Electrical Monitoring under Transient Conditions: A New Paradigm in Electric Motors Predictive Maintenance


Abstract
:Featured Application
Abstract
1. Introduction
- -
- Avoidance of false indications: the time-frequency analyses of starting currents or fluxes have proven to be immune to some phenomena that may yield false indications when classical approaches are employed (e.g., presence of cooling ducts, existence of load torque oscillations, diagnosis of outer cage breakage in double cage rotors, existence of rotor magnetic anisotropy, influence of blade pass frequencies caused by certain loads…).
- -
- High reliability in the diagnostic: since the diagnosis is based on the identification of the time-evolutions of frequency components, it is much more reliable than that relying on the assessment of single frequency components in the Fourier spectra; in other words, the time-frequency (t-f) patterns raising in the resulting t-f maps are less likely to be masked or interfered by other phenomena than a specific peak in the spectrum. If this were not enough, the diagnosis does not rely on a single evolution but on the multiple evolutions caused by the fault harmonics under the considered transient.
- -
- Suitability for different operation regimes: the analysis of transient quantities yields correct diagnosis conclusions regardless of the load level of the machine. Therefore, it is perfectly valid for machines operating under reduced slip conditions, provided that the transient is long enough. This does not happen with the conventional methods, such as MCSA. Moreover, the new methodology is especially valid for applications subjected to frequent transients (traction