Convolutional Neural Network-Based Gear Type Identification from Automatic Identification System Trajectory Data



Abstract
:1. Introduction
2. Related Work
3. Fishing Gear Type Identification from Automatic Identification System Trajectory Data
3.1. Fishing Gear Type Identification
3.2. Automatic Identification System and Its Messages
3.3. Preprocessing of Trajectories from AIS Data
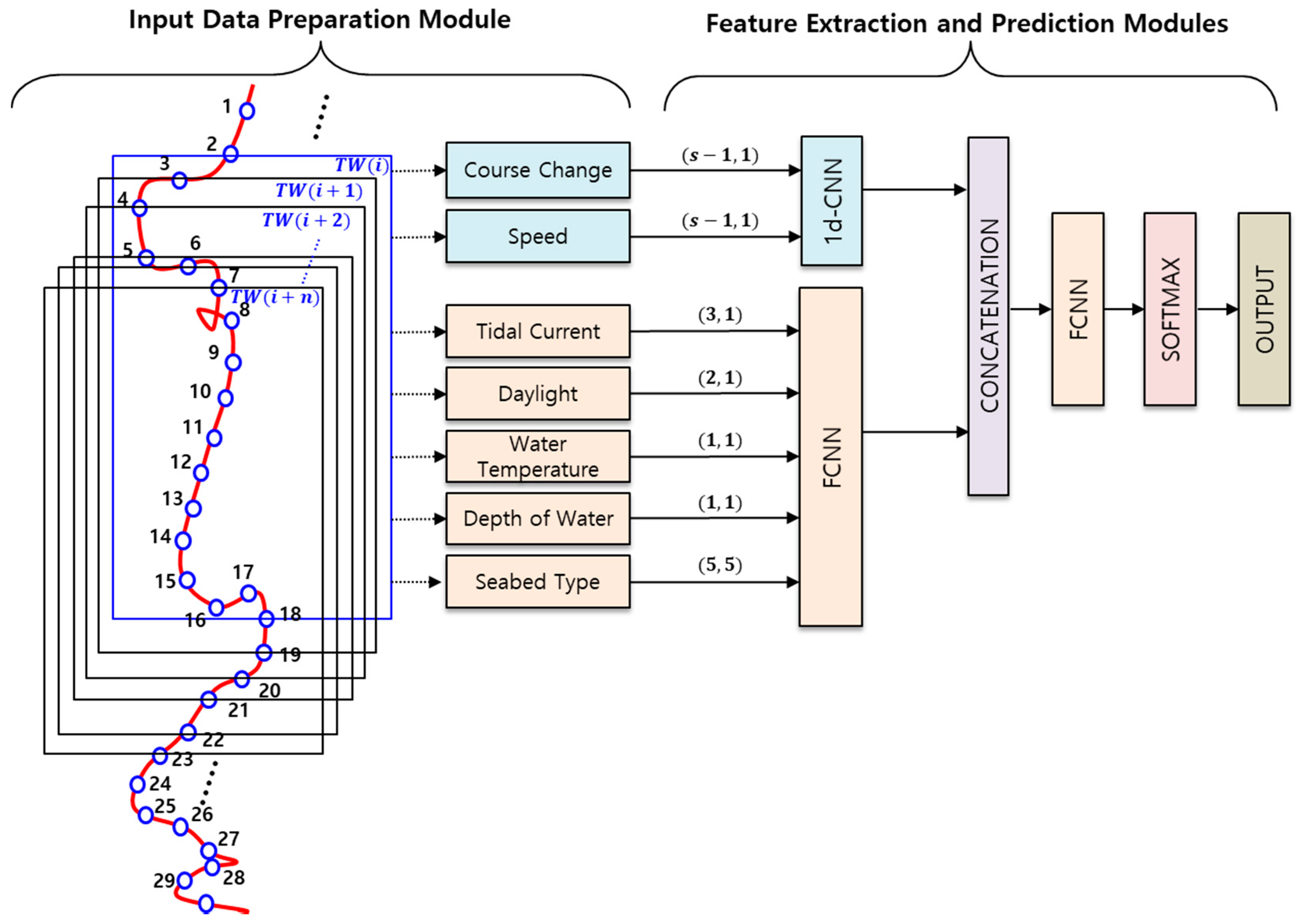
3.4. The Proposed Deep Neural Network Model for Fishing Gear Type Identification
3.4.1. Input Data Preparation Module
3.4.2. Feature Extraction and Prediction Modules
4. Experiments
4.1. Data Preparation
4.2. Labeling the Fishing Gear Type
4.3. Taining and Performance Evaluation of the Proposed Model
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fagan, B. Fish on Friday: Feasting, Fasting, and the Discovery of the New World; Basic Books: New York, NY, USA, 2007. [Google Scholar]
- Cochrane, K.; De Young, C.; Soto, D.; Bahri, T. Climate Change Implications for Fisheries and Aquaculture; FAO Fisheries and aquaculture technical paper 530; FAO: Rome, Italy, 2009; 212p. [Google Scholar]
- Polacheck, T. Assessment of IUU fishing for southern bluefin tuna. Mar. Policy 2002, 36, 1150–1165. [Google Scholar] [CrossRef]
- Botsford, L.W.; Castilla, J.C.; Peterson, C.H. The management of fisheries and marine ecosystems. Science 1997, 277, 509–515. [Google Scholar] [CrossRef] [Green Version]
- Pramod, G.; Nakamura, K.; Pitcher, T.J.; Delagran, L. Estimates of illegal and unreported fish in seafood imports to the USA. Mar. Policy 2014, 48, 102–113. [Google Scholar] [CrossRef]
- Marzuki, M.I.; Gaspar, P.; Garello, R.; Kerbaol, V.; Fablet, R. Fishing gear identification from vessel-monitoring-system-based fishing vessel trajectories. IEEE J. Ocean. Eng. 2017, 43, 689–699. [Google Scholar] [CrossRef]
- Um, S.H.; Lee, W.S.; Beak, Y.S.; Lee, K.H. A Study on the Introduction of a New Fishing Vessel Registration System; Korea Maritime Institute: Busan, Korea, 2019; pp. 9–28. [Google Scholar]
- Sundström, A. Covenants with broken swords: Corruption and law enforcement in governance of the commons. Glob. Environ. Change 2015, 31, 253–262. [Google Scholar] [CrossRef] [Green Version]
- Sundström, A. Corruption in the commons: Whfy bribery hampers enforcement of environmental regulations in South African fisheries. Int. J. Commons 2013, 7, 454–472. [Google Scholar] [CrossRef]
- Davie, S.; Lordan, C. Using a Multivariate Approach to Define Irish Métiers in the Irish Sea. Ir. Fish. Investig. 2009, 21, 1–49. [Google Scholar]
- Deng, R.; Dichmont, C.; Milton, D.; Haywood, M.; Vance, D.; Hall, N.; Die, D. Can vessel monitoring system data also be used to study trawling intensity and population depletion? The example of Australia’s northern prawn fishery. Can. J. Fish. Aquat. Sci. 2005, 62, 611–622. [Google Scholar] [CrossRef]
