1. Introduction
Polygonal wear is uneven wear along the circumference of train wheels and its wavelength varies from a dozen centimetres to the entire circumference of the wheel [
1,
2]. Polygonal wear with only one wavelength around the wheel circumference is called first-order polygonal wear (i.e., eccentric wear); that with two equal wavelengths is called second-order polygonal wear (i.e., elliptical wear); that with three equal wavelengths is called third-order polygonal wear, and so on. First-, second-, and third-order polygonal wear are considered low-order polygonal wear. In recent years, polygonal wear beyond the eighth order—defined as a high-order polygonal wear in the present research have often been detected on the wheels of high-speed trains, metro trains, and electric locomotives in China [
2]. Polygonal wear increases wheel–rail interaction and has a considerable effect on the use life of the components of railway vehicles and tracks. Furthermore, it threatens operation safety [
3]. Therefore, this problem has gradually become a matter of urgent public concern in the railway transportation industry in China, and globally, and thus, it has attracted the attention of many scholars over the last few years. Kaper identified polygonal wear phenomena on train wheels when he conducted research on the noise of intercity trains and studied the relationship between polygonal wear and noise in the frequency domain [
4]. Nielsen and Jin reviewed the literature on wheel polygonal wear in 2000 and 2018, respectively, and in their review, they summarised numerical simulation models of polygonal wear and explanations on its initiation mechanism and development [
2,
3].
Morys developed a dynamics model of an ICE-1 high-speed Garman train to investigate the polygonal wear mechanism. In the model, the wheelset mass modelling included five parts (two wheels and three brake discs), and they were all regarded as rigid bodies [
5,
6,
7]. Three-dimensional rotational spring-damper units were used as connections to characterize the bending and torsional properties of the wheelset. The results showed that the bending resonant modes of the wheelset were excited by the fluctuating vertical force of the wheel–rail, and this led to a scenario where the lateral creep force of the wheel–rail varied periodically and the polygonal wear occurred on the rolling circle of the wheel.
Based on the Morys’s simulation model, Meinke considered beam elements as connections instead of three-dimensional rotational spring dampers [
8]. Then, the effect of rotational inertia, gravity, and the gyroscopic moment of the wheelset on the initiation of polygonal wear was considered. In addition, imbalance calculations and long-term wear simulation were performed.
Meywerk established a coupling dynamics model that included an elastic wheelset and two elastic rails to study the formation of polygonal wear [
9]. The results showed that flexible deformations of the wheelset and rails, caused by their interaction, resulted in the initiation and development of polygonal wear. The first and second bending modes of the wheelset played an important role in initiating polygonal wear.
This literature focused on the characteristics and mechanisms of low-order polygonal wear. Chen proposed a finite element model of a wheelset’s rolling contact with two rails using commercial finite element software to conduct research to identify the root cause of polygonal wear [
10]. Chen suggests that the self-excited vibration of the wheel–rail system leads to polygonal wear at a frequency of 150 Hz. A suitable sleeper support stiffness or wheel–rail friction coefficient can be controlled to limit the development of polygonal wear.
Tao et al. conducted extensive measurements of polygonal wear on electric locomotive wheels with radii of 1050–1200 mm at the average operation speed of 80 km/h [
11,
12]. The measurement results showed that the dominant orders of the polygonal wear of locomotive wheels were 18th, 19th, and 24th, and depended on wheel diameter. The initiation mechanism of the polygonal wear of the locomotive wheels is not captured in this paper.
Jin et al. studied the mechanism of the ninth-order polygonal wear in wheels of metro trains with a linear induction motor using a detailed site test and observation [
