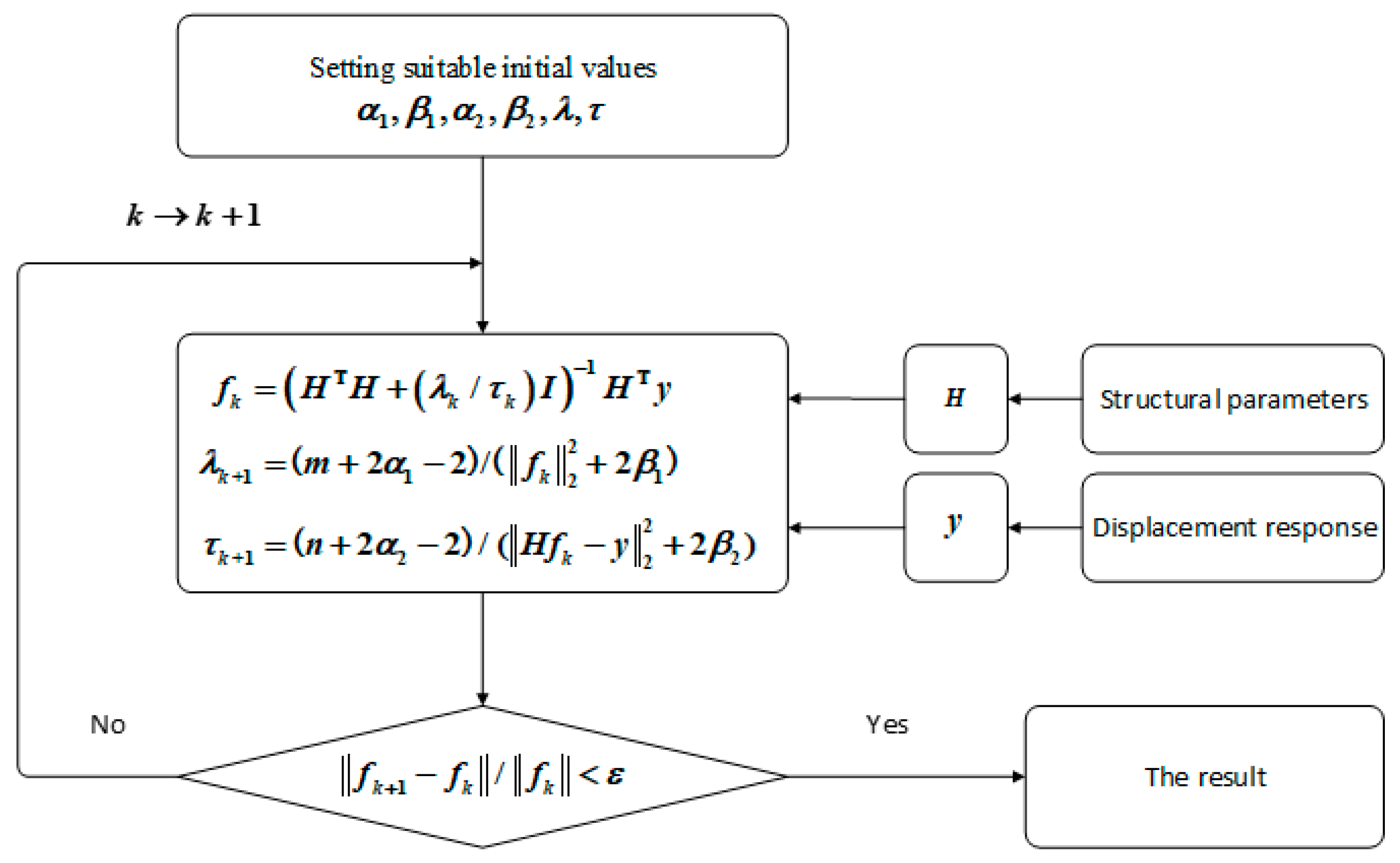
Figure 1.
Load identification flow chart.
Figure 1.
Load identification flow chart.
