Research and Improvement of the Hydraulic Suspension System for a Heavy Hydraulic Transport Vehicle



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
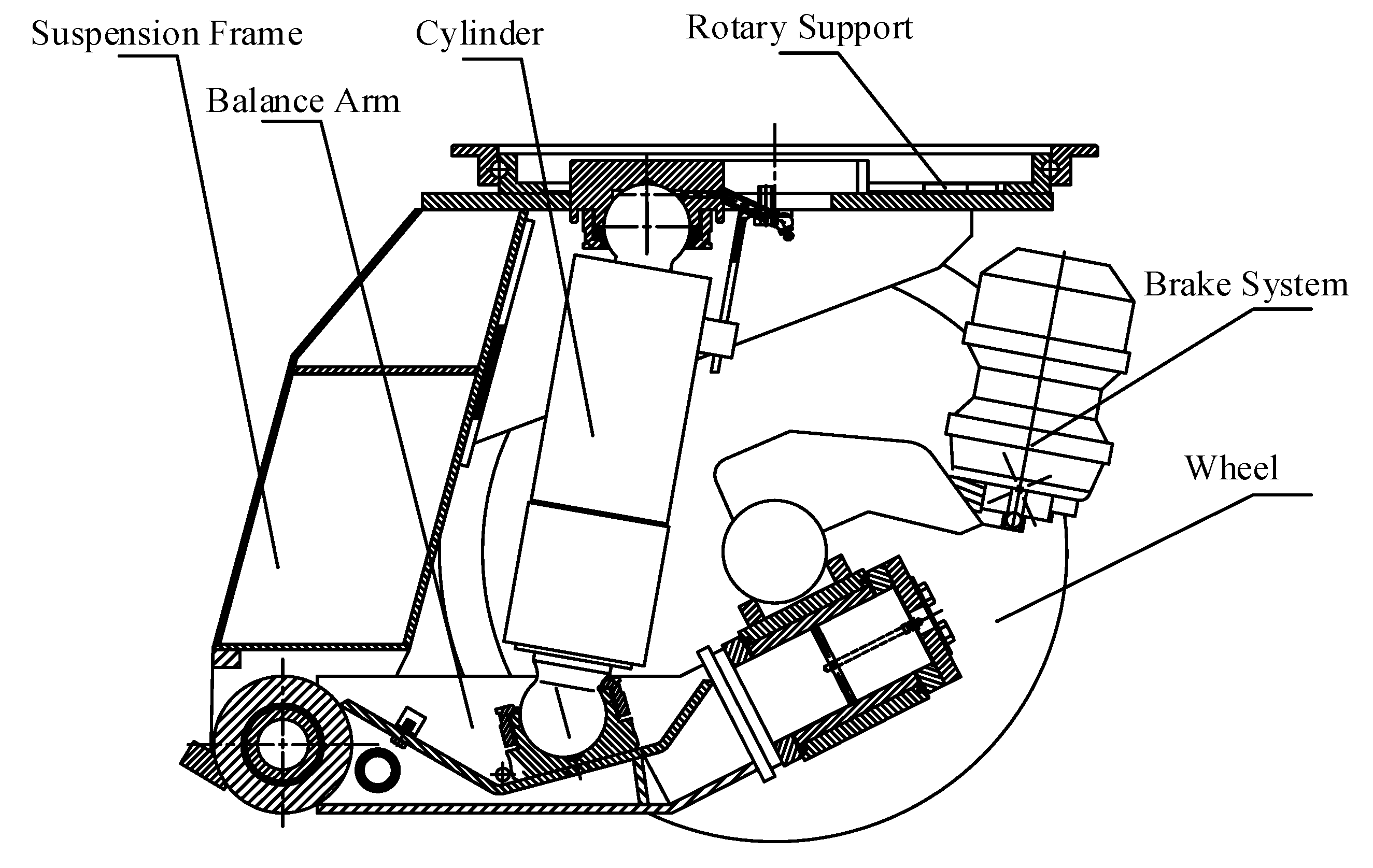
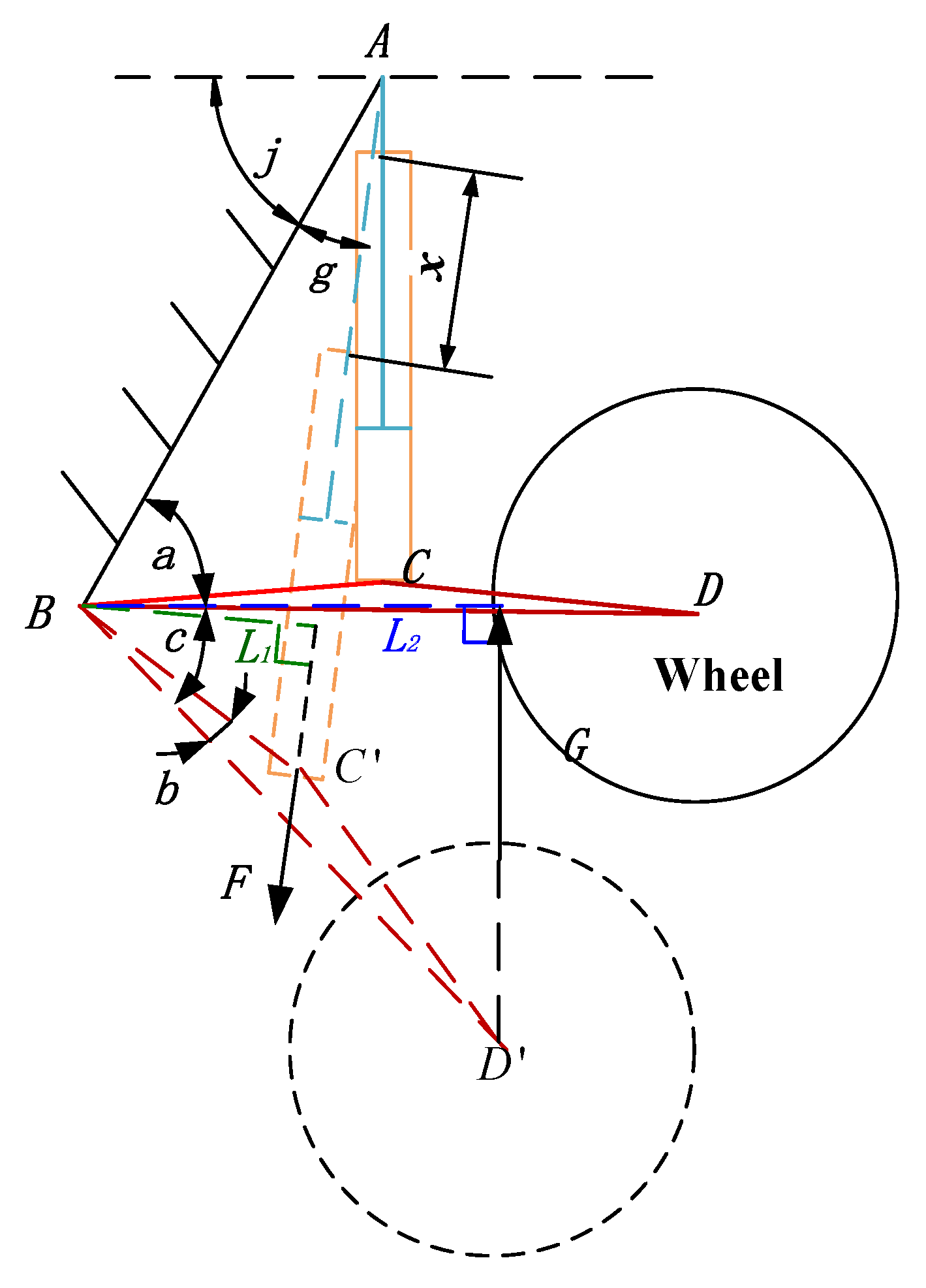
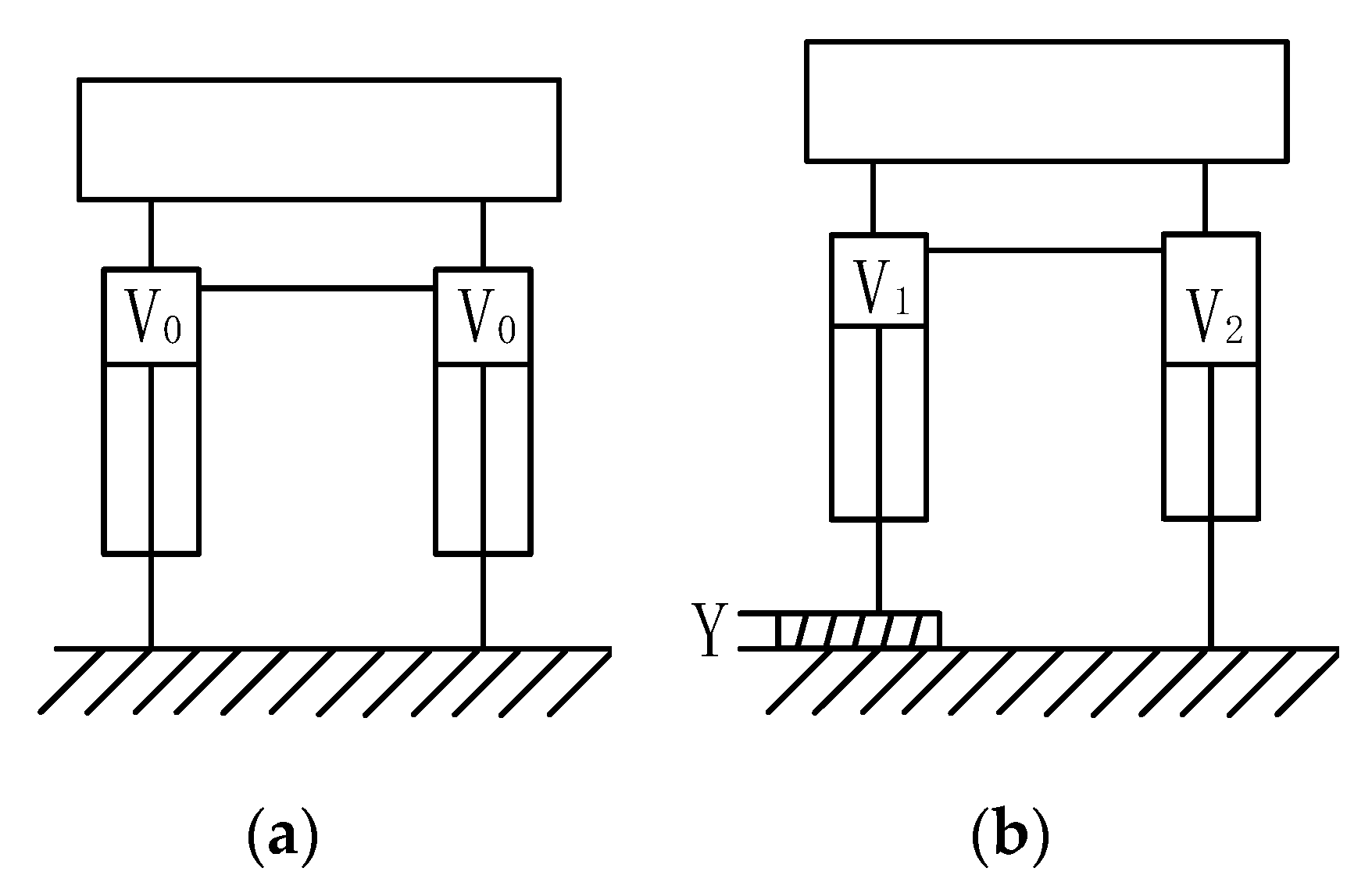
2. Analysis of the Suspension System
3. Improvement of the Suspension Hydraulic System
3.1. Accumulator Setting
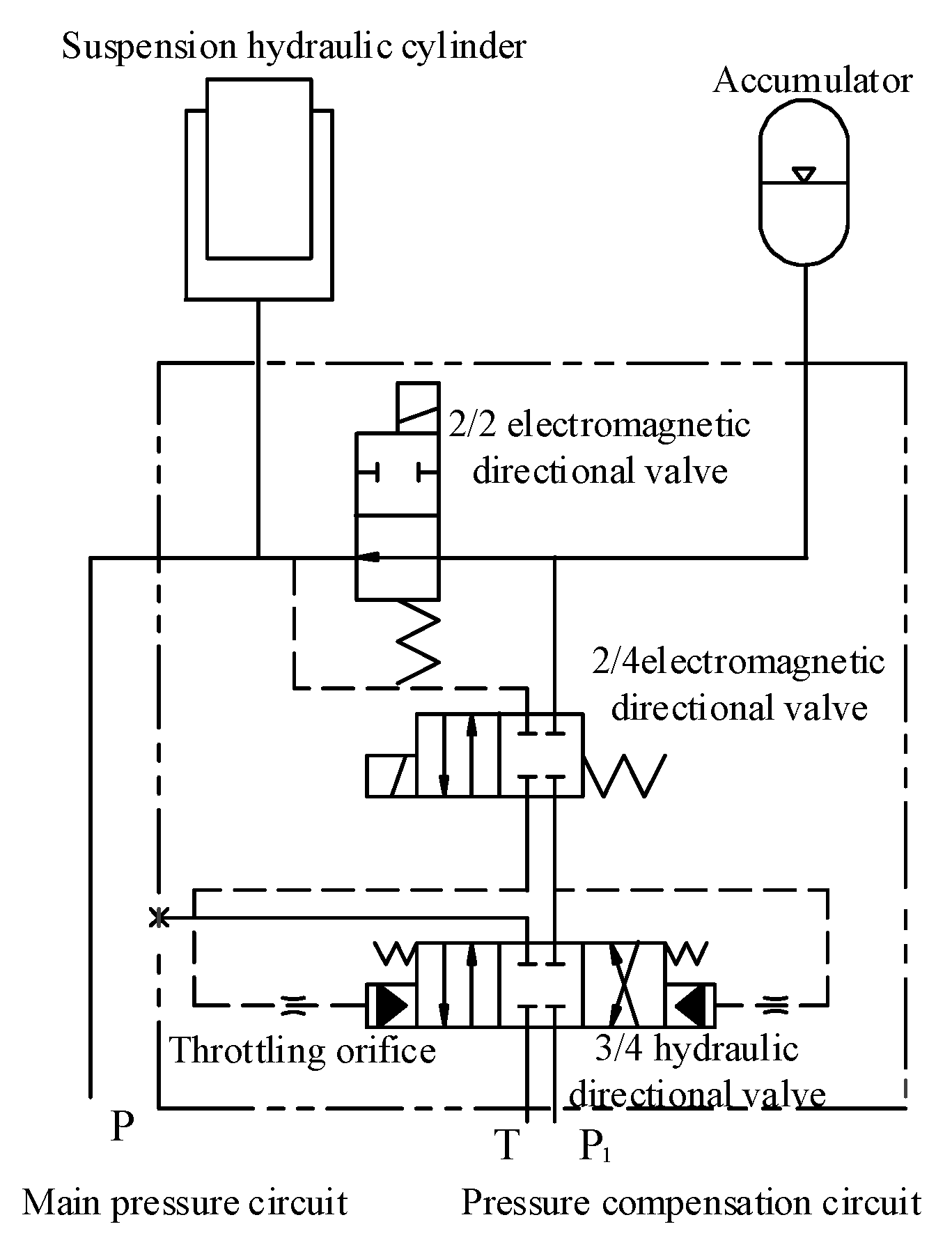
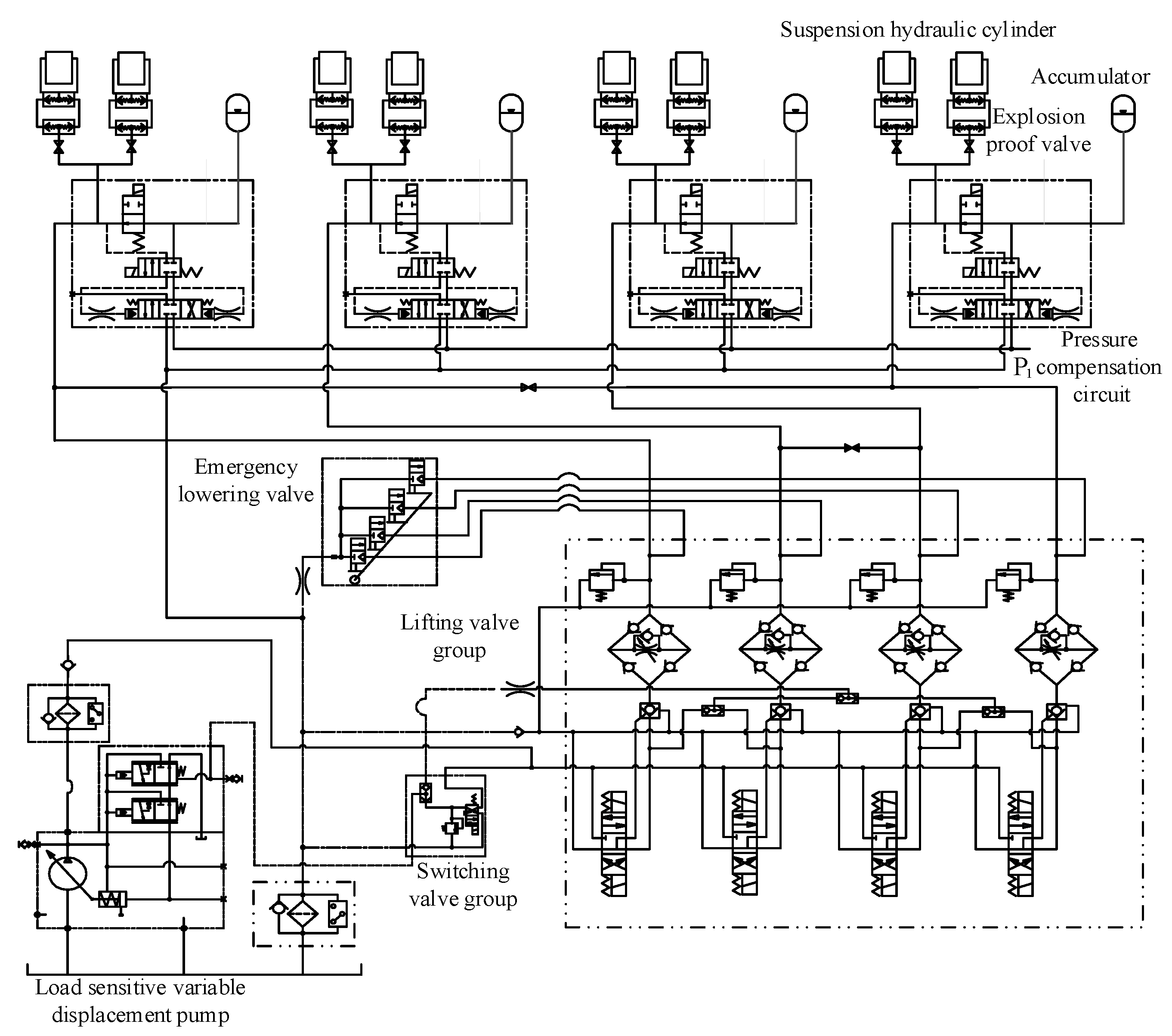
3.2. The Improved Hydraulic System of Suspension
4. Modeling and Simulation
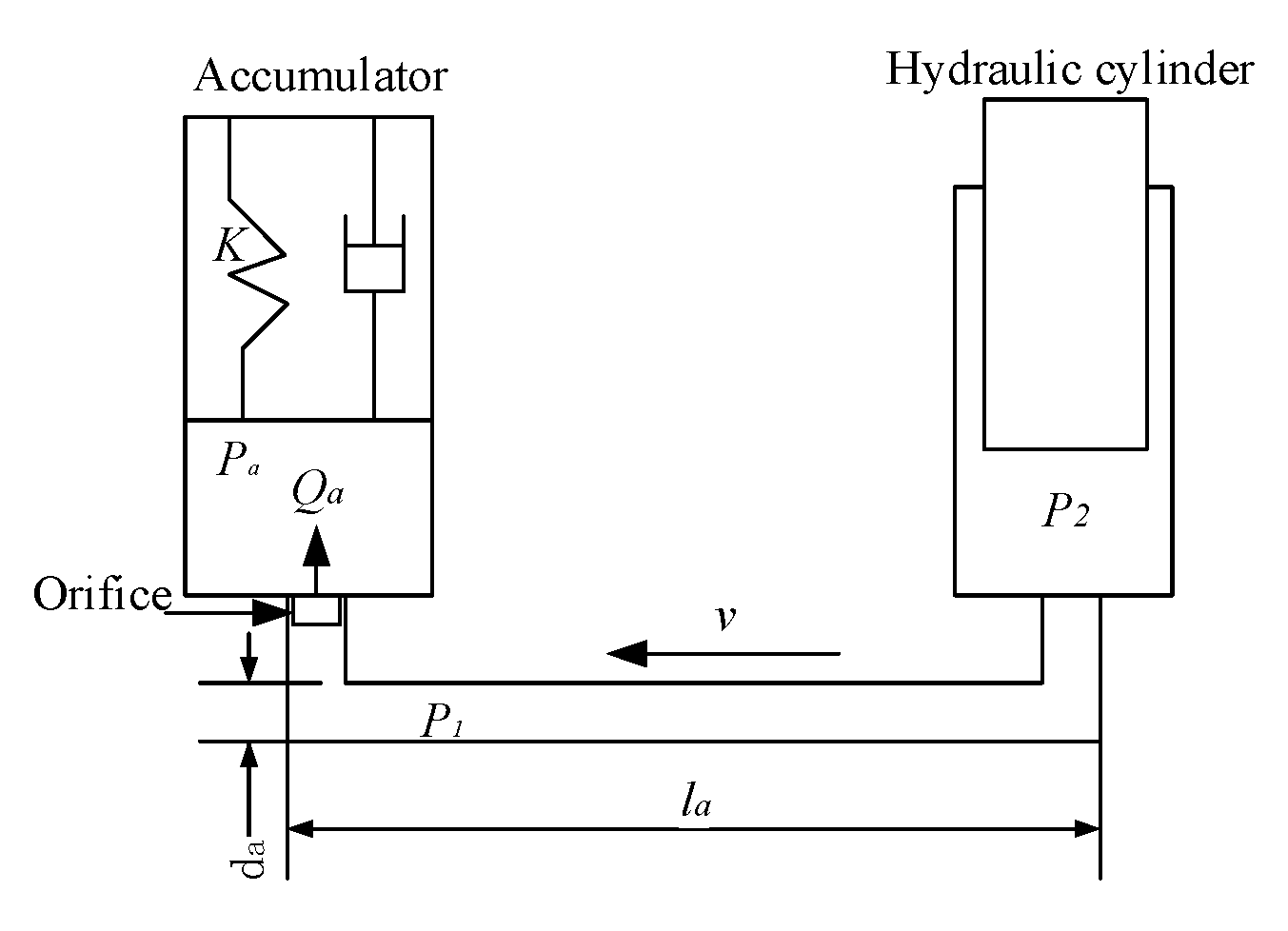
4.1. Mathematical Model Analysis of Accumulator
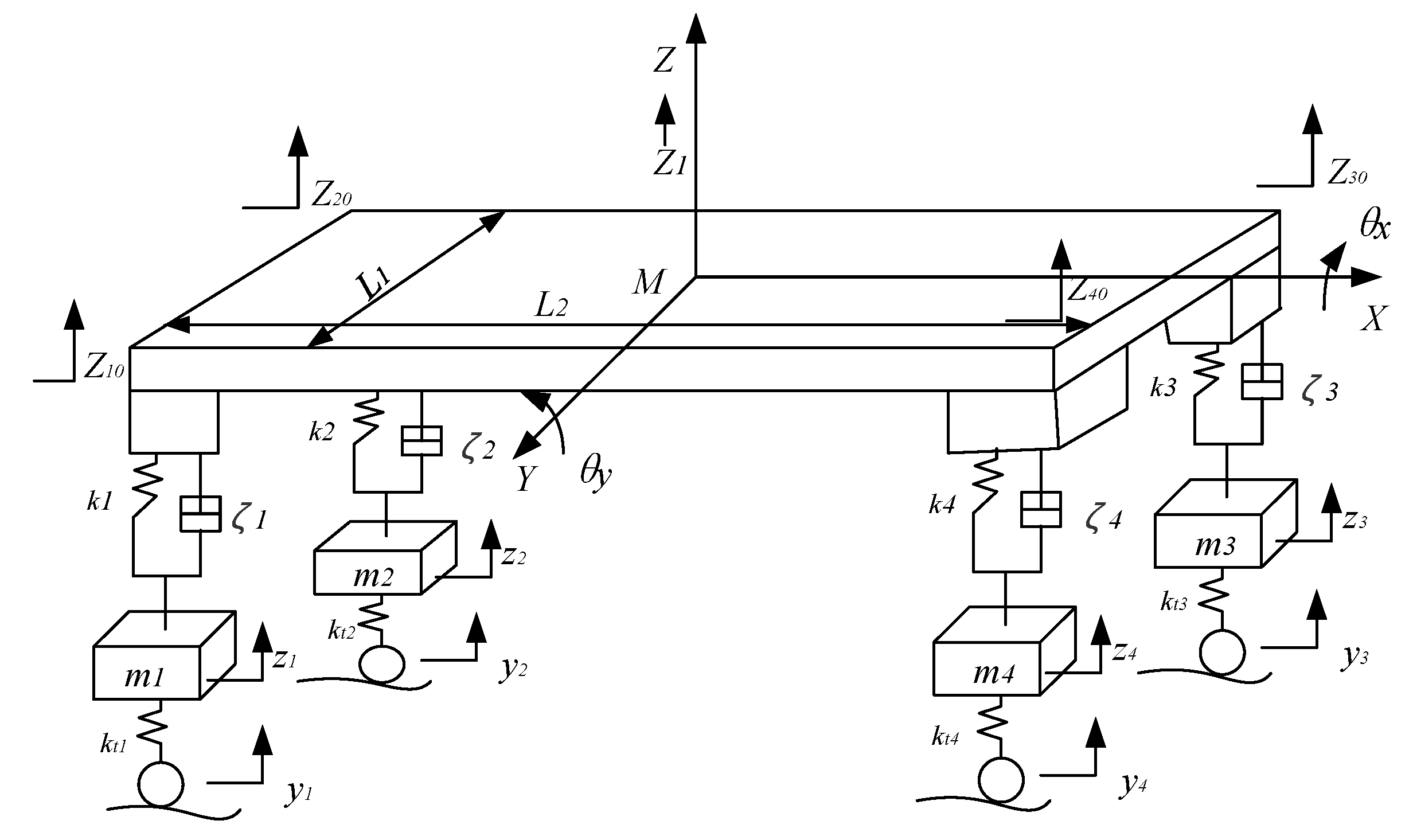
4.2. Motion Equation of the Vehicle
4.3. The Simulation Model
4.4. The Parameter Selection of the Accumulator