13]. They found that the resonant frequency of the first wheelset bending matched the exciting frequency of the ninth-order polygonal wear. When the first wheelset bending mode was excited, the period of lateral creepage and force between wheel and rail occurred. Furthermore, the ninth-order polygonal wear gradually appeared.
Wu et al. studied the mechanism of polygonal wear of high-speed train wheels through extensive field tests [
14]. The operation speed of the tested train was 250 km/h, and the diameter of the wheels was 860 mm. The results showed that the mechanism of wheel polygonal wear of high-speed trains could be attributed to the excited resonance of the train–track coupling system in operation and changing the operating speed could suppress the development of polygonal wear effectively.
In [
13,
14], the authors conducted many experiments to investigate the mechanism of high-order polygonal wear, but both studies lacked in-depth theoretical research and numerical simulation.
Wu et al. studied the root cause of high-order polygonal wear [
15]. Their study concluded that there was a ~650 Hz bending mode of the rail segment between the front and rear wheelsets of the same bogie. This bending mode was identified as the primary contributor to polygonal wear. However, in the literature [
15], the exciting frequency of the polygonal wear is 550–600 Hz, which does not match the bending mode frequency very well. The conclusions of this paper lack experimental verification.
Cai et al. presented a detailed investigation into the mechanism of metro wheel polygonal wear using on-site experiment numerical simulations [
16]. The measurement results showed that more than 70% of the metro wheels had sixth- to eighth-order polygonal wear. In this paper, P2 resonance was suggested as the main contributor to polygonal wear, and the flexibility of the wheelset was also found to influence the formation of polygonal wear. However, this is not enough to explain the higher order polygonal wear, which occurred in high-speed conditions.
The literature discussed above provides a certain understanding of wheel polygonal wear problems. However, thus far, consistent understanding on the mechanism of polygonal wear is lacking. To understand the mechanisms of the initiation and development of high-order polygonal wear of railway wheels clearly, this paper conducts a detailed investigation into the high-order polygonal wear of the high-speed trains in China via extensive experimental analysis and numerical simulation.
The remainder of this manuscript is organised as follows:
Section 2 analyses the data measured from more than 1000 sets of polygonal wheels in the field and provides information on the important relationship between polygonal wear order and wheel diameter size.
Section 3 presents a simulation model to predict the initiation and development of polygonal wear. In
Section 4 and
Section 5, the model is used to verify the key conditions of initiation and the development of high-order polygonal wear and to calculate the relationship between polygonal wear and high-speed development, train operation speed, and wheel diameter change.
2. Characteristics of Polygonal Wear of High-Speed Wheels
Polygonal wear occurs on the wheels of many high-speed trains. The census test of polygonal wear was conducted over a long time in this paper. The tested polygonal wheels comprised about 48,000 sets and the test mileage was >200,000 km after re-profiling.
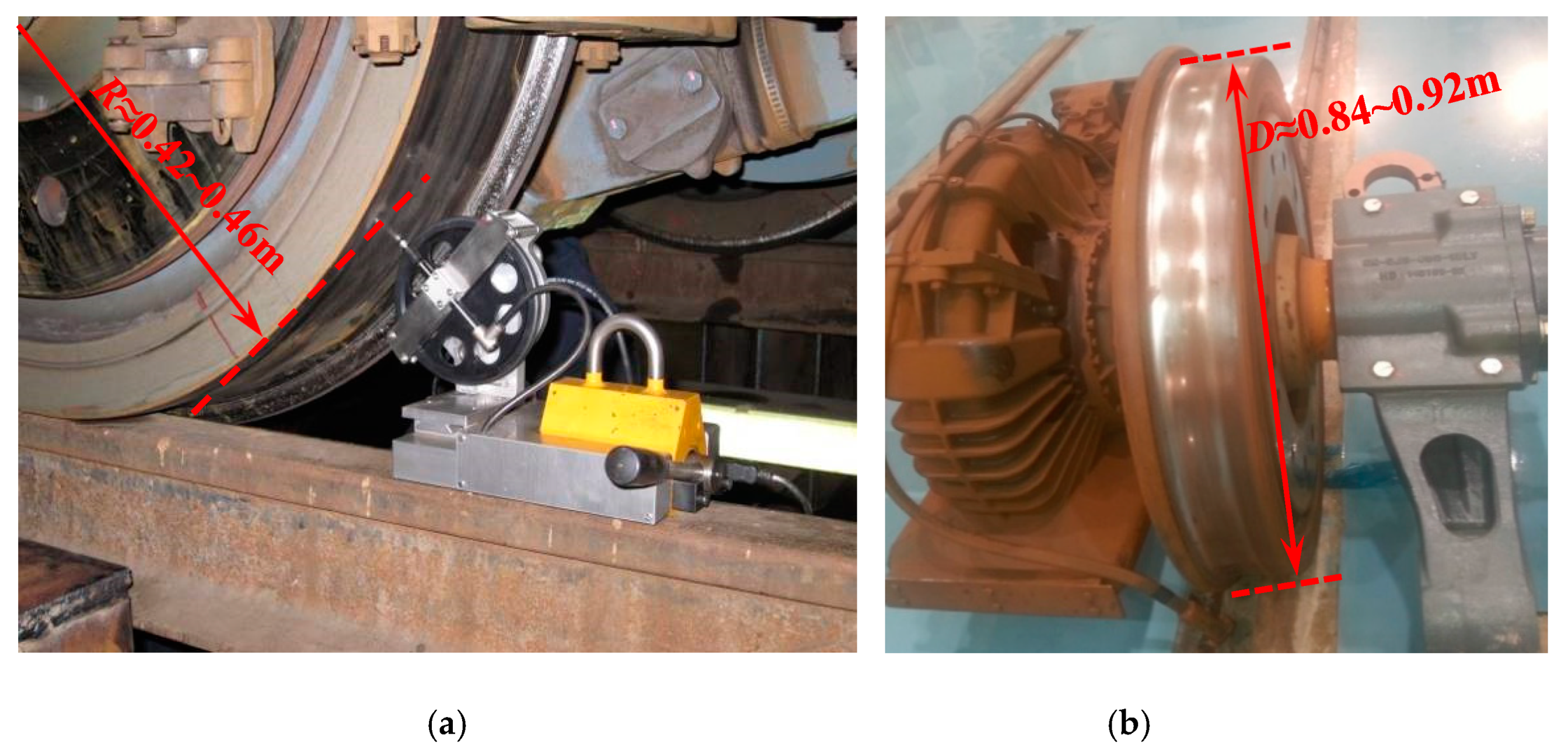
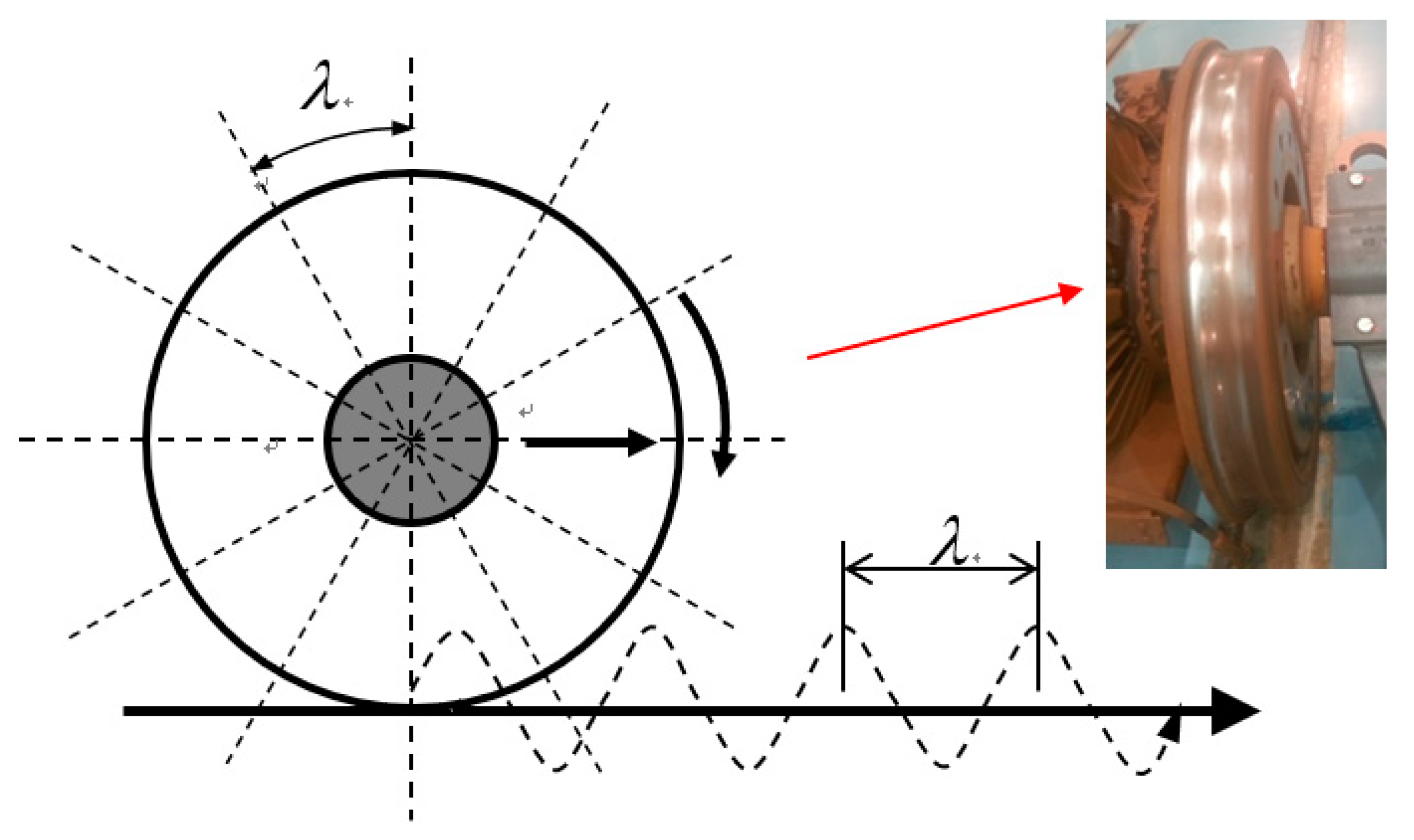
Figure 1a shows the Müller–BBM wheel roughness test instrument which was used for measuring polygonal wear, and
Figure 1b shows a typical polygonal CL60 steel wheelset, which was provided by CSR Tangshan Rolling Stock Co., Ltd. During the test, the measured wheelsets were jacked up using hydraulic equipment so that the wheel could rotate around its axis line freely. The displacement sensor of the roughness test instrument contacts the wheel tread to measure the radial change in the wheel.
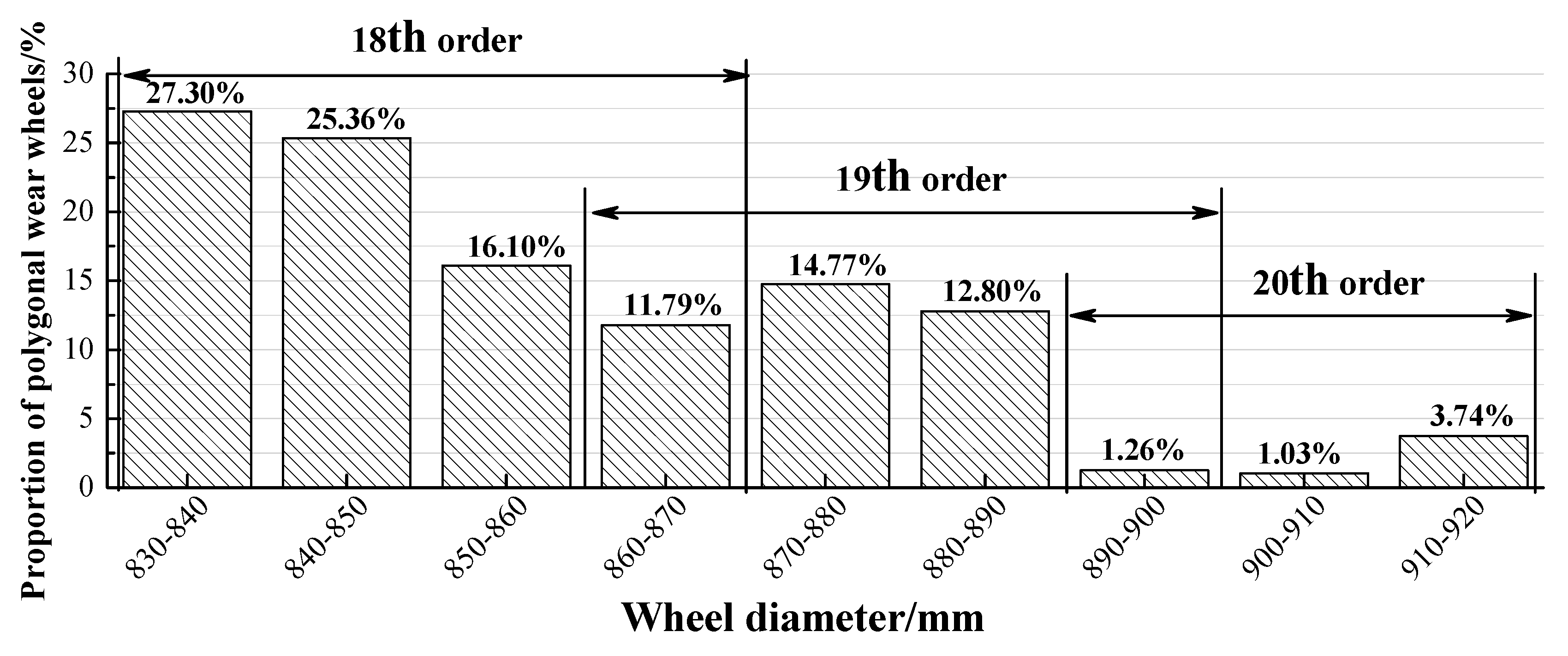
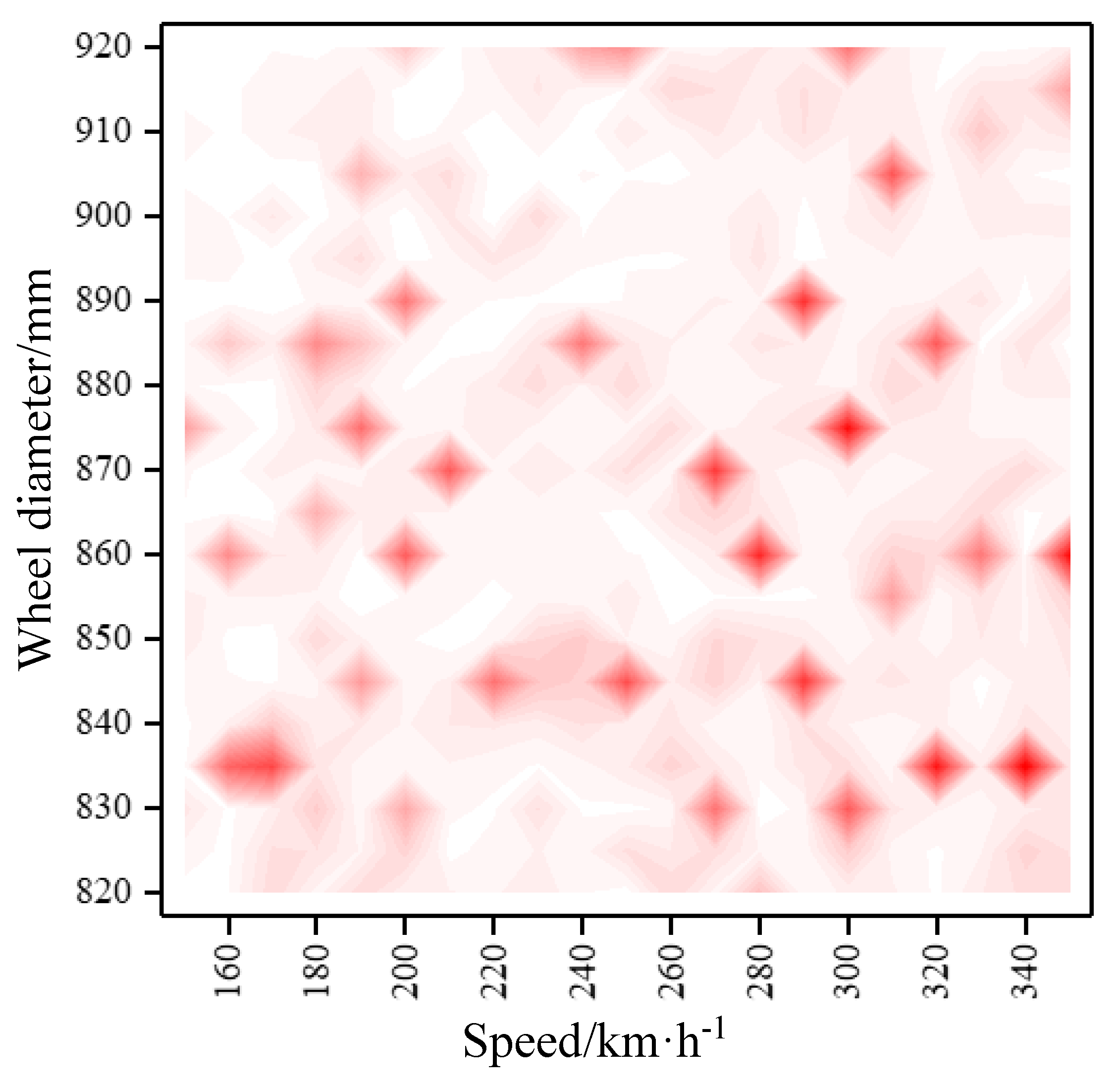
Figure 2 shows the proportion of the polygonal wheel with a diameter change. The proportion of the polygonal wheel represents the quotient, which is the number of polygonal wheels divided by the number of all measured wheels with diameters of 830–840 mm, 840–850 mm, and 910–920 mm. A diameter of 920 mm is the nominal diameter for new high-speed wheels.