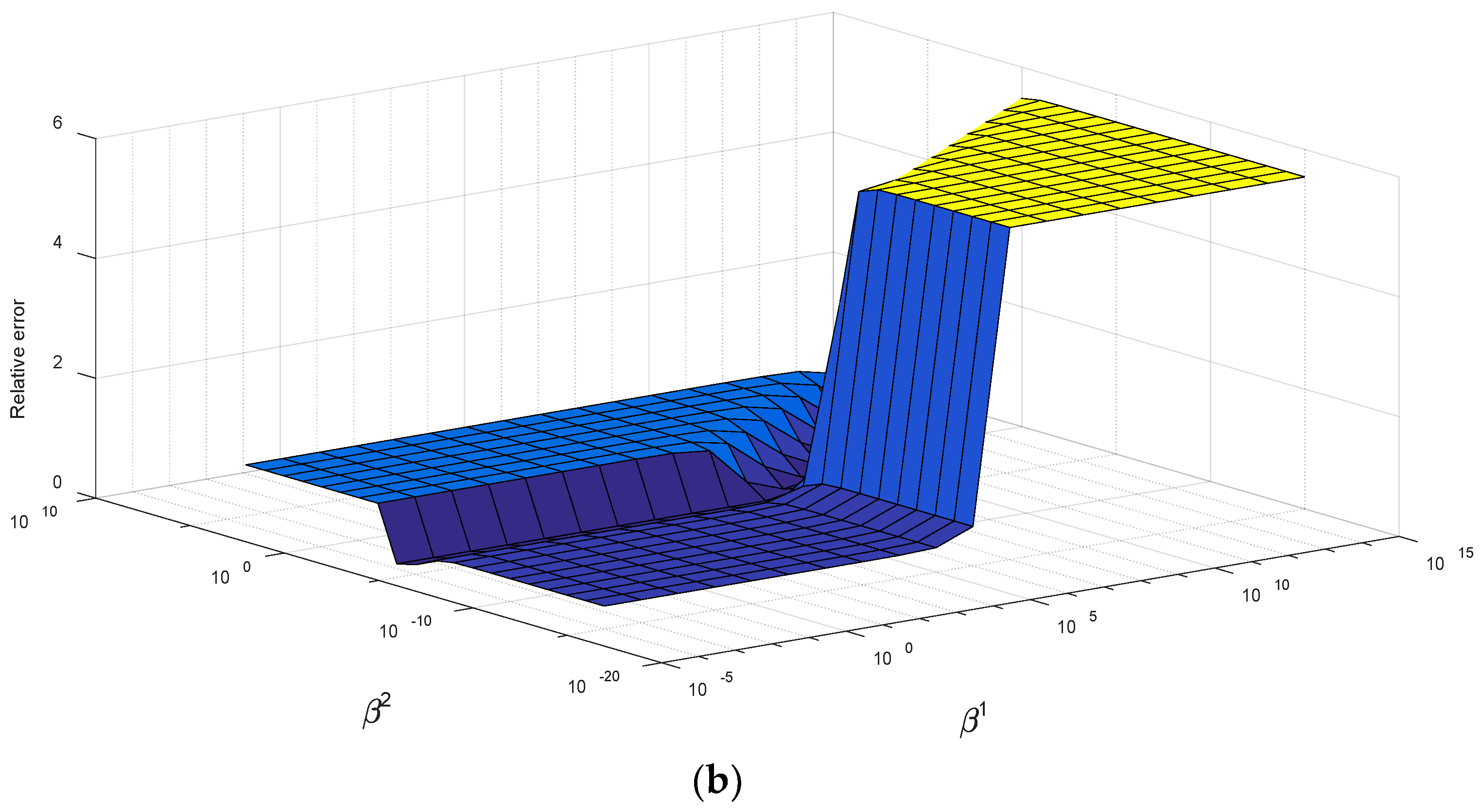
Figure 2.
(a) Correlation coefficient varies with the . (b) Relative error varies with the .
Figure 2.
(a) Correlation coefficient varies with the . (b) Relative error varies with the .
Figure 3.
(a) selection with the response noise level known. (b) selection with the response noise level unknown.
Figure 3.
(a) selection with the response noise level known. (b) selection with the response noise level unknown.
Figure 4.
Four-degree-of-freedom system.
Figure 4.
Four-degree-of-freedom system.