systems, renewable energy applications), since the employed tools are especially suited for these regimes. Again, the conventional methods, such as MCSA, are restricted to stationary conditions, providing possible wrong diagnostics in applications in which either the speed or the supply frequency changes during the capture [7].
2. Foundations of the Transient Analysis of Electrical Quantities
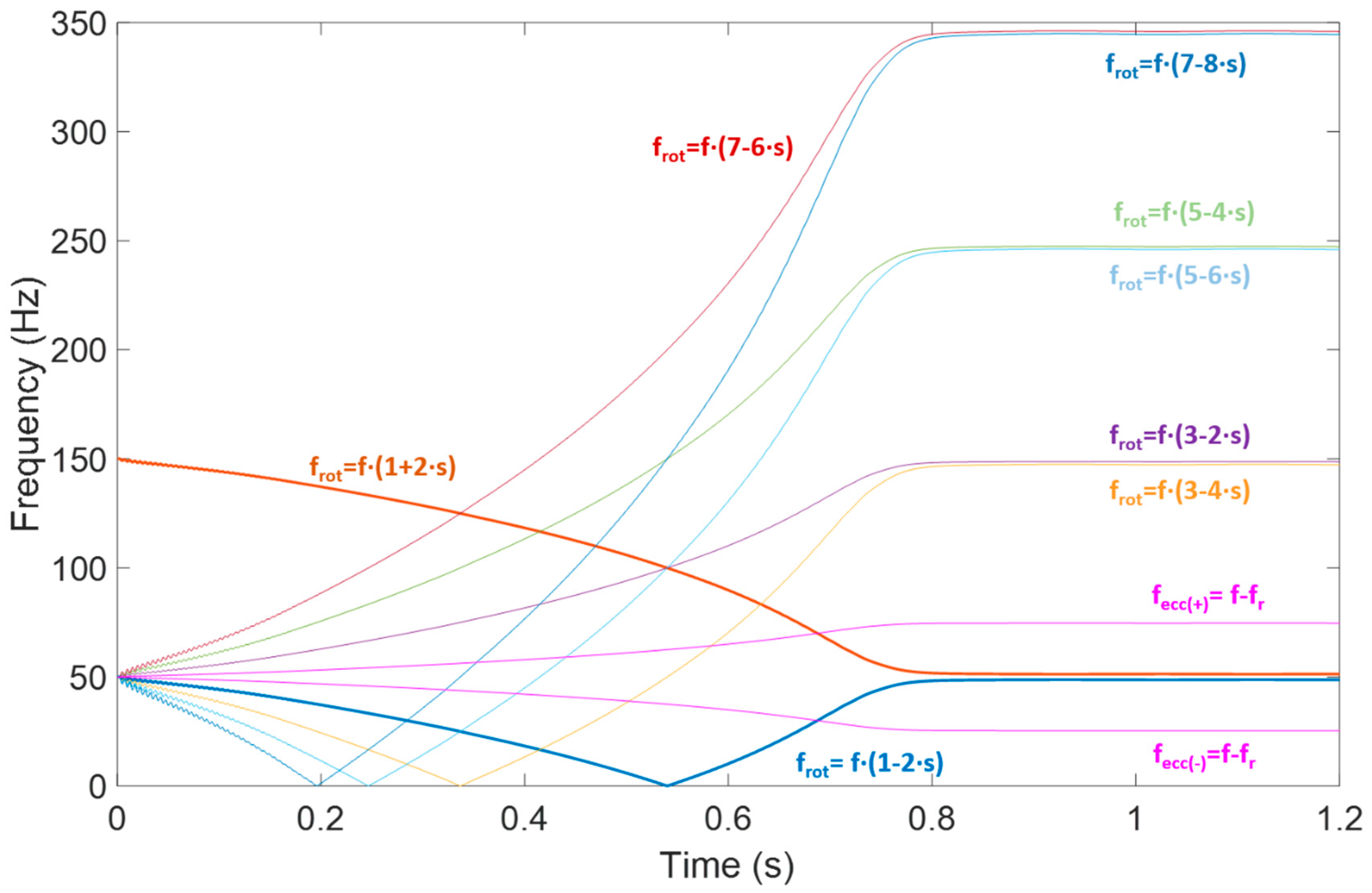
2.1. Transient Analysis of Motor Currents
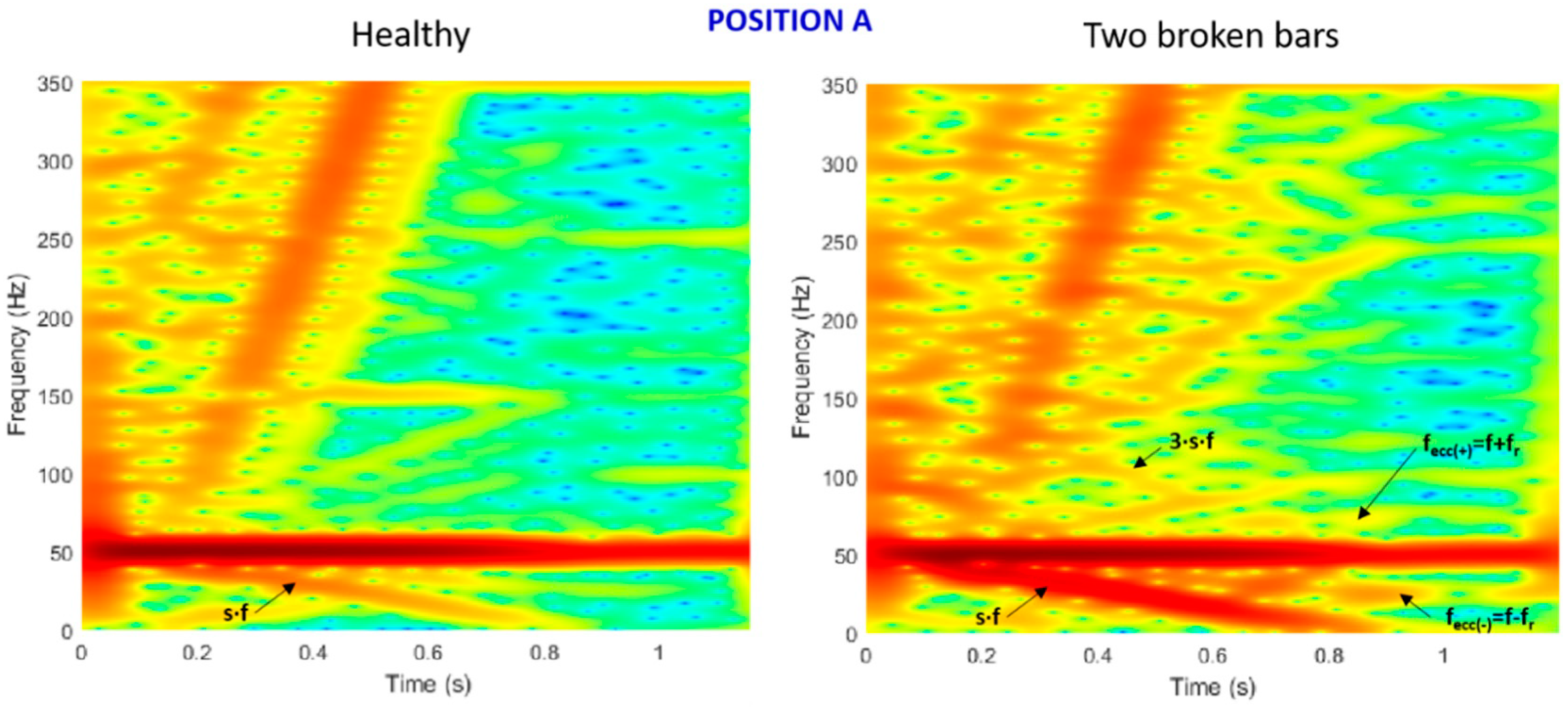
2.2. Transient Analysis of Stray Fluxes
3. Signal Processing Tools
4. Results
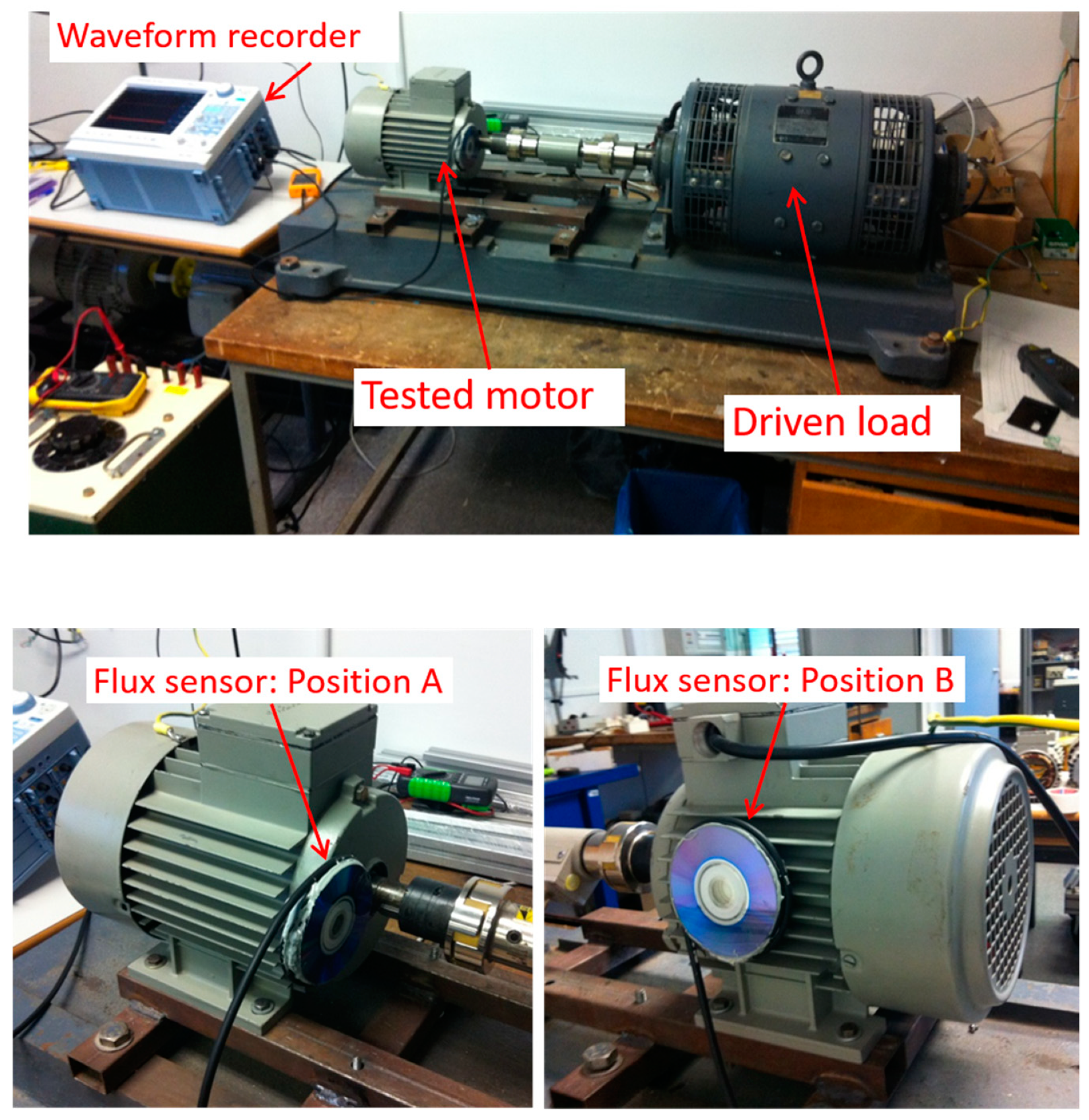
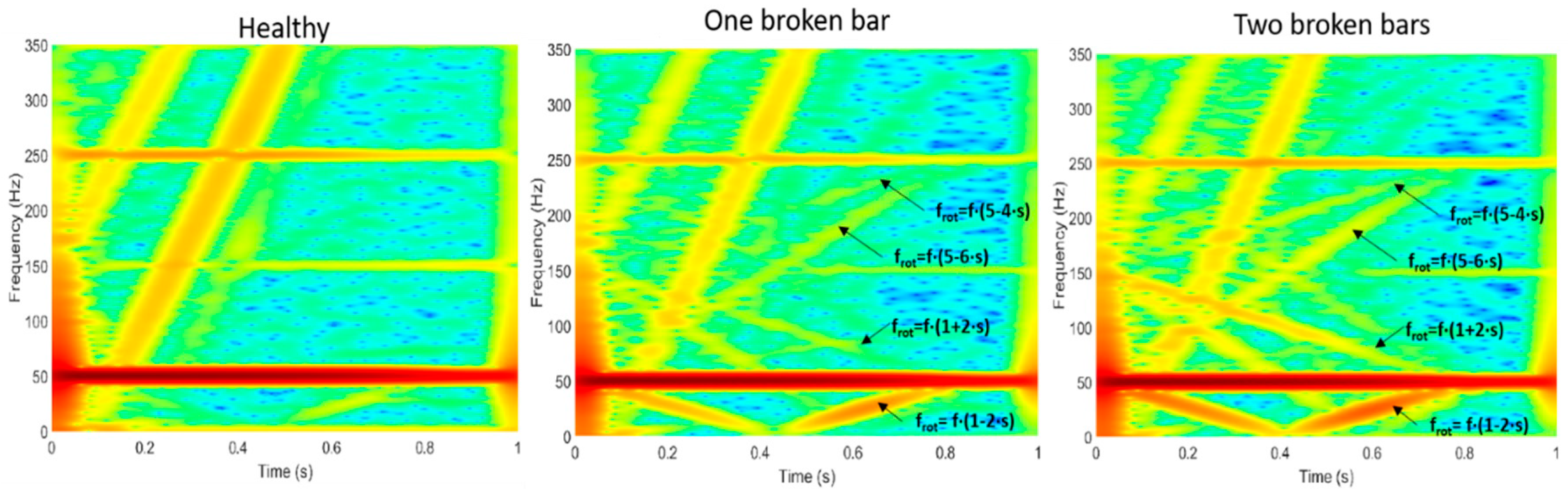
4.1. Results in Laboratory Motors
4.2. Results in Field Motors
4.2.1. Cage Motors in Water Intake Facility (3.8 MW, 6.6 kV)
4.2.2. Cage Motor in a Sewage Treatment Plant (30 kW, 400 V)
4.2.3. Wound Rotor Induction Motor in a Cement Plant (1.5 MW, 6.6 kV)
5. Conclusions
Funding
Conflicts of Interest
Nomenclature
| CWD | Choi-Williams Distributions |
| CWT | Continuous Wavelet Transform |
| DWT | Discrete Wavelet Transform |
| HHT | Hilbert-Huang Transform |
| LSH | Lower Sideband Harmonic |
| MCSA | Motor Current Signature Analysis |
| STFT | Short Time Fourier Transform |
| UDWT | Undecimated Discrete Wavelet Transform |
| USH | Upper Sideband Harmonic |
| VSD | Variable Speed Drive |
| WP | Wavelet Packets |
| WVD | Wigner-Ville Distribution |
References
- De la Morena, J. Eficiencia energética en motores eléctricos. Normativa IEC 60034-30. In Proceedings of the II Congreso de Eficiencia Energética, Madrid, Spain, 23–26 October 2012. [Google Scholar]