In the analysis, shown in
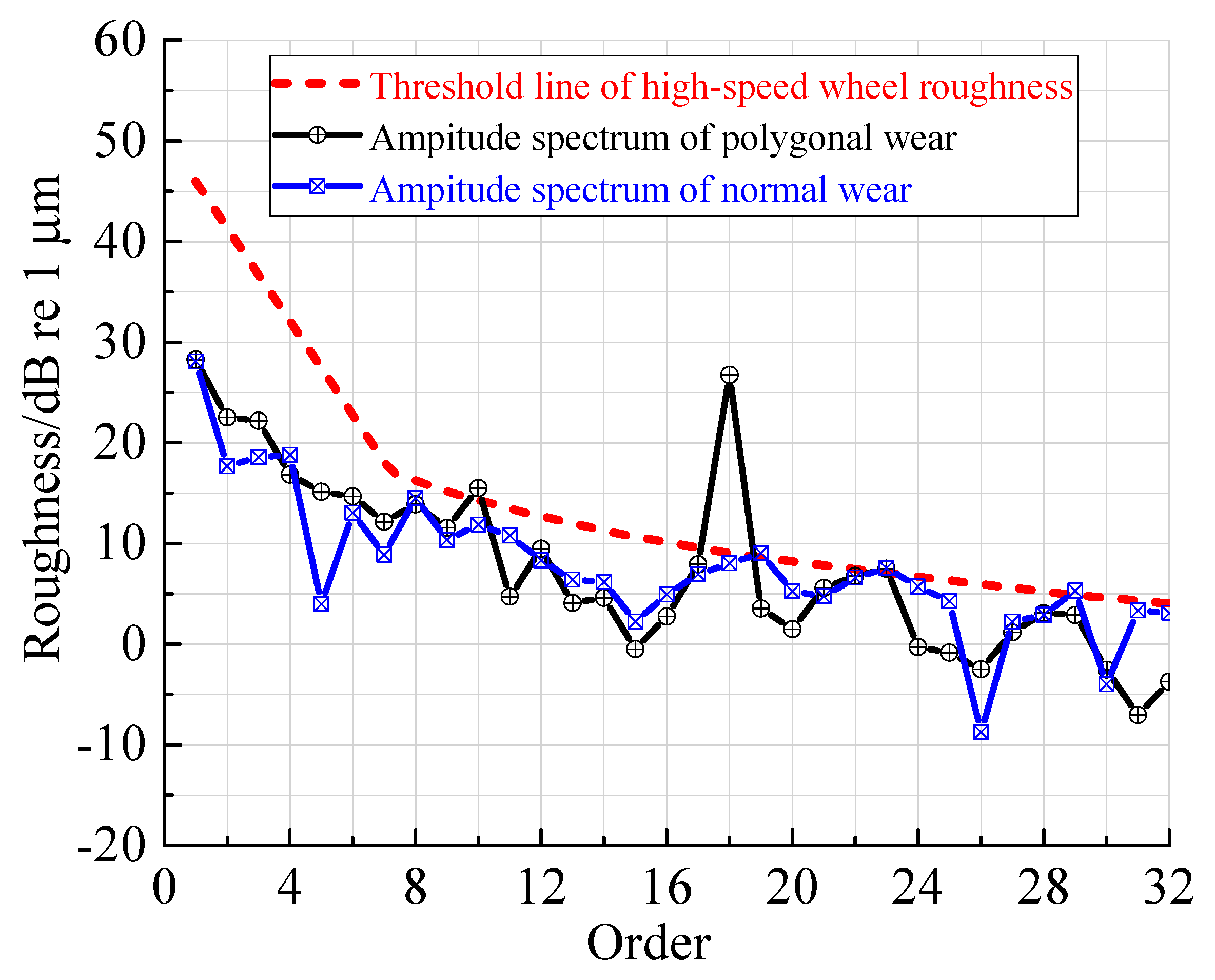
Figure 2, the threshold of “high-speed” rail roughness (ISO-3095 Third edition 1 August 2013) was used as the threshold for high-speed wheels because there are no official partition criteria in China railways so far. Temporary (suggested) partition criteria for polygonal wear and non-polygonal wheels are designed by rolling stock companies and railway transport departments in China based on their requirements. The temporary partition criteria consider the rail roughness threshold line specified in ISO-3095 for the maintenance of high-speed wheels with severe polygonal wear. If the depths (peak to valley) of the polygonal wear of some dominant orders exceed the high-speed wheel roughness threshold line, the occurrence of the polygonal wear phenomenon is confirmed. As shown by the black line in
Figure 3, the peak of 18th-order exceeds the roughness threshold line; thus, the wheel is regarded as a polygonal wheel. For the blue line in
Figure 3, there is no peak exceeding the roughness threshold; thus, the wheel is regarded as a normal wheel. It is noted that ISO-3095 shows that the threshold line of rail roughness includes the wavelengths of 0.3 cm to 40 cm only. The polygonal wear of high-speed wheels covers the wavelengths of 12 cm to the whole wheel circumference. However, the wavelengths of the polygonal wear, which are much more concerned with the point view of controlling dynamic behaviour and noise, are in the range determined by the ISO-3095.
Through the statistical analysis of the test data, the characteristics of polygonal wear can be concluded as follows:
Wheels with different diameters have different proportions of polygonal wheels and different dominant orders (main wavelength) of polygonal wear (
Figure 2). Furthermore, it seems that the smaller the diameter, the higher the proportion of the polygonal wheels. This depends on the depth of the decarburised layer on the surface of the wheel.
The proportion of polygonal wheels exhibits a non-monotonic variation as a function of the wheel diameter, including three local maxima around 830–840 mm, 870–880 mm, and 910–920 mm, corresponding to three periods of high-rate development.
