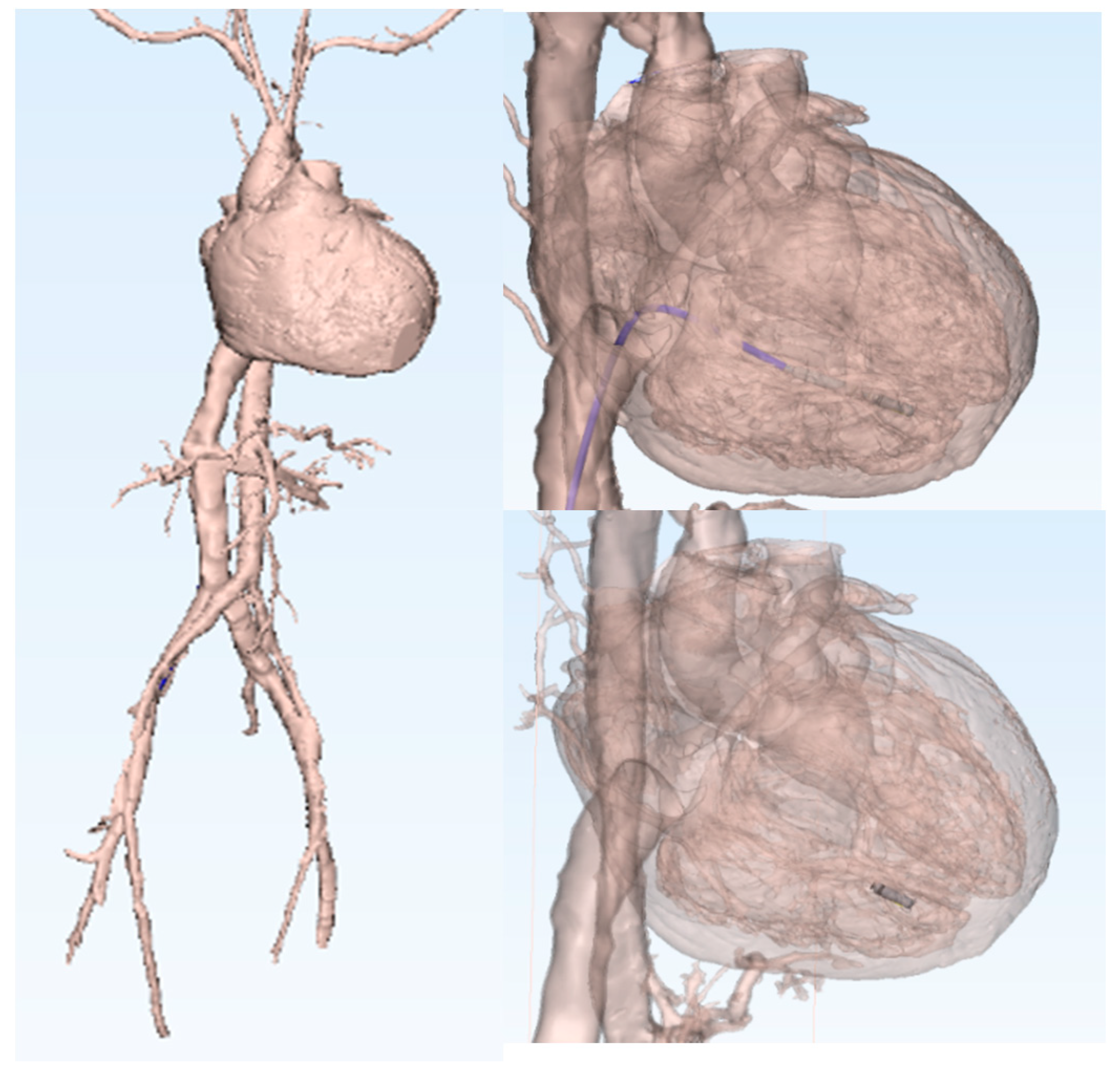
Computational vasculature anatomies obtained from a cadaver CT scan were digitally added to the heart (
Figure 5). This can then be utilized to model the delivery pathways, e.g., from implant into the vasculature upward from femoral veins and/or arteries up to the modeled heart. Further, we have been able to computationally add the delivery catheter for the Micra
TM TPS into the modeled vascular pathway. In other words, we computationally modeled the Micra
TM TPS implant along the entire delivery vascular pathway of the device, from the access point into the femoral vein, up through the inferior vena cava, right atrium, and finally into the right ventricular apex. This model, and other similar models, allow device designers to understand the anatomical constraints that affect the delivery of the Micra
TM TPS to an ideal target location—a crucial step due to this large bore delivery catheter (23 French). Such insights should further enable design requirements to be established for a delivery catheter system, even before expensive animal and cadaver experiments are initiated. Additionally, these computational models can be used to help determine the constraints or boundary conditions of given anatomical sites, e.g., those that a catheter will be able to navigate and deploy a Micra
TM TPS within, for patients with similar anatomy.
