1. Introduction
Distributed generation (DG) technology is characterized by low environmental pollution, high energy utilization rate, and flexible installation sites, which enhances the power supply reliability of the distribution network. Particularly in the case of natural disasters, it ensures the basic energy supply of critical infrastructure and residents in the remote areas [
1]. To coordinate the contradiction between DGs’ intermittent characteristics and bulk power system, and fully exploit the benefit of DGs, the concept of microgrid was proposed at the beginning of this century [
2]. A microgrid consists of distributed renewable resources, energy storage system, and various types of loads. It is capable of operating in either a grid-connected mode or an islanded mode, and handling the transitions between these two operation modes. In an islanded microgrid, the conventional control strategy produces the output voltage deviations from their nominal values as well as the failure of reactive power sharing among DGs connected via different line impedances, thereby affecting the power supply quality and system dynamic performance of microgrids [
3,
4].
The hierarchical control structure is an effective way for the coordination of multiple DGs in microgrids [
5]. In order to maintain the stability of frequency and voltage, the primary control of a microgrid employs a droop control method that is completely decentralized and only depends on local information without requiring any communication between the DGs. However, the droop control causes deviations of the voltage and frequency from their nominal values. Hence, the secondary control level is necessary to compensate for the deviations caused by the primary droop technique. The tertiary control level is aimed at the economical dispatch and optimized management of power flow in the microgrid.
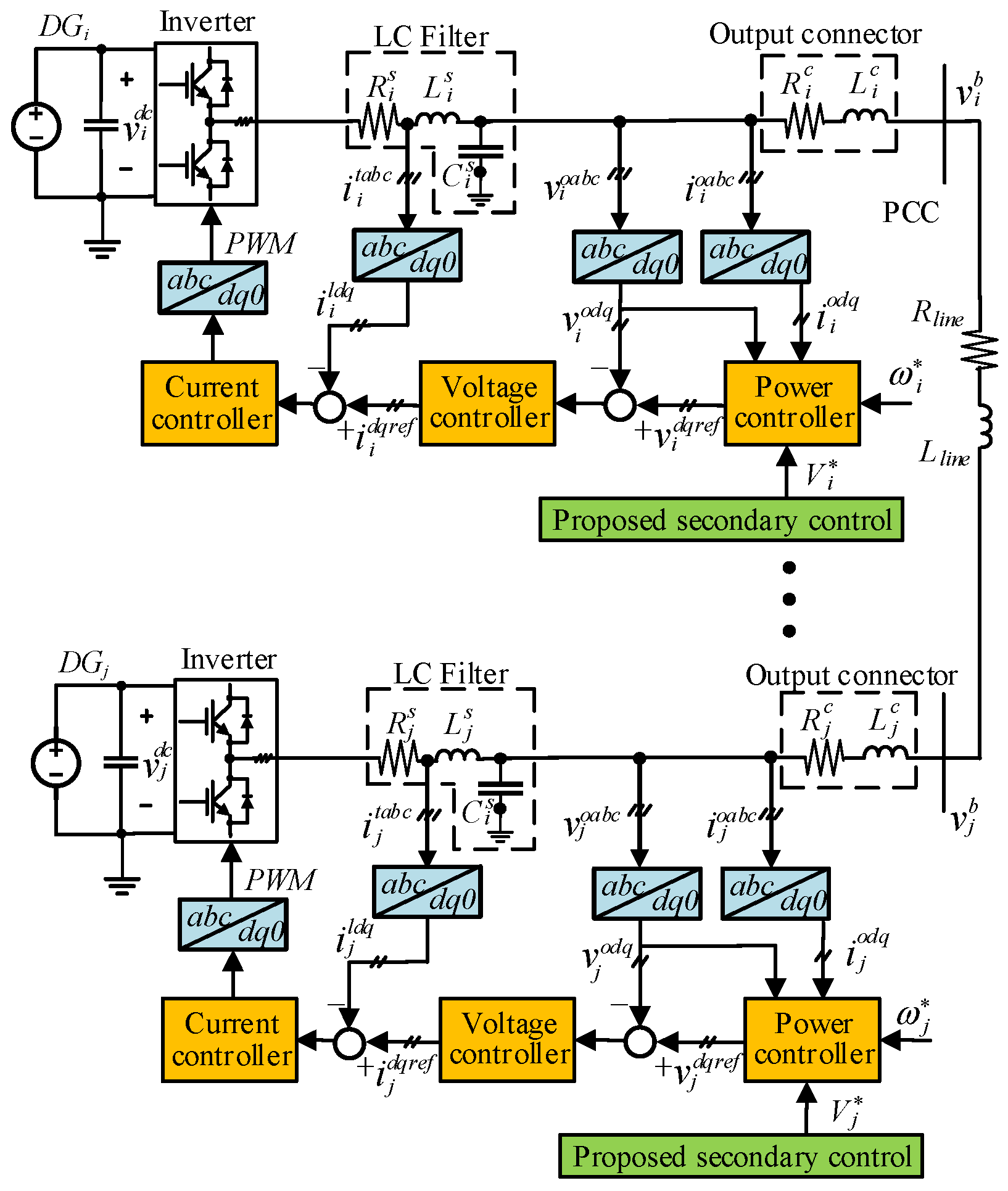
This paper aims to address the voltage restoration and reactive power sharing problem in the secondary control level of an islanded microgrid with multiple inverter-based DGs. In general, the secondary control strategies for microgrids are categorized into three types: centralized [
6], distributed [
7], and decentralized [
8]. Microgrids are characterized by small electrical distances between DGs, lack of static compensation devices, and line impedance mismatch [
9], which makes the primary droop control fail to achieve accurate reactive power sharing among the DGs. Such a failure in turn possibly causes DGs overloads and damages the stability of the whole system. The authors of [
10,
11] proposed centralized control architectures for voltage restoration and reactive power sharing, in which each DG demands to communicate with a central controller. The centralized manner requires a complicated two-way communication network and any single point failure may cause serious instability of the entire system. For enhancing the scalability and flexibility, a multiagent system (MAS)-based distributed secondary control scheme using only local neighbors’ information is more desirable in microgrids. Cooperative secondary controllers by using a multiagent pinning consensus [
12], finite-time consensus [
13], and distributed averaging proportional integral (DAPI) [
14] have been deliberately designed for voltage or/and powering sharing control. Since the objective of most studies is to synchronize the voltages of DGs to nominal values, accurate reactive powering sharing among DGs is impossible. And most recent work does not consider the influence on the consensus algorithm of the potential malicious attacks induced by the communication network.
In the MAS-based distributed cooperative control scheme, each DG is considered as an agent that exchanges information with its neighbors through communication networks. Conventional continuous-signal-based communication requires real-time data transmissions between DGs. The continuous-time-based control method can hardly be realized due to the constraints of channel bandwidth and computing resources in practical engineering. Moreover, the sampled-data communication mechanism requires higher communication rates to satisfy the worst possible extreme situations, which would increase the burden of networks and cause time delay or packet loss. According to [
15], the event-triggered communication mechanism was proposed for microgrid secondary control to realize need-based data exchanges while meeting the performance requirements. A similar event-triggered control strategy was also applied in [
16]. However, it is noteworthy that event-triggered communication requires continuous monitoring of the state variables of agents, which would place a heavy computation burden on each DG local controller. Moreover, the objectives of the abovementioned event-triggered method are only to synchronize the output voltages of DGs to their nominal values or realize reactive power sharing without considering voltage restoration. To the author’s knowledge, the secondary control for average voltage restoration while maintaining reactive powering sharing using an appropriate event-triggered communication mechanism has not been discussed.