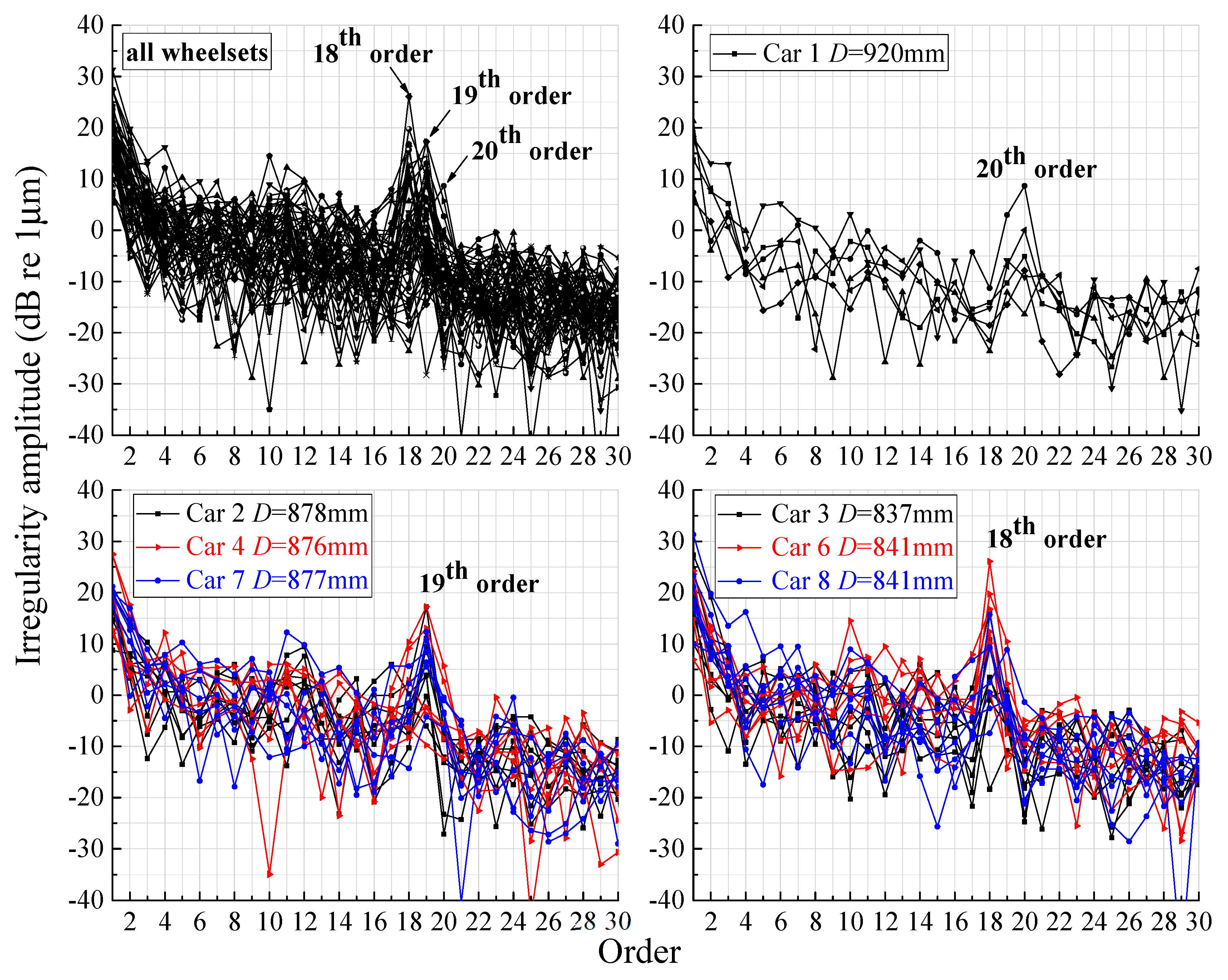
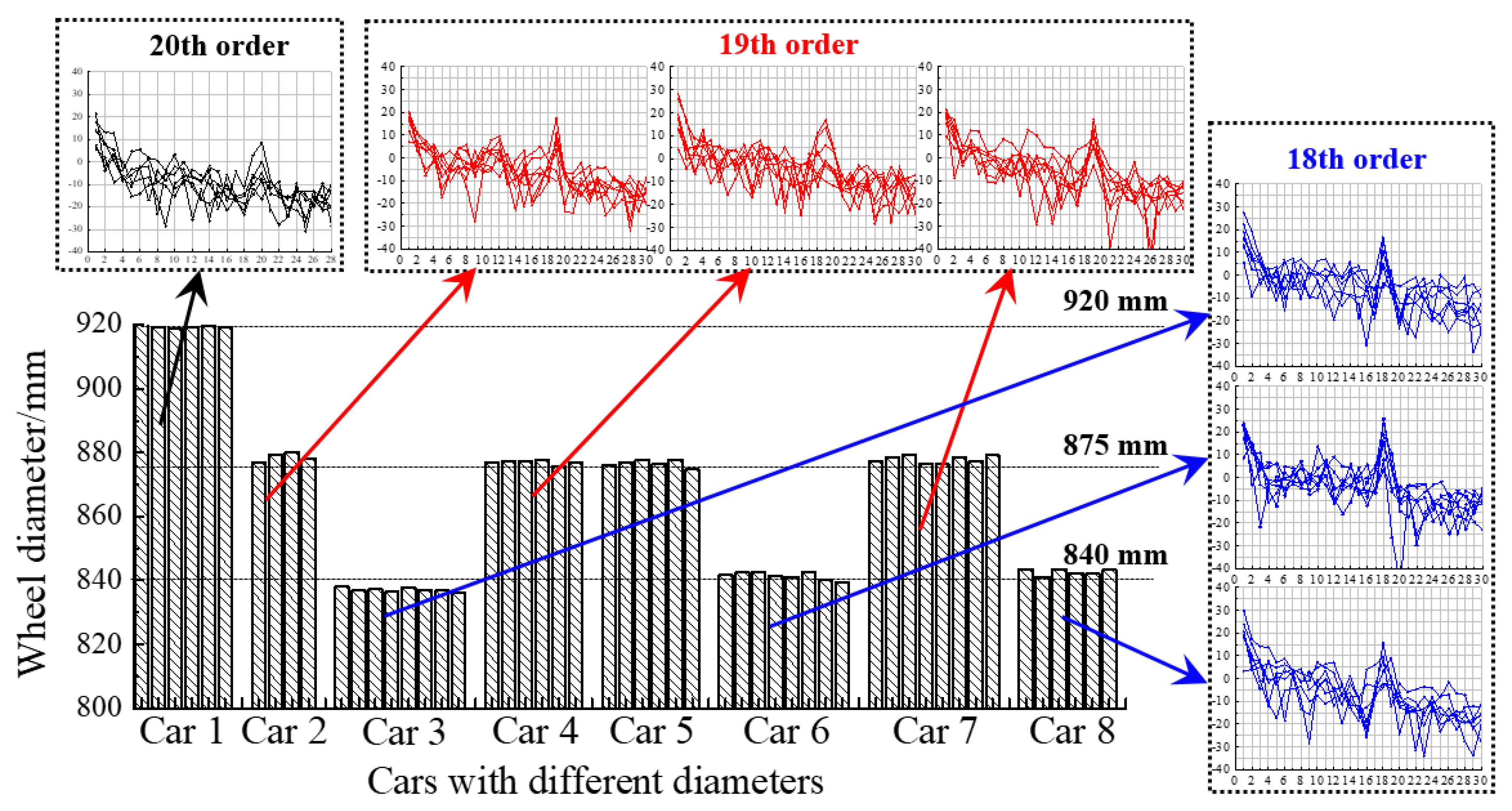
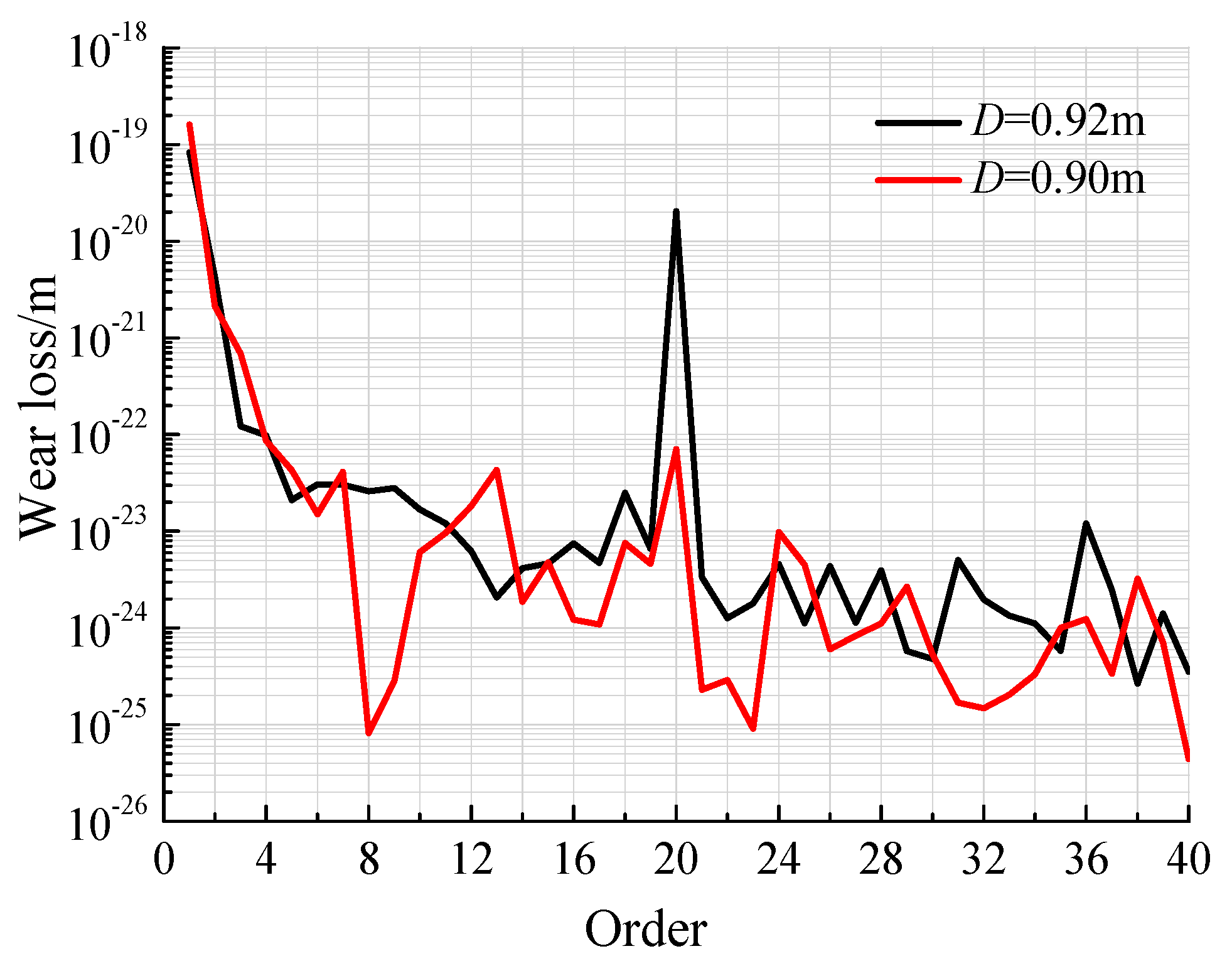
Figure 4 shows the roughness spectra of polygonal wear, measured from different cars for a typical high-speed train. The subgraphs show that different cars have different polygonal wear orders. The polygonal wear of the 20th order occurred on Car 1; 19th order occurred on Cars 2, 4, and 7; 18th order occurred on Cars 3, 6, and 8.