- Electric Motor Engineering. Available online: https://www.electricmotorengineering.com/a-global-electric-motor-market-overview/ (accessed on 10 August 2020).
- Antonino-Daviu, J.; Fuster-Roig, V.; Park, S.; Park, Y.; Choi, H.; Park, J.; Lee, S.B. Electrical Monitoring of Damper Bar Condition in Salient-Pole Synchronous Motors Without Motor Disassembly. IEEE Trans. Ind. Appl. 2020, 56, 1423–1431. [Google Scholar] [CrossRef]
- Garcia, M.; Panagiotou, P.; Antonino-Daviu, J.; Gyftakis, K.N. Efficiency Assessment of Induction Motors Operating Under Different Faulty Conditions. IEEE Trans. Ind. Electron. 2019, 66, 8072–8081. [Google Scholar] [CrossRef]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition monitoring and fault diagnosis of electrical motors—A review. IEEE Trans. Energy Convers. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Thomson, W.T.; Culbert, I. Current Signature Analysis for Condition Monitoring of Cage Induction Motors: Industrial Application and Case Histories; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Antonino-Daviu, J.A.; Quijano-López, A.; Rubbiolo, M.; Climente-Alarcon, V. Advanced Analysis of Motor Currents for the Diagnosis of the Rotor Condition in Electric Motors Operating in Mining Facilities. IEEE Trans. Ind. Appl. 2018, 54, 3934–3942. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.A.; Pons-Llinares, J.; Lee, S.B. Advanced rotor fault diagnosis for medium-voltage induction motors via continuous transforms. IEEE Trans. Ind. Appl. 2016, 52, 4503–4509. [Google Scholar] [CrossRef]
- Lee, S.B.; Stone, G.; Antonino-Daviu, J.; Gyftakis, K.N.; Strangas, E.G.; Maussion, P.; Platero, C.A. Recent Challenges in Condition Monitoring of Industrial Electric Machines. IEEE Ind. Electron. Mag. 2020, in press. [Google Scholar]