- Mills, C.M.; Townsend, S.E.; Jennings, S.; Eastwood, P.D.; Houghton, C.A. Estimating high resolution trawl fishing effort from satellite-based vessel monitoring system data. ICES J. Mar. Sci. 2007, 64, 248–255. [Google Scholar] [CrossRef] [Green Version]
- Ortiz, M.; Justel-Rubio, A.; Parrilla, A. Preliminary Analyses of the ICCAT VMS Data 2010–2011 to Identifiy Fishing Trip Behavior and Estimate Fishing Effort. Collect. Vol. Sci. Pap. ICCAT 2013, 69, 462–481. [Google Scholar]
- Marzuki, M.I. VMS Data Analyses and Modeling for the Monitoring and Surveillance of Indonesian Fisheries. Ph.D. Thesis, Universite Bretagne Loire, Rennes, France, March 2017. [Google Scholar]
- Piet, G.J.; Quirijns, F.J.; Robinson, L.; Greenstreet, S.P.R. Potential pressure indicators for fishing, and their data requirements. ICES J. Mar. Sci. 2007, 64, 110–121. [Google Scholar] [CrossRef] [Green Version]
- Vermard, Y.; Rivot, E.; Mahevas, S.; Marchal, P.; Gascuel, D. Identifying fishing trip behavior and estimating fishing effort from VMS data using Bayesian Hidden Markov Models. Ecol. Model. 2010, 221, 1757–1769. [Google Scholar] [CrossRef] [Green Version]
- Joo, R.; Bertrand, S.; Tam, J.; Fablet, R. Hidden Markov models: The best models for forager movements? PLoS ONE 2013, 8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bez, N.; Walker, E.; Gaertner, D.; Rivoirard, J.; Gaspar, P. Fishing activity of tuna purse seiners estimated from vessel monitoring system (VMS) data. Can. J. Fish. Aquat. Sci. 2011, 68, 1998–2010. [Google Scholar] [CrossRef]
- Russo, T.; Parisi, A.; Prorgi, M.; Boccoli, F.; Cignini, I.; Tordoni, M.; Cataudella, S. When behaviour reveals activity: Assigning fishing effort to métiers based on VMS data using artificial neural networks. Fish. Res. 2011, 111, 53–64. [Google Scholar] [CrossRef]
- Tassetti, A.N.; Ferrà, C.; Fabi, G. Rating the effectiveness of fishery-regulated areas with AIS data. Ocean Coast. Manag. 2019, 175, 90–97. [Google Scholar] [CrossRef]
- International Maritime Organization (IMO). Guidelines for the Onboard Operational Use of Shipborne Automatic Identification Systems (AIS); Res A.917; International Maritime Organization (IMO): London, UK, 2002. [Google Scholar]
- Kim, K.I.; Lee, K.M. Deep learning-based caution area traffic prediction with automatic identification system sensor data. Sensors 2018, 18, 3172. [Google Scholar] [CrossRef] [Green Version]
- Sang, L.Z.; Yan, X.P.; Wall, A.; Wang, J.; Mao, Z. CPA calculation method based on AIS position prediction. J. Navig. 2016, 69, 1409–1426. [Google Scholar] [CrossRef]
- Ferrà, C.; Tassetti, A.N.; Grati, F.; Pellini, G.; Polidori, P.; Scarcella, G.; Fabi, G. Mapping change in bottom trawling activity in the Mediterranean Sea through AIS data. Mar. Policy 2018, 94, 275–281. [Google Scholar] [CrossRef]
