Study on the Vibration Active Control of Three-Support Shafting with Smart Spring While Accelerating over the Critical Speed


Abstract
:1. Introduction
2. Research on Vibration Reduction of the Shaft System with Fixed Control Force Applied by Smart Spring
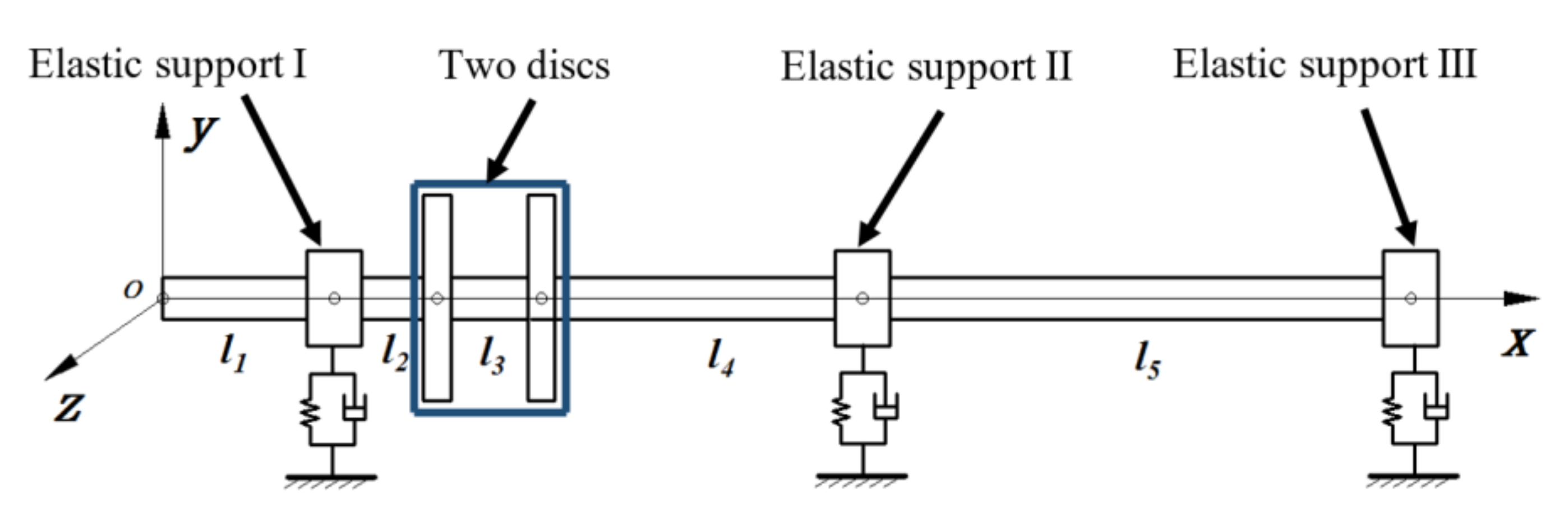
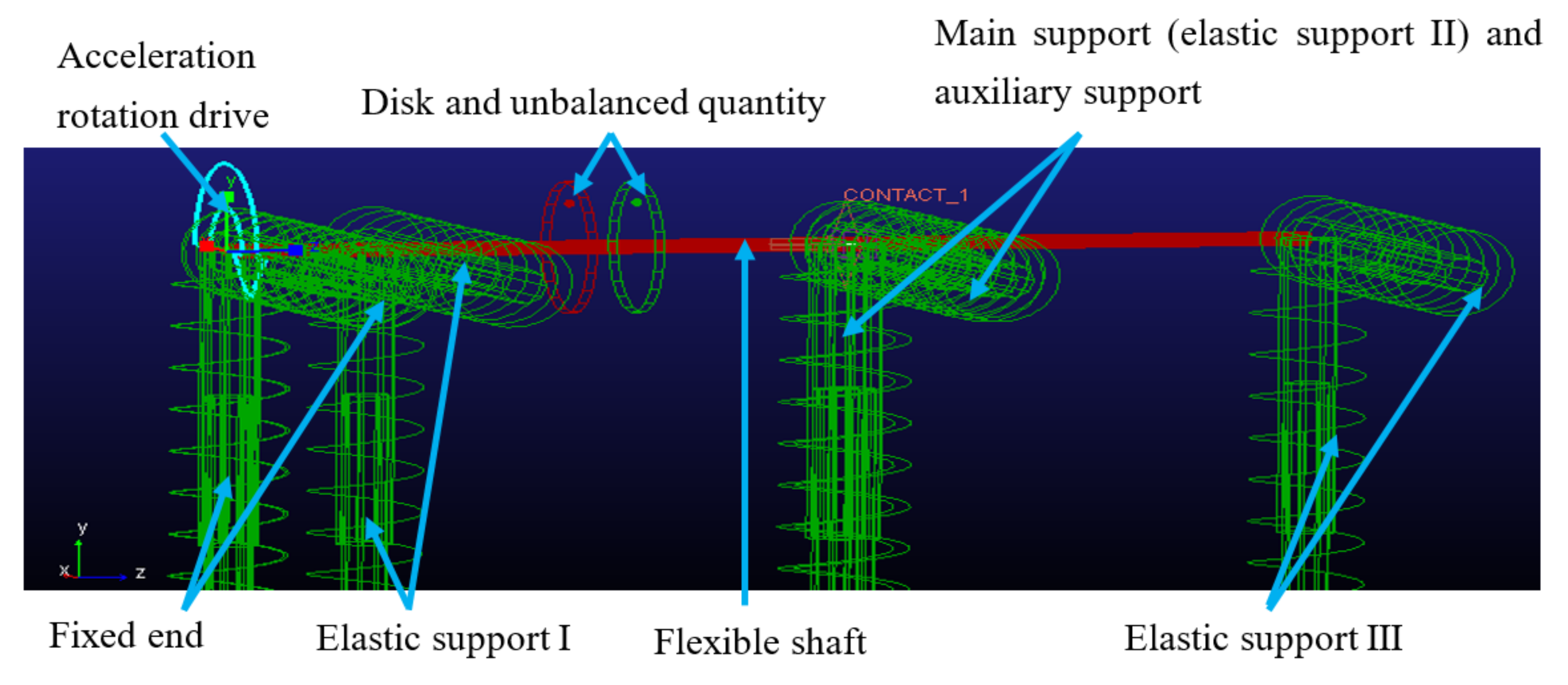
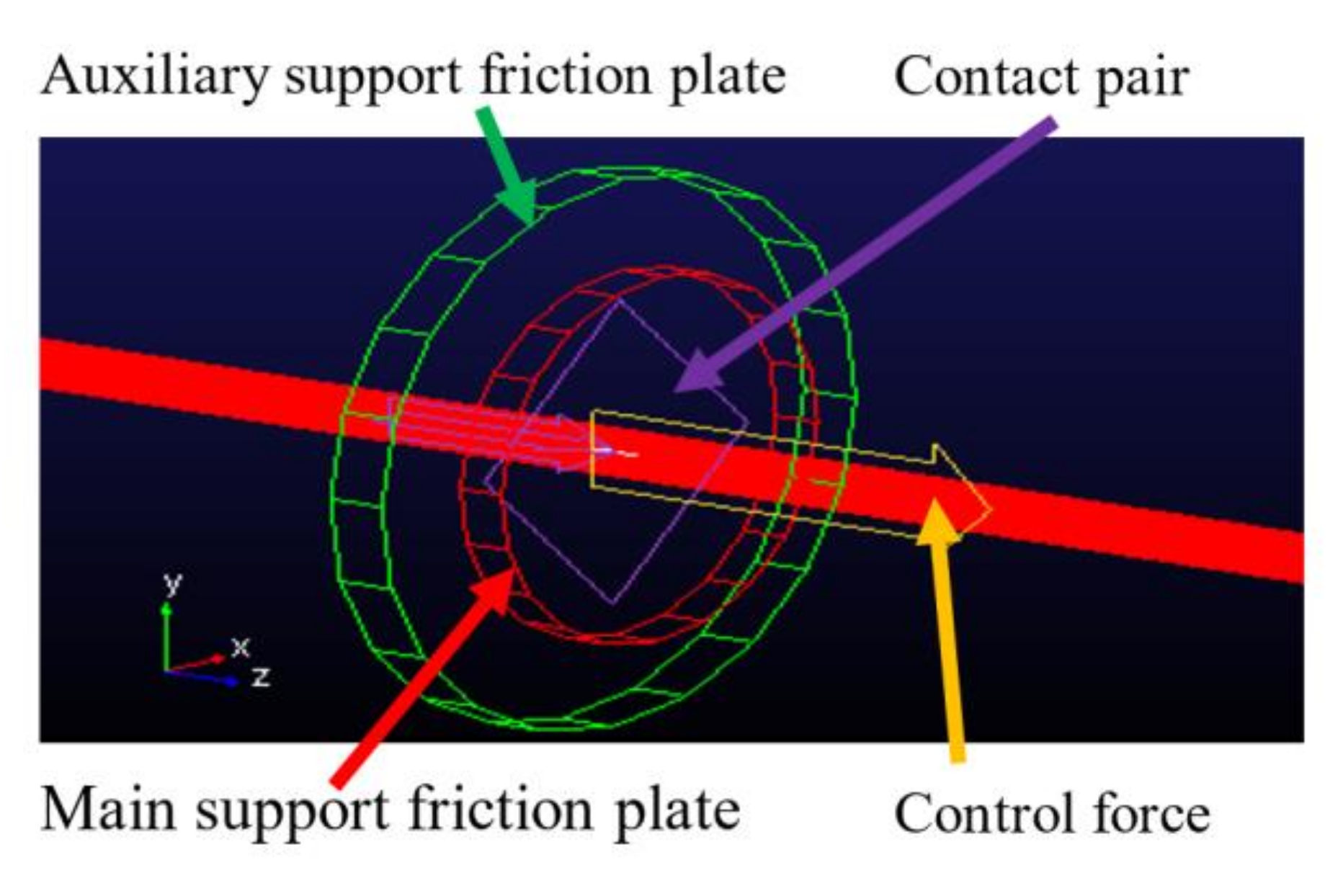
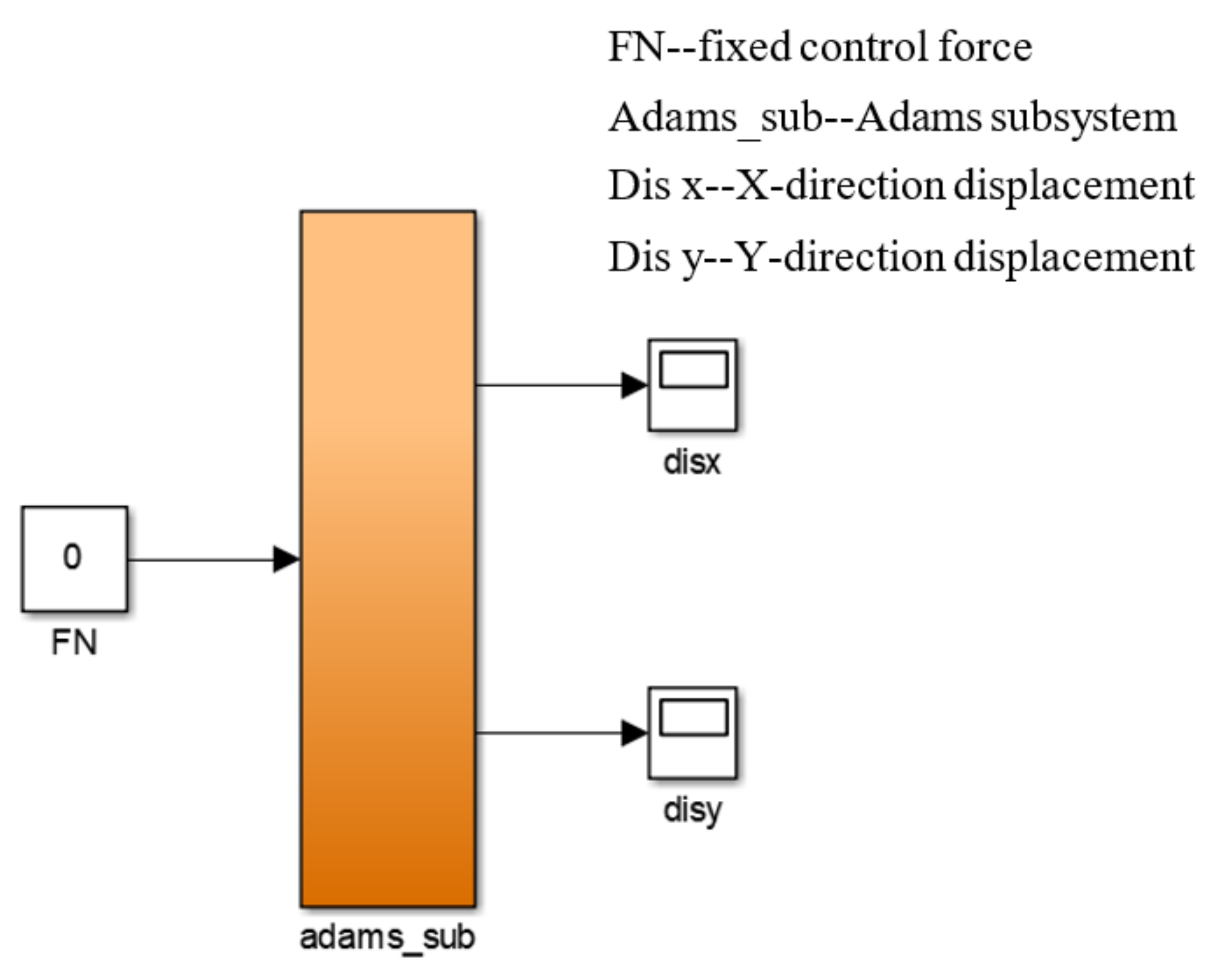
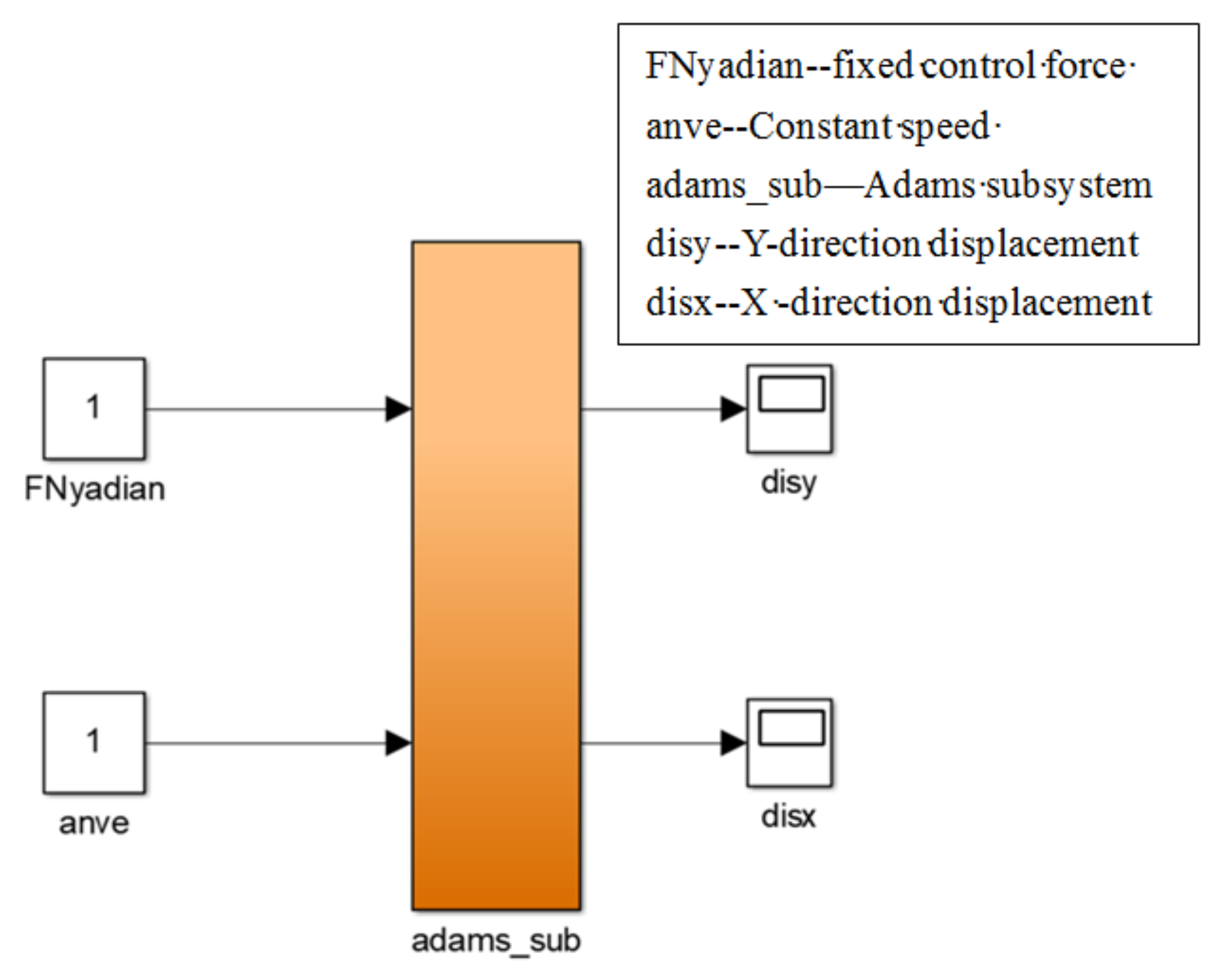