Figure 5 denotes the diameter change in the wheels corresponding to the polygonal wear of different orders that occurred on this typical train. The wheels of the tested train had different diameters, and this was not done intentionally. This high-speed train was used as a test train for long-term follow-up investigations into the dynamic behaviours and wear states of wheels/rails. The diameters of the wheels of the train were different because of the wear and re-profiling caused by an increase in operational mileage. The polygonal wear and fatigue states of the wheels determine their metal cutting quantity during re-profiling. Therefore, the cutting quantities of the wheels in re-profiling were different.
Figure 5 shows that the wheels with diameters of ~920 mm generated a 20th-order polygonal wear; those with an 875 mm diameter produced 19th-order wear; those with 830–840 mm diameters formed 18th-order polygonal wear. This clearly indicates that a decrease in the diameter leads to a decrease in the polygonal wear order. Furthermore, the measured results of the wheels of car 5 do not indicate polygonal wear in
Figure 4 and
Figure 5 because the re-profiling of its wheels was conducted just before polygonal wear measurement.
The exciting frequency of the polygonal wear is calculated as:
where
f denotes the exciting frequency of the polygonal wear,
v denotes the operating speed of the vehicle,
D denotes the diameter of the wheel, and
n represents the polygonal wear order. Equation (1) indicates that wheels with different diameters have different polygonal wear orders at the same exciting frequency. For the present test case,
f is ~570–580 Hz. This means that the wheels are excited in the frequency range of 570–580 Hz, and could produce the 18th to 20th order polygonal wear, corresponding to different wheel diameters. Therefore, it is necessary to clearly find where the 570–580 Hz vibrations are coming from (the vehicle or the track or their coupling resonance). That is the key to explaining the mechanism of initiation and development of high-order polygonal wear, and this will be further discussed later.
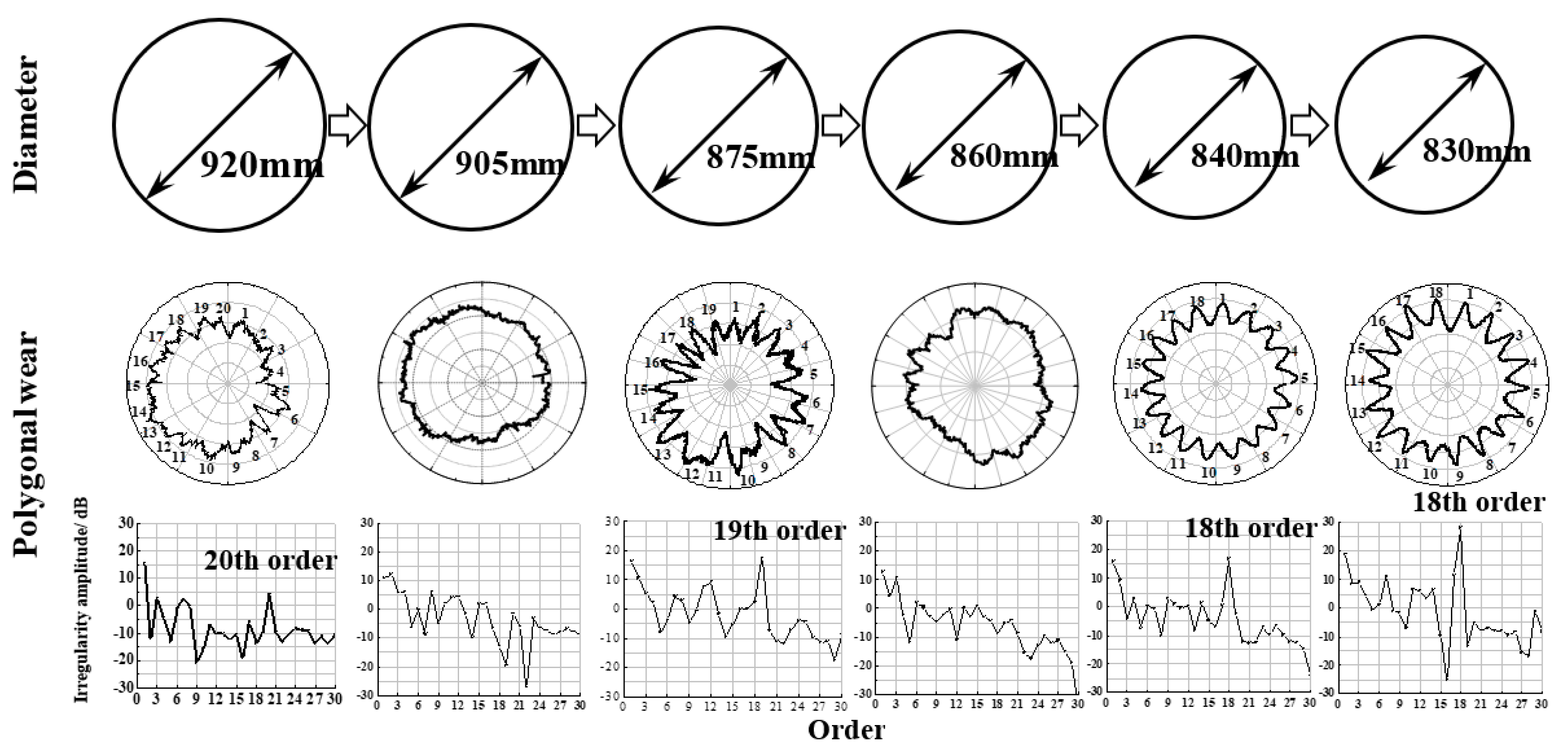
The test results of the same train are shown in
Figure 6. The first row in
Figure 6 indicates the wheel diameter reduction from 920 to 830 mm; the second row denotes the polygonal wear described in the polar coordinate system corresponding to different wheel diameters; the third row illustrates the order of the polygonal wear, which is also called the roughness spectra of the polygonal wear. In the test, the train operation speed was 300 km/h. The interval of wheel re-profiling was 200,000 km.
Figure 6 shows the states of polygonal wear at six different wheel diameters—920, 905, 875, 860, 840, and 830 mm. The nominal diameter of new wheels is 920 mm, and 830 mm is the diameter close to the end of the wheel use life. During service, the wheel diameter changes from large to small because of wear and re-profiling. Indeed, at wheel diameters of ~920, 875, and 830–840 mm, a polygonal wear of the 20th, 19th, and 18th orders occur, respectively. According to Equation (1), the passing frequencies of the polygonal wear of three different orders or the resultant exciting frequencies between the wheel and rail are ~580 Hz at 300 km/h.
Figure 6 further indicates that polygonal wear develops at a high rate at the three stages, at which the wheel diameters decreased in their whole use life, and they are, respectively, the initial stage of new wheel use, the wheel diameter near 875 mm, and the stage when the diameter is between 840 and 830 mm, in the present investigation case. Further, this phenomenon can be illustrated using
Figure 5. For a wheel diameter around 905 and 860 mm, irregular wear with periodic character or equal-wavelength, or polygonal wear, is not serious.
From the statistical results of the tracking test in the field, the most prominent feature of polygonal wear is that there is nearly a one-to-one relationship between the wave number (or dominant order) of the polygonal wear and wheel diameter. For different wheel diameters, the wavelengths (or passing frequencies) of polygonal wear are considerably near at a constant operation speed, which suggests that the vehicle system in operation generates a vibration at nearly the same resonant frequency, thereby causing polygonal wear on the wheels. The resonance of the vehicle leads to polygonal wear. The smaller the diameter, the smaller the wave number.
4. Discussion on the Calculated Results of High-Order Polygonal Wear
Wheels with different diameters have different wavenumbers of high-order polygonal wear; however, their exciting frequencies are the same and, in general, they are in the range of 570–580 Hz (as shown in
Section 2). The wheelset discussed has a bending mode of 576 Hz (as shown in
Section 3.1). It is obvious that the modal frequency is close to the exciting frequency of the polygonal wear at 300 km/h. An experimental analysis of the mechanism of high-order polygonal wear of high-speed trains was conducted [
12]; in that study, the authors suggested that the mechanism of polygonal wear is attributed to the excited resonance of the train–track coupling system in operation through the field tests. Therefore, the mechanism of the polygonal wear should be further investigated by developing the simulation model that involves the flexible deformation (bending deformation) of the wheelset in this paper.