While the communication network facilitates distributed control strategies, it leads to the vulnerability of microgrids to malicious cyber attacks. In general, cyber attacks can be categorized into: denial-of-service (DoS) attacks and deception attacks. Deception attack, such as false data attack (FDIA) and replay attack, is to compromise the integrity of measurements or transmitted data packets, while DoS attack is to block legitimate data transmissions or interfere with receptions. In the research field of the DoS attacks’ detection mechanism, a collaborative real-time intrusion detection approach based on blockchain combined with SVM was developed in [
17]. In [
18], a signal temporal logic (STL)-based attack detection strategy was presented that can detect both FDIA and DoS attacks for microgrids. In the aspect of the DoS attack-resilient secondary control scheme, a software-defined microgrid control architecture was designed for resilience against DoS attacks in [
19]. A finite-time control strategy was proposed for a battery energy storage system under DoS attacks in [
20], but a communication recovery mechanism must be added to ensure the robustness of the method. In [
21], an event-triggered control strategy was proposed for voltage restoration of a microgrid subject to DoS attacks, but this method requires the system to meet exponential stability conditions, which limits its application range. In [
22], the intermittent DoS attacks were modeled as time delay and the impact of attacks on microgrid stability was analyzed, but no mitigation measures were proposed. In [
23], a resilient control scheme with the power talk mechanism was established which can detect DoS attacks through adjusting droop coefficients, but this method is sensitive to load changes. Due to the fact that no communication networks are required, a decentralized control scheme has the natural advantages of resisting cyber attacks. However, it is noteworthy that the secondary control with no communication networks is still an open research field and the main challenges are related to modeling, stability, and robustness [
24]. Since distributed structures have been widely studied and applied in engineering, it is of significance to propose a distributed resilient secondary control strategy to ensure voltage restoration and reactive power sharing under DoS attacks, which motivate our research.
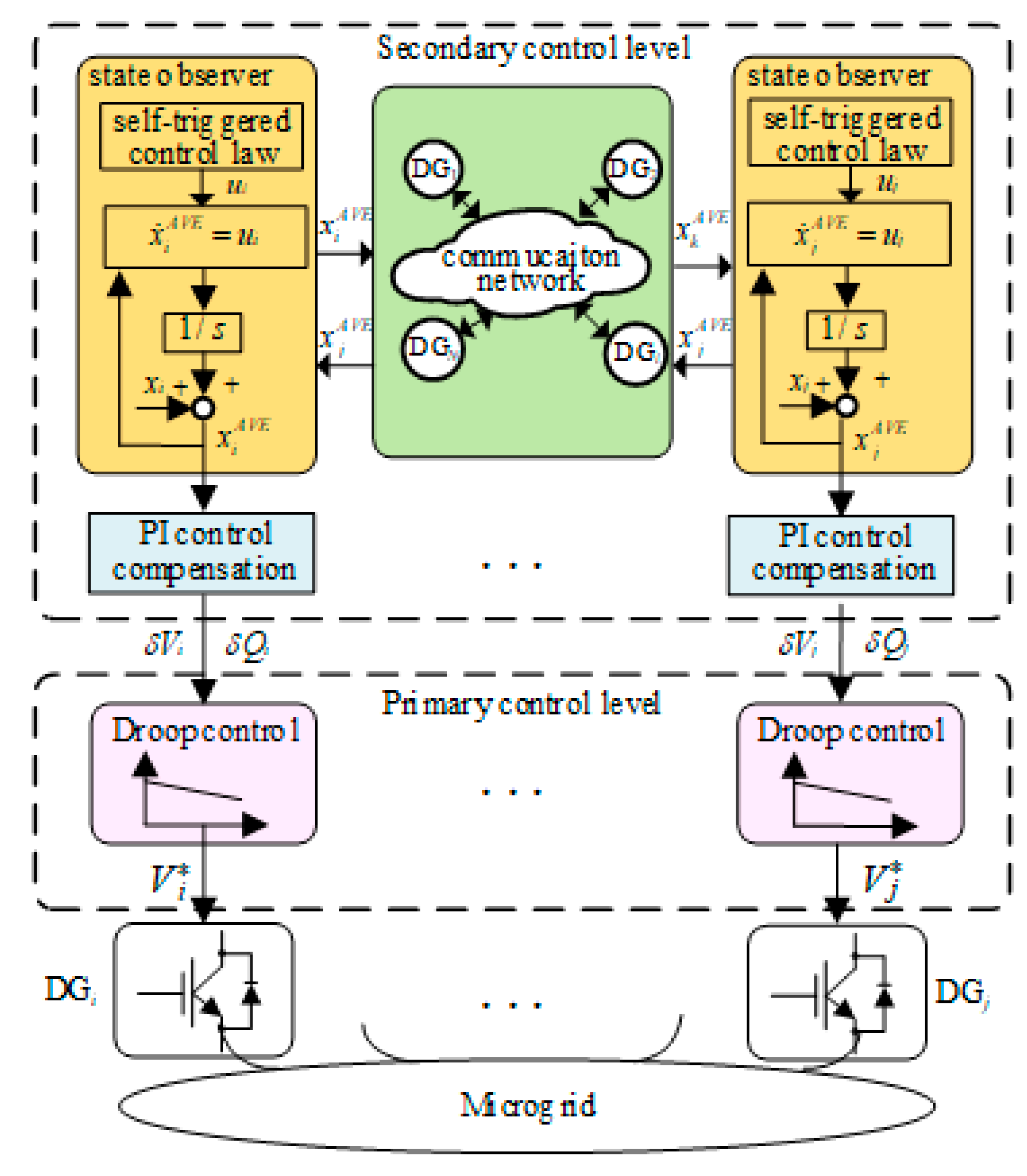
In this paper, we focus on the distributed secondary control for average voltage restoration and reactive power sharing of an islanded microgrid by taking into account the communication burden and the impact of DoS attacks. The communication mechanism of a distributed secondary controller is changed from the traditional periodic sampling manner to a new self-triggered manner in which continuous monitoring of neighboring DG’s state can be avoided. Considering DoS attacks prevent the information transmission between DGs, an acknowledgment (ACK)-based monitoring mechanism is developed to ensure successful communications once the sleep period of attack is detected. The main contributions of this paper are summarized as follows: (1) A two-layer secondary control scheme is proposed, where a state observer with ternary self-triggered control law is constructed and average voltages of DGs can be restored to their nominal values while maintaining accurate reactive power sharing. The communication burden between agents by our method can be highly reduced than that of the periodic way. (2) A class of time-sequence-based aperiodic DoS attacks is considered, an ACK-based monitoring mechanism is introduced to check whether the sleep period of DoS attacks has arrived. A new triggering condition is developed according to the monitoring results which ensures successful information exchanges when the sleep period is detected. (3) The stability of the proposed control strategy is proved using the Lyapunov method. The consensus of agents can be reached regardless of the frequency of DoS attacks which guarantees the achievement of secondary control objectives. Finally, simulation and experimental results are presented to verify the effectiveness and resilience of the proposed control scheme.
3. Self-Triggered Control for Islanded Microgrids under DoS Attacks
In this section, we design an improved ternary self-triggered control law to maintain the voltage restoration and reactive power sharing for microgrids under DoS cyber attacks. First, the descriptions of communication topology and DoS attacks are presented. Then, an improved ternary self-triggered control law is established with an ACK-based monitoring mechanism and theoretical analysis is conducted to prove the convergence of the proposed control algorithm.