2.1. Establishment of Joint Simulation Model of Three-Support Shafting Based on ADAMS and MATLAB
2.2. Analysis of Simulation Results of Shafting Over-Critical
3. Experimental Verification of Shaft System Over-Critical Vibration Control
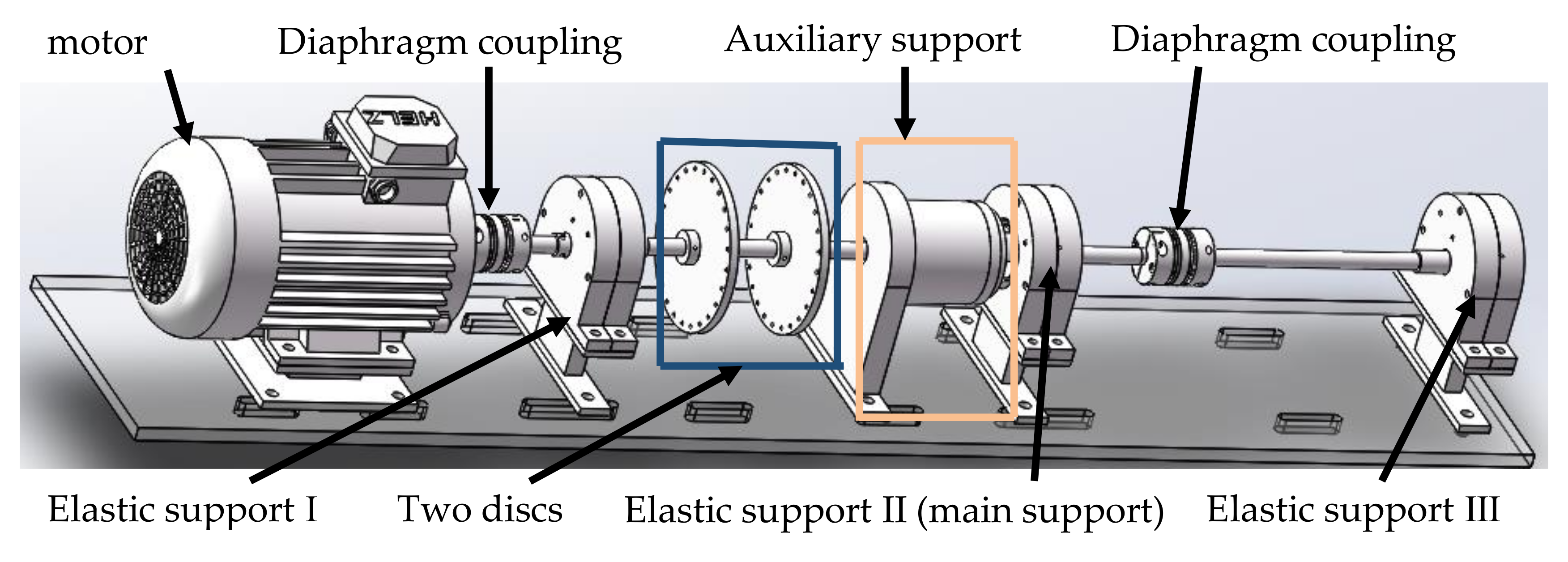
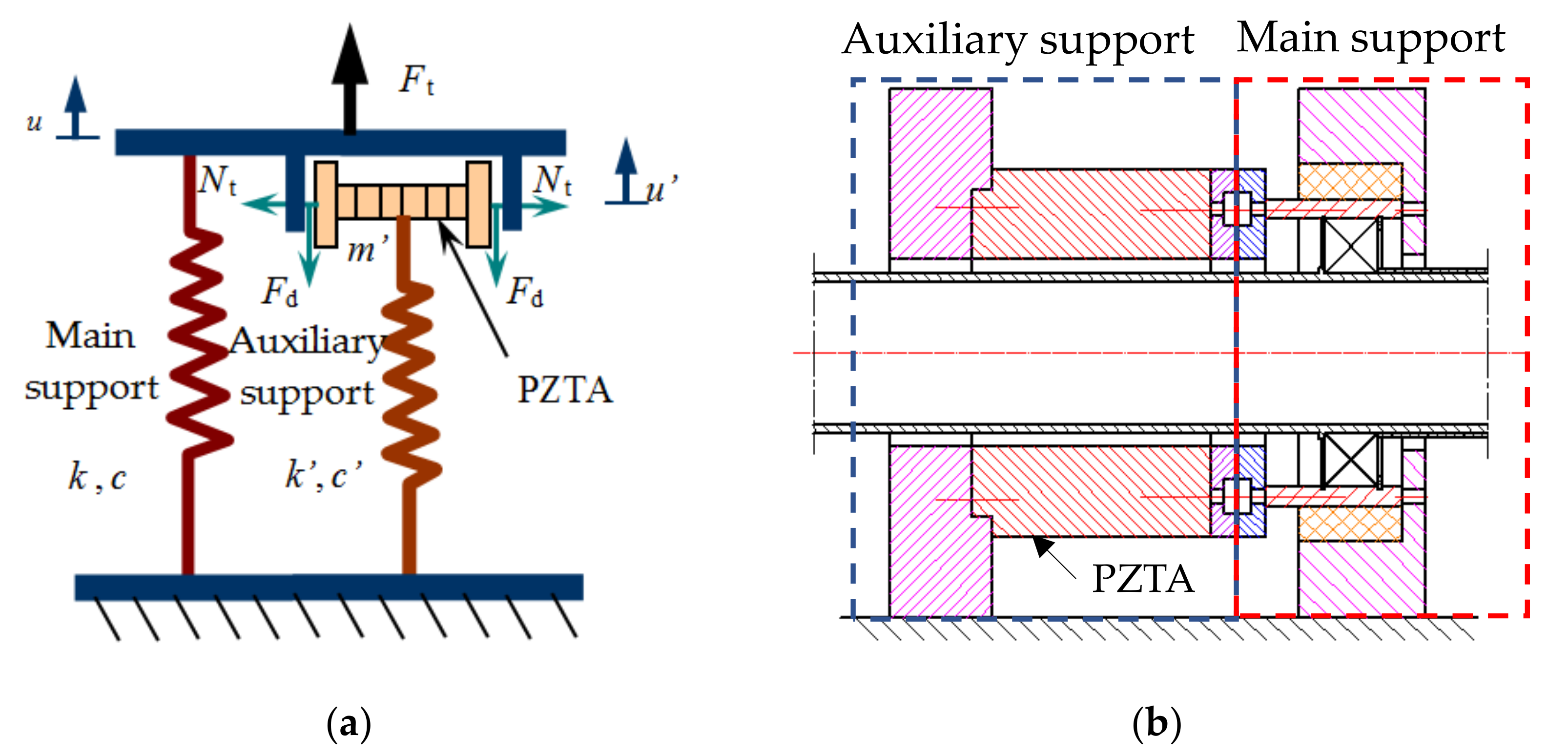
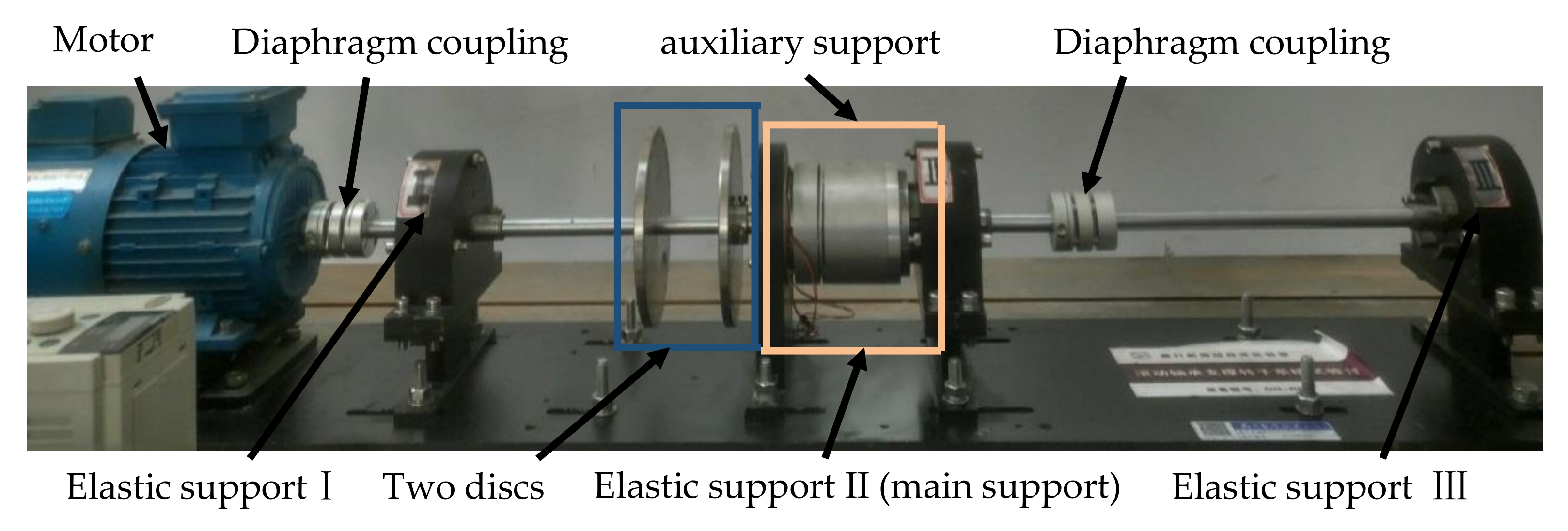
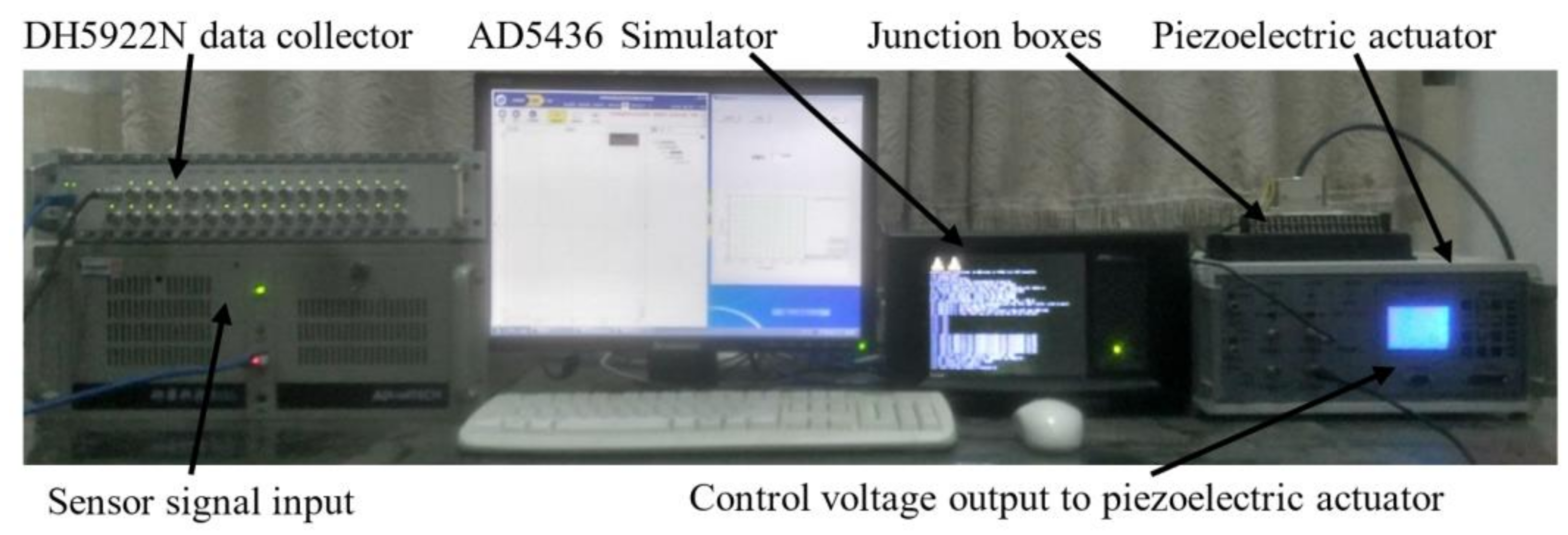
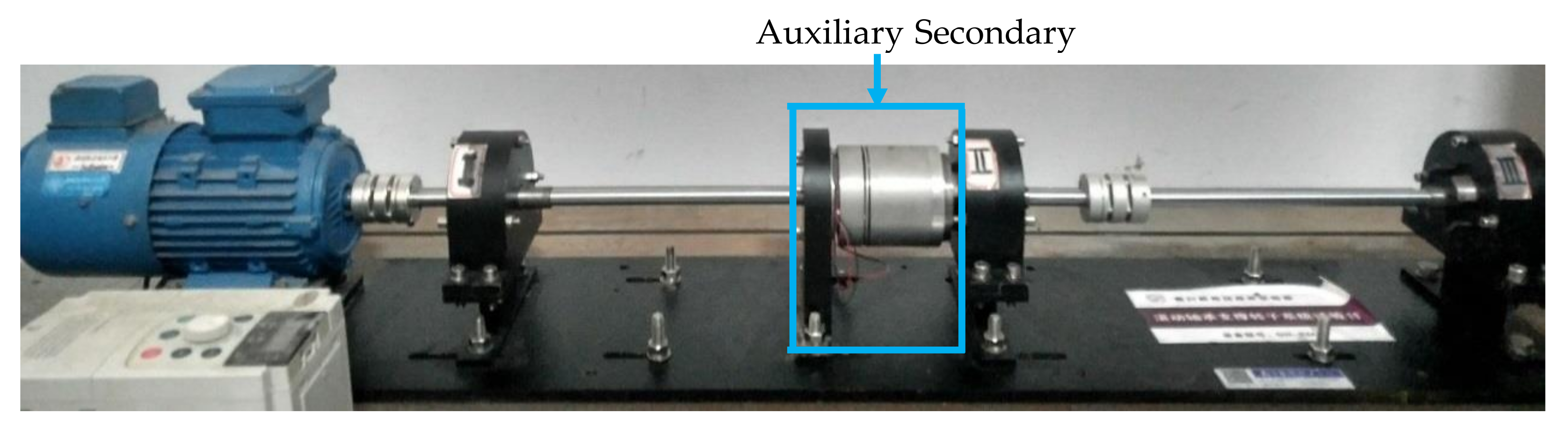