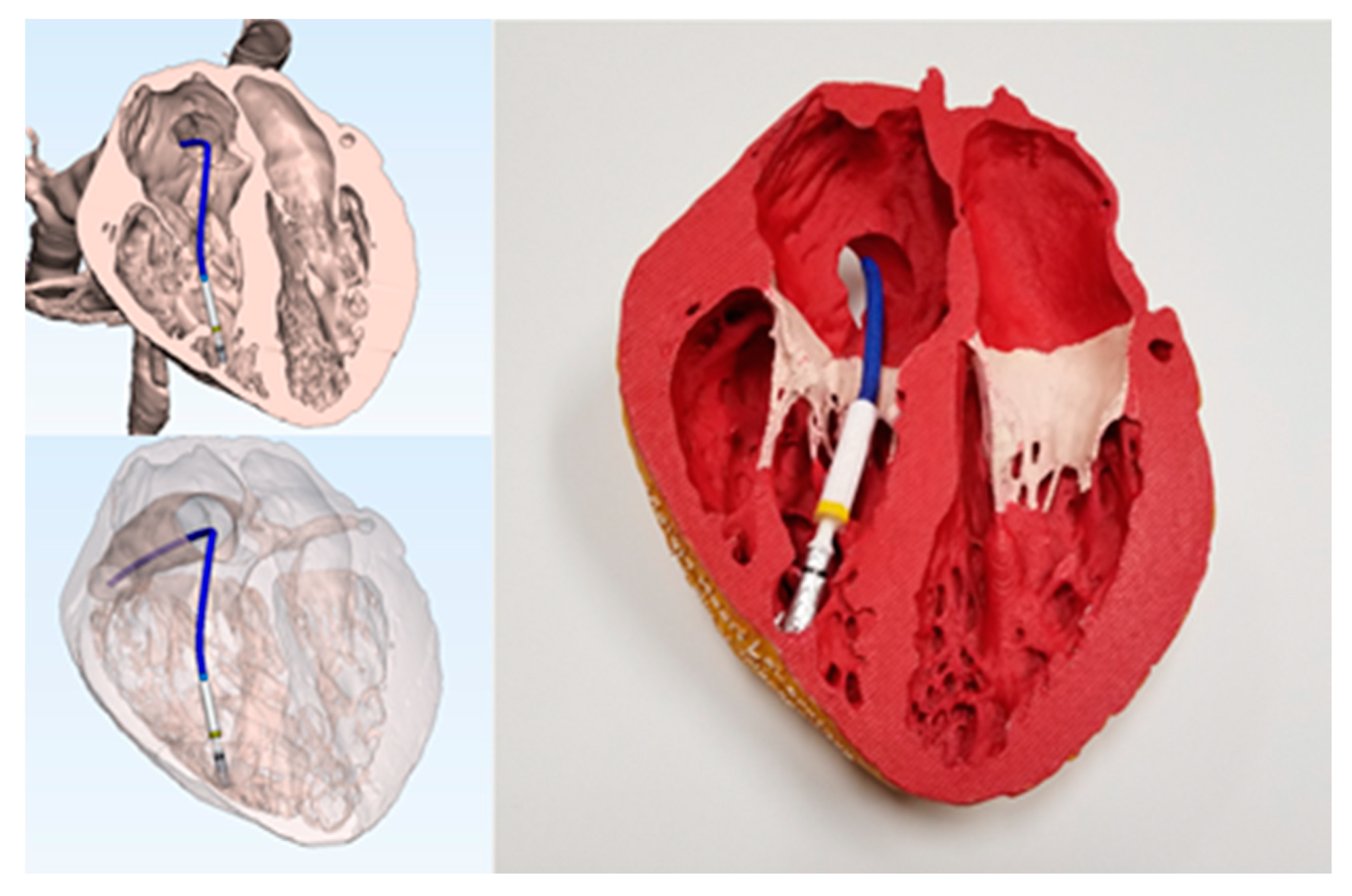
Shown in
Figure 6, this model was digitally sliced along the coronal plane to reveal the posterior half of the heart and the computationally placed Micra
TM TPS and delivery catheter. This model was then 3D printed and hand painted to highlight the different anatomical features as well the implant system and Micra
TM TPS (the implanted device). This printed and painted model offers a realistic representation of a device implanted in a human patient, and its interaction with the surrounding anatomical features.