3.1. Communication Topology
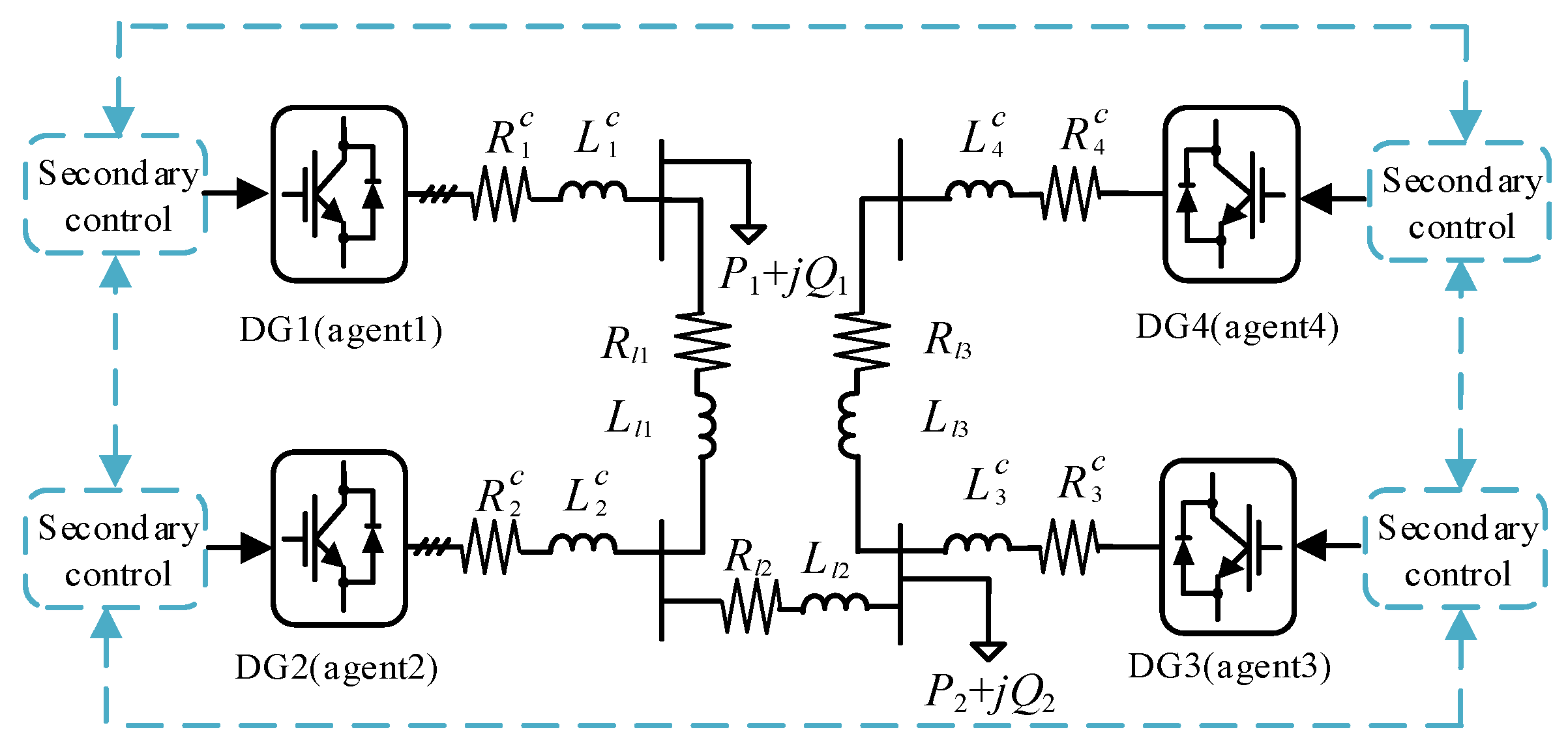
To facilitate the MAS-based distributed secondary controller, each DG in the microgrid is considered as an agent that communicates with its neighbors via the communication network. The communication topology is described as an undirected graph , where denotes the set of agent nodes corresponding to DGs, and is the set of edges corresponding to the communication links. Node j is a neighbor of node i if there is an edge defined as . is the adjacency matrix, where for all i, and if , otherwise,. is defined as the set of node i’s neighbors, and the degree of node i can be expressed as . A path is defined as a connected edge in a graph, and the graph is connected if there is a path between any two nodes.
Remark 1: For the brevity of analysis, it is supposed that the transmissions of the estimated average information of voltage and reactive power use the common communication topology. However, different topologies may be used for information exchanges in a practical microgrid system. It is worth pointing out that the proposed self-triggered control law can be extended to accommodate the case of different communication topologies as well.
3.2. Model of DoS Attacks
In cyber physical environments, the adversaries can conduct DoS attacks by jamming communication channels, disabling sending devices, and distorting communication protocols to make parts or all components of the control system inaccessible, which would cause data loss and control failure. In general, DoS attacks can be categorized into node-based attacks and link-based attacks [
20]. Node-based attacks can prevent a node from sending its state to its neighbors, while link-based attacks block information exchange between two neighboring nodes. The MAS-based secondary control scheme of microgrid requires the communication topology to maintain connectivity. DoS attacks may destroy communication connections among neighboring DGs and even ruin the stability and convergence of the MAS-based secondary control strategy.
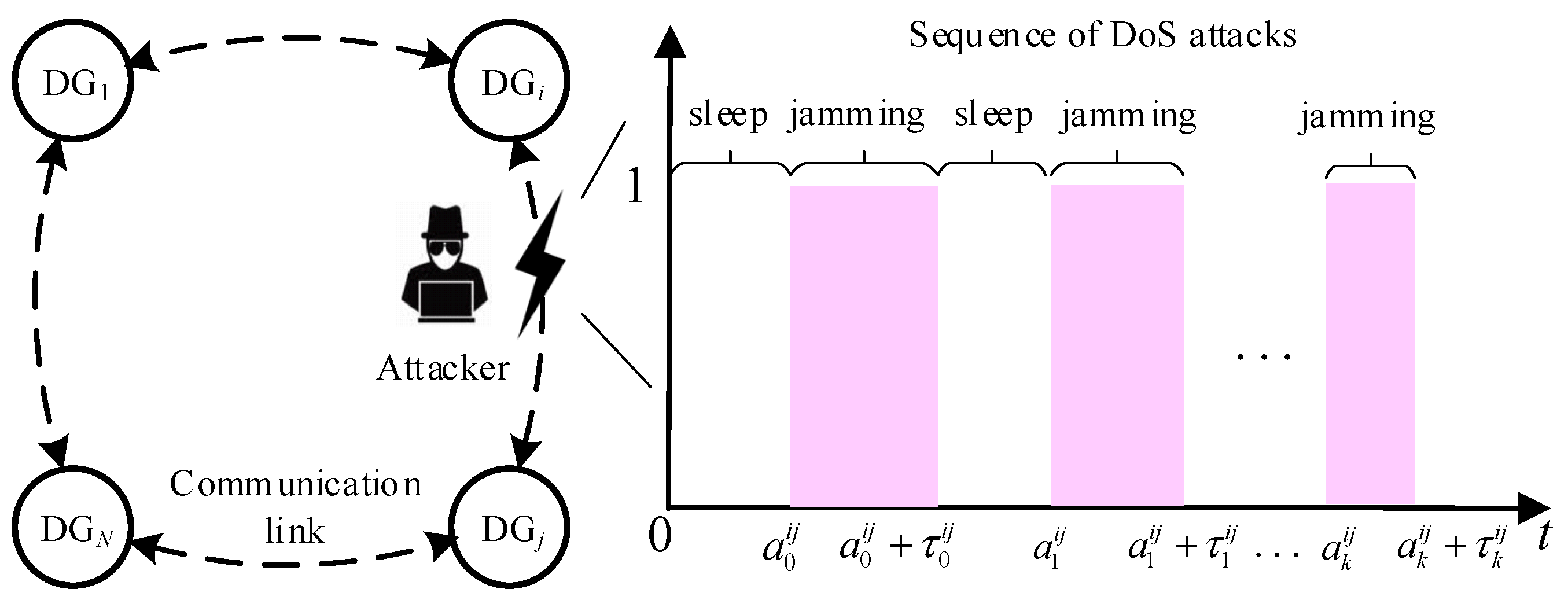
Figure 3 shows the communication network of the microgrid system under DoS attacks.