3.1. Design of Test System
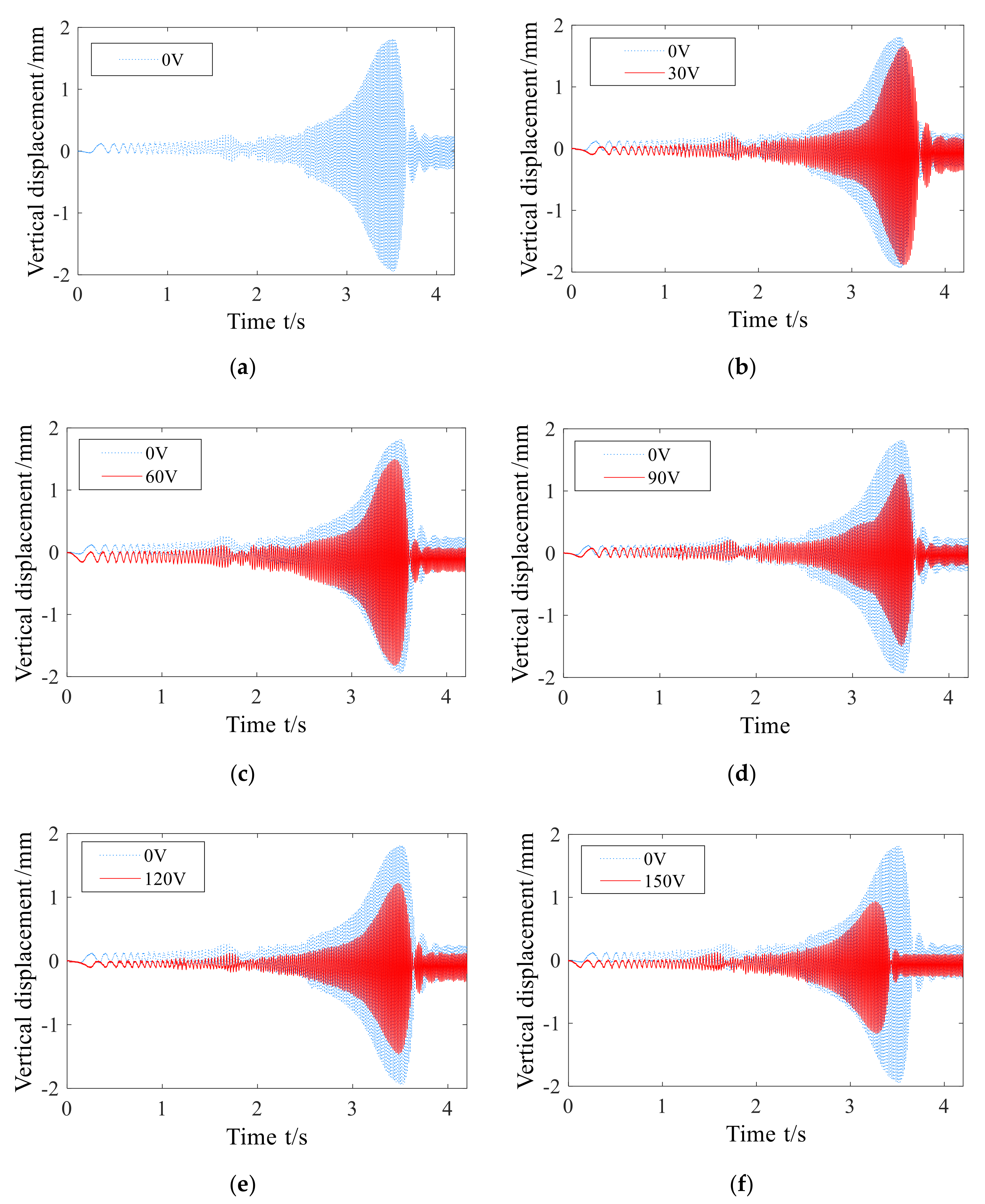
3.2. Analysis of Experiment Result
4. Research on Vibration Reduction of Shafting with Function Control Force Exerted by Smart Spring
4.1. Establishment of Simulation Model of Three-Support Shafting with Smart Spring
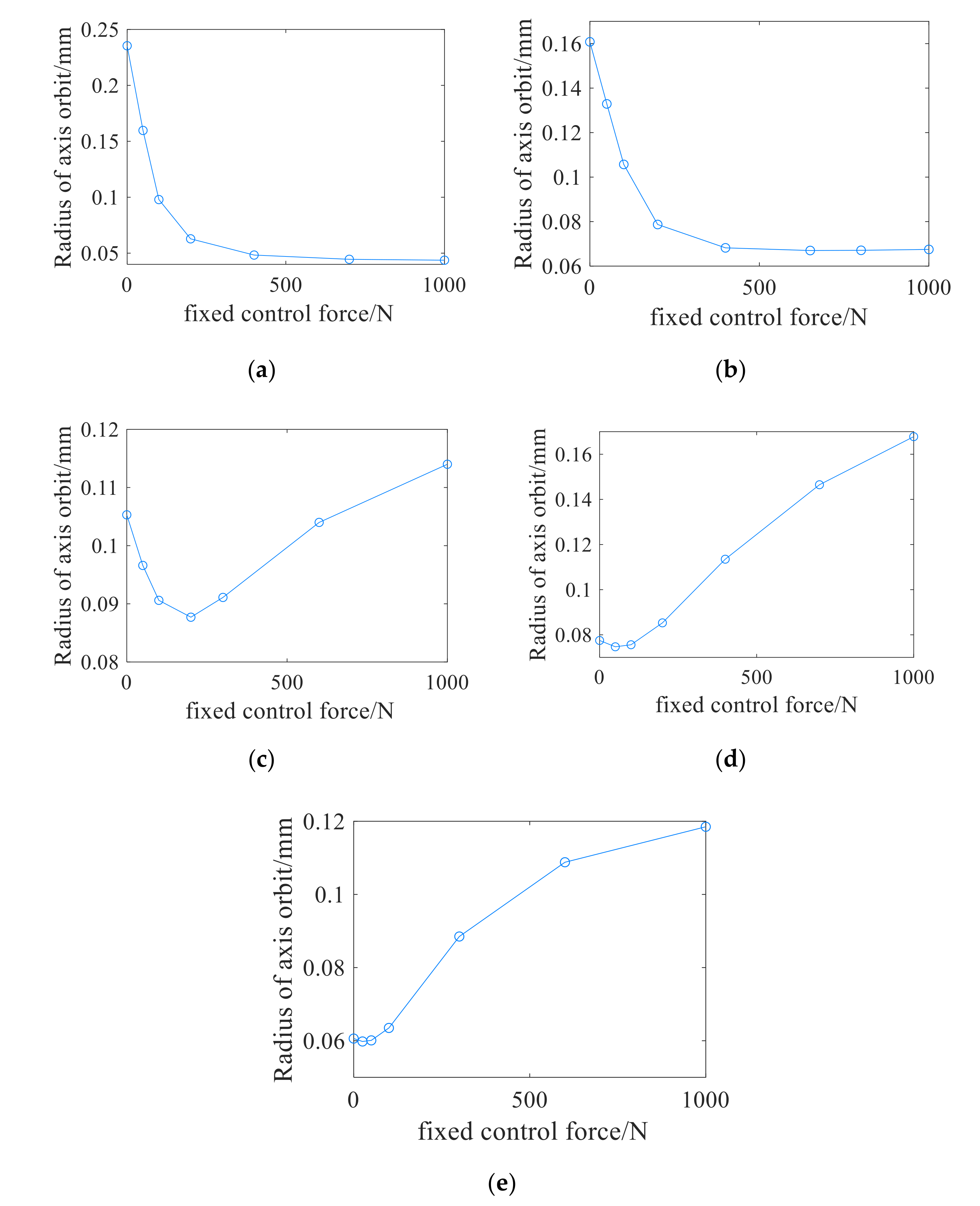
4.2. Determination of Optimal Fixed Control Force at Constant Speed
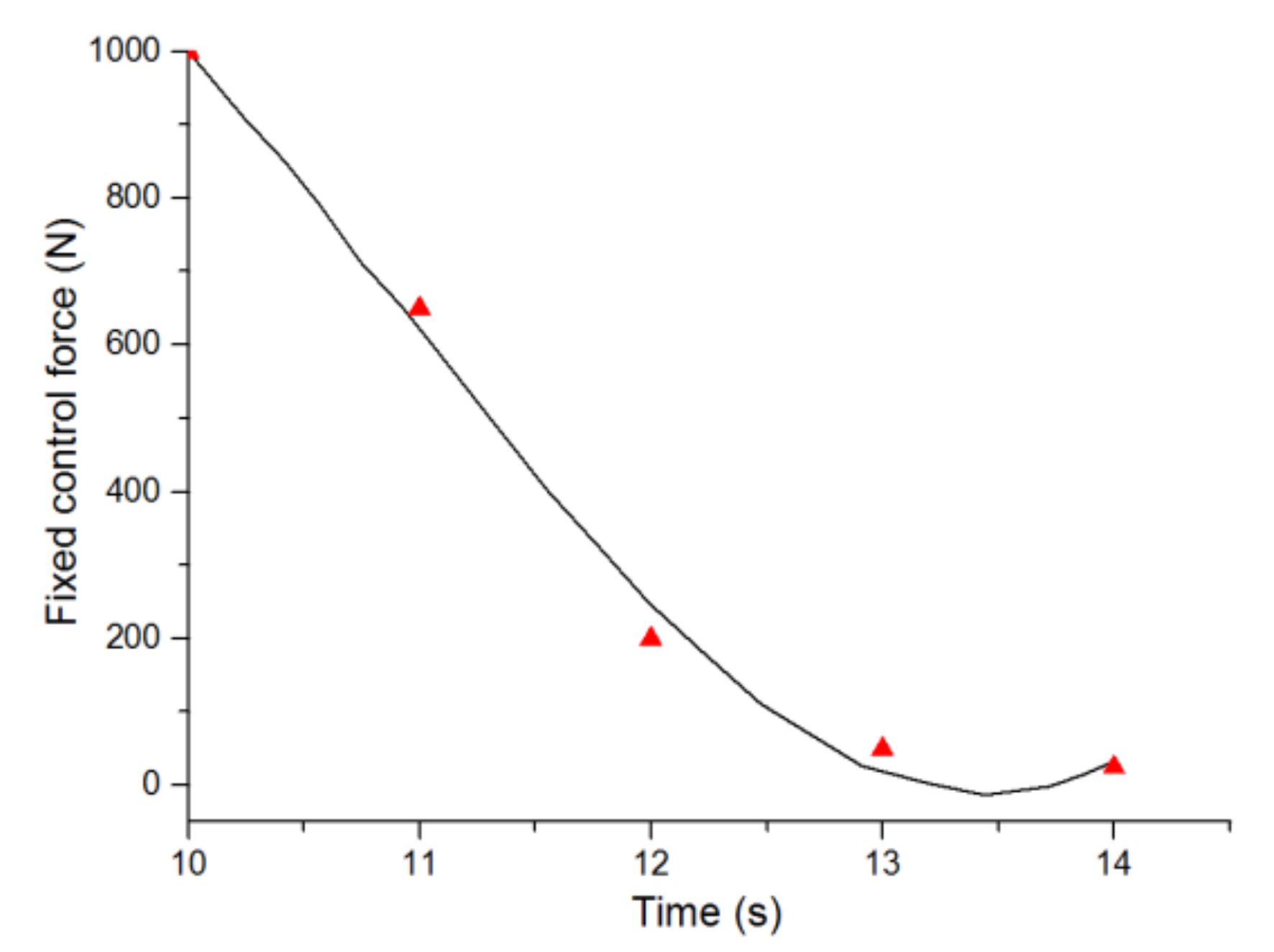