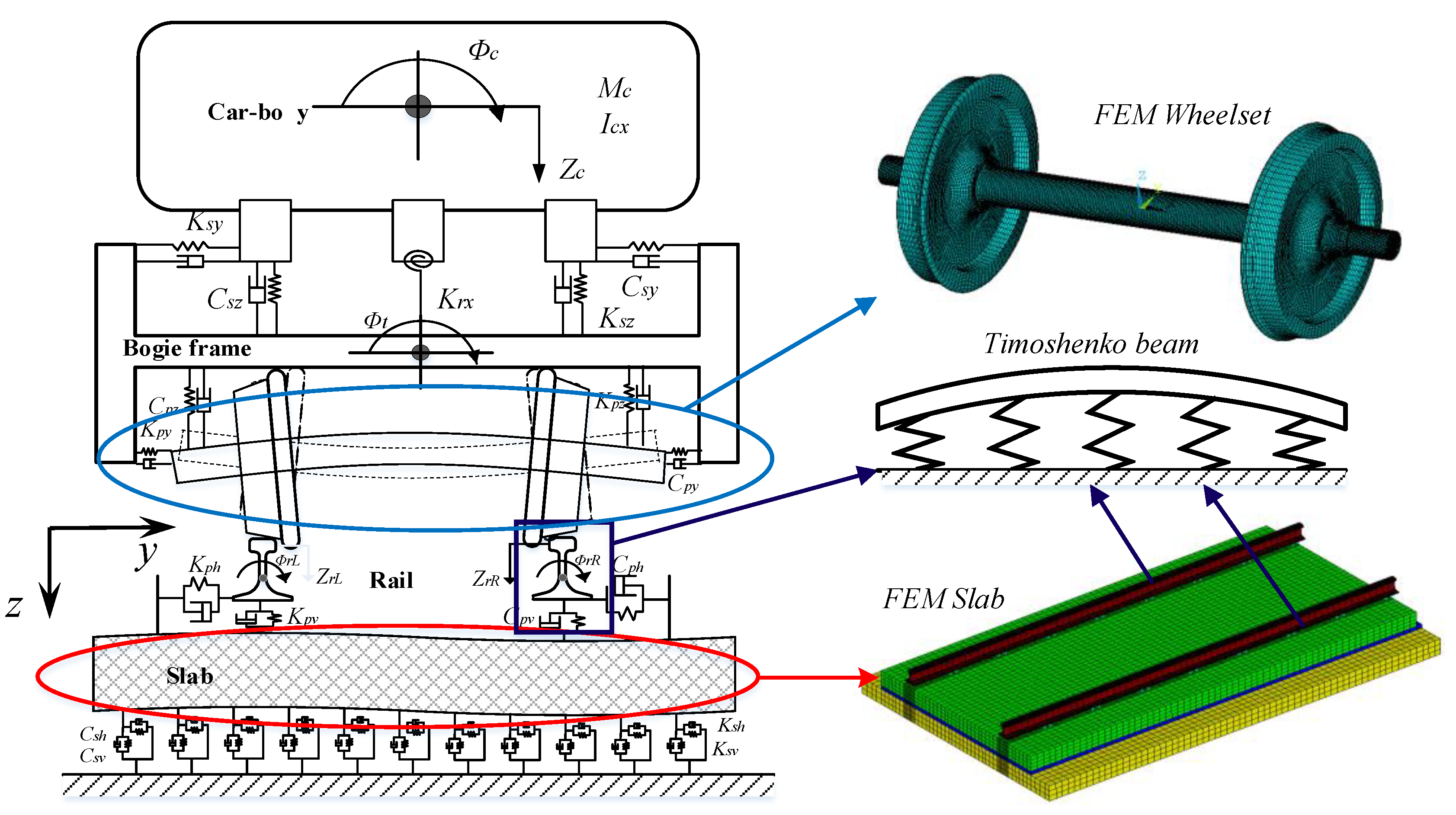
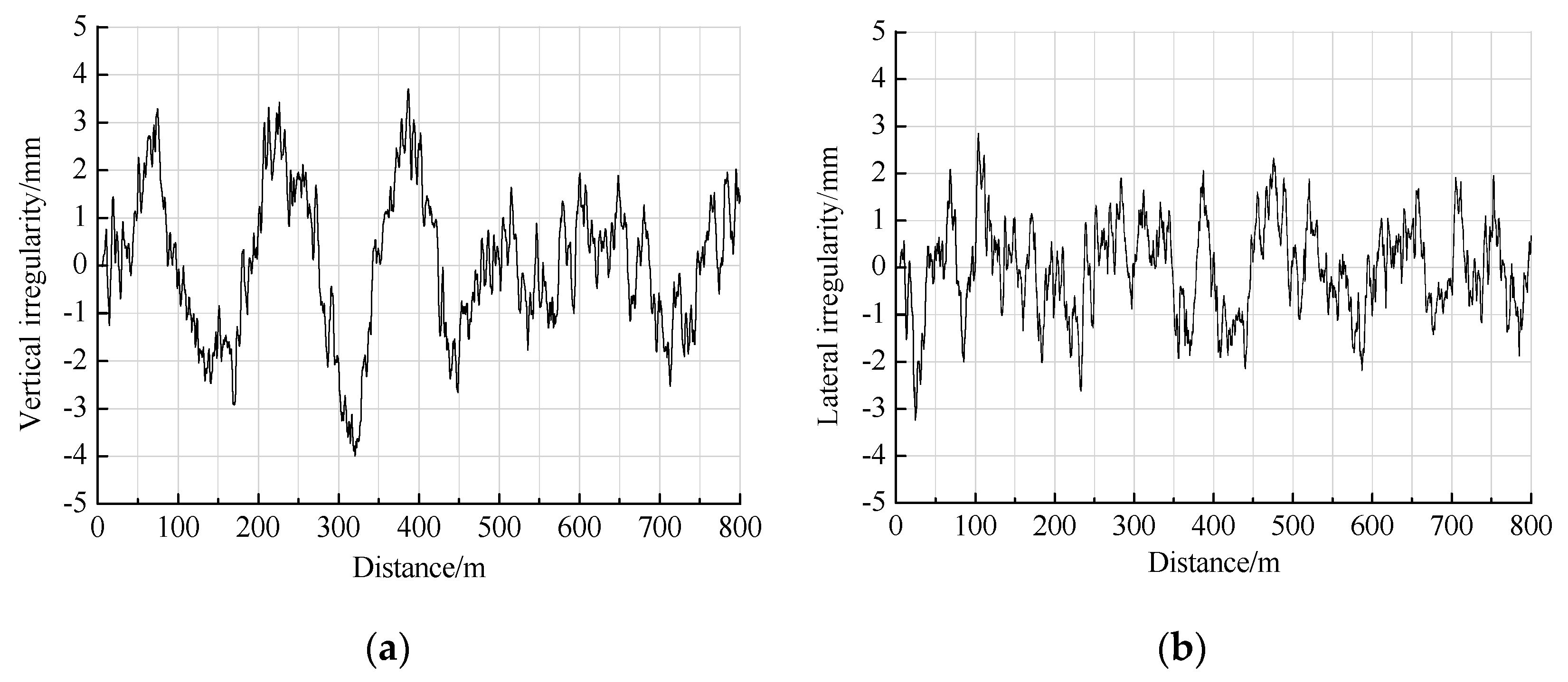
The numerical simulation uses the vehicle–track rigid–flexible coupling dynamical model described in
Section 3.1, and the track random roughness is used as an exciting input (
Figure 12a,b). The speed of the train is 300 km/h and the diameter of the wheel is 920 mm. The normal contact forces and creepages are calculated.
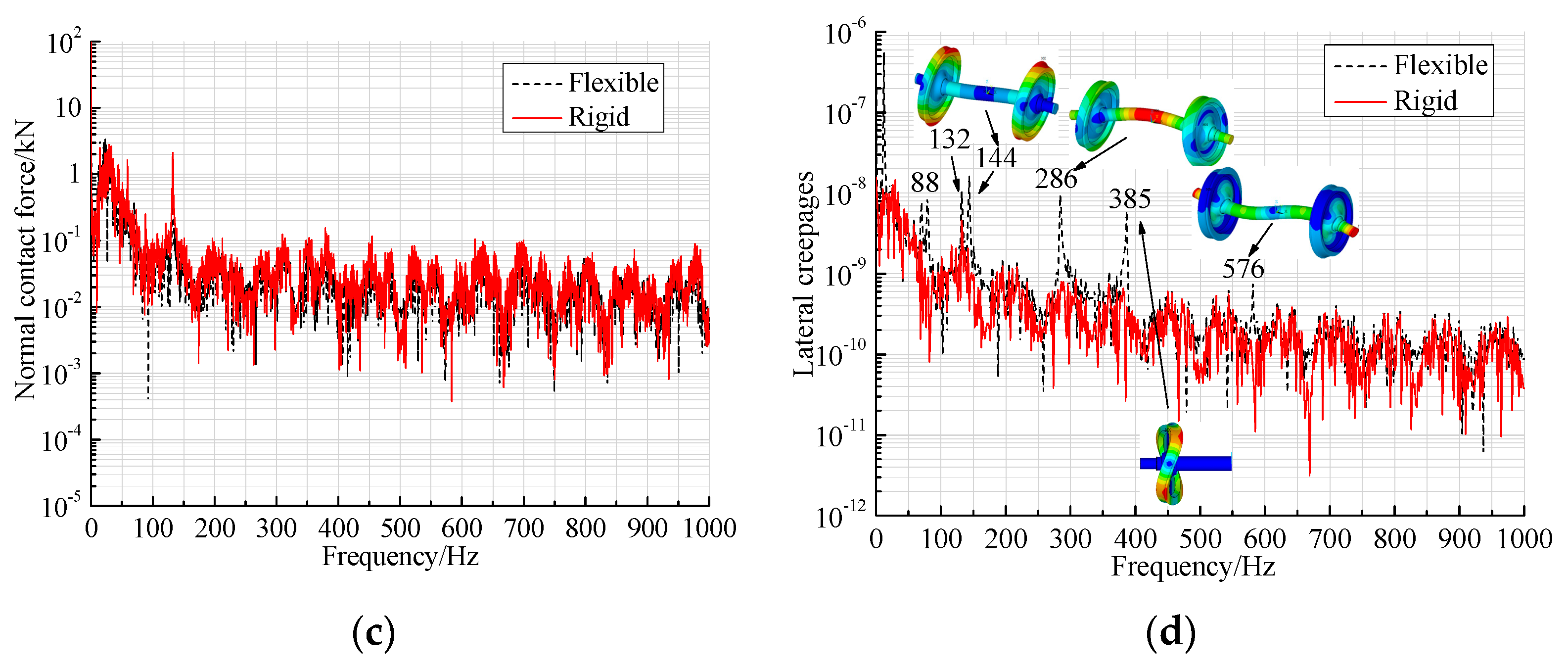
Figure 12c,d shows the comparisons of the calculated results for the flexible wheelset and the rigid wheelset in the frequency domain.