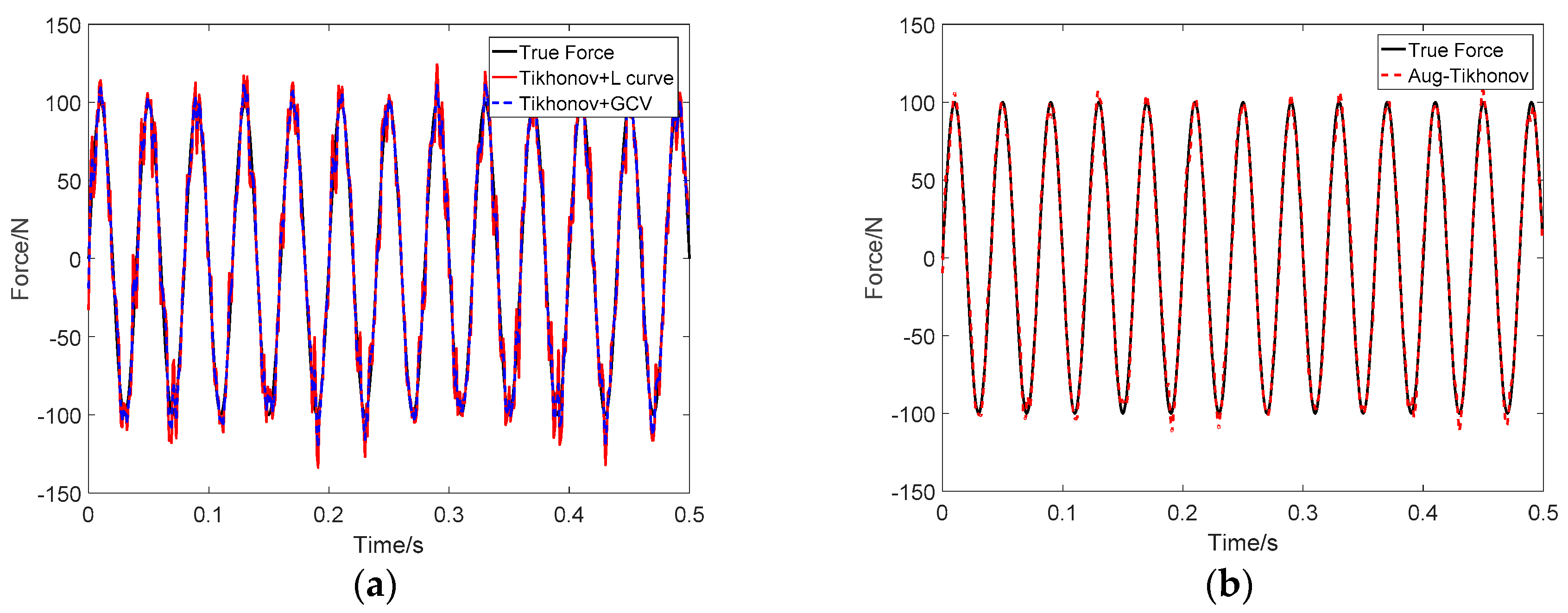
Figure 5.
Identification result of sinusoidal load at SNR 40 dB: (a) Tikhonov method; (b) the proposed method.
Figure 5.
Identification result of sinusoidal load at SNR 40 dB: (a) Tikhonov method; (b) the proposed method.
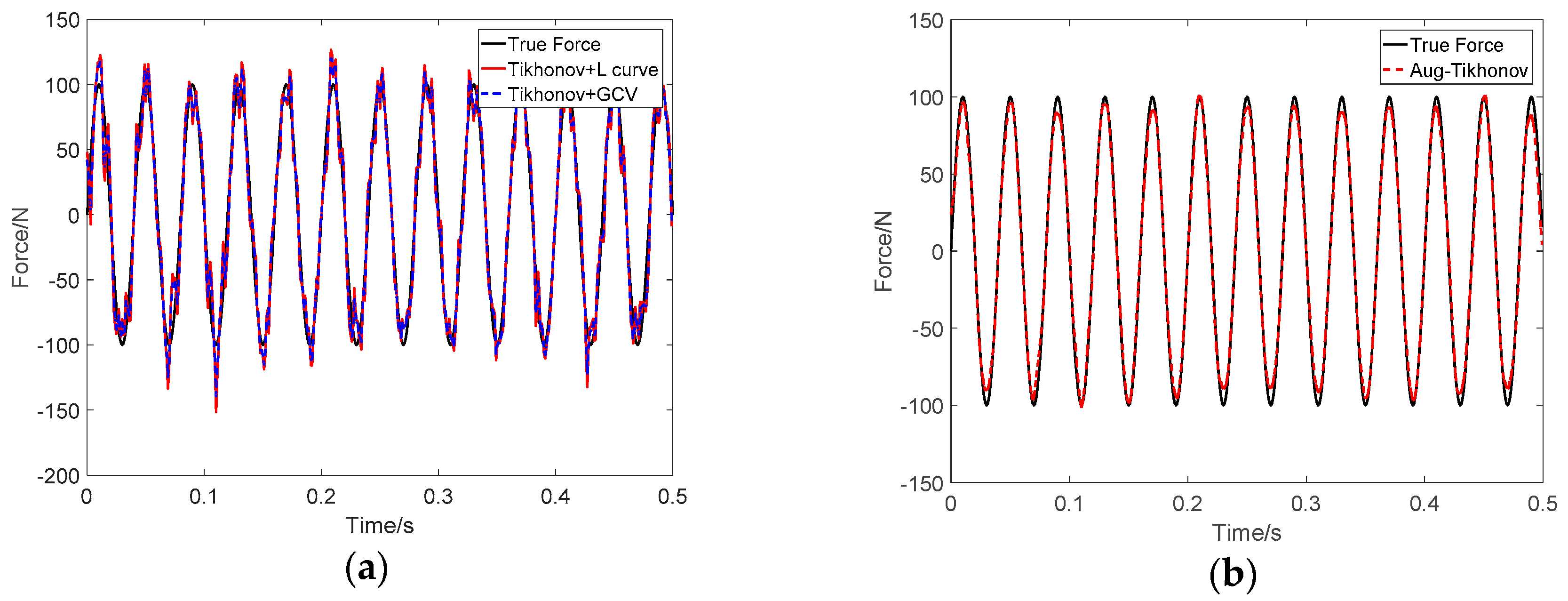
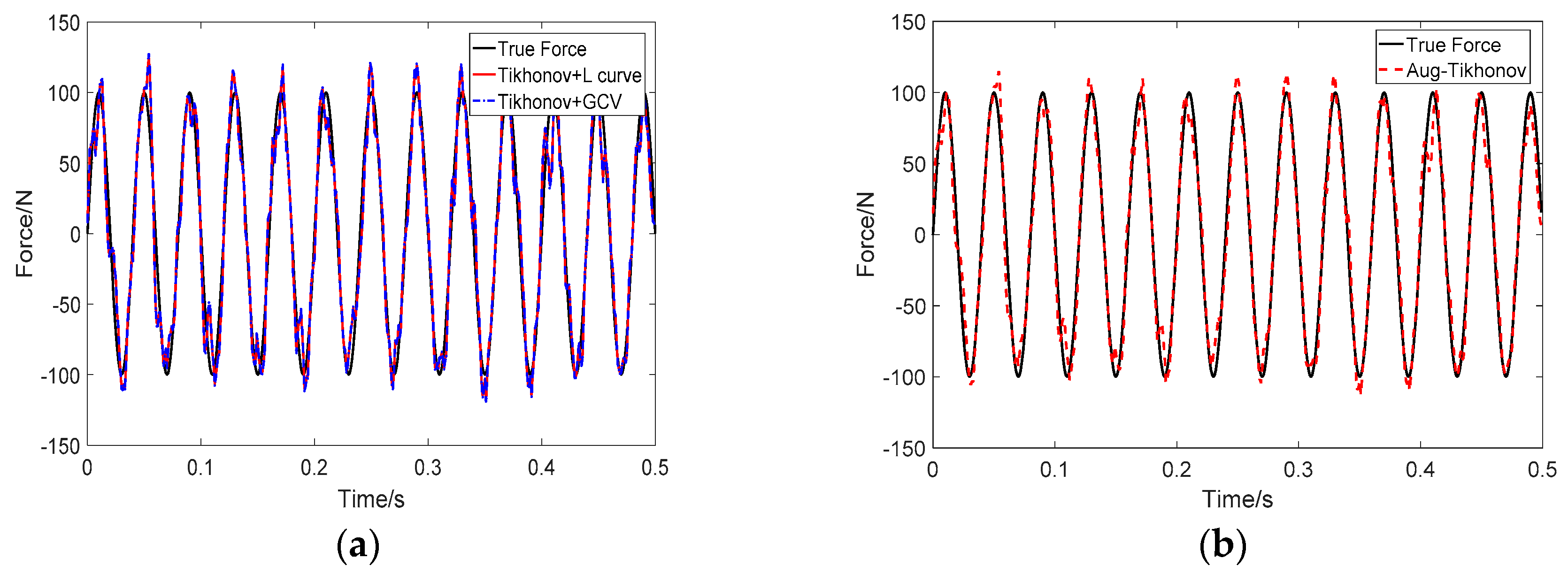
Figure 6.
Identification result of sinusoidal load at SNR 30 dB: (a) Tikhonov method; (b) the proposed method.
Figure 6.
Identification result of sinusoidal load at SNR 30 dB: (a) Tikhonov method; (b) the proposed method.
Figure 7.
Identification result of sinusoidal load at SNR 20 dB: (a) Tikhonov method; (b) the proposed method.
Figure 7.
Identification result of sinusoidal load at SNR 20 dB: (a) Tikhonov method; (b) the proposed method.