4.3. Polynomial Fitting of Function Control Force
4.4. Analysis of Simulation Results of Supercritical
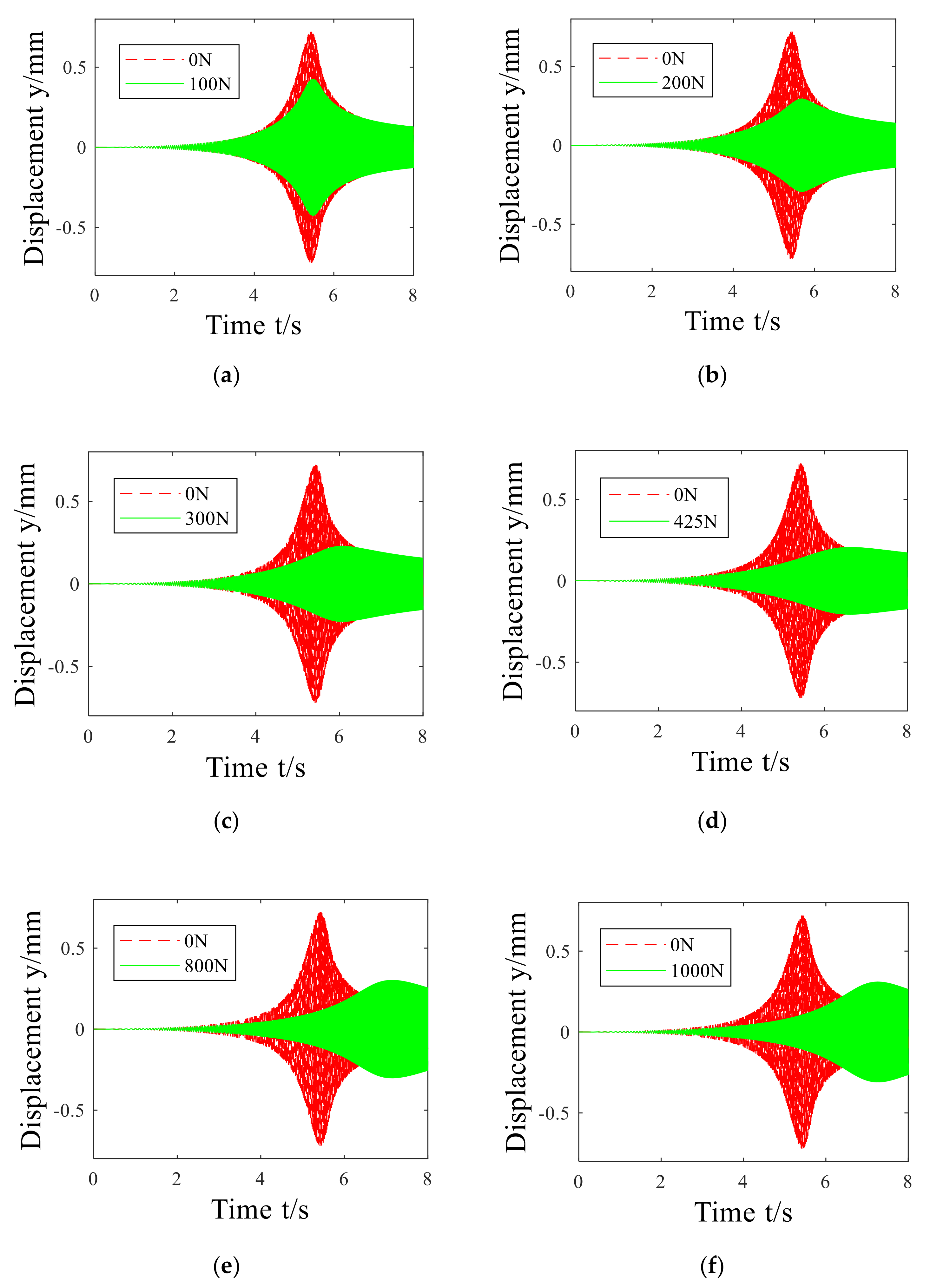
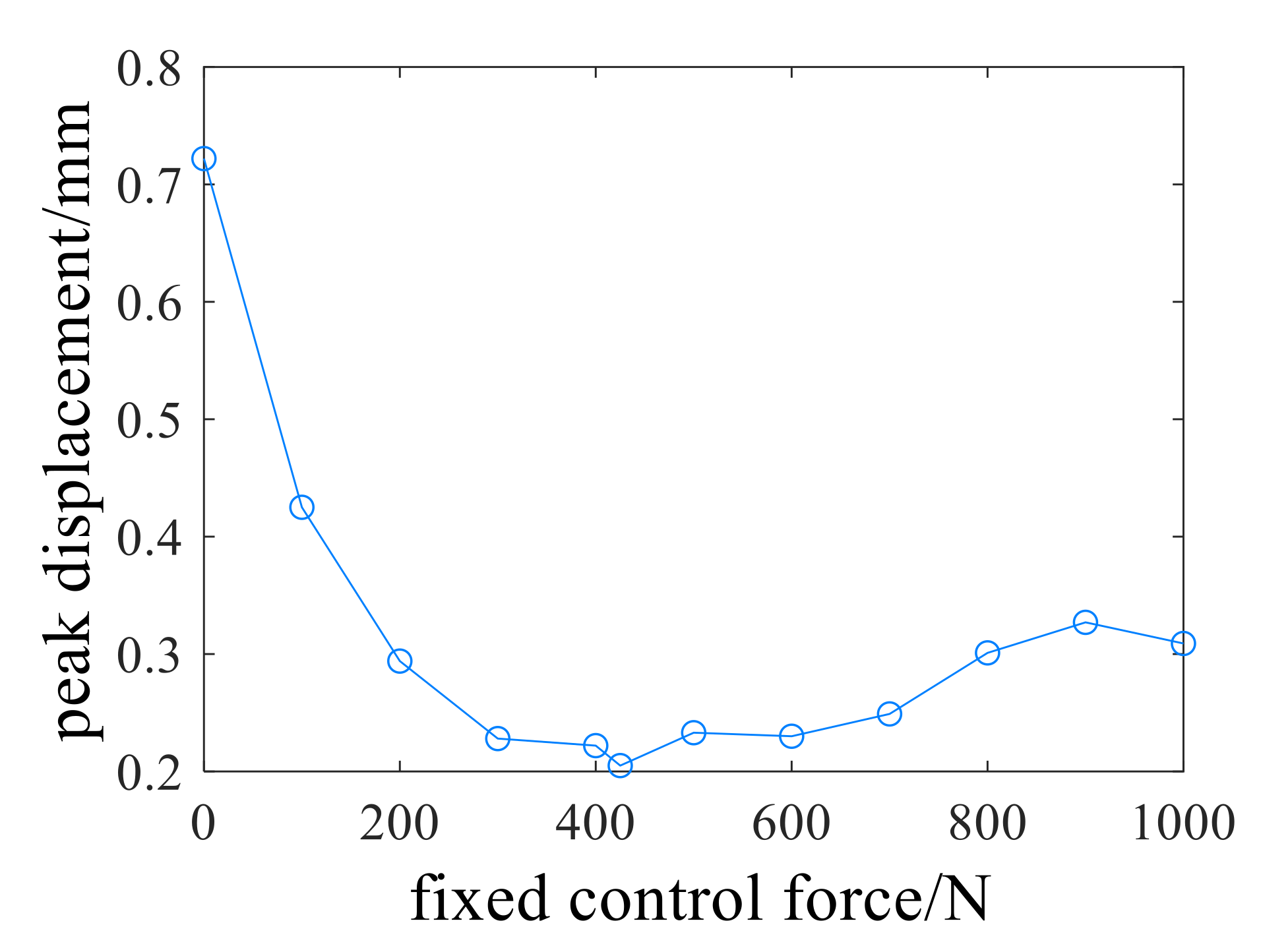
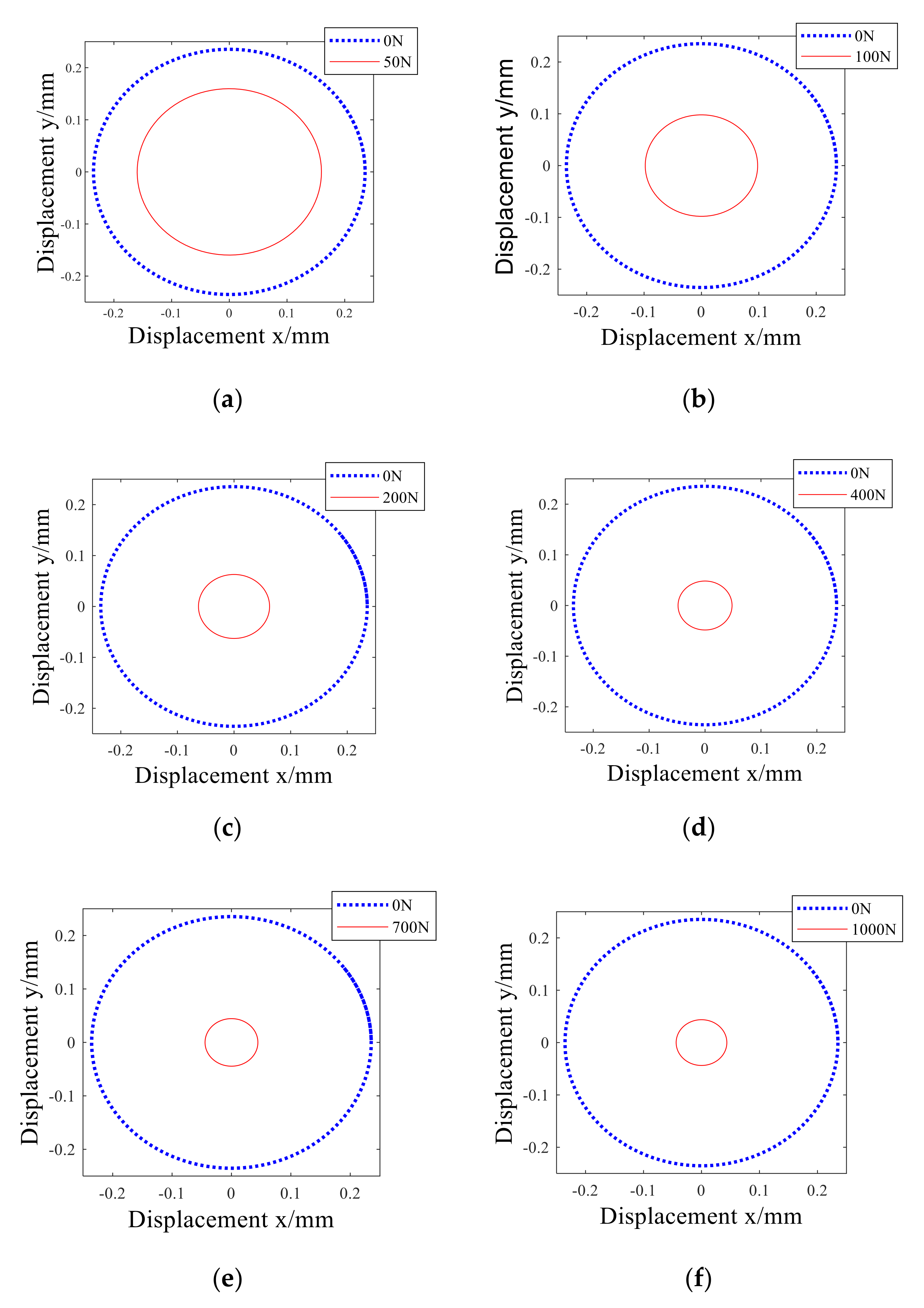
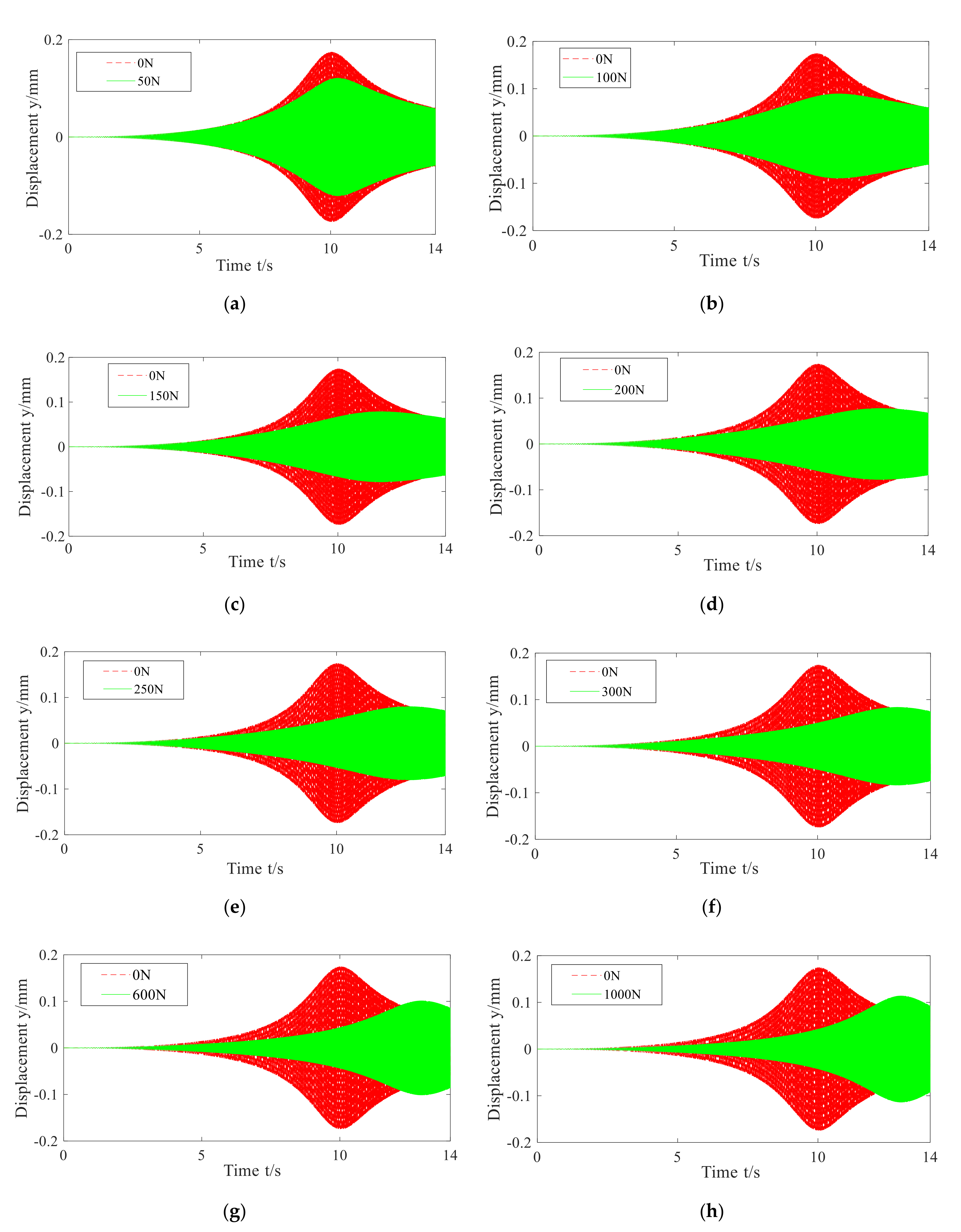
4.4.1. Analysis of Simulation Results of Over-Critical with Fixed Control Force
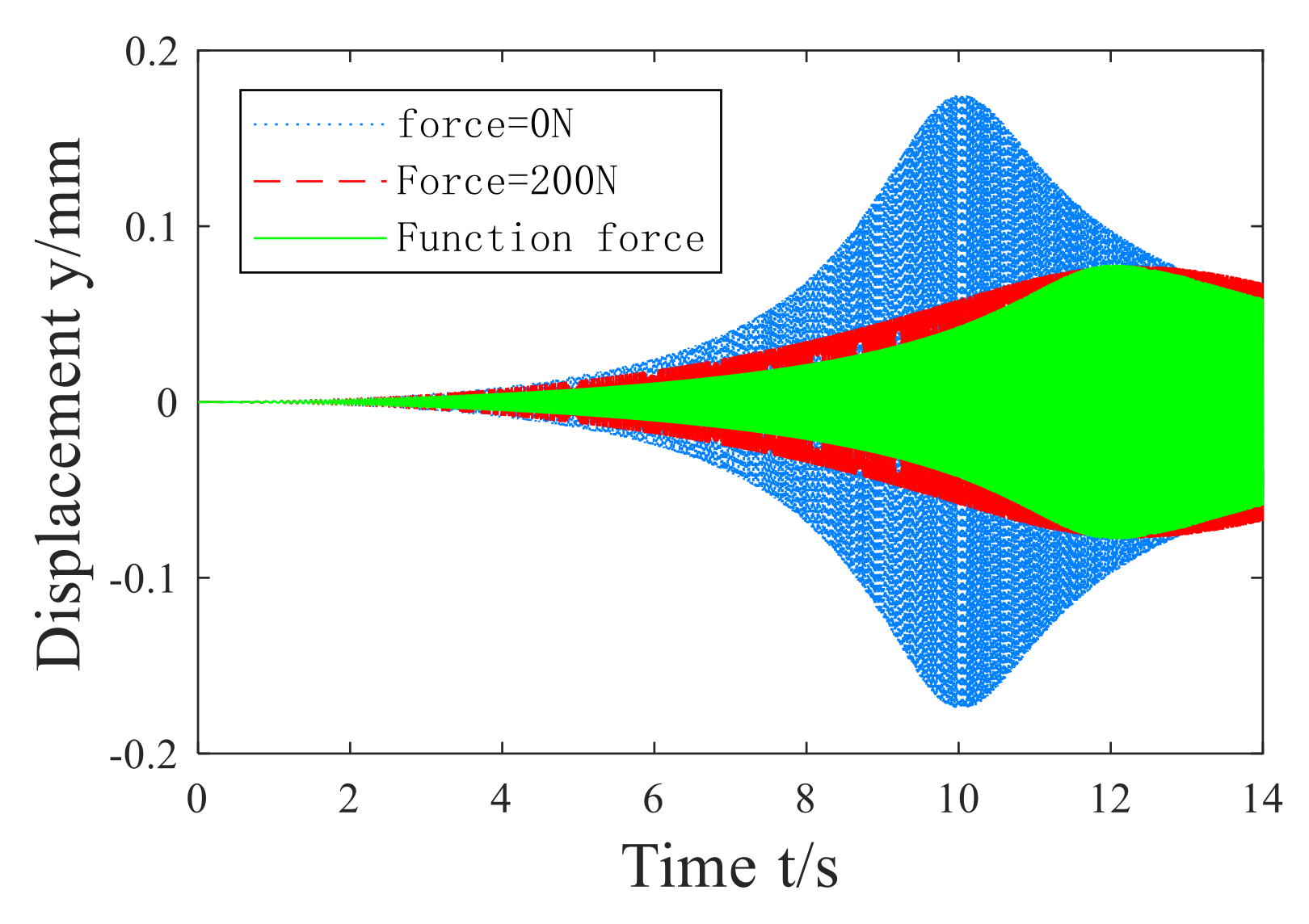
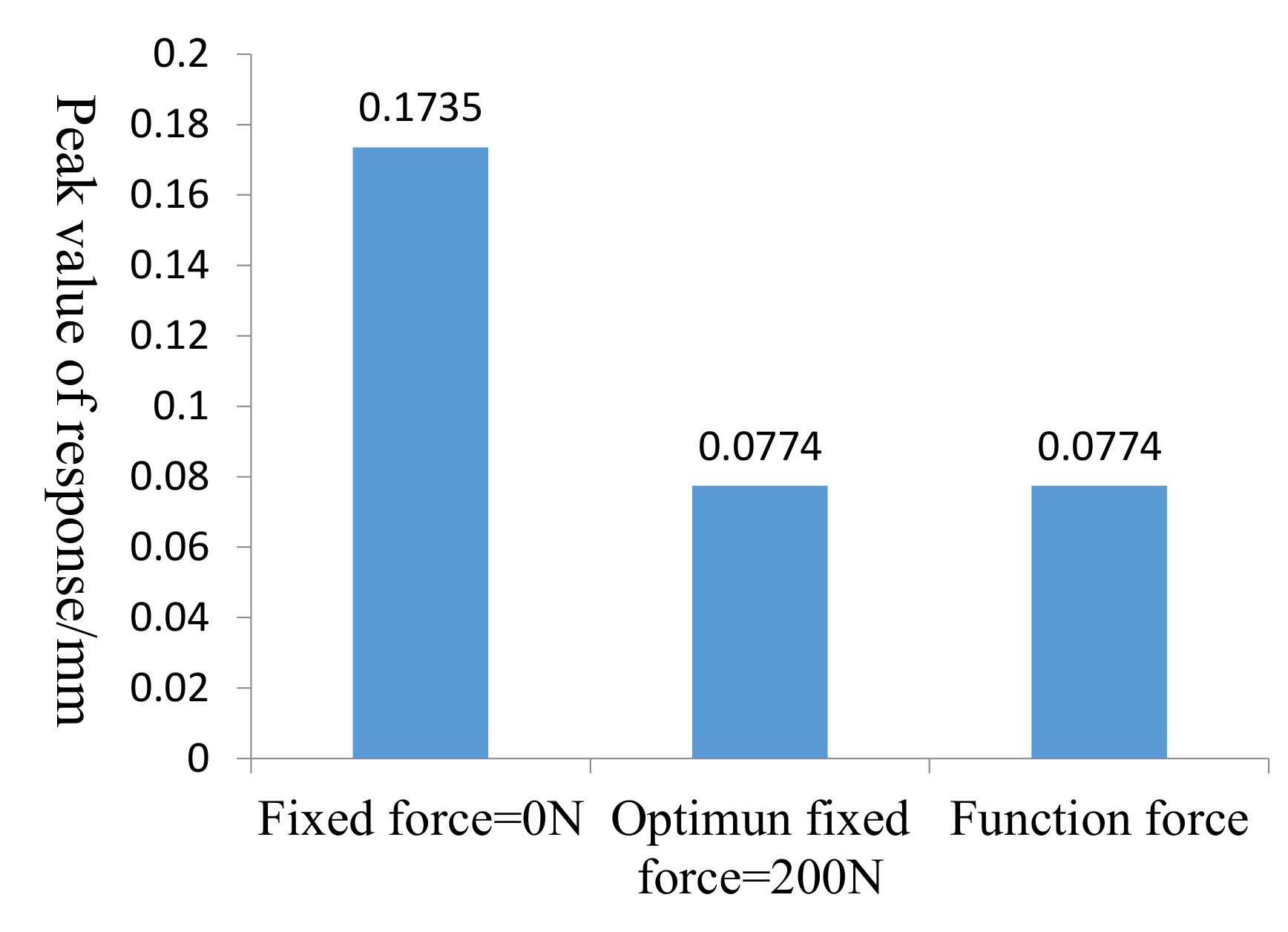
4.4.2. Analysis of Simulation Results of Applying Function Control Force Over-Critical
