Rectangular Closed Double Magnetic Circuit Offering Ultra-Long Stroke for Ultra-Low-Frequency Vibration Exciter

Abstract
:1. Introduction
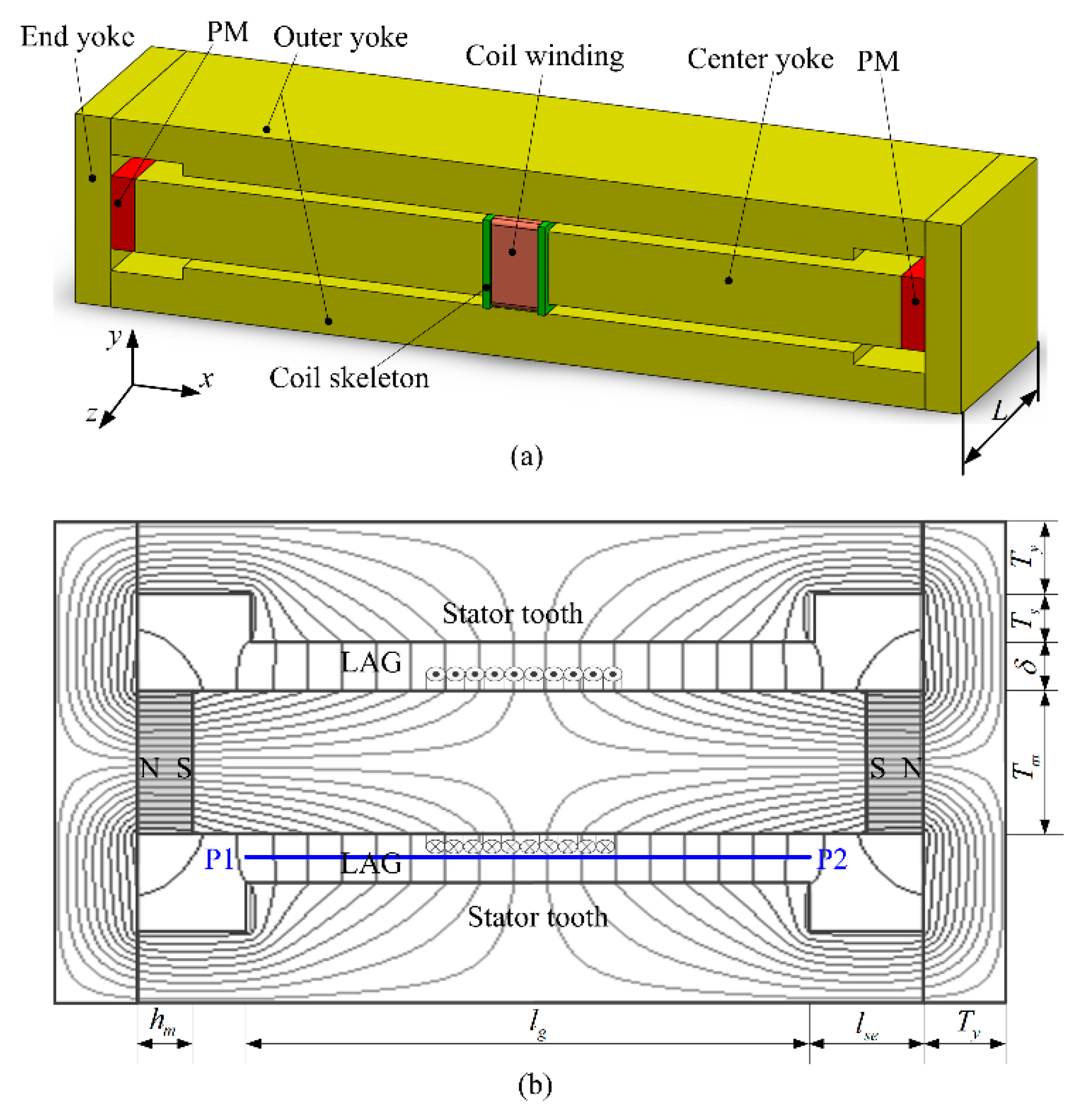
2. Principle of RCDMC
3. Theoretical Modeling by LPMEC Method
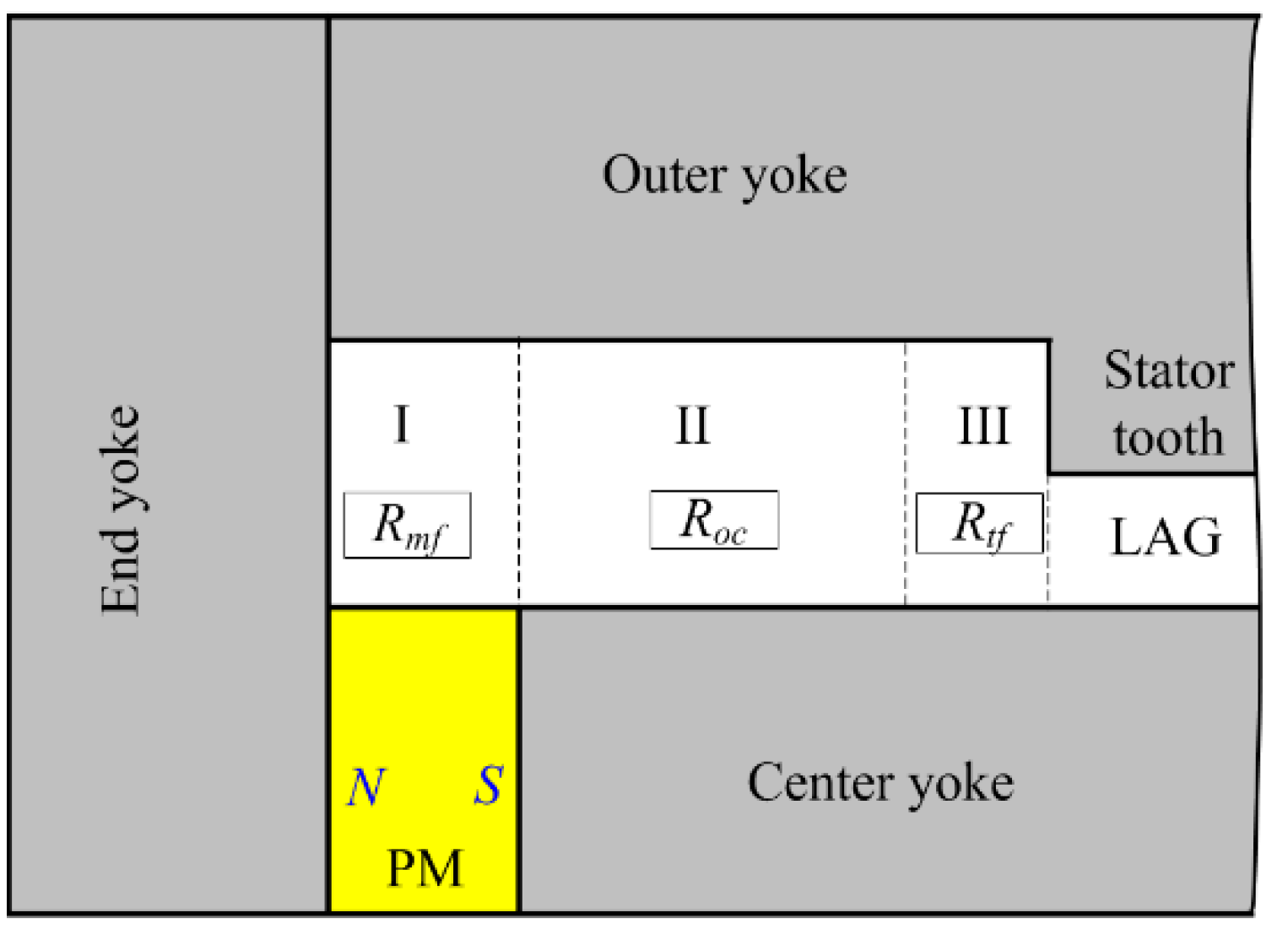
3.1. LPMEC Model
3.2. Iteration Solving Method
3.3. FEM Verification
4. Model-Based Optimization
4.1. Optimization Objectives
4.2. Optimization of hm and lse
4.3. Optimization of δ and Ts
4.4. Optimization Design Results
5. Experiments
5.1. Experimental Setup
5.2. MFD along Air Gaps
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- He, W.; Zhang, X.; Wang, C.; Shen, R.; Yu, M. A long-stroke horizontal electromagnetic vibrator for ultralow-frequency vibration calibration. Meas. Sci. Technol. 2014, 25, 085901. [Google Scholar]
- He, W.; Wang, Z.; Mei, Y.; Shen, R. A novel vibration-level-adjustment strategy for ultralow-frequency vibration calibration based on frequency-shifted method. Meas. Sci. Technol. 2013, 24, 025007. [Google Scholar]
- Liu, Y.-C.; Fan, K.-C.; Chu, C.-L.; Werner, C.A.; Jaeger, G. Development of an optical accelerometer for low-frequency vibration using the voice coil on a dvd pickup head. Meas. Sci. Technol. 2008, 19, 084012. [Google Scholar]
- von Martens, H.-J. Metrology of vibration measurements by laser techniques. In Eighth International Conference on Vibration Measurements by Laser Techniques: Advances and Applications; Tomasini, E.P., Ed.; Society of Photo Optical: Washington, DC, USA, 17 June 2008; Volume 7098. [Google Scholar]