- Antonino-Daviu, J.A.; Riera-Guasp, M.; Roger Folch, J.; Molina-Palomares, M.P. Validation of a new method for the diagnosis of rotor bar failures via wavelet transform in industrial induction machines. IEEE Trans. Ind. Appl. 2006, 42, 990–996. [Google Scholar] [CrossRef]
- Schoen, R.R.; Habetler, T.G. Evaluation and implementation of a system to eliminate arbitrary load effects in current-based monitoring of induction machines. IEEE Trans. Ind. Appl. 1997, 33, 1571–1577. [Google Scholar] [CrossRef]
- Lee, S.; Hong, J.; Lee, S.B.; Wiedenbrug, E.J.; Teska, M.; Kim, H. Evaluation of the Influence of Rotor Axial Air Ducts on Condition Monitoring of Induction Motors. IEEE Trans. Ind. Appl. 2013, 49, 2024–2033. [Google Scholar] [CrossRef]
- Yang, C.; Kang, T.; Hyun, D.; Lee, S.B.; Antonino-Daviu, J.A.; Pons-Llinares, J. Reliable Detection of Induction Motor Rotor Faults Under the Rotor Axial Air Duct Influence. IEEE Trans. Ind. Appl. 2014, 50, 2493–2502. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.A.; Pons-Llinares, J.; Shin, S.; Lee, K.W.; Lee, S.B. Reliable detection of induction motor rotor faults under the influence of rotor core magnetic anisotropy. In Proceedings of the IEEE 10th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED 2015), Guarda, Portugal, 1–4 September 2015; pp. 14–21. [Google Scholar]
- Park, Y.; Jeong, M.; Lee, S.B.; Antonino-Daviu, J.A.; Teska, M. Influence of Blade Pass Frequency Vibrations on MCSA-Based Rotor Fault Detection of Induction Motors. IEEE Trans. Ind. Appl. 2017, 53, 2049–2058. [Google Scholar] [CrossRef]