5. Conclusions
- (1)
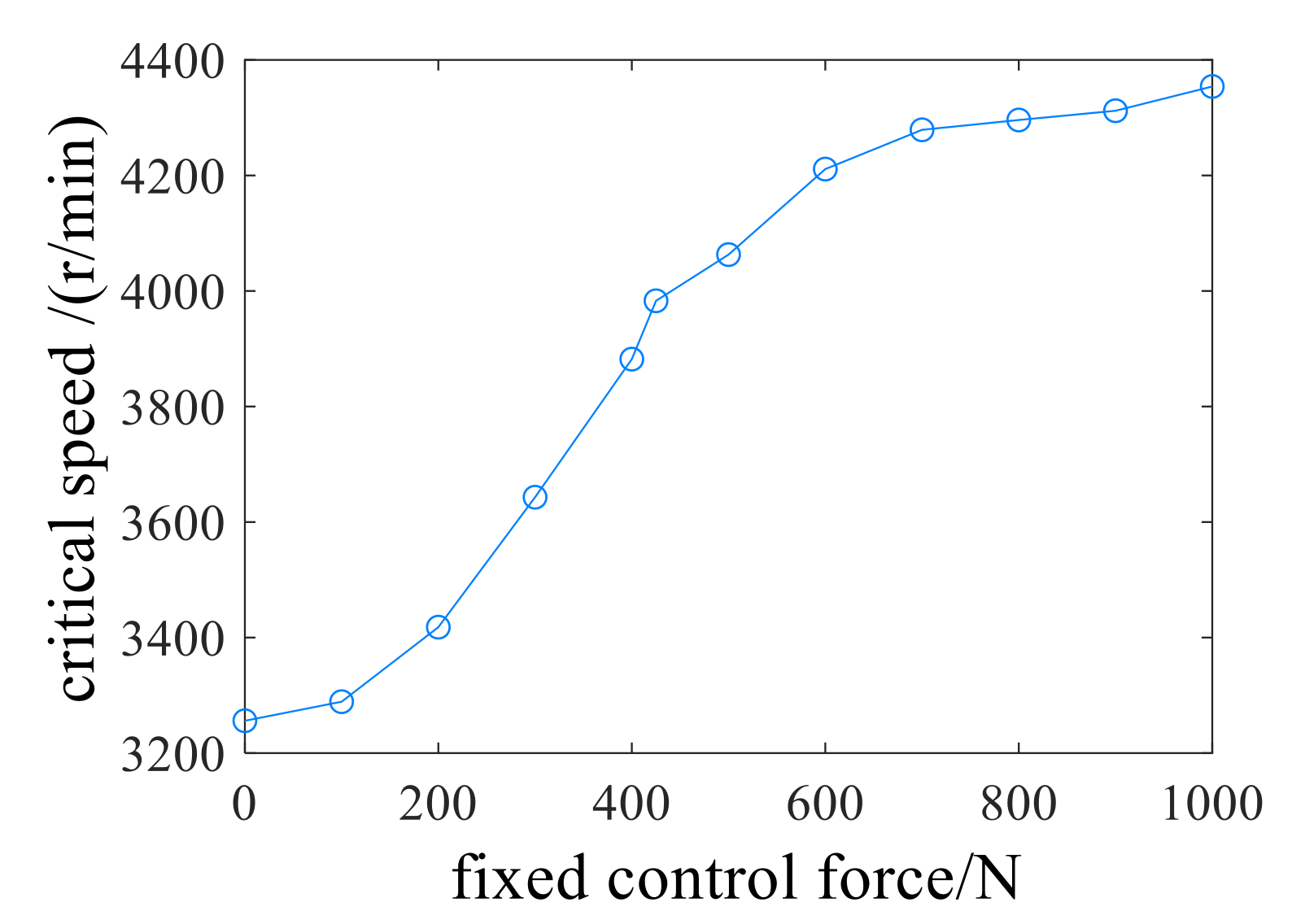
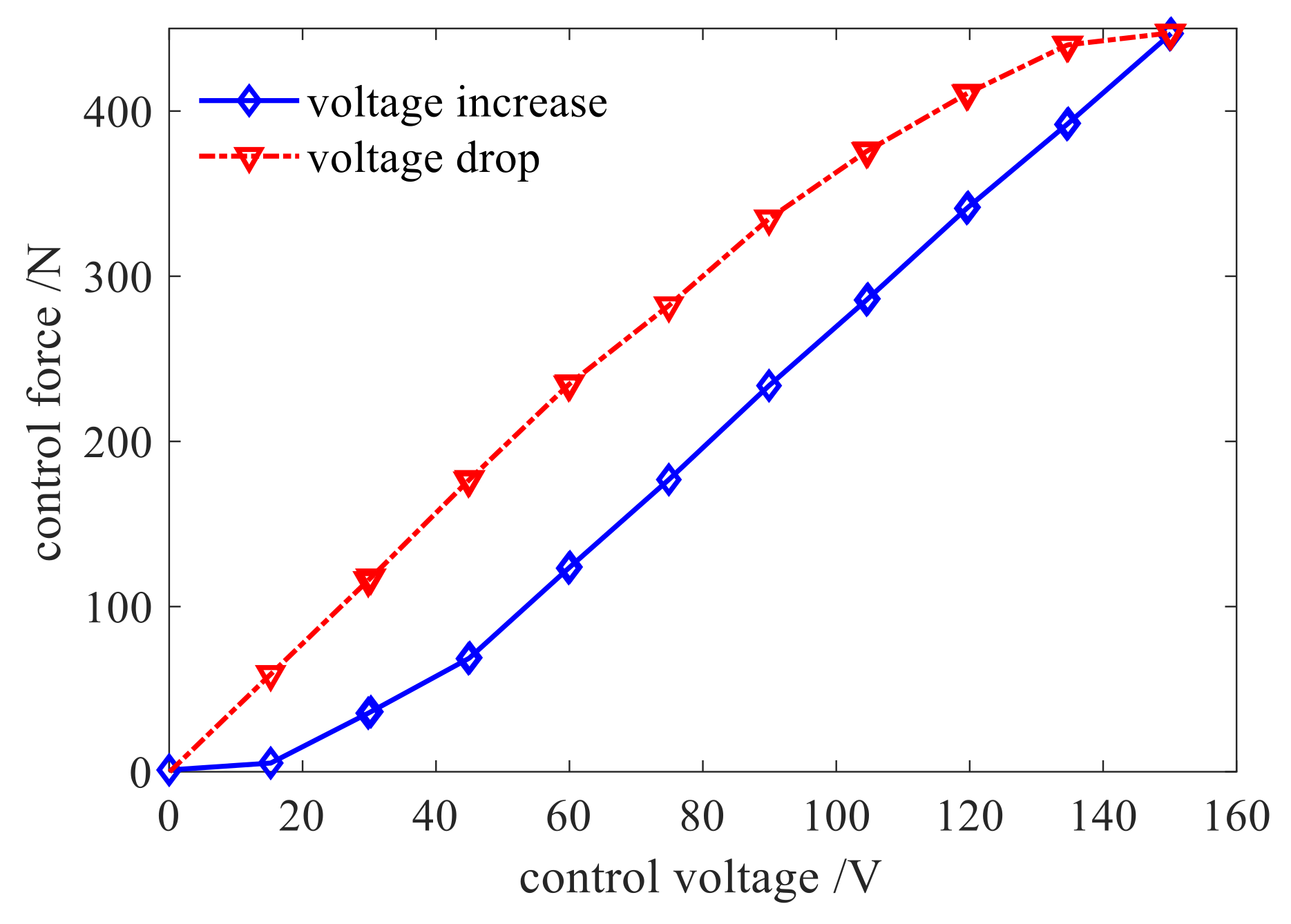
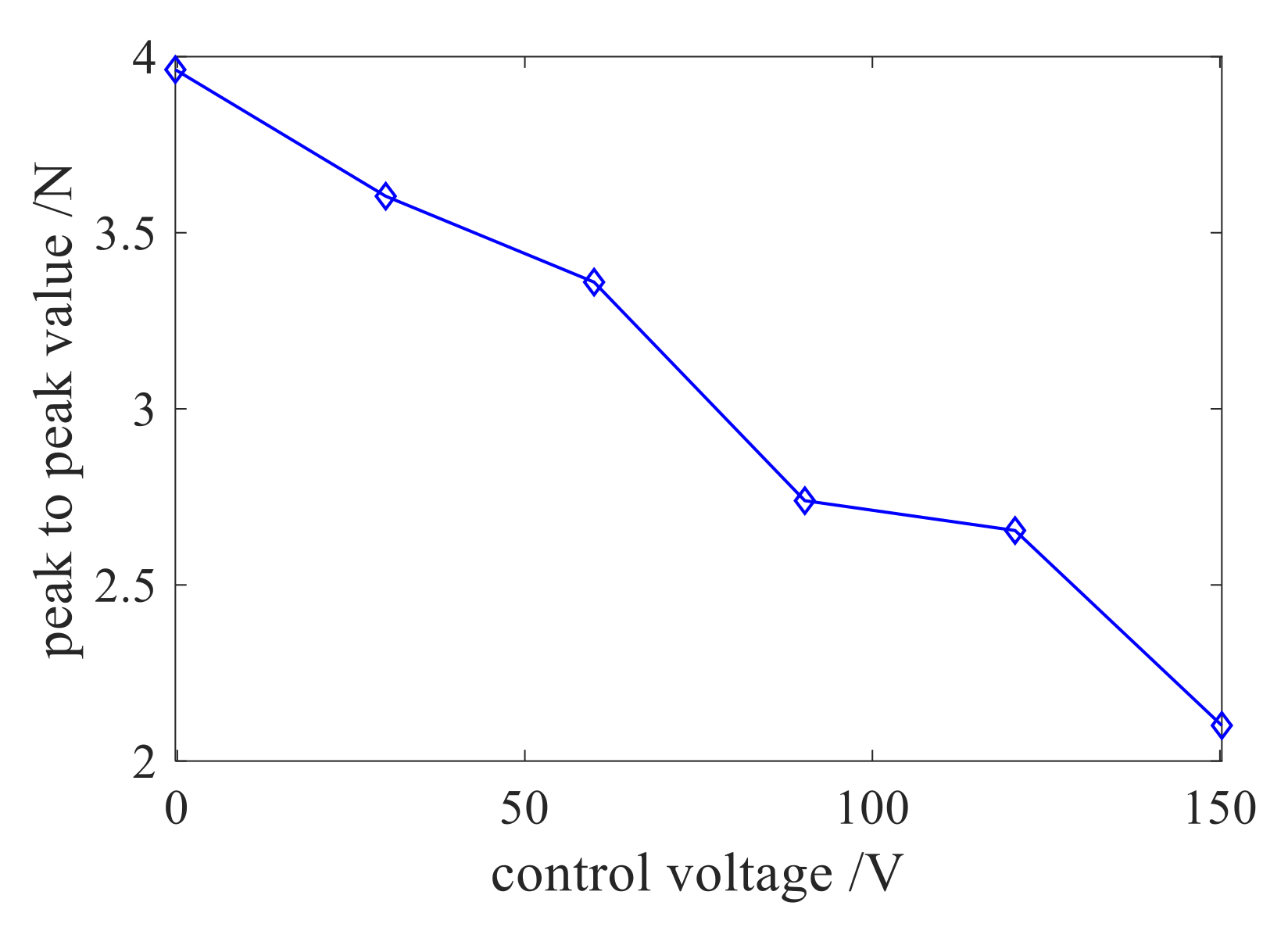
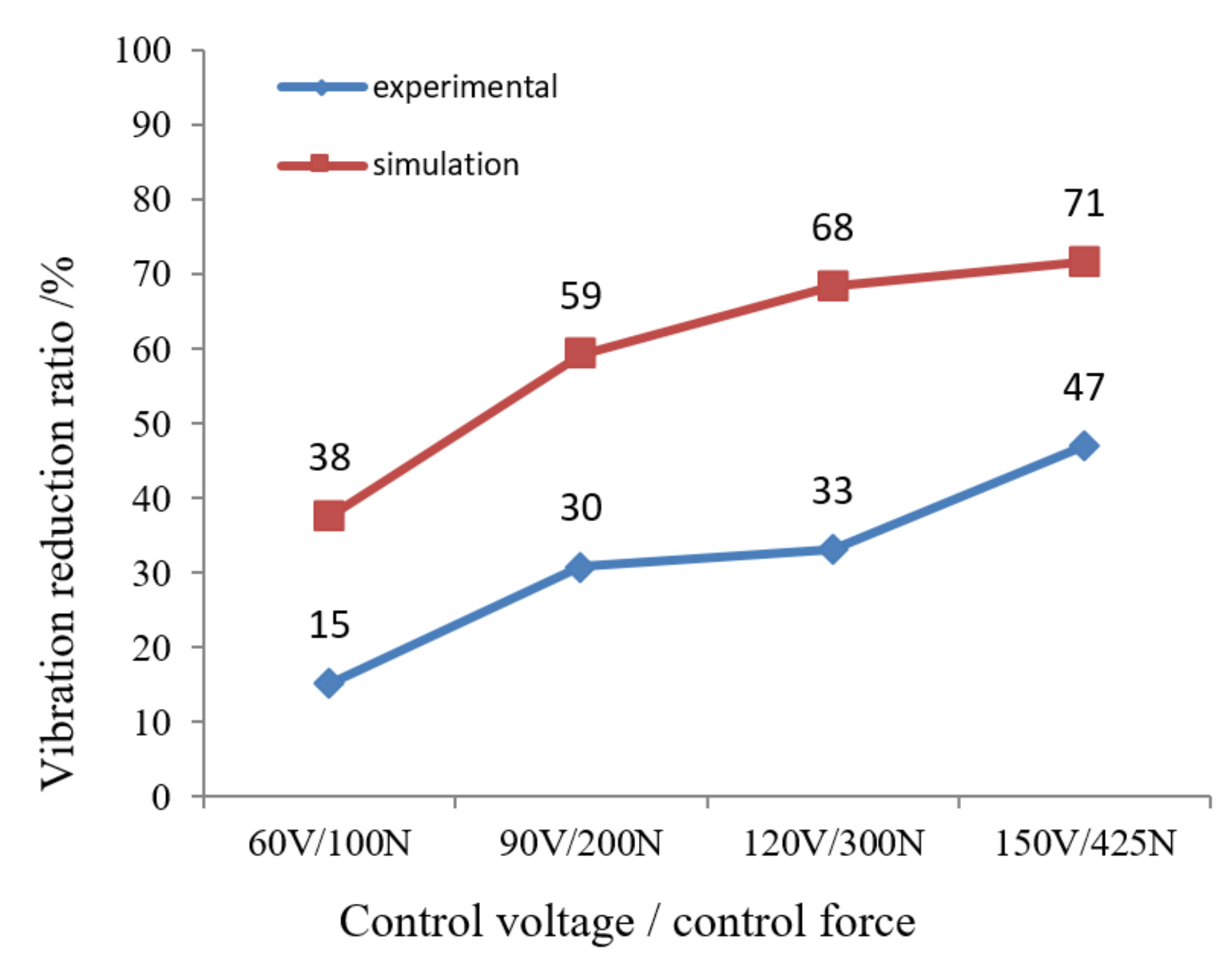
- In this paper, the authors established a joint simulation model for the double-disk three-support shafting with Smart Spring, and carried out the open-loop control simulation and experimental study of the shafting over-critical vibration. The simulation results showed that the fixed control force exerted by the Smart Spring can greatly reduce the displacement response of the double-disk shaft system accelerating through the critical value. However, the fixed control force is not better when greater, but there is an optimal fixed control force making the vibration control effect the best. The optimal fixed control force is 425 N, and the vibration reduction rate is the maximum, which is 71.6%. The double-disk shafting test system was designed and tested. The test results showed that when the maximum control voltage is 150 V, the vibration reduction rate is the highest, reaching 44.2%, which verified that the Smart Spring support has good control effect on the lateral bending vibration of the three-support shafting when the acceleration is over-critical, and further proved the rationality of the joint simulation method.