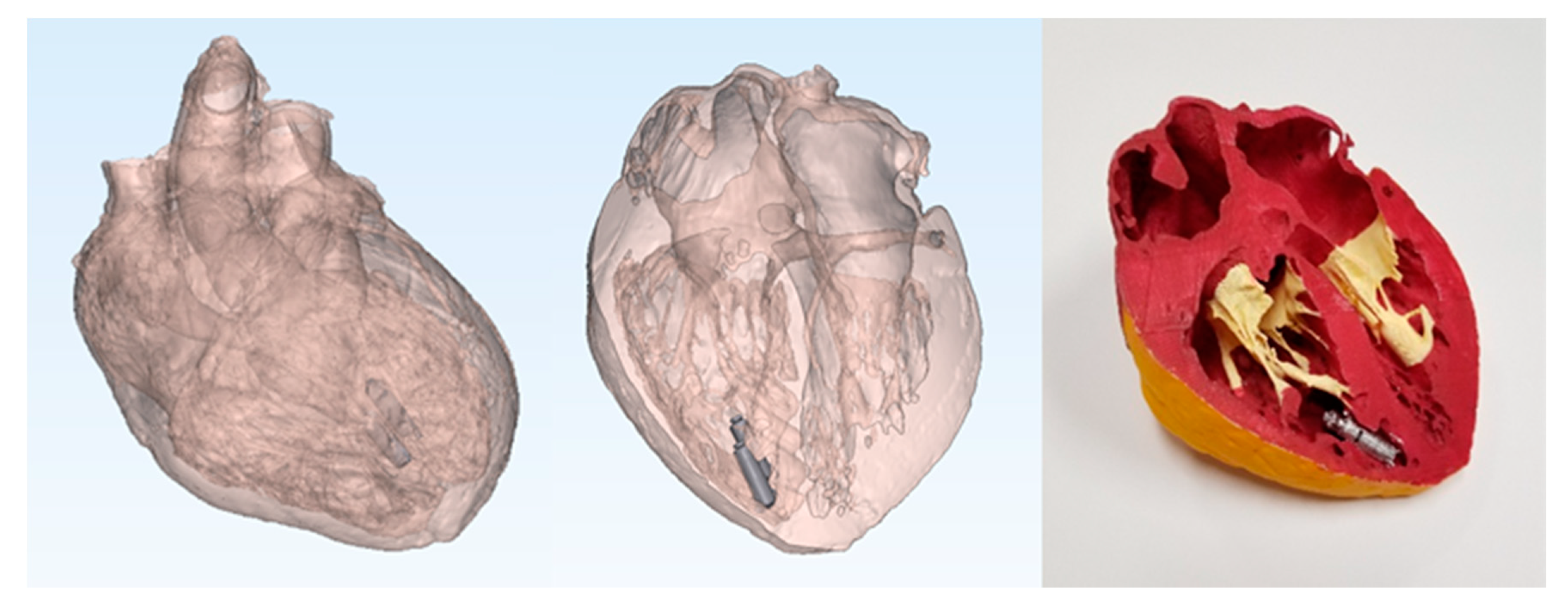
During early Micra
TM TPS development and physician feedback sessions, it was questioned if more than one Micra
TM TPS could be implanted within a patient’s heart (e.g., for end of device life replacement). Thus, designers needed to understand that the large volume of the right ventricle would allow for the placement of non-interacting concomitant Micra
TM TPS within the same chamber. Fresh human cadaveric studies were performed on a small set of human hearts [
9]. In
Figure 7, we can visualize that a second Micra
TM TPS was computationally deployed within this detailed cardiac anatomy, to simulate the spatial conditions where multiple Micra
TM TPS were implanted within a patient’s right ventricle. The heart model was sliced along the coronal plane to reveal a four-chamber view of the posterior half of the heart. The model was then 3D printed for further analyses and educational use (
Figure 7).