- Riera-Guasp, M.; Cabanas, M.F.; Antonino-Daviu, J.A.; Pineda-Sánchez, M.; García, C.H.R. Influence of Nonconsecutive Bar Breakages in Motor Current Signature Analysis for the Diagnosis of Rotor Faults in Induction Motors. IEEE Trans. Energy Convers. 2010, 25, 80–89. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.; Riera-Guasp, M.; Pons-Llinares, J.; Park, J.; Lee, S.B.; Yoo, J.; Kral, C. Detection of Broken Outer-Cage Bars for Double-Cage Induction Motors Under the Startup Transient. IEEE Trans. Ind. Appl. 2012, 48, 1539–1548. [Google Scholar] [CrossRef]
- Lee, S.B.; Wiedenbrug, E.; Younsi, K. Testing and Diagnostics of Induction Machines in an Industrial Environment; ECCE 2013 Tutorial; IEEE Industry Applications Society: Denver, CO, USA, 2013. [Google Scholar]
- Antonino-Daviu, J.; Jover, P.; Riera-Guasp, M.; Roger-Folch, J.; Arkkio, A. DWT Analysis of Numerical and Experimental Data for the Diagnosis of Dynamic Eccentricities in Induction Motors. Mech. Syst. Signal Process. 2007, 21, 2575–2589. [Google Scholar] [CrossRef]
- Picot, A.; Fournier, E.; Régnier, J.; Tientcheu Yamdeu, M.; Andréjak, J.; Maussion, P. Statistic-Based Method to Monitor Belt Transmission Looseness through Motor Phase Current. IEEE Trans. Ind. Inform. 2017, 13, 1332–1340. [Google Scholar] [CrossRef] [Green Version]
- Antonino-Daviu, J.; Pons-Llinares, J.; Climente-Alarcon, V.; Razik, H. Evaluation of startup-based rotor fault severity indicators under different starting methods. In Proceedings of the 40th Annual Conference of the IEEE Industrial Electronics Society (IECON 2014), Dallas, TX, USA, 29 October–1 November 2014. [Google Scholar]