As illustrated in
Figure 3, the adversaries launch DoS attacks on the communication link
to block the data transmission between
and
. Since the adversaries with limited resources cannot continuously jam the channels for a long time, the sequence of DoS attacks repeats the cycles of jamming and sleeping. The set
and the set
are defined to represent the starting time instants and durations of the DoS attacks on the communication link
, in which
and
is satisfied. The
kth attack interval can be expressed as
, during which the information sharing is prevented between agents
i and
j. In the time interval
, the total duration of the attacks
on the communication link
can be expressed as
where the scalar
and
. Note that Equation (8) implies that
,
can be considered as the upper bound on the ratio of the total duration of DoS attacks in a long time interval. Since the jamming period cannot span the entire time, the longest duration for jamming period cannot be larger than
, and
can be used to model the attacker’s capability for continuous jamming.
Remark 2: In a wireless communication network, the adversaries require energy for sending radio inference to block data transmissions. Due to resources and energy constraints, the adversaries cannot constantly jam the communication channels. Our DoS attack model can capture different scenarios, such as reactive, random, and periodic jamming attacks [29]. In a wired communication network, DoS attacks can be conducted with a flood of internet traffic to the targeted devices. The adversaries may keep the number of attacks small to make them less detectable [30]. Thus, DoS attacks cannot span the entire time and repeat the cycles of jamming and sleeping. Note that node-based DoS attacks can be considered as some or all of the links connected to the node subject to attacks. Our DoS attacks model can capture a more general scenario, in which communication links can be attacked independently. 3.3. Improved Ternary Self-Triggered Control Law Under DoS Attacks
To achieve the agent’s consensus while reducing communication requirements in the secondary control level, we improve the ternary control approach previously applied in [
31,
32]. The ternary variables of agent
i is defined as
, where
is the state variable,
is the local control input, and
is the clock variable. The piecewise-constant control input
belongs to the set
, where Υ is a positive scalar. The evolution of the ternary variables of agent
i can be described as
where
denotes the average estimate of voltage and reactive power in
.
denotes the control action caused by the relative state difference between neighboring agents
i and
j, and the control action is fully distributed since the evolution of
only depends on
with
.
denotes the clock variable on the communication link
. When
reaches 0, agent
i asks for the state of agent
j, then updates the control input
and resets the value of
. Since the following update time is determined by
and precomputed at the update time, the system described as Equation (9) can realize self-triggered communication [
31].
The detection function for DoS attacks on the communication link is defined as , and an assumption is proposed as follows.
Assumption 1: The detection function indicates whether the communication link is in the presence of DoS attacks and only changes its value at the triggering time instants. Specifically, at triggering time instants, if an agent attempts to communicate with its neighbors and cannot receive the information, it implies that the communication link is suffering from the DoS attacks. Then, the detection function changes value from 1 to 0, denoted as . When the attack shifts to a sleep period, an ACK-based monitoring mechanism is able to detect that the communication link returns to normal and there will be a successful information exchange between agents immediately. Then, the detection function changes value from 0 to 1, denoted as .
ACK-based monitoring mechanism: At triggering time instants, if the communication attempts are denied by the attack, an ACK-based monitoring mechanism is activated to check whether the attack shifts to a sleep period. Specifically, when the communication attempt of
is blocked due to the jamming period of DoS attack,
continuously sends test data packets to
. When the attack shifts to a sleep period,
will receive the test packets and send an acknowledgment (ACK) message back to
. It is assumed that the ACK message can be transmitted successfully and the transmission time is negligible, the proposed mechanism can detect the sleep period immediately. Such implementation is practical and also applied in the cybersecurity framework for power grids [
33]. The ACK-based monitoring mechanism requires no extra calculation process. Thus, the computation burden of the microcontroller is not increased and the real-time performance of the control scheme is not affected. From the above analysis, it can be seen that Assumption 1 is reasonable and feasible in practical engineering.
Remark 3: In the secondary control framework of microgrids, communication networks can be implemented by means of wired technologies such as RS-232, ModBus, and Power-Line Communication, or wireless technologies such as Wi-Fi and ZigBee. For a successful information exchange between agents, the protocols for data transmission such as TCP/IP and IEC 61850 are also needed [34]. Assumption 1 does not require the agents to detect the occurrence of the attack in real-time, but it needs agents to know the communication failure at triggering time instant is caused by DoS attacks. This is a general assumption in the attack-resilient control scheme [20,21,32]. In wireless communication networks, statistical metrics such as signal strength consistency, packet send ratio (PSR), and packet delivery ratios (PDR) can be adopted to detect radio interference induced DoS attacks [29]. In wired communication networks, computationally low-cost machine learning methods, such as SVM and neural networks, can detect DoS attacks according to the abnormal traffic features with high accuracy [30,35]. The abovementioned detection algorithms are not difficult to apply in microgrid systems, since the local microcontroller of DGs has powerful computing capacity. The triggering conditions are defined as
and
, and can be expressed as follows
where
indicates that when clock variable
reaches 0, there will be a communication attempt between neighboring agents
i and
j;
is the ACK-based mechanism induced triggering condition and indicates that when the sleep period of DoS attacks is detected, agents
i and agent
j can successfully exchange information as well.
Define
as the relative state difference between the agents
i and
j, and the function
can be expressed as
where
denotes a sign function while the parameter
determines the final consensus region of the algorithm.
According to the detection function and triggering conditions, the update laws of the local control input
and the clock variable
can be given by
where
Equations (12)–(14) suggest that the control input
and the clock variable
is updated synchronously according to the relative state difference
when the communication link
works in normal condition and
reaches 0, or when the sleep period of attacks is detected by the ACK-based monitoring mechanism. When
reaches 0 and the communication attempts are denied by the jamming period of attack, the control signal
is set to 0. According to the above analysis, the successful communication time instants between agents
i and
j are discrete, and can be represented as
where
and
are the
kth and (
k+1)th successful communication time instants, respectively. Additionally,
denotes the latest detection that the DoS attacks shifts to a sleep period.