5. Analysis of the Experiment and Simulation
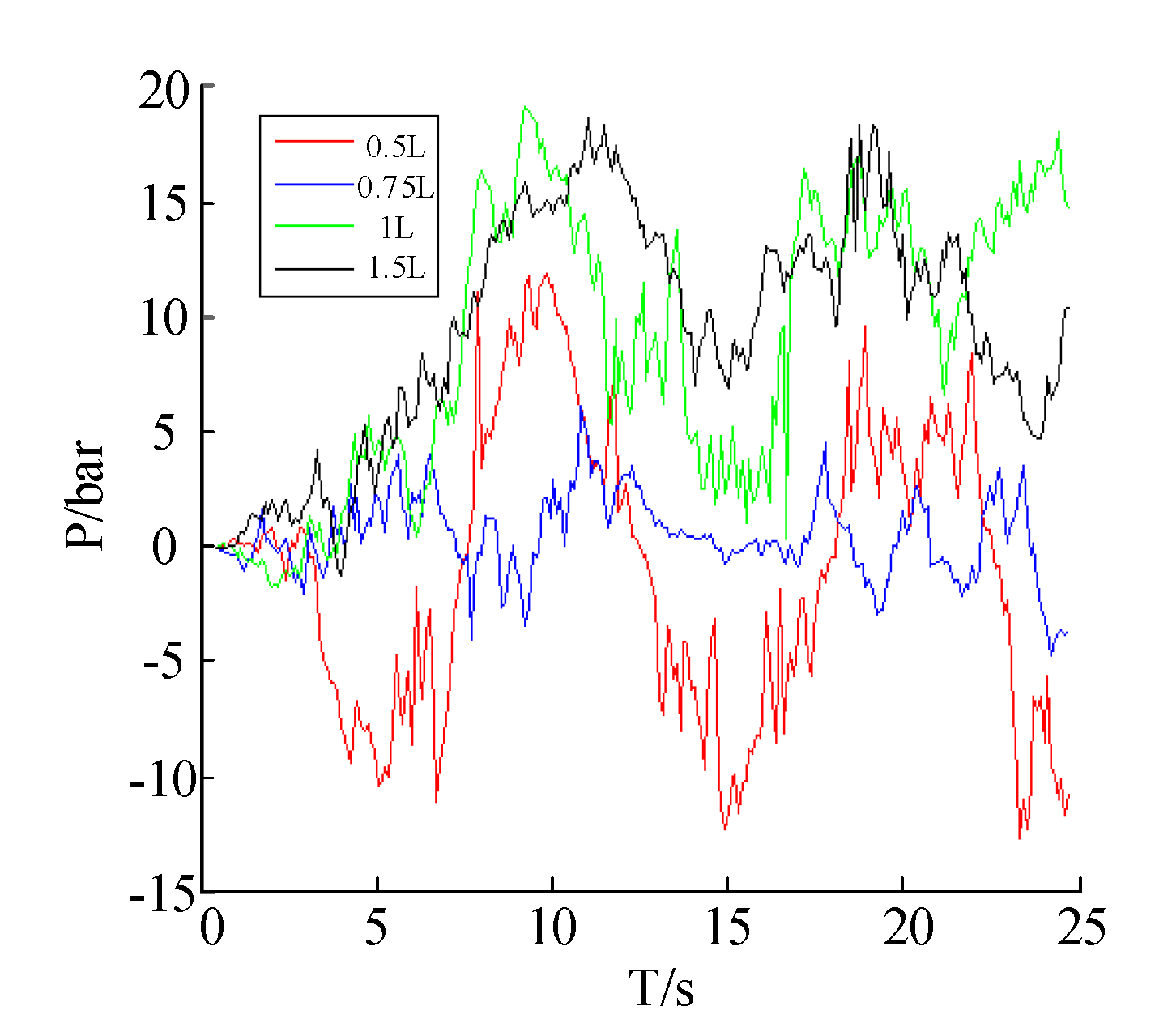
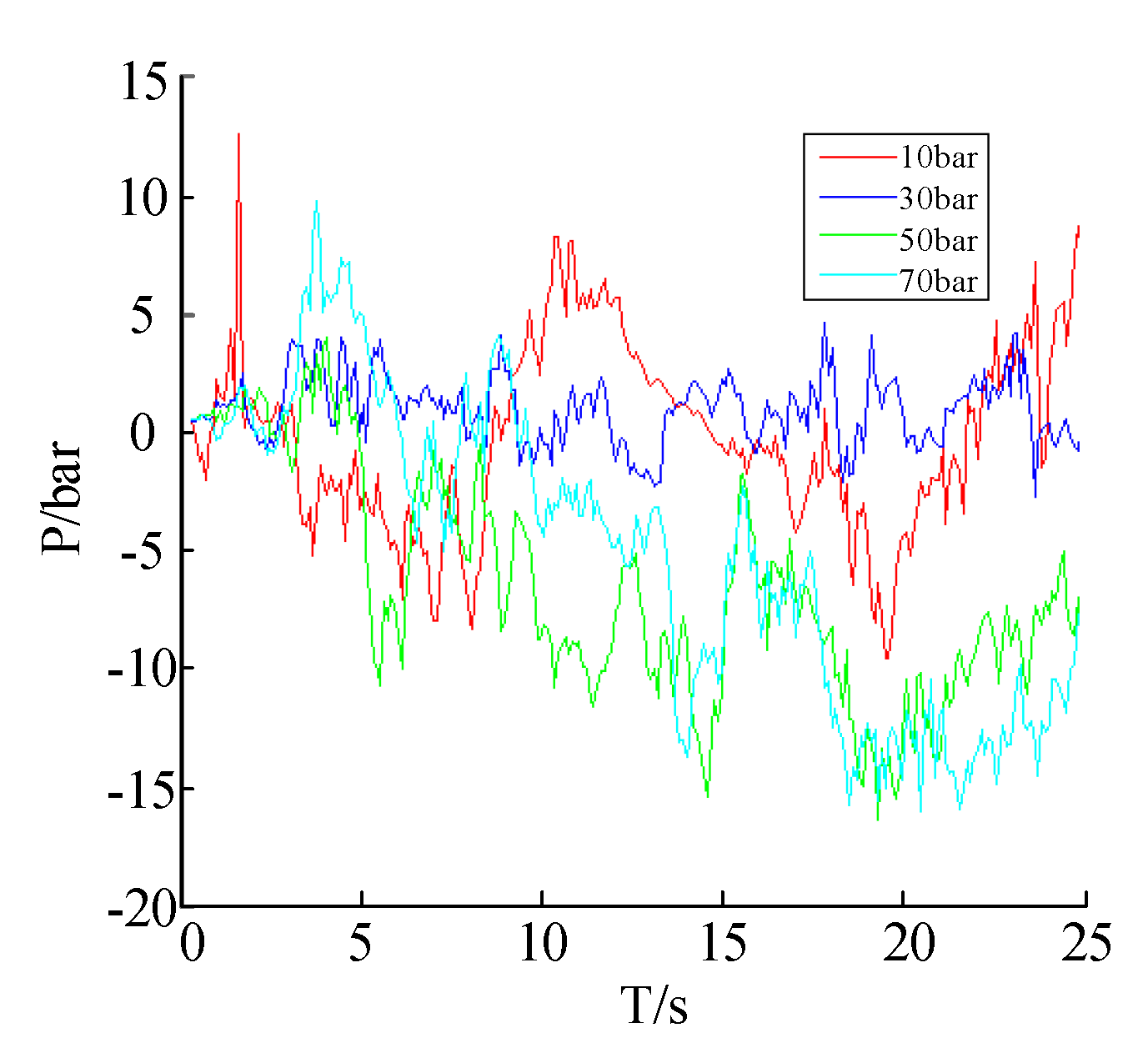
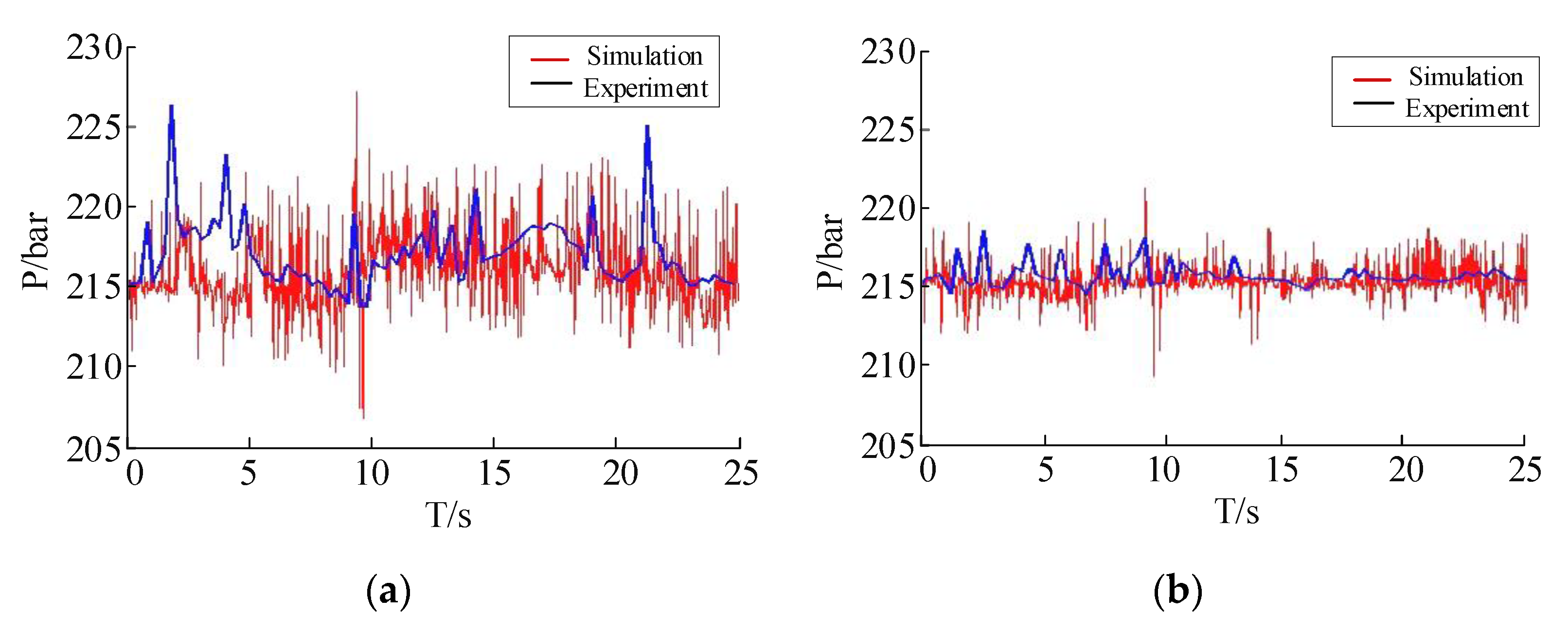
5.1. Pressure of the Suspension Cylinder
5.2. Ride Comfort of the Vehicle
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wu, B.G.; Li, S.P.; Yan, S.F. Vehicle Ride Comfort Simulation Based on Virtual Prototyping Technology. Appl. Mech. Mater. 2014, 697, 190–193. [Google Scholar] [CrossRef]
- Chen, Y.K.; He, J.; King, M.; Feng, Z.X.; Zhang, W.H. Comparison of two suspension control strategies for multi-axle heavy truck. J. Cent. South Univ. 2013, 20, 550–562. [Google Scholar] [CrossRef] [Green Version]
- Jiang, H.; Wang, B.; Huang, J. Suspension Parameters Optimization Based on Ride Comfort and Road Friendliness of Truck. Mod. Transp. Technol. 2008, 5, 71–74. [Google Scholar]