- Corral Hernandez, J.; Antonino-Daviu, J.A.; Climente-Alarcon, V.; Pons-Llinares, J.; Frances-Galiana, V. Transient-based rotor cage assessment in induction motors operating with soft-starters. IEEE Trans. Ind. Appl. 2015, 51, 3734–3742. [Google Scholar] [CrossRef]
- Pons-Llinares, J.; Antonino-Daviu, J.; Roger-Folch, J.; Moríñigo-Sotelo, D.; Duque-Pérez, O. Mixed eccentricity diagnosis in Inverter-Fed Induction Motors via the Adaptive Slope Transform of transient stator currents. Mech. Syst. Signal Process. 2014, 48, 426–435. [Google Scholar] [CrossRef]
- Pons-Llinares, J.; Moriñigo-Sotelo, D.; Duque-Perez, O.; Antonino-Daviu, J.; Pérez-Alonso, M. Transient Detection of Close Components through the Chirplet Transform: Rotor Faults in Inverter-Fed Induction Motors. In Proceedings of the 40th Annual Conference of the IEEE Industrial Electronics Society (IECON 2014), Dallas, TX, USA, 29 October–1 November 2014. [Google Scholar]
- Henao, H.; Demian, C.; Capolino, G.A. A Frequency Domain Detection of Faults in Induction Machines Using an External Flux Sensor. IEEE Trans. Ind. Appl. 2003, 39, 1272–1279. [Google Scholar] [CrossRef]
- Bellini, A.; Concari, C.; Franceschini, G.; Tassoni, C.; Toscani, A. Vibrations, currents and stray flux signals to asses induction motors rotor conditions. In Proceedings of the IECON 2006—32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006; pp. 4963–4968. [Google Scholar]
- Frosini, L.; Borin, A.; Girometta, L.; Venchi, G. A novel approach to detect short circuits in low voltage induction motor by stray flux measurement. In Proceedings of the International Conference on Electrical Machines (ICEM 2012), Marseille, France, 2–5 September 2012; pp. 1538–1544. [Google Scholar]