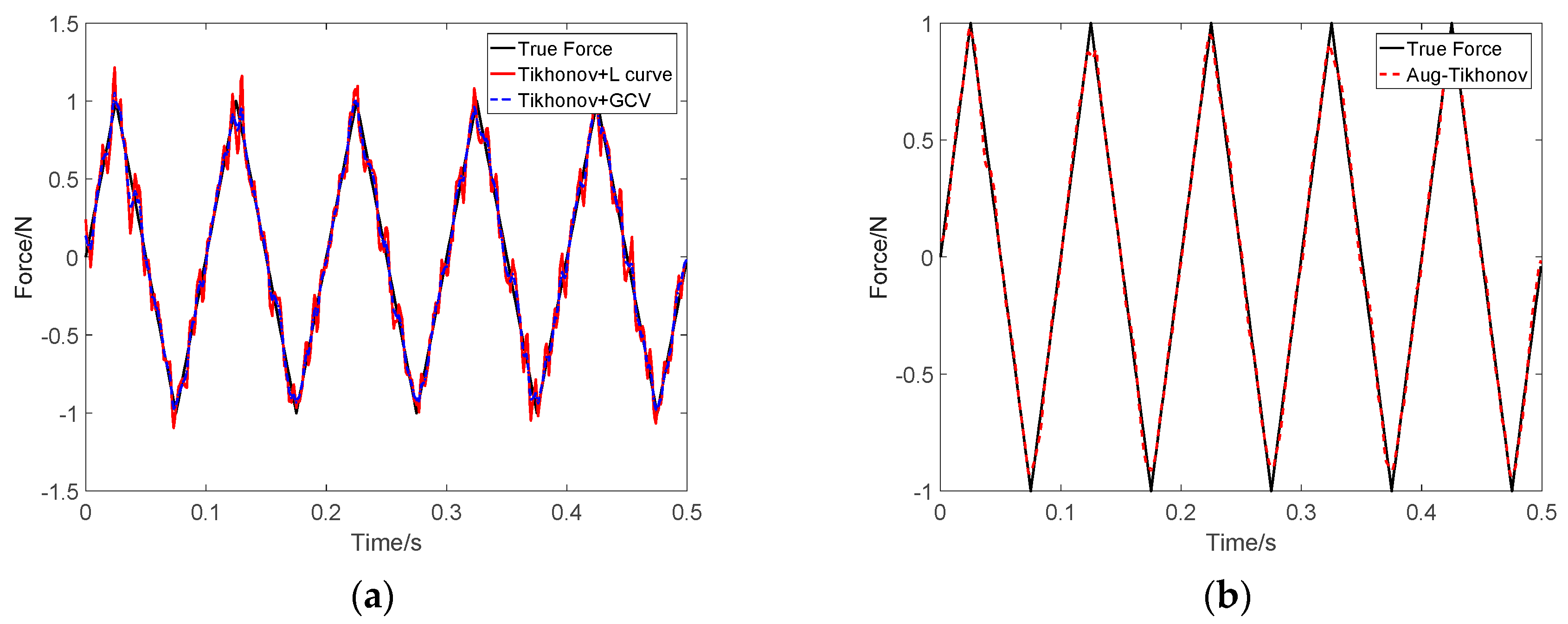
Figure 8.
Identification result of triangle wave load at SNR 40 dB: (a) Tikhonov method; (b) the proposed method.
Figure 8.
Identification result of triangle wave load at SNR 40 dB: (a) Tikhonov method; (b) the proposed method.