- Banerjee, S.; Balamurugan, V.; Krishnakumar, R. Ride dynamics mathematical model for a single station representation of tracked vehicle. J. Terramech. 2014, 53, 47–58. [Google Scholar] [CrossRef]
- Choi, S.B.; Han, Y.M. Vibration control of electrorheological seat suspension with human-body model using sliding mode control. J. Sound Vib. 2007, 303, 391–404. [Google Scholar] [CrossRef]
- van der Westhuizen, S.F.; Els, P.S. Comparison of different gas models to calculate the spring force of a hydropneumatic suspension. J. Terramech. 2015, 57, 41–59. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.Y.; Li, X.L.; Zhang, Y. Scheme Design of Hydro-pneumatic Spring Type Variable Damping for Some Mining Vehicle. J. Acad. Armored Force Eng. 2013, 27, 46–50. [Google Scholar]
- Ansari, F.A.; Ranjan, R.; Korade, D.N.; Jagtap, K.R. Characterizationof Hydraulic Suspension System, on The Basis of Accumulator Pressure Values for a Special Purpose Vehicle. Mater. Today Proc. 2017, 4, 709–716. [Google Scholar] [CrossRef]
- Zhang, S.Z.; Chen, J.Y.; He, L. Calculation Method of the Suspension Accumulator According to the Limiting Working Condition. Hydraul. Pneum. Seals 2019, 4, 19–25. [Google Scholar]
- Zhao, J.Y.; Kang, S.P.; Cheng, F.; Fan, L.Z. Compliance of Self-adaption Suspension Group Systems in Selfpropelled Transporters. Chin. Mech. Eng. 2016, 27, 3103–3110. [Google Scholar]