As shown in
Figure 12c, the normal force of the flexible wheelset is slightly smaller than that of the rigid wheelset in the considered frequency domain. The difference between the normal forces of the two types of wheelset models is relatively large at 132 Hz, which is the sleeper passing frequency.
Figure 12d shows the obvious peaks of the lateral creepages at approximately 88, 132, 144, 286, 385, and 576 Hz, and there are large differences between the flexible and rigid wheelset at these frequencies. The flexible wheelset modes of 88, 144, 286, 385, and 576 Hz need to have remarkable contribution to the polygonal wear corresponding to the peaks. However, the tested results in
Section 1 show that the dominant polygonal wear are in the 18th to 20th order, which are related to 576 Hz. Therefore, the numerical simulation of the present paper focuses on the influence of the wheelset vibration mode of 576 Hz only and the other modes (88, 144, 286, and 385 Hz) are excluded in the simulation program when calculating polygonal wear.
The wear model described in
Section 3 is used to calculate the wear loss along the circumference of the wheel with 50 circles rolling. In the calculation, the track random roughness is used as an exciting input.
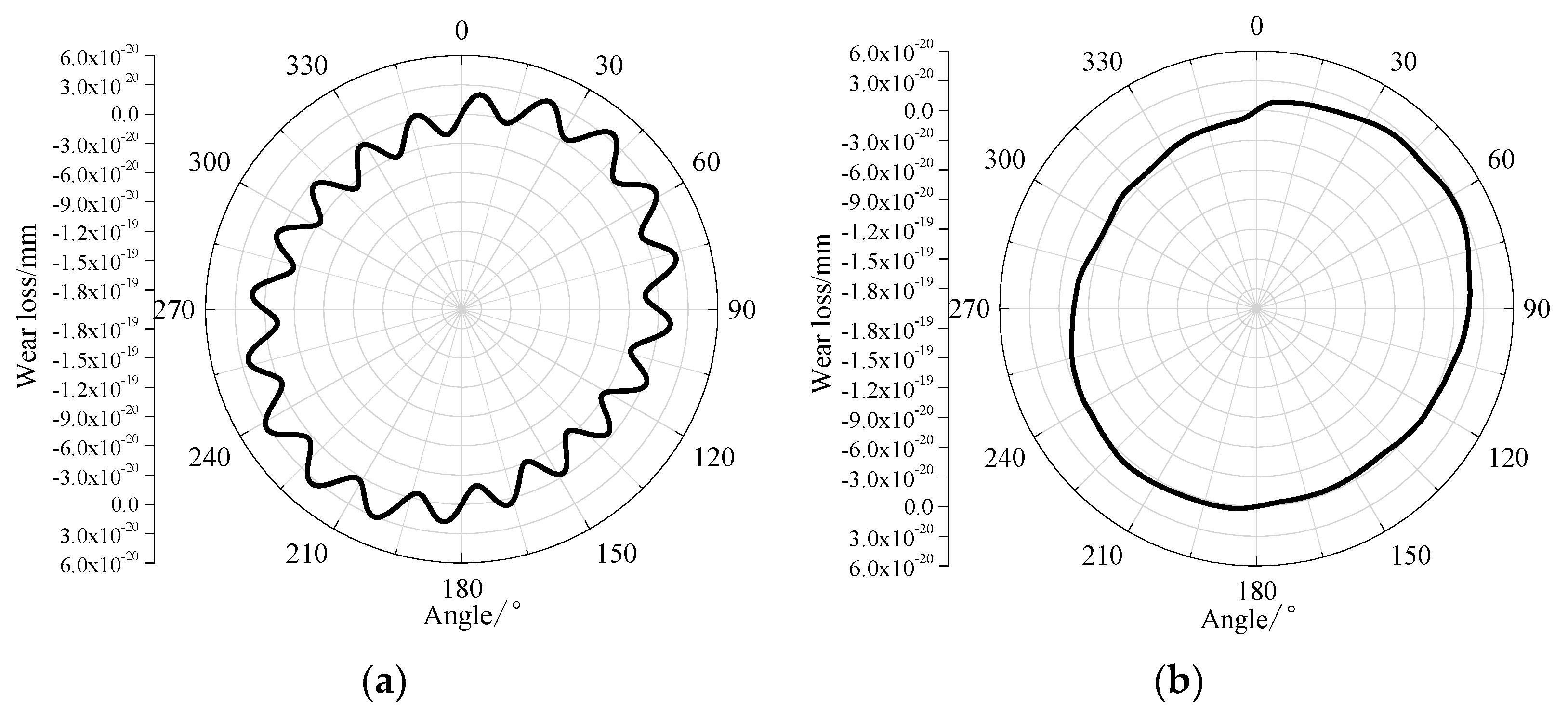
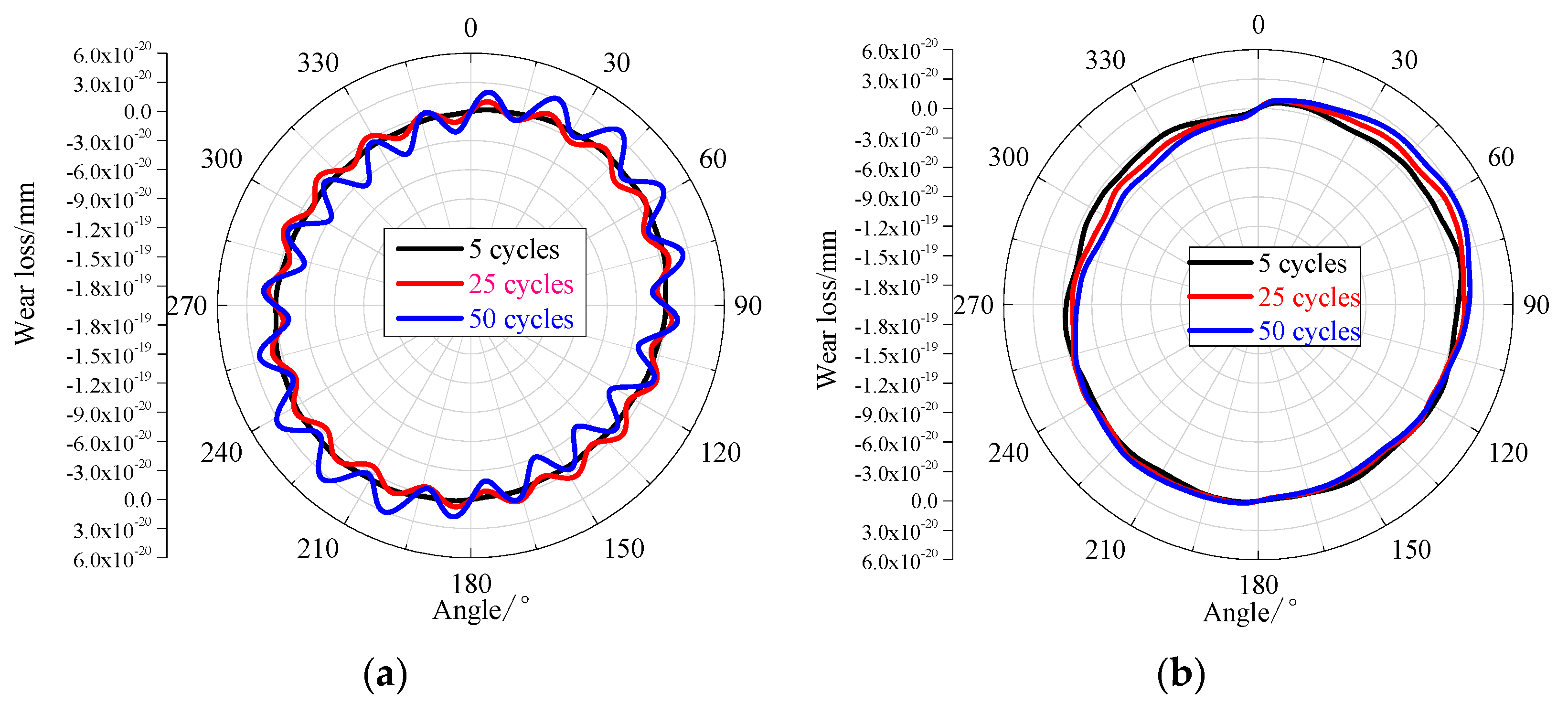
Figure 13a,b show the calculated results of the wear loss along the circumferences of the two wheels with 50 rolling circles. One is a flexible wheelset and the other is a rigid wheelset.