- Ramirez-Nunez, J.A.; Antonino-Daviu, J.A.; Climente-Alarcón, V.; Quijano-Lopez, A.; Razik, H.; Osornio-Rios, R.A.; Romero-Troncoso, R.D. Evaluation of the Detectability of Electromechanical Faults in Induction Motors Via Transient Analysis of the Stray Flux. IEEE Trans. Ind. Appl. 2018, 54, 4324–4332. [Google Scholar] [CrossRef]
- Zamudio-Ramirez, I.; Antonino-Daviu, J.A.; Osornio-Rios, R.A.; de Romero-Troncoso, R.J.; Razik, H. Detection of Winding Asymmetries in Wound-Rotor Induction Motors via Transient Analysis of the External Magnetic Field. IEEE Trans. Ind. Electron. 2020, 67, 5050–5059. [Google Scholar] [CrossRef]
- Park, Y.; Choi, H.; Shin, J.; Park, J.; Lee, S.B.; Jo, H. Airgap Flux based Detection and Classification of Induction Motor Rotor and Load Defects during the Starting Transient. IEEE Trans. Ind. Electron. 2020, in press. [Google Scholar] [CrossRef]
- Gyftakis, K.N.; Panagiotou, P.A.; Lee, S.B. Generation of Mechanical Frequency Related Harmonics in the Stray Flux Spectra of Induction Motors Suffering from Rotor Electrical Faults. IEEE Trans. Ind. Appl. 2020, in press. [Google Scholar]
- Park, Y.; Yang, C.; Kim, J.; Kim, H.; Lee, S.B.; Gyftakis, K.N.; Panagiotou, P.A.; Kia, S.H.; Capolino, G.A. Stray Flux Monitoring for Reliable Detection of Rotor Faults Under the Influence of Rotor Axial Air Ducts. IEEE Trans. Ind. Electron. 2019, 66, 7561–7570. [Google Scholar] [CrossRef]
- ABB. ABB Ability Smart Sensor for Motors. Available online: https://new.abb.com/motors-generators/service/advanced-services/smart-sensor/smart-sensor-for-motors (accessed on 10 August 2020).
- WEG Motor Group. WEG Motor Scan—Whitepaper. Available online: https://www.weg.net/wegmotorscan/en (accessed on 10 August 2020).