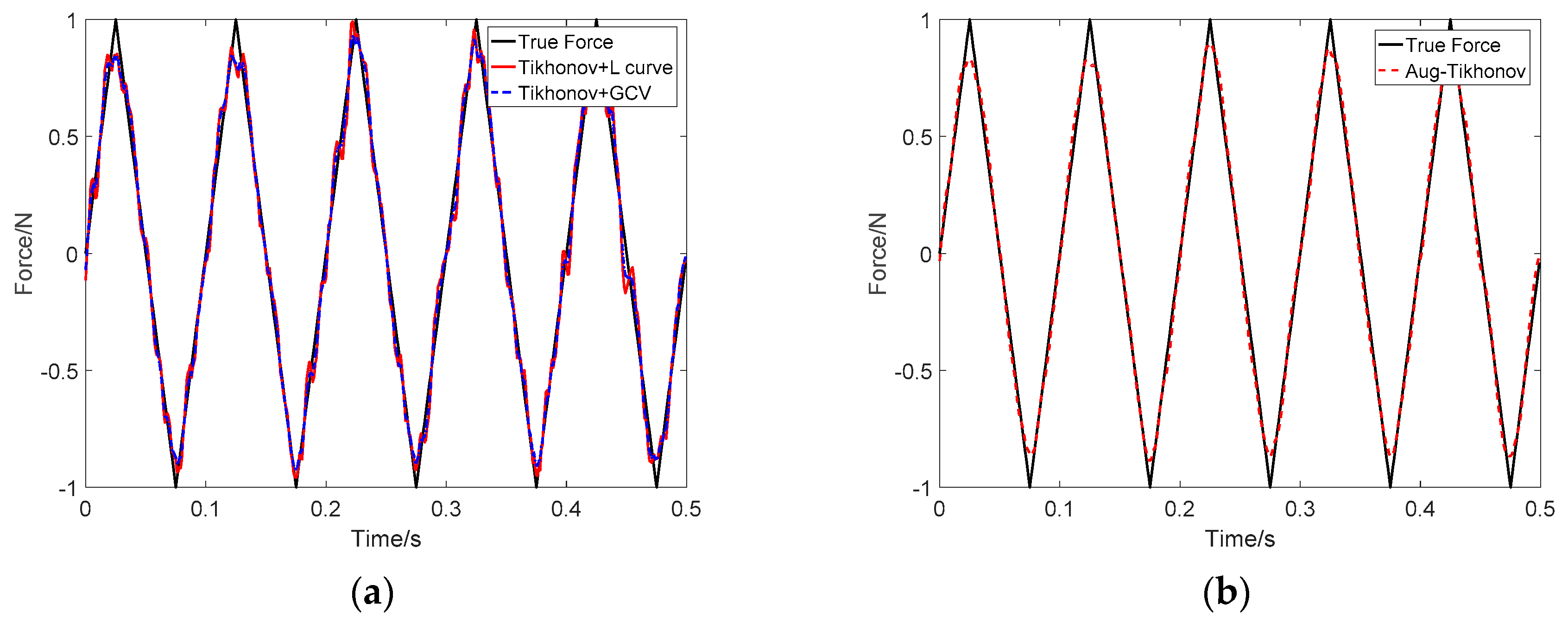
Figure 9.
Identification result of triangle wave load at SNR 30 dB: (a) Tikhonov method; (b) the proposed method.
Figure 9.
Identification result of triangle wave load at SNR 30 dB: (a) Tikhonov method; (b) the proposed method.
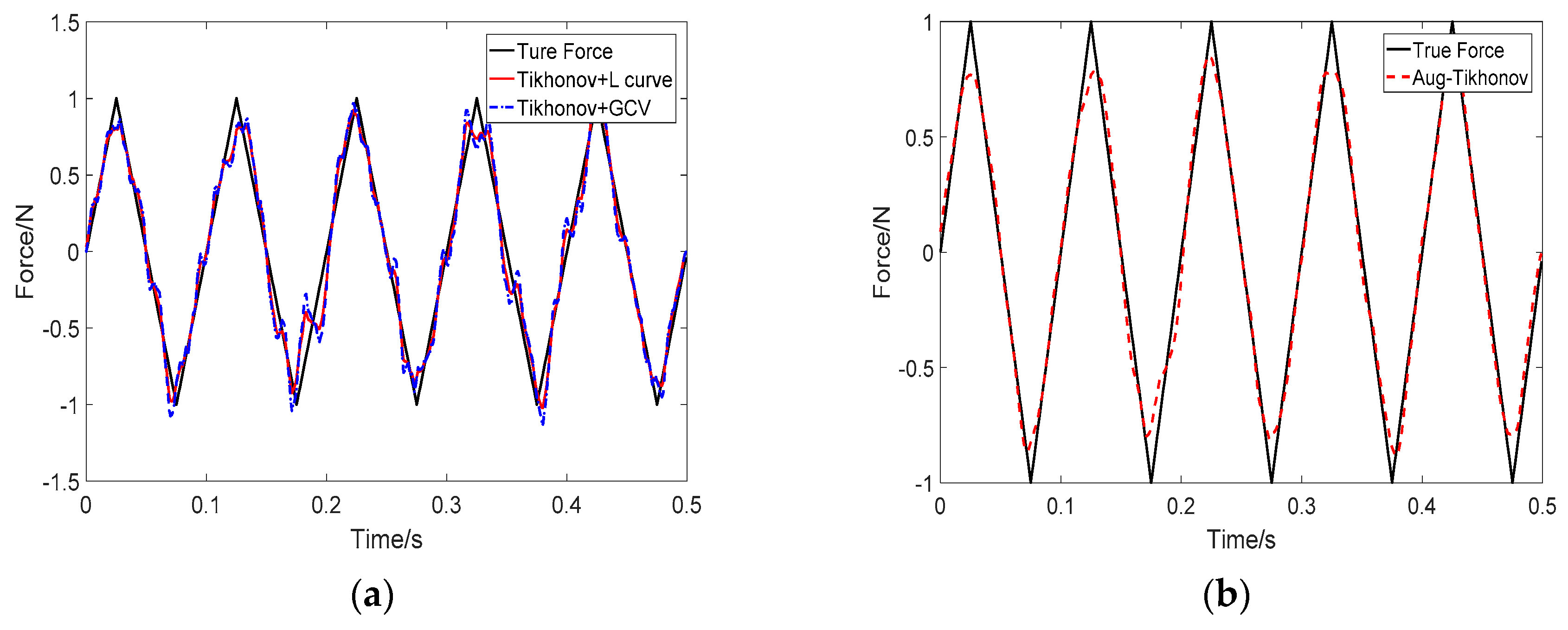
Figure 10.