- Mende, M.; Nicklich, H. Calibration of very low frequency accelerometers—A challenging task. Sound Vibr. 2011, 45, 14–17. [Google Scholar]
- Metzgar, K.; Tillou, F. Electrodynamic Force Generator. US Patent US3816777A, 11 June 1974. [Google Scholar]
- He, W.; Wang, C.; Yu, M.; Shen, R.; Jia, S. Closed-double-magnetic circuit for a long-stroke horizontal electromagnetic vibration exciter. IEEE Trans. Magn. 2013, 49, 4865–4872. [Google Scholar]
- Von Martens, H.J.; Taubner, A.; Wabinski, W.; Link, A.; Schlaak, H.J. Traceability of vibration and shock measurements by laser interferometry. Measurement 2000, 28, 3–20. [Google Scholar]
- Qu, R.H.; Lipo, T.A. Analysis and modeling of air-gap and zigzag leakage fluxes in a surface-mounted permanent-magnet machine. IEEE Trans. Ind. Appl. 2004, 40, 121–127. [Google Scholar]
- Liang, P.X.; Chai, F.; Bi, Y.L.; Pei, Y.L.; Cheng, S.K. Analytical model and design of spoke-type permanent-magnet machines accounting for saturation and nonlinearity of magnetic bridges. J. Magn. Magn. Mater. 2016, 417, 389–396. [Google Scholar]
- Yan, H.S.; Wu, Y.C. A novel configuration for a brushless dc motor with an integrated planetary gear train. J. Magn. Magn. Mater. 2006, 301, 532–540. [Google Scholar]
- Liu, H.S.; Dun, C.C.; Dou, L.M.; Yang, W.M. Theoretical analysis of magnetic sensor output voltage. J. Magn. Magn. Mater. 2011, 323, 1667–1670. [Google Scholar]
- Batdorff, M.A.; Lumkes, J.H. High-fidelity magnetic equivalent circuit model for an axisymmetric electromagnetic actuator. IEEE Trans. Magn. 2009, 45, 3064–3072. [Google Scholar]
- Roshen, W.A. Fringing field formulas and winding loss due to an air gap. IEEE Trans. Magn. 2007, 43, 3387–3394. [Google Scholar]