- Liu, X.; Pang, H.; Shang, Y. An Observer-Based Active Fault Tolerant Controller for Vehicle Suspension System. Appl. Sci. 2018, 8, 2568. [Google Scholar] [CrossRef] [Green Version]
- Gui, Z.; Han, F.; Zhang, H.S. An Analysis on the Effects of Road Roughness on Multi-Axle Vehicle with Hydraulic Suspension. Automob. Eng. 2010, 32, 155–158. [Google Scholar]
- Zhao, J.Y.; Cheng, F.; Guo, R.; Dai, J.J. Research on Electro-hydraulic Synchronization Driving Control for Self-Propelled Transporter Suspension Lifting. Chin. Mech. Eng. 2014, 7, 972–978. [Google Scholar]
- Dong, M.; Luan, X.T.; Liang, J.L.; Wu, B.Y. Dynamic Characteristics Analysis of Absorbing Pulsation for Bladder Accumulator. Chin. Hydraul. Pneum. 2019, 5, 109–116. [Google Scholar]
- Zhen, J.R.; Shi, W. AMESim Simulation of Accumulator Having Effection of Synchronous Cylinder. Hydraul. Pneum. Seals 2012, 5, 10–13. [Google Scholar]
- Wei, J.H.; Du, H.; Fang, X.; Guo, K. Road-Friendliness of Interconnected Hydro-Pneumatic Suspension Based on ADAMS/Simulink/AMESim. Trans. Chin. Soc. Agric. Mach. 2010, 41, 11–17. [Google Scholar]
- Peng, Y.Q. Study on Vehicle Dynamics Modeling and Optimization of Key Parameters Based on Ride Comfort. Master’s Thesis, Guangdong University of Technology, Guangzhou, China, 2015. [Google Scholar]
- Wu, C.; Wang, W.R.; Chen, Y. Simulation and validation of three-dimensional road surface spectrum. J. Zhejiang Univ. (Eng. Sci.) 2009, 43, 1935–1938. [Google Scholar]
- Huang, X.J.; Cao, Y.W.; Li, S.F. Simulation Analysis on Dynamic Loads of Heavy-Duty Semitrailer Model Based on ADAMS. J. Chongqing Jiaotong Univ. (Nat. Sci.) 2012, 31, 128–132. [Google Scholar]