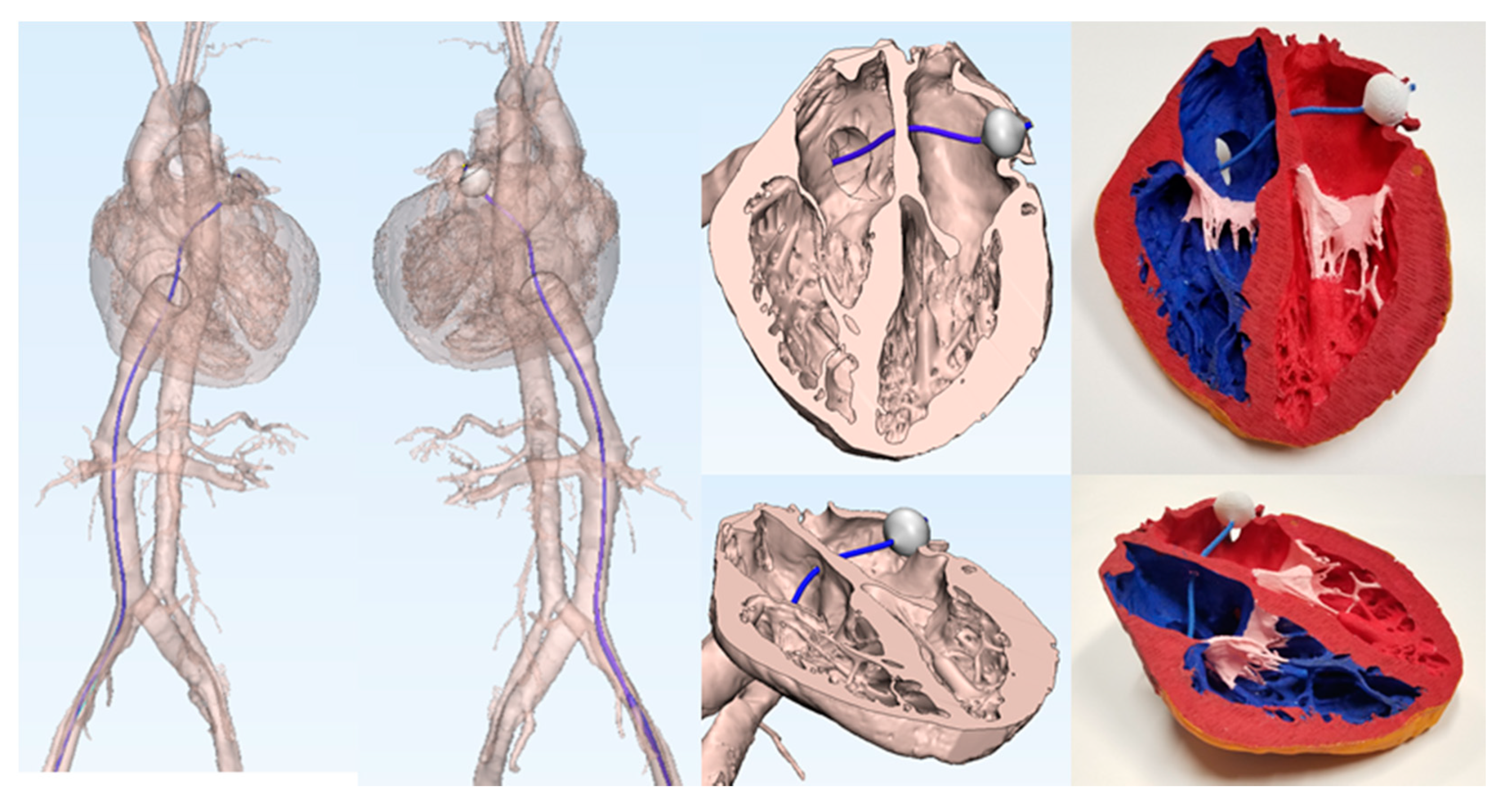
In another example of the value of computationally placed cardiac devices within these detailed human heart models, a Medtronic Arctic Front cryoballoon catheter was computationally placed within a human heart model (
Figure 8). This human heart model had vasculature from a cadaver computationally added to simulate the delivery pathway required to navigate the cryoballoon from the access point within the femoral vein, proximally up to the left superior pulmonary vein ostia within the left atrium. This ablation balloon placement procedure requires an initial atrial transseptal puncture, which here was computationally placed into an anatomically accurate location on the atrial septal wall of the human heart model. The resulting computational model was 3D printed and has been utilized as an educational tool to explain the necessary steps of this complex procedure to medical students, residents, fellows, clinicians, patients, and/or medical device designers.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}