- Liu, Y.; Zhang, M.; Zhu, Y.; Yang, J.; Chen, B. Optimization of voice coil motor to enhance dynamic response based on an improved magnetic equivalent circuit model. IEEE Trans. Magn. 2011, 47, 2247–2251. [Google Scholar]
- Okyay, A.; Khamesee, M.B.; Erkorkmaz, K. Design and optimization of a voice coil actuator for precision motion applications. IEEE Trans. Magn. 2015, 51, 1. [Google Scholar]
- Nakamura, K.; Saito, K.; Watanabe, T.; Ichinokura, O. A new nonlinear magnetic circuit model for dynamic analysis of interior permanent magnet synchronous motor. J. Magn. Magn. Mater. 2005, 290, 1313–1317. [Google Scholar]
- Tan, J.H.Z.; Cui, J. Both Ends of the Rectangular Symmetrical Dual Magnetic Circuit Excited Field Type Electromagnetic Vibration Table Open Magnetic Structure (in Chinese). CN104849005B, 22 June 2016. [Google Scholar]
- He, Z. Rectangular closed double magnetic circuit for vibration exciter with 12 m stroke. In Proceedings of the 2019 14th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), Changsha, China, 1–3 November 2019; pp. 1891–1895. [Google Scholar]
- Cui, J.; He, Z.; Tan, J. Proposal and analysis of three closed double magnetic circuits to obtain a very long stroke for electrodynamic force generators. Sens. Actuator A Phys. 2017, 263, 122–130. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reluctances | Equations | Reluctances | Equations |
|---|---|---|---|
| Case No. | Geometrical Dimensions | |||
|---|---|---|---|---|
| hm (mm) | Ts (mm) | lse (mm) | δ (mm) | |
| 1 | 50 | 25 | 150 | 20 |
| 2 | 30 | 25 | 130 | 20 |
| 3 | 50 | 15 | 150 | 20 |