For the sake of clarity, our improved ternary self-triggered control law is summarized in Algorithm 1 and illustrated as below.
| Algorithm 1 Improved ternary self-triggered control law |
| Initialization: For agent
, set clock variable , control input . |
| fori = 1 to N do |
| for j = 1 to Ni do |
| while do |
| ; |
| end while |
| if then |
| update ; |
| update ; |
| end if |
| if then |
| update ; |
| update ; |
| end if |
| if then |
| DGi constantly sends test data packets to DGj; |
| When DGi receives the ACK message from DGj, update ; |
| end if |
| end for |
| end for |
Remark 4: It is worth noting that when is plugged out, the neighbors of are unable to receive its state information either. In order to accommodate for the topology changes and plug-and-play operation, each DG is given a unique ID and equipped with a local information table to store the connectivity information of the communication network. This table can be represented by a “0-1” matrix, where “0” indicates the corresponding communication link is absent and “1” indicates the corresponding communication link is present. When is plugged out, it will send a message to its neighboring (), and will delete the corresponding ID and update the local information table as well as its node degree . When a new DG (named ) is plugged into the microgrid, it will be given a new ID and try to find the nearest neighbors with the flooding-based graph discovery algorithm [36]. The neighbors of will update their local information table and node degrees, and then interact with to implement the secondary control scheme proposed in this paper. 3.4. Stability Analysis
The convergence of the proposed improved ternary self-triggered control law under DoS attacks is analyzed in this subsection.
Theorem 1. For the system described as Equation (9), if topology G is undirected and connected, and DoS attack sequence that satisfies Equation (8),
converges in finite-time to a point
regardless the frequency of DoS attacks, for all .
Proof of Theorem 1. The Lyapunov function
can be defined as
where
. Note that
and we consider the evolution of
.
Let
denotes the latest triggering time instant. Firstly, we prove that there must exist a finite-time
such that, for every
and every
l with
, the control input
is set equal to 0 and stops to update. Using Equations (12)–(14), the derivative of
V(
t) can be expressed as
where
represents the summation condition.
means that the agents
i and
j are not
-close while
means that the communication is allowed on link
at the triggering time instant
. This summation condition follows from the fact that for any
, if
or
, we have
for
. In other cases,
is not equal to 0. □
Using Equation (14), it can be observed that for
, if
, then we have
Similarly, if
, then we have
The above inequalities imply that if
, then
preserves the sign during continuous evolution, and consequently we have
. According to this fact, the following inequality can be obtained
Since Υ is a positive scalar, it can be concluded that will decrease under the summation condition. However, there must exist a finite-time such that for every and every l with , or holds true. This is because otherwise, would become negative which is in contradiction with the positive semi definiteness of Lyapunov function. From Equations (12)–(14), we can conclude that in both the cases and , the control input is set equal to 0 and stops to update.
Then,
caused by the persistence of the jamming period can be excluded. According to the model of DoS attacks, the adversaries cannot permanently destroy the transmission capacity of communication links. This means that there must exist a successful triggering time instant
, which can be ensured by the proposed ACK-based monitoring mechanism. Thus,
caused by the persistence of the jamming period can be excluded. It can be concluded that for all
and
, there must exist
. Since each pair of neighboring agents differs by at most
and the graph
G is undirected and connected, the state variable
can converge to a point
belonging to the set defined as follows
where
N is the total number of agents. By choosing the appropriate value of
, the range of the final consensus region can be small enough to improve the control accuracy of the proposed algorithm.
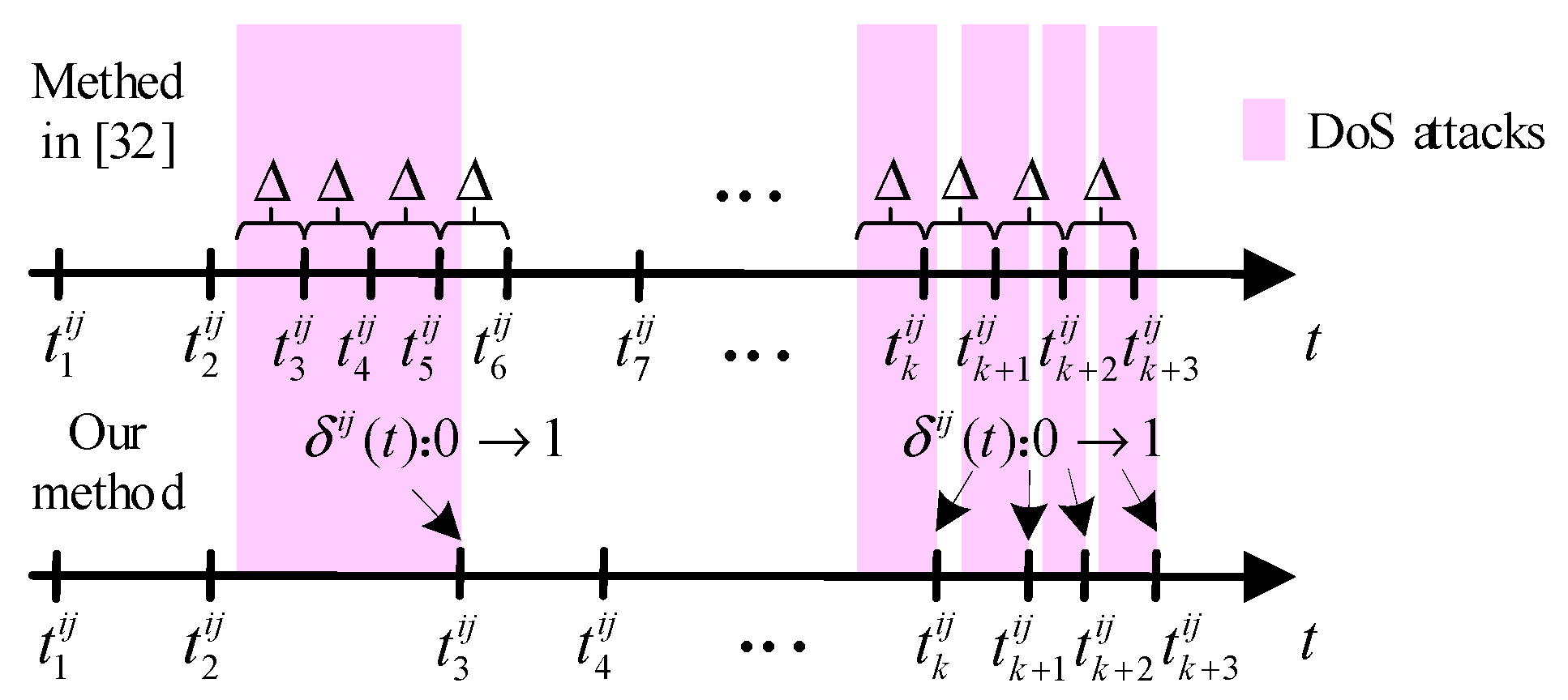
Figure 4 shows the comparison of our algorithm and the method applied in [
32].