- Pang, H.; Li, H.Y.; Fang, Z.D.; Wang, J.F. Stiffness Matching and Ride Comfort Optimization of Heavy Vehicle’s Suspension Based on ADAMS. Appl. Mech. Mater. 2010, 44–47, 1734–1738. [Google Scholar] [CrossRef]
- Zhou, K. Study of Heavy Transport Vehicles Side Leveling Control System. Spec. Purp. Veh. 2007, 11, 39–41. [Google Scholar]
- Zhao, J.Y.; Yang, Y.J.; Kang, S.P.; Wang, Z.J.; Liu, T.T. Research and application of four-point support “flat chasing style” leveling strategy on self-propelled hydraulic transporter. Mach. Tool Hydraul. 2015, 43, 57–60. [Google Scholar]

















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Zhao, J.; Li, W.; Jia, X.; Wei, P. Research and Improvement of the Hydraulic Suspension System for a Heavy Hydraulic Transport Vehicle. Appl. Sci. 2020, 10, 5220. https://doi.org/10.3390/app10155220
Wang J, Zhao J, Li W, Jia X, Wei P. Research and Improvement of the Hydraulic Suspension System for a Heavy Hydraulic Transport Vehicle. Applied Sciences. 2020; 10(15):5220. https://doi.org/10.3390/app10155220
Chicago/Turabian StyleWang, Jianjun, Jingyi Zhao, Wenlei Li, Xing Jia, and Peng Wei. 2020. "Research and Improvement of the Hydraulic Suspension System for a Heavy Hydraulic Transport Vehicle" Applied Sciences 10, no. 15: 5220. https://doi.org/10.3390/app10155220
APA StyleWang, J., Zhao, J., Li, W., Jia, X., & Wei, P. (2020). Research and Improvement of the Hydraulic Suspension System for a Heavy Hydraulic Transport Vehicle. Applied Sciences, 10(15), 5220. https://doi.org/10.3390/app10155220