| 4 | 50 | 25 | 100 | 20 |
| 5 | 50 | 25 | 150 | 15 |
| Case No. | LPMEC Results | FEM Results | Deviation (%)* | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Bm (T) | Bave (mT) | Bu (%) | Bm (T) | Bave (mT) | Bu (%) | Bm | Bave | Bu | |
| 1 | 1.2409 | 122.0 | 0.628 | 1.2422 | 122.0 | 0.631 | 0.10 | 0 | 0.47 |
| 2 | 1.2045 | 118.6 | 0.636 | 1.2064 | 118.4 | 0.640 | 0.15 | -0.16 | 0.62 |
| 3 | 1.2420 | 119.9 | 0.648 | 1.2426 | 120.4 | 0.646 | 0.04 | 0.41 | -0.30 |
| 4 | 1.2394 | 125.7 | 0.620 | 1.2404 | 125.6 | 0.623 | 0.08 | -0.07 | 0.48 |
| 5 | 1.2540 | 124.8 | 0.829 | 1.2549 | 124.9 | 0.821 | 0.07 | 0.08 | -0.97 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, J.; Li, W.; Bian, X.; He, Z.; Zou, L. Rectangular Closed Double Magnetic Circuit Offering Ultra-Long Stroke for Ultra-Low-Frequency Vibration Exciter. Appl. Sci. 2020, 10, 6118. https://doi.org/10.3390/app10176118
Cui J, Li W, Bian X, He Z, Zou L. Rectangular Closed Double Magnetic Circuit Offering Ultra-Long Stroke for Ultra-Low-Frequency Vibration Exciter. Applied Sciences. 2020; 10(17):6118. https://doi.org/10.3390/app10176118
Chicago/Turabian StyleCui, Junning, Wei Li, Xingyuan Bian, Zhangqiang He, and Limin Zou. 2020. "Rectangular Closed Double Magnetic Circuit Offering Ultra-Long Stroke for Ultra-Low-Frequency Vibration Exciter" Applied Sciences 10, no. 17: 6118. https://doi.org/10.3390/app10176118
APA StyleCui, J., Li, W., Bian, X., He, Z., & Zou, L. (2020). Rectangular Closed Double Magnetic Circuit Offering Ultra-Long Stroke for Ultra-Low-Frequency Vibration Exciter. Applied Sciences, 10(17), 6118. https://doi.org/10.3390/app10176118