Remark 5: Due to the distributed property, the proposed self-triggered control scheme is reliable and cost-efficient, and suitable for scalability and flexibility of microgrids. Continuous monitoring of the state variable is not required in our method, and each linked pair of agents can exchange information independently, which improves computation efficiency while reducing communication requirements. Compared with the method used in [32], our algorithm allows the agents to achieve consensus regardless of the frequency of DoS attacks. As illustrated in Figure 4, the minimal interval between any consecutive communication attempts for agents i and j can be represented as Δ in [32]. However, this method becomes invalid in the case that the frequency of DoS attacks is larger than , because all information exchanges are blocked on communication link . By introducing the ACK-based monitoring mechanism, a new triggering condition is proposed to ensure the successful data transmissions when the attack shifts to a sleep period. Thus, even under high-frequency DoS attacks, the agent’s consensus can still be achieved by our algorithm. 5. Experimental Verification
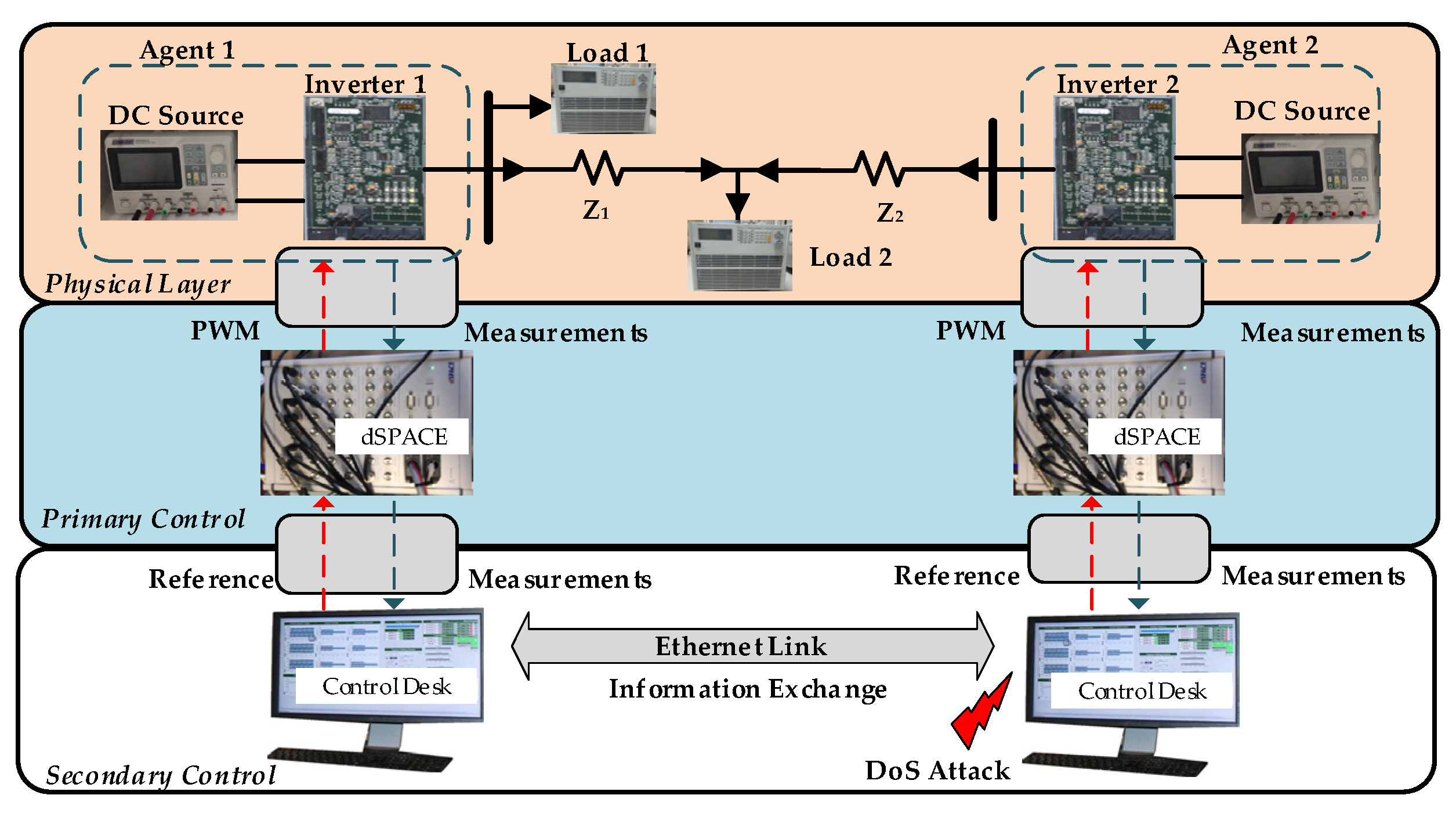
The proposed resilient control scheme has been experimentally validated in an islanded microgrid testbed with two DG units, as illustrated in
Figure 16. The DG1 is included in Setup 1 and DG2 is included in Setup 2. The energy source in the DG unit is represented by a DC voltage source. The inverter is equipped in each setup working as the interfacing power converter between the DG and the loads. In the primary control level, each setup is equipped with a dSPACE Microlabbox board. The primary control loop which is developed using MATLAB/Simulink toolbox is compiled into dSPACE for execution. In the secondary control level, each setup is equipped with a PC platform which runs the dSPACE Control Desk program to manage the dSPACE controller. The PC platform collects the voltage and reactive power information from its local dSPACE and then transmits this information to the other PC using the TCP/IP protocol-based Ethernet links. Using the local and neighboring information, the proposed self-triggered control scheme can be realized on each PC platform to adjust the compensation terms in Equation (7) for each agent to meet the control objective of average voltage restoration and reactive power sharing. It is worth mentioning that the experimental implementation could be simplified by using only one dSPACE and only one PC to control all of the two DGs. However, such implementation conflicts the distributed nature of the proposed control scheme. The experimental testbed parameters are provided in
Appendix B.
Since the DoS attack distorts the information exchanges between agents, such an attack is emulated through the on/off commands to the communication port of the PC platform. When the attacker starts to block the information transmission, the communication port of the PC platform in Setup 2 is turned off to emulate such an attack scenario. The real-time detection of such communication failure is not required. At the following triggering time instant, Agent 1 cannot receive the information from Agent 2 which implies that the communication link is in the presence of an attack. Then, the ACK-based monitoring mechanism is activated by Agent 1 to check whether the attack activity shifts to a sleep period. In order to emulate the sleep period of attack, the communication port of Agent 2 is turned on at a certain time instant. Agent 2 can receive the test packets and then send an ACK message to Agent 1. The two agents are able to exchange information and update according to Equations (12)–(14). The experimental results of the proposed control scheme are illustrated in
Figure 17 and
Figure 18.