Identification result of triangle wave load at SNR 20 dB: (a) Tikhonov method; (b) the proposed method.
Figure 10.
Identification result of triangle wave load at SNR 20 dB: (a) Tikhonov method; (b) the proposed method.
Figure 11.
Identification result of impact load at SNR 40 dB: (a) Tikhonov method; (b) the proposed method.
Figure 11.
Identification result of impact load at SNR 40 dB: (a) Tikhonov method; (b) the proposed method.
Figure 12.
Identification result of impact load at SNR 30 dB: (a) Tikhonov method; (b) the proposed method.
Figure 12.
Identification result of impact load at SNR 30 dB: (a) Tikhonov method; (b) the proposed method.
Figure 13.
Identification result of impact load at SNR 20 dB: (a) Tikhonov method; (b) the proposed method.
Figure 13.
Identification result of impact load at SNR 20 dB: (a) Tikhonov method; (b) the proposed method.
Figure 14.
Identification result of two sinusoidal loads at SNR 40 dB (Force 1): (a) Tikhonov method; (b) the proposed method.
Figure 14.
Identification result of two sinusoidal loads at SNR 40 dB (Force 1): (a) Tikhonov method; (b) the proposed method.
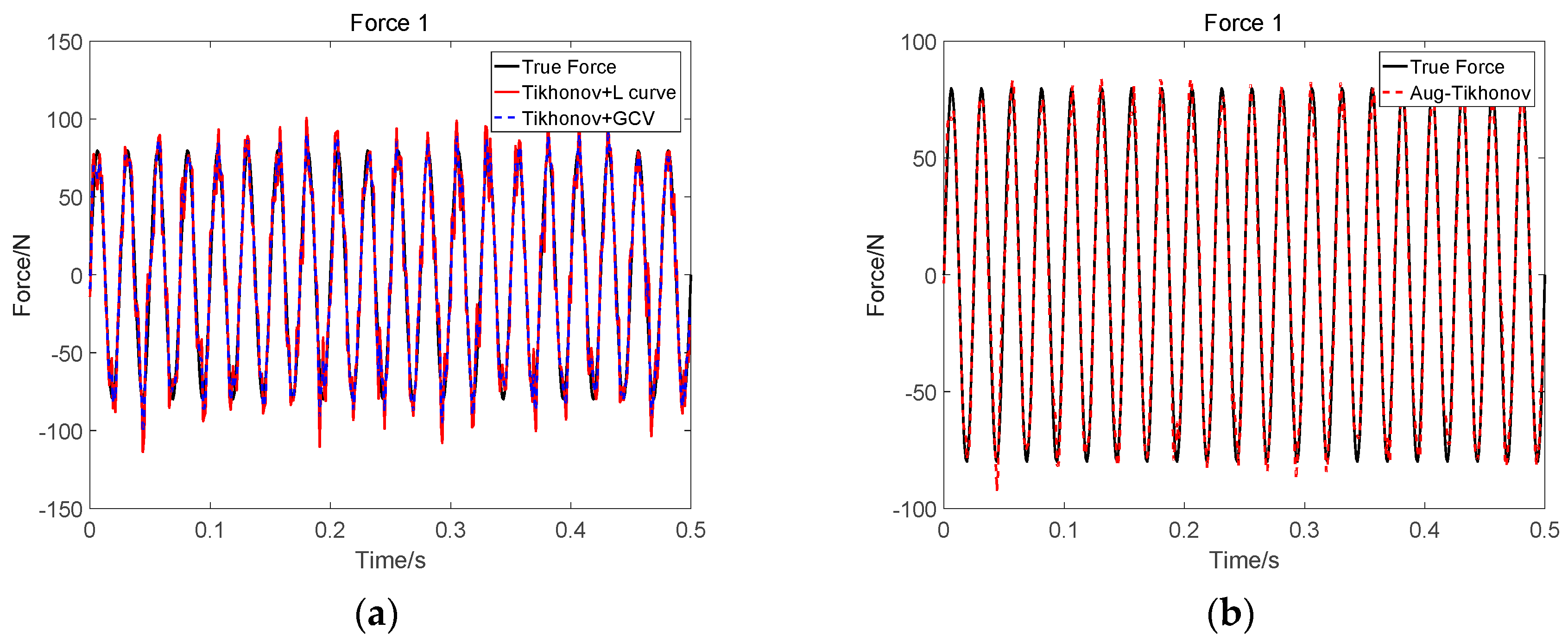
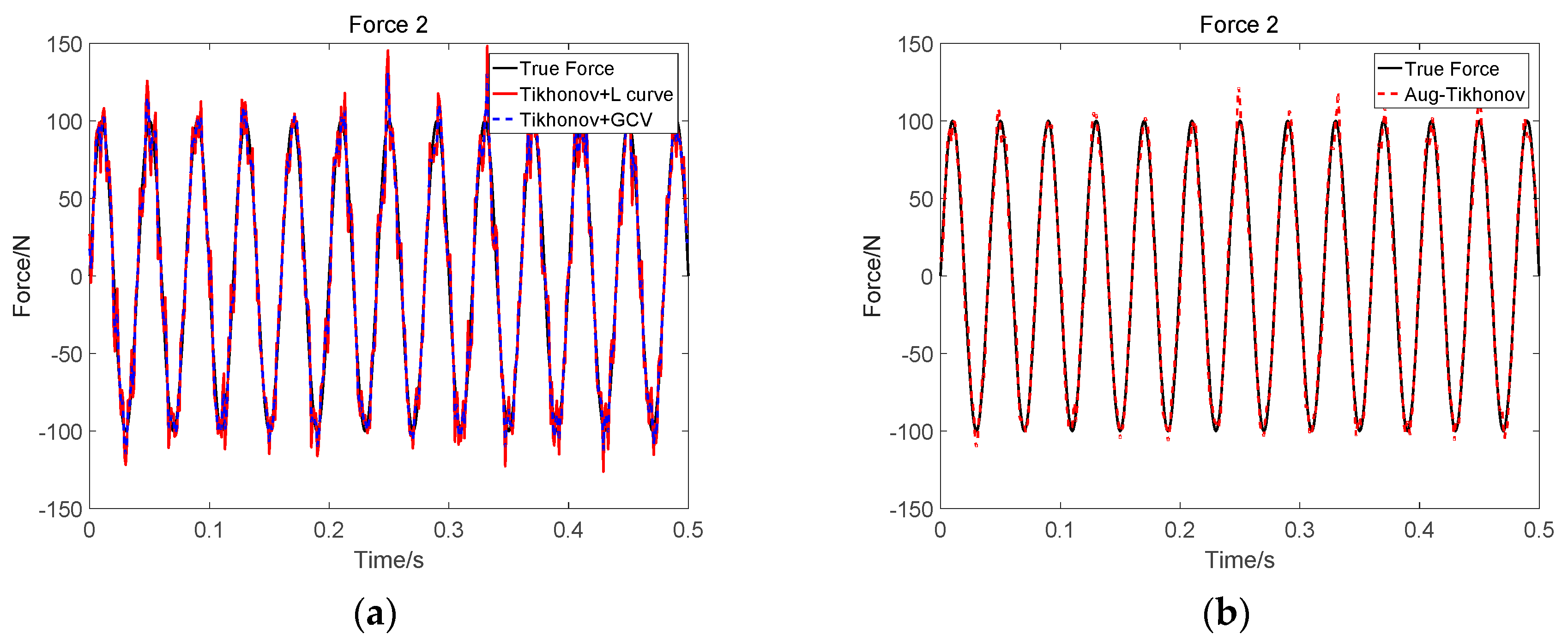
Figure 15.
Identification result of two sinusoidal loads at SNR 40 dB (Force 2): (a) Tikhonov method; (b) the proposed method.
Figure 15.
Identification result of two sinusoidal loads at SNR 40 dB (Force 2): (a) Tikhonov method; (b) the proposed method.
Figure 16.
Identification result of two sinusoidal loads at SNR 30 dB (Force 1): (a) Tikhonov method; (b) the proposed method.
Figure 16.
Identification result of two sinusoidal loads at SNR 30 dB (Force 1): (a) Tikhonov method; (b) the proposed method.
Figure 17.
Identification result of two sinusoidal loads