- Kim, D.S.; Arsalan, M.; Park, K.R. Convolutional Neural Network-Based Shadow Detection in Images Using Visible Light Camera Sensor. Sensors 2018, 18, 960. [Google Scholar] [CrossRef] [Green Version]
- Nair, V.; Hinton, G.E. Rectified linear units improve restricted boltzmann machines. In Proceedings of the 27th International Conference on Machine Learning (ICML-10), Haifa, Israel, 21–24 June 2010; pp. 807–814. [Google Scholar]
- Gao, B.; Pavel, L. On the Properties of the Softmax Function with Application in Game Theory and Reinforcement Learning. arXiv 2017, arXiv:1704.00805. [Google Scholar]
- Robert, C. Machine Learning, a Probabilistic Perspective; The MIT Press: Cambridge, MA, USA, 2014; pp. 62–63. [Google Scholar]
- Korea Hydrographic and Oceanographic Agency. Available online: http://www.khoa.go.kr (accessed on 24 February 2020).
- Xu, J. An extended one-versus-rest support vector machine for multi-label classification. Neurocomputing 2011, 74, 3114–3124. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Navigation Status | Ship Speed | Transmission Period |
|---|---|---|
| At anchor or moored | <3 knots | 3 min |
| >3 knots | 10 s | |
| Cruising | 0–14 knots | 10 s |
| 0–14 knots and changing course | 3.3 s | |
| 14–23 knots | 6 s | |
| 14–23 knots and changing course | 2 s | |
| >23 knots | 2 s |
| Field | Type | Data Size | |
|---|---|---|---|
| Ship Movement | Course Change | Continuous | () 1 |
| Speed | Continuous | () 1 | |
| Fishing Environment | Tidal Current | Continuous | 1 1 |
| Daylight | Categorical (0: Day, 1: Night) | 1 1 | |
| Water Temperature | Continuous | 1 1 | |
| Water Depth | Continuous | 1 1 | |
| Seabed Type | Categorical (0: Mud, 1: Shell, 2: Rock, 3: Sand, 4: Gravel) | 5 1 |
| Fishing Gear License Type | Fishing Gear Class Groups |
|---|---|
| The offshore large-scale purse seine | Purse seine |
| The medium-sized purse seine | |
| The coastal purse seine | |
| The offshore stow net | Stow net |
| The elver stow net | |
| The improved stow net | |
| The longline | Longline |
| The offshore longline | |
| The offshore drill gill net | Drift gill net |
| The offshore drill gill net | |
| The set gill net | |
| The drift gill net | |
| The offshore set gill net | |
| The offshore eel trap | Traps |
| The offshore trap | |
| The coastal trap | |
| The large-scale trawl | Single trawl |
| The large-scale bottom trawl | |
| The large steamer’s bottom trawl | |
| The east-sea medium-scale bottom trawl | |
| The large steamer’s pair bottom trawl |
| SVM-Based Fishing Gear Type Identification | |||
|---|---|---|---|
| Kernel = ‘sigmoid’ | Kernel = ‘poly’ | Kernel = ‘linear’ | |
| Purse Seine | 0.917 | 0.819 | 0.922 |
| Stow nets | 0.670 | 0.130 | 0.679 |