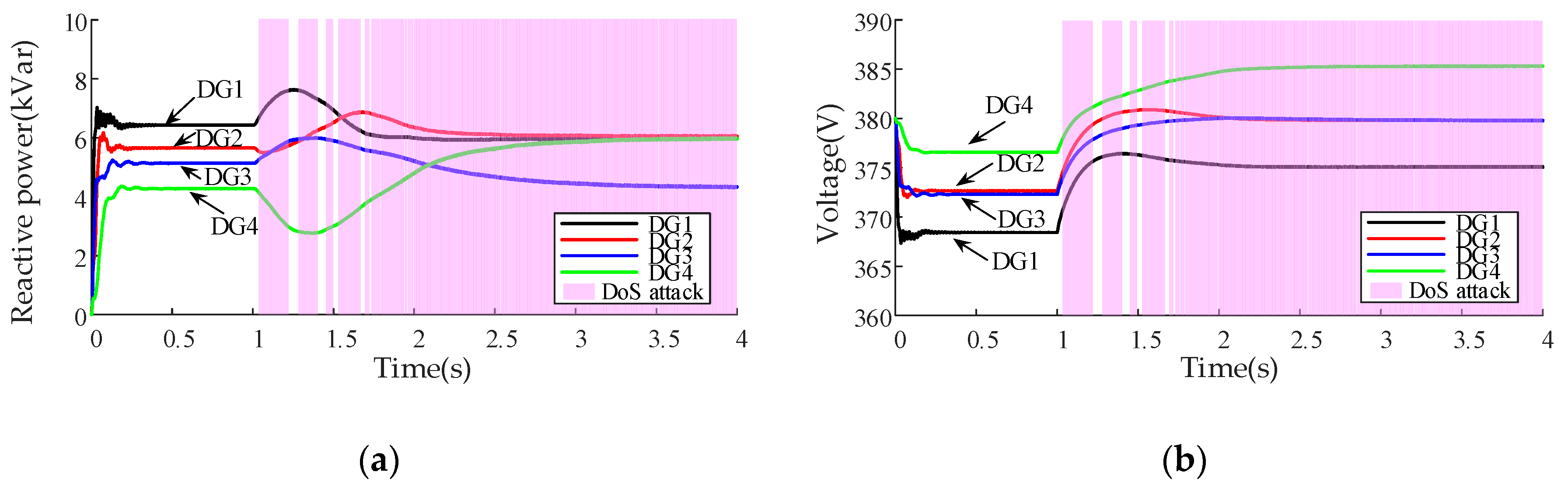
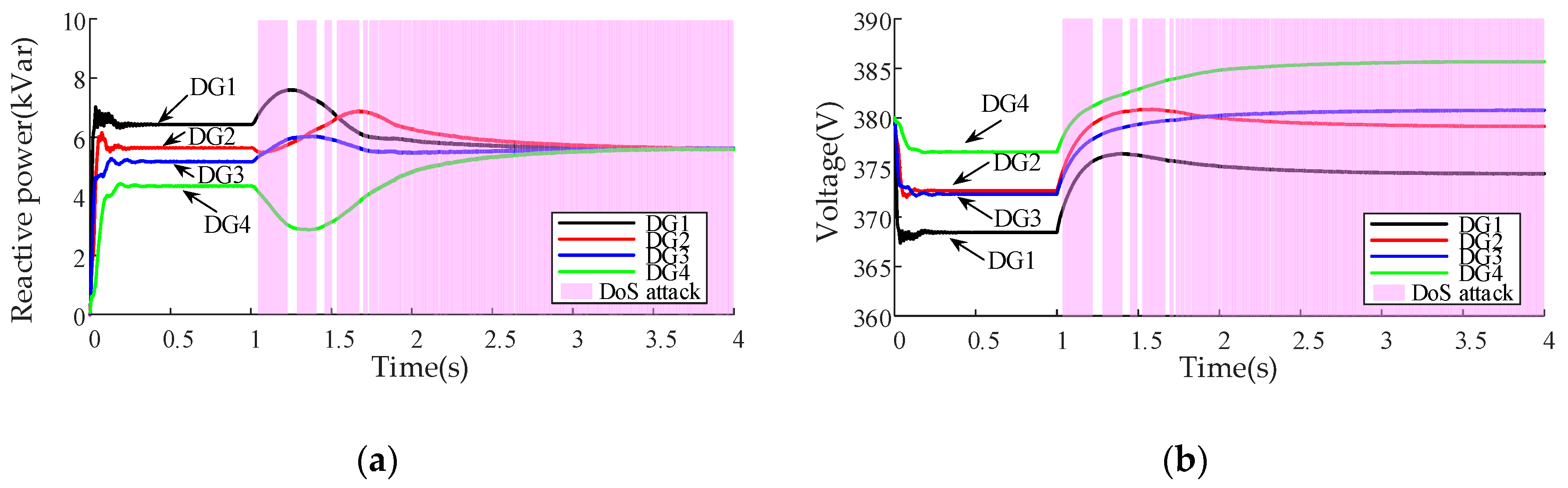
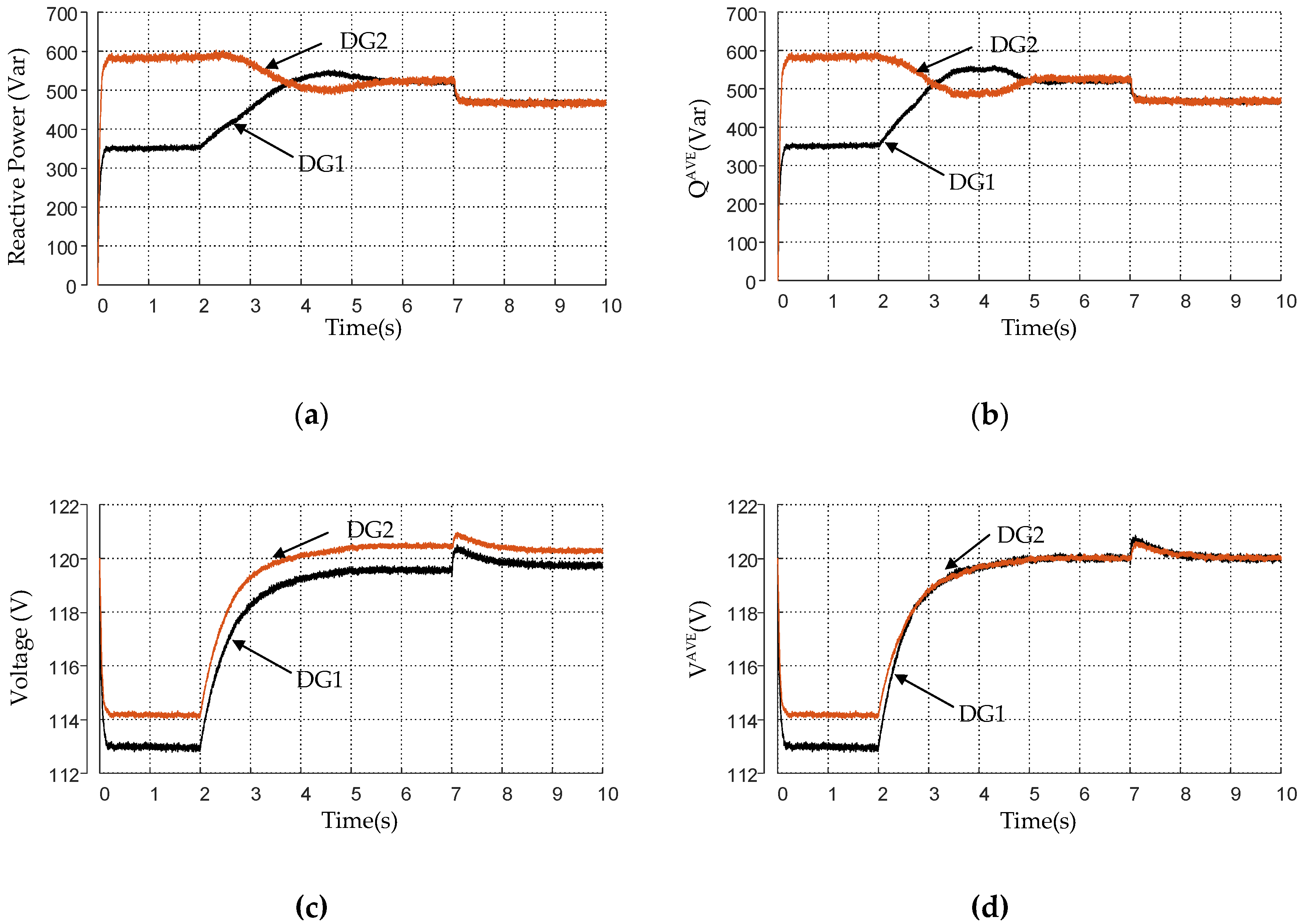
In the experiment, the jamming intervals of DoS attacks are set as
{ [2.1 s, 2.2 s], [2.4 s, 2.6 s], [3.2 s, 3.5 s], [4.1 s, 4.3 s], [4.9 s, 5.0 s], [5.2 s, 5.4 s], [6.1 s, 6.4 s], [6.9 s, 7.0 s] }. During the jamming intervals, the communication attempts of the two agents are denied by the attack. As can be seen in
Figure 17, when the secondary control is applied at
t = 2 s, the proposed self-triggered control scheme is able to discover the average information of voltage and reactive power in the presence of DoS attacks. The average voltage of all DGs can gradually restore to the nominal value. Meanwhile, accurate reactive power sharing can be achieved in steady-state. When load1 is decreased by the amount of 100Var at
t = 7 s, voltage restoration and reactive power sharing can still be guaranteed after a transient process.