- (2)
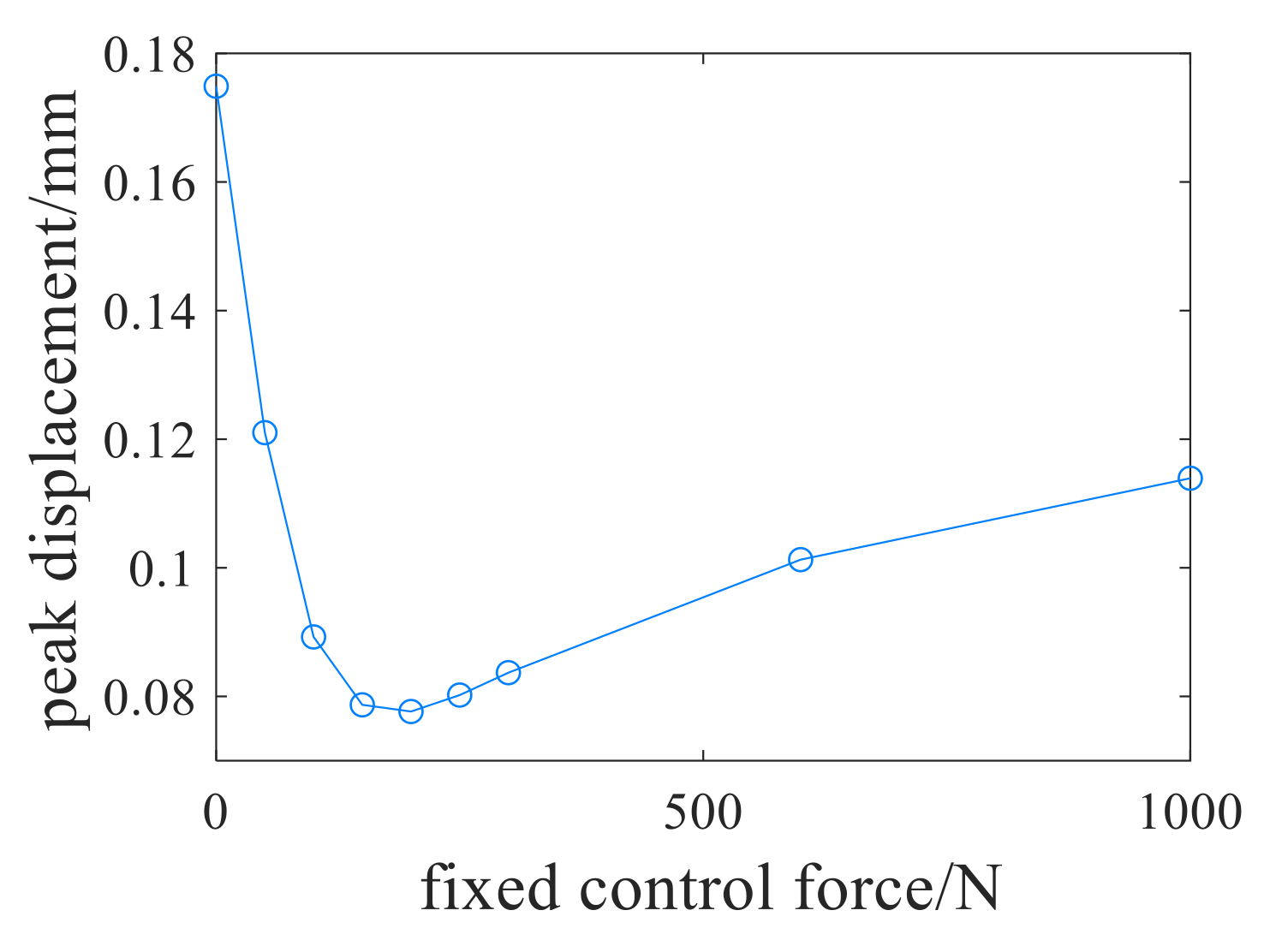
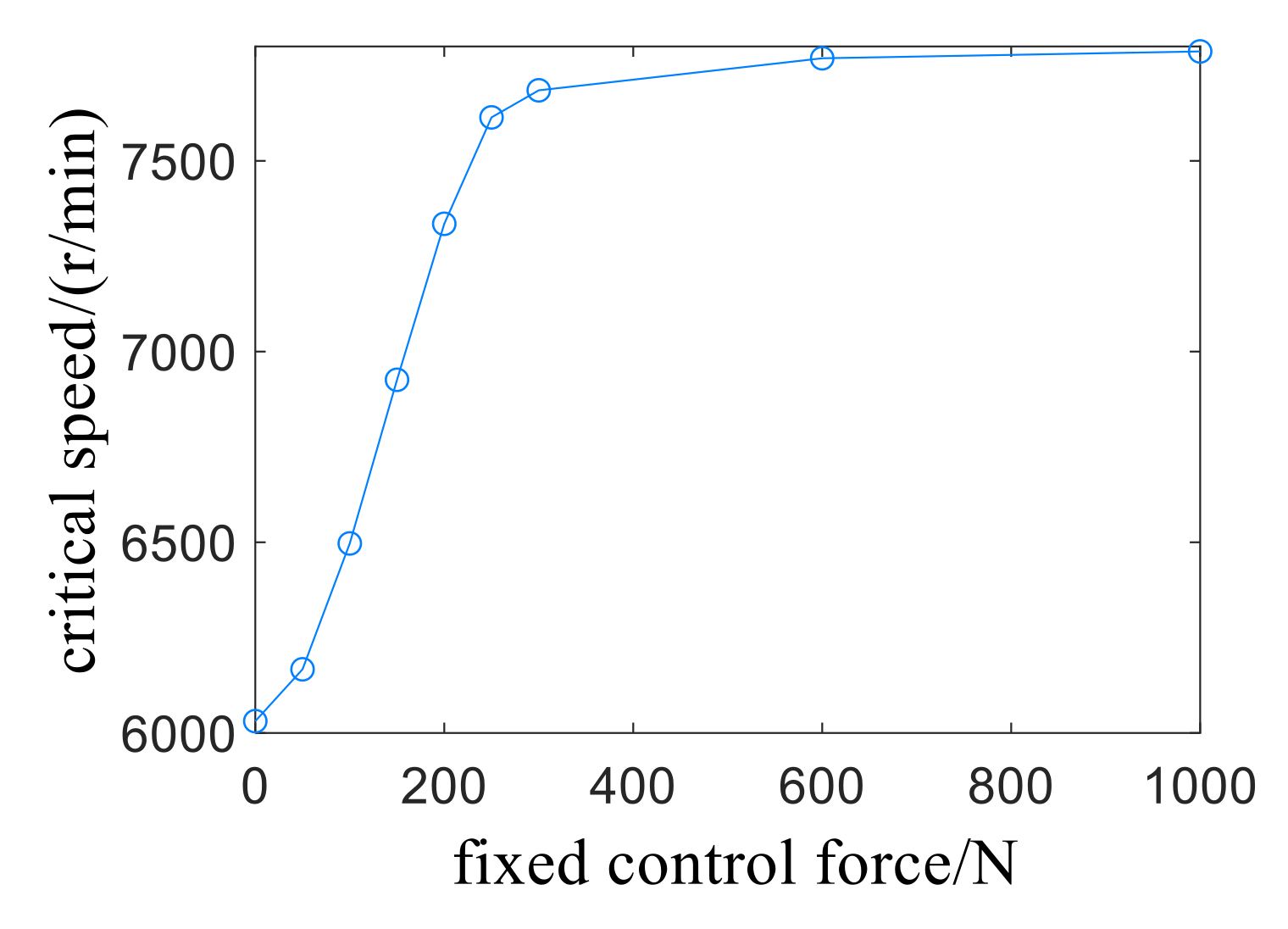
- The open-loop control of the spring system was carried out by the joint control function of the spring system. The simulation results showed that with the increase of fixed control force, the first critical speed gradually increases and tends to be stable, and the peak value decreases first and then increases. The optimal fixed control force is 200 N, of which the maximum vibration reduction rate reaches 55.6%. Compared with the fixed control force, the displacement response of the function control force is significantly less than that of the fixed control force of 200 N, so it has a better vibration reduction effect.
Author Contributions
Funding
Conflicts of Interest
References
- Meng, G. Retrospect and Prospect to the Research on Rotor Dynamics. Shock Noise 2002, 15, 1–9. [Google Scholar]
- Peng, B. Research on Multi-span Shaft Dynamics and Vibration Reduction via Smart Spring Support. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2017. [Google Scholar]
- Li, W.Z.; Wang, L.Q. Review on Vibration Control Technology of High-speed Rotor System. J. Mech. Strength 2005, 27, 44–49. [Google Scholar]
- Zhang, T.; Meng, G.; Zhang, Z.X. Active Control of the Rotor System by Electromagnetic Bearing-Extrudod Oil Film Damper. J. Xi’an Pet. Inst. Nat. Sci. Ed. 2002, 6, 80–83. [Google Scholar]
- Xing, J. Research on Active Vibration Control of Rotor System Using Magnetorheological Fluid Damper. Master’s Thesis, Beijing University of Chemical Technology, Beijing, China, 2015. [Google Scholar]
- Qu, W.Z.; Sun, J.C.; Qiu, Y. Active control of vibration using a fuzzy control method. J. Sound Vib. 2004, 275, 917–930. [Google Scholar]
- Ishimatsu, T.; Shimomachi, T.; Taguchi, N. Active vibration control of flexible rotor using electromagneticdamper. In Proceedings of the IECON’91: 1991 International Conference on Industrial Electronics, Control and Instrumentation, Kobe, Japan, 28 October 1991; IEEE: Piscataway, NJ, USA. [Google Scholar]
- Palazzolo, A.B.; Jagannathan, S.; Kascak, A.F.; Montague, G.T.; Kiraly, L.J. Hybrid active vibration control of rotor bearing system using piezoelectric actuators. J. Vib. Acoust. 1993, 115, 111–119. [Google Scholar] [CrossRef]
- De, N. Research on Design Method of Smart Spring Damping System and Its Application in the Drive Shaft System. Ph.D. Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2015. [Google Scholar]
- Nitzsche, F. The use of smart structures in the realization of effective semi-active Control systems for vibration reduction. J. Braz. Soc. Mech. Sci. Eng. 2012, XXXIV, 371–377. [Google Scholar] [CrossRef] [Green Version]
- Nitzsche, F.; Feszty, D.; Grappasonni, C.; Coppotelli, G. Whirl-tower Open-loop Experiments and Simulations with an Adaptive Pitch Link Device for Helicopter Rotor Vibration. In Proceedings of the Aiaa/asme/asce/ahs/asc Structures, Structural Dynamics, & Materials Conference, Boston, MA, USA, 8–11 April 2013; pp. 1–13. [Google Scholar]
- Afagh, F.F.; Nitzsche, F.; Morozova, N. Dynamic modelling and stability of hingeless helicopter blades with a smart spring. Aeronaut. J. 2004, 108, 369–377. [Google Scholar] [CrossRef]
- Coppotelli, G.; Marzocca, P.; Ulker, F.D.; Campbell, J.; Nitzsche, F. Experimental Investigation on Modal Signature of Smart Spring/Helicopter Blade System. J. Aircr. 2008, 45, 1373–1380. [Google Scholar] [CrossRef]
- Chen, Y. Development of the smart spring for active vibration control of helicopter blades. J. Intell. Mater. Syst. Sructures 2004, 15, 37–47. [Google Scholar]
- Wickramasinghe, V. Experimental evaluation of the smart spring impedance control approach for adaptive vibration suppression. J. Intell. Mater. Syst. Sructures 2008, 19, 171–179. [Google Scholar] [CrossRef]
- Cavalini, A.A., Jr. Vibration attenuation in rotating machines using smart spring mechanism. In Mathematical Problems in Engineering; Hindawi Publishing Corporation: London, UK, 2011; pp. 1–14. [Google Scholar]
- NI, D.; Zhu, R.-P. Influencing factors of vibration suppression performance for a smart spring device. J. Vib. Shock 2012, 31, 87–98. [Google Scholar]
- Peng, B.; Zhu, R.; Li, M. Bending Vibration Suppression of a Flexible Multispan Shaft Using Smart Spring Support. Shock Vib. 2017, 2017, 1–12. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Value/Unit | Parameter Name | Value/Unit |
|---|---|---|---|
| The density of the shaft ρ | 7850/(kg∙m−3) | Elastic modulus E | 2 × 1011/Pa |
| Shaft radius r | 7.5/mm | Disc radius R | 75/mm |
| Length of shaft l1 | 120/mm | Disc width b | 8/mm |
| Length of shaft l2 | 70/mm | Support stiffness kb | 1.7 × 105/(N∙m−1) |
| Length of shaft l3 | 80/mm | Support damping cb | 60/(N∙s∙m−1) |
| Length of shaft l4 | 270/mm | Unbalance magnitude e0 | 6.3 × 10−5 kg∙m |
| Length of shaft l3 | 420/mm | Auxiliary support stiffness ka | 6 × 105 N∙m−1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.-M.; Ma, L.-L.; Wu, C.-G.; Zhu, R.-P. Study on the Vibration Active Control of Three-Support Shafting with Smart Spring While Accelerating over the Critical Speed. Appl. Sci. 2020, 10, 6100. https://doi.org/10.3390/app10176100
Li M-M, Ma L-L, Wu C-G, Zhu R-P. Study on the Vibration Active Control of Three-Support Shafting with Smart Spring While Accelerating over the Critical Speed. Applied Sciences. 2020; 10(17):6100. https://doi.org/10.3390/app10176100
Chicago/Turabian StyleLi, Miao-Miao, Liang-Liang Ma, Chuan-Guo Wu, and Ru-Peng Zhu. 2020. "Study on the Vibration Active Control of Three-Support Shafting with Smart Spring While Accelerating over the Critical Speed" Applied Sciences 10, no. 17: 6100. https://doi.org/10.3390/app10176100
APA StyleLi, M. -M., Ma, L. -L., Wu, C. -G., & Zhu, R. -P. (2020). Study on the Vibration Active Control of Three-Support Shafting with Smart Spring While Accelerating over the Critical Speed. Applied Sciences, 10(17), 6100. https://doi.org/10.3390/app10176100