| Longline | 0.962 | 0.927 | 0.953 |
| Drift gill nets | 0.728 | 0.401 | 0.743 |
| Traps | 0.242 | 0.152 | 0.399 |
| Trawls | 0.922 | 0.874 | 0.918 |
| average | 0.740 | 0.525 | 0.769 |
| Label | The Number of Test Data in TW (Percentage) | The SVM-Based Model | The Proposed CNN-Based Model |
|---|---|---|---|
| Purse Seine | 1,058,558 (21.2%) | 0.922 | 0.924 |
| Stow Nets | 783,932 (15.7%) | 0.679 | 0.845 |
| Longline | 619,157 (12.4%) | 0.953 | 0.873 |
| Drift Gill Nets | 459,374 (9.2%) | 0.743 | 0.857 |
| Traps | 918,749 (18.4%) | 0.399 | 0.931 |
| Trawls | 1,153,430 (23.1%) | 0.918 | 0.925 |
| Total | 4,993,200 | 0.769 | 0.901 |
| Label | The Number of Test Data in Days (Percentage) | The SVM-Based Model | The Proposed CNN-Based Model |
|---|---|---|---|
| Purse Seine | 7111 (21.4%) | 0.935 | 0.965 |
| Stow Nets | 5226 (15.7%) | 0.721 | 0.941 |
| Longline | 4195 (12.6%) | 0.971 | 0.955 |
| Drift Gill Nets | 3077 (9.3%) | 0.782 | 0.936 |
| Traps | 6060 (18.3%) | 0.512 | 0.971 |
| Trawls | 7550 (22.7%) | 0.968 | 0.985 |
| Total | 33,187 | 0.814 | 0.963 |
| Predicted Label | |||||||
|---|---|---|---|---|---|---|---|
| Purse Seine | Stow Nets | Longline | Drift Gill Nets | Traps | Trawls | ||
| Actual Label | Purse Seine | 92.4% (978,213) | 1.2% (12,385) | 1.9% (20,218) | 1.5% (15,349) | 1.7% (17,678) | 1.4% (14,714) |
| Stow Nets | 1.2% (9329) | 84.5% (662,501) | 5.4% (41,940) | 6.7% (52,288) | 1.3% (9956) | 1.0% (7918) | |
| Longline | 0.7% (4582) | 5.9% (36,345) | 87.4% (541,019) | 4.9% (30,772) | 0.8% (4829) | 0.3% (1610) | |
| Drift Gill Nets | 0.7% (3262) | 6.7% (30,824) | 5.0% (22,785) | 85.7% (393,775) | 1.5% (7074) | 0.4% (1653) | |
| Traps | 1.3% (11,484) | 1.1% (10,106) | 2.1% (18,834) | 1.2% (10,749) | 93.1% (855,723) | 1.3% (11,851) | |
| Trawls | 1.7% (19,262) | 1.4% (15,687) | 1.5% (16,725) | 1.5% (17,071) | 1.5% (17,417) | 92.5% (1,067,268) | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, K.-i.; Lee, K.M. Convolutional Neural Network-Based Gear Type Identification from Automatic Identification System Trajectory Data. Appl. Sci. 2020, 10, 4010. https://doi.org/10.3390/app10114010
Kim K-i, Lee KM. Convolutional Neural Network-Based Gear Type Identification from Automatic Identification System Trajectory Data. Applied Sciences. 2020; 10(11):4010. https://doi.org/10.3390/app10114010
Chicago/Turabian StyleKim, Kwang-il, and Keon Myung Lee. 2020. "Convolutional Neural Network-Based Gear Type Identification from Automatic Identification System Trajectory Data" Applied Sciences 10, no. 11: 4010. https://doi.org/10.3390/app10114010
APA StyleKim, K. -i., & Lee, K. M. (2020). Convolutional Neural Network-Based Gear Type Identification from Automatic Identification System Trajectory Data. Applied Sciences, 10(11), 4010. https://doi.org/10.3390/app10114010