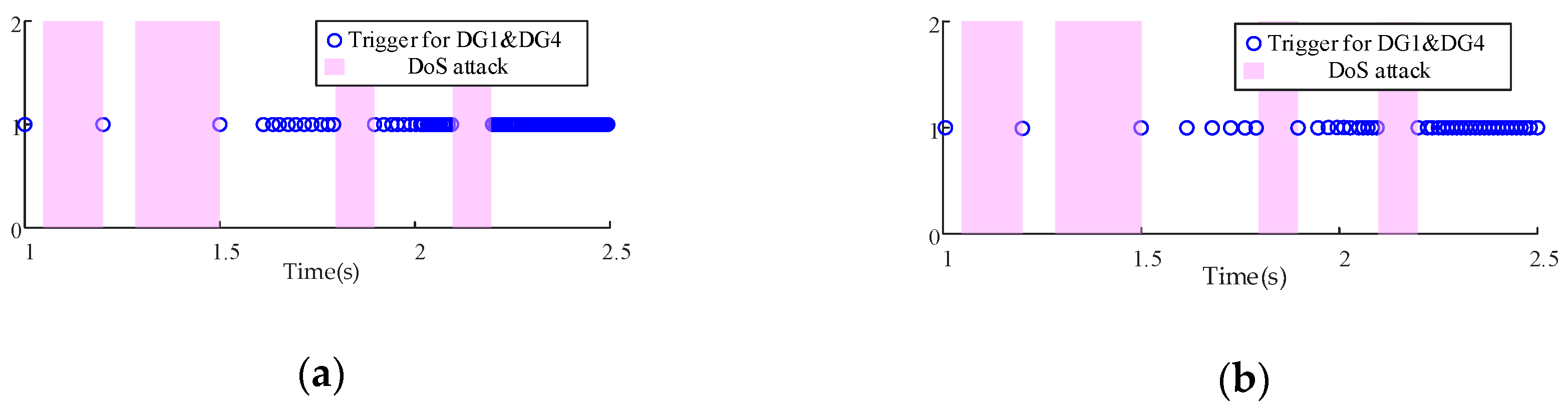
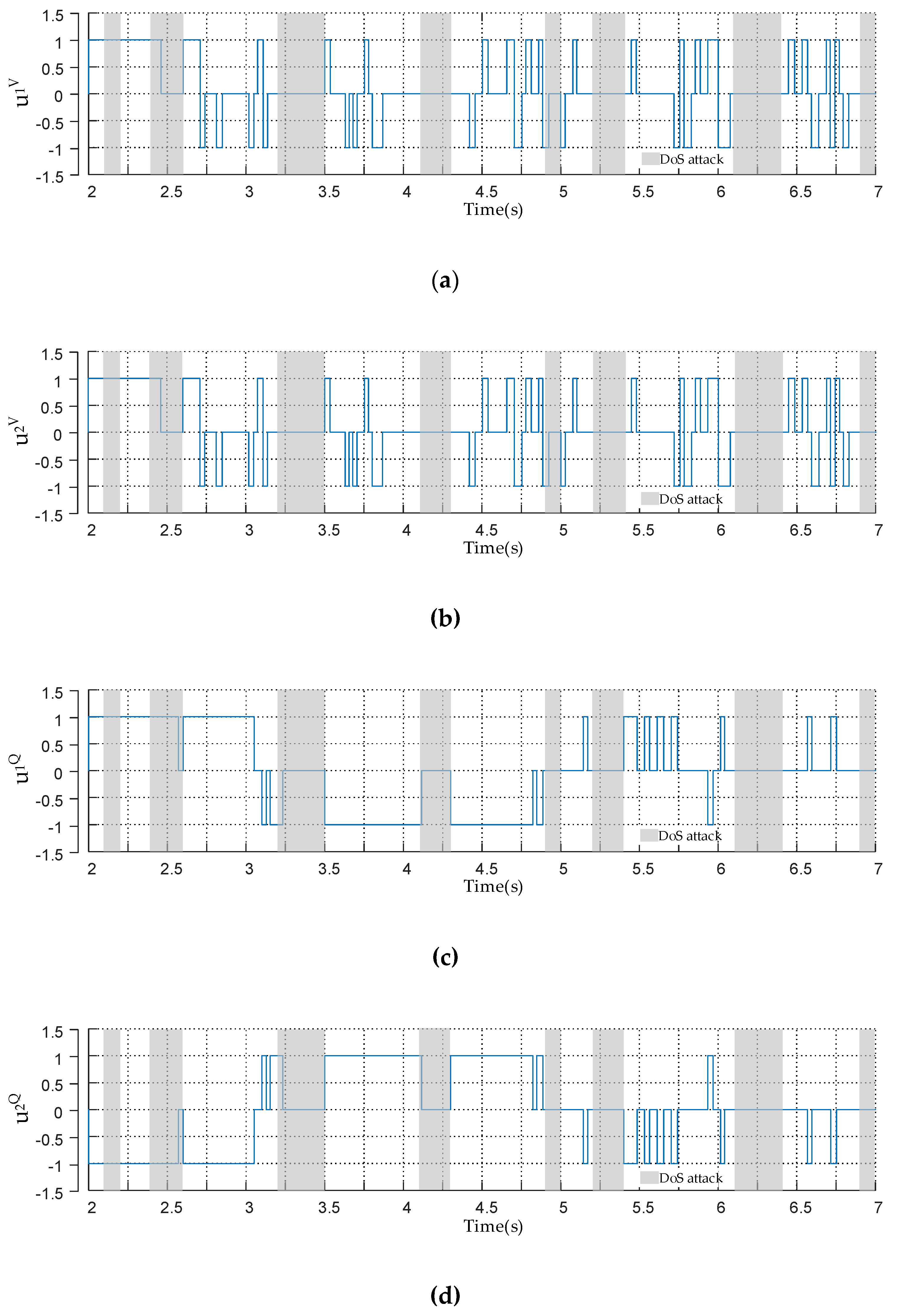
Figure 18 shows that the control inputs only update at the triggering time instants and the proposed ACK-based mechanism is able to successfully detect that the DoS attack shifts to a sleep period. Taking the control input
as an example, for
,
is not affected by the attack since there is no triggering time instant during this jamming interval. For
, although the attacker starts to block the communication link at
t = 2.4 s,
changes to 0 at the triggering time instant
t = 2.46 s due to the unsuccessful communication attempt between DG1 and DG2. Then, the ACK-based mechanism is activated to check whether the attack shifts to a sleep period. When the attack is cleared at
t = 2.6 s, the ACK-based mechanism successfully detects that the communication link returns to normal. Then, DG1 receives the information from DG2 and
updates according to the relative state difference between DG1 and DG2 immediately. It can be concluded that the proposed control scheme ensures the immediate update of the control signals when the attack shifts to a sleep period. Thus, the control objectives of voltage restoration and reactive power sharing can still be achieved even under DoS attacks.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}