- Zamudio-Ramírez, I.; Osornio-Rios, R.A.; Antonino-Daviu, J.A. Triaxial Smart Sensor Based on the Advanced Analysis of Stray Flux and Currents for the Reliable Fault Detection in Induction Motors. In Proceedings of the 12th IEEE Energy Conversion Congress and Exposition (ECCE 2020), Detroit, MI, USA, 11–15 October 2020. [Google Scholar]
- Ceban, A.; Pusca, R.; Romary, R. Study of Rotor Faults in Induction Motors Using External Magnetic Field Analysis. IEEE Trans. Ind. Electron. 2012, 59, 2082–2093. [Google Scholar] [CrossRef]
- Romary, R.; Pusca, R.; Lecointe, J.P.; Brudny, J.F. Electrical Machines Fault Diagnosis by Stray Flux Analysis. In Proceedings of the 2013 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Paris, France, 11–12 March 2013; pp. 247–256. [Google Scholar]
- Ishkova, L.; Vitek, O. Detection and classification of faults in induction motor by means of motor current signature analysis and stray flux monitoring. Prz. Elektrotechniczny 2016, 92, 166–170. [Google Scholar] [CrossRef] [Green Version]
- Antonino-Daviu, J.; Zamudio-Ramírez, I.; Osornio-Ríos, R.A.; Fuster-Roig, V.; de Jesús Romero-Troncoso, R.; Dunai, L.D. Stray Flux Analysis for the Detection of Rotor Failures in Wound Rotor Induction Motors. In Proceedings of the 45th Annual Conference of the IEEE Industrial Electronics Society (IECON 2019), Lisbon, Portugal, 14–17 October 2019. [Google Scholar]
- Pons-Llinares, J.; Antonino-Daviu, J.A.; Riera-Guasp, M.; Lee, S.B.; Kang, T.-J.; Yang, C. Advanced Induction Motor Rotor Fault Diagnosis via Continuous and Discrete Time–Frequency Tools. IEEE Trans. Ind. Electron. 2015, 62, 1791–1802. [Google Scholar] [CrossRef]
- Antonino-Daviu, J.A.; Lee, S.B.; Wiedenbrug, E. Reliable detection of rotor bar failures in induction motors operating in petrochemical plants. In Proceedings of the 11th Petroleum and Chemical Industry Conference Europe (PCIC Europe 2014), Amsterdam, The Netherlands, 3–5 June 2014. [Google Scholar]
- Antonino-Daviu, J.A.; Quijano-Lopez, A.; Climente-Alarcon, V.; Garín-Abellán, C. Reliable Detection of Rotor Winding Asymmetries in Wound Rotor Induction Motors via Integral Current Analysis. IEEE Trans. Ind. Appl. 2017, 53, 2040–2048. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Real Machine Condition | Diagnostic Conclusion MCSA | |
|---|---|---|
| Healthy | Faulty | |
| Healthy | CORRECT | FALSE POSITIVE: |
| Faulty | FALSE NEGATIVE: | CORRECT |
| Type of t-f Tool | Advantages | Drawbacks | Examples |
|---|---|---|---|
| Discrete |
|
| DWT, UDWT, WP |
| Continuous |
|
| CWT, HHT, WVD, CWD |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Antonino-Daviu, J. Electrical Monitoring under Transient Conditions: A New Paradigm in Electric Motors Predictive Maintenance. Appl. Sci. 2020, 10, 6137. https://doi.org/10.3390/app10176137
Antonino-Daviu J. Electrical Monitoring under Transient Conditions: A New Paradigm in Electric Motors Predictive Maintenance. Applied Sciences. 2020; 10(17):6137. https://doi.org/10.3390/app10176137
Chicago/Turabian StyleAntonino-Daviu, Jose. 2020. "Electrical Monitoring under Transient Conditions: A New Paradigm in Electric Motors Predictive Maintenance" Applied Sciences 10, no. 17: 6137. https://doi.org/10.3390/app10176137
APA StyleAntonino-Daviu, J. (2020). Electrical Monitoring under Transient Conditions: A New Paradigm in Electric Motors Predictive Maintenance. Applied Sciences, 10(17), 6137. https://doi.org/10.3390/app10176137