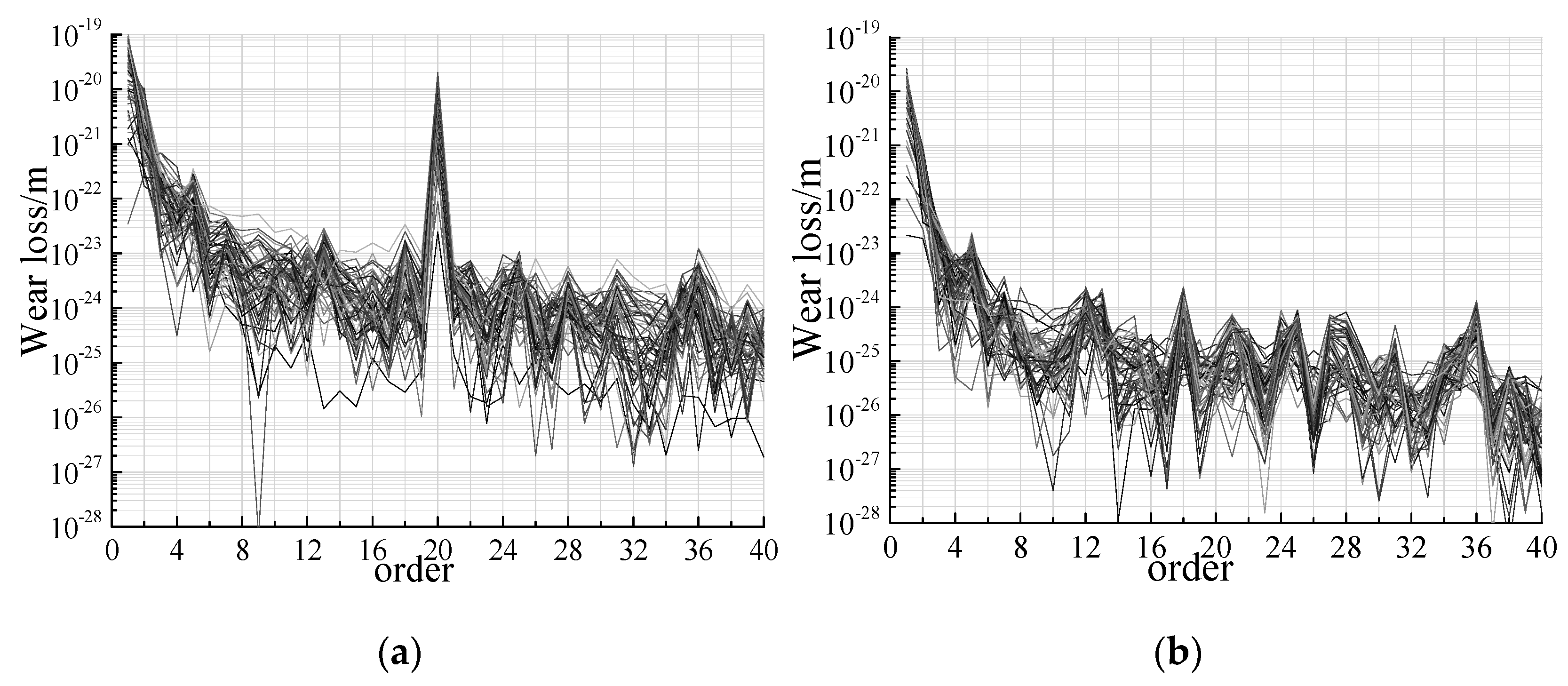
Figure 14a,b indicate their irregularity spectra corresponding to
Figure 13a,b, respectively. From the calculated result, it is found that the flexible deformation of the wheelset either greatly contributes or leads to polygonal wear generation.
Note that
Figure 12d shows the peaks of the lateral creepage at 88, 132, 144, 286, 385, and 576 Hz. Furthermore, the wheel circumference is approximately within the integral multiples of the wavelengths of the vibration at 144, 286, and 576 Hz, at 300 km/h and at the 920 mm wheel diameter. This is a basic condition for the generation of polygonal wear at 144, 286 and 576 Hz. The polygonal wear of the corresponding 5th, 10th, and 20th orders should start at the same time and develop quickly. However, the calculated result, as shown in
Figure 14a, does not show the polygonal wear of the 5th and 10th orders. It is apparently contradictory when comparing
Figure 12d with
Figure 14a. In fact, the polygonal wear of 5th and 10th orders can contribute prominently if all bending modes of the wheelset are considered for calculating polygonal wear. However, the test results, as shown in
Figure 15, indicate the dominant order of only 20, and its corresponding passing frequency is close to 576 Hz at a speed of 300 km/h and at a diameter close to 920 mm.
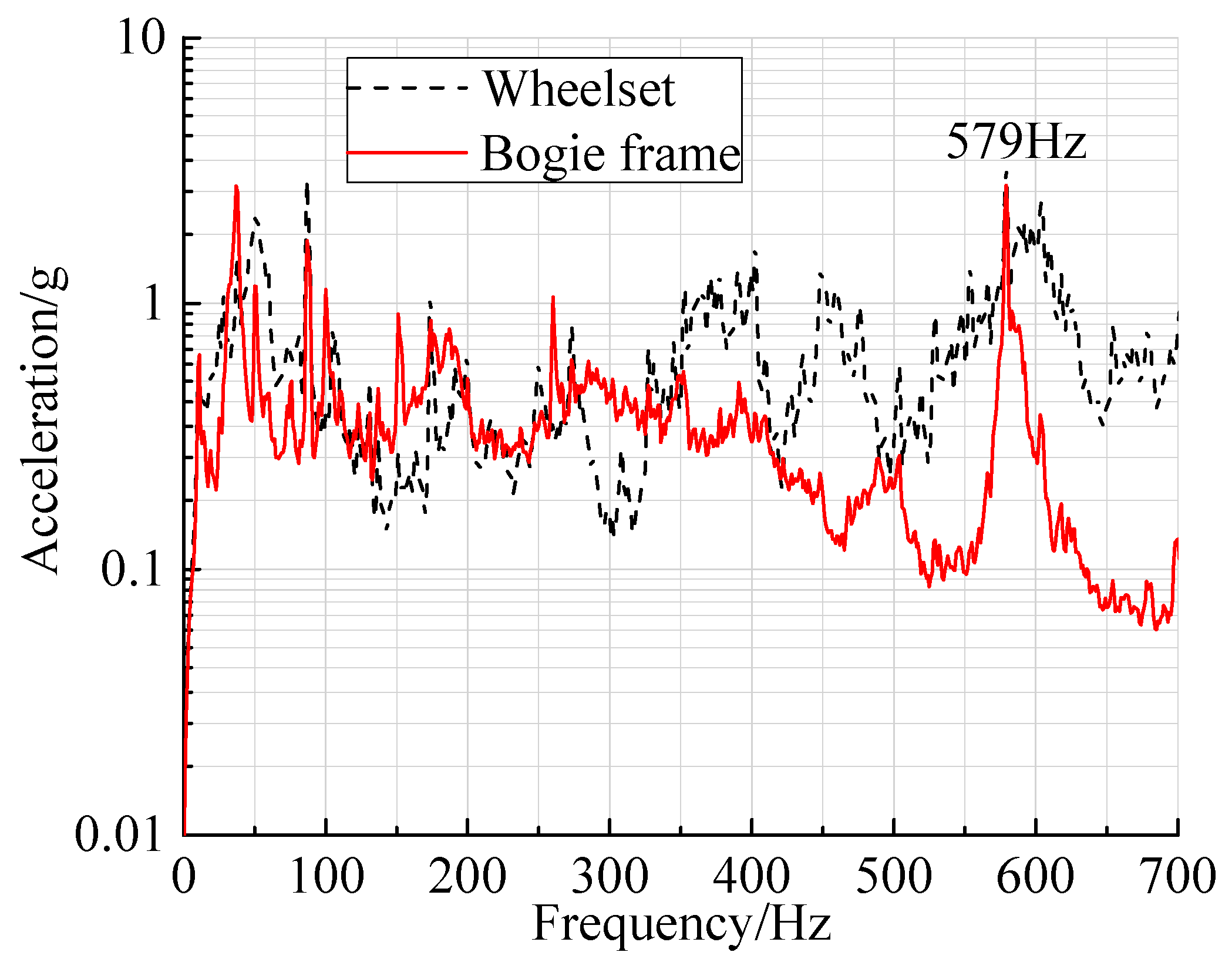
Figure 15 shows the typical site test results.
Figure 15 shows the lateral vibration acceleration spectra of the wheelset bearing box and bogie frame above the primary suspension when the train is running at 300 km/h after wheel re-profiling (no polygonal wear exists). The result of the wheelset indicates that, in the actual running condition, the vibration level of the wheelset in the frequency band of 550–600 Hz is more significant than that in other frequency bands. This implies that the mode of the wheelset at 576 Hz is excited when the train is running. Furthermore,
Figure 15 shows that the vibration of the bogie frame at ~579 Hz (close to a wheelset mode frequency of 576 Hz) is as dominant as that of the wheelset. In such a scenario, the 20th-order polygonal wear was initiated and developed quickly. Then, at frequencies of ~144 Hz and 286 Hz, the uncoupling vibration of the wheelset and bogie probably occurred, or other resonances at frequencies near them occurred, as shown in
Figure 15. This situation could disturb or suppress the polygonal wear of the 5th and 10th orders. However, this is conjecture that can be verified by improving the present theoretical model. The current model cannot account for the effect of the bogie resonances and the frequency dependent characteristics of the suspension. Thus far, to emphasise the influence of the wheelset mode of 576 Hz, the effect of other modes was intentionally neglected in the calculation using the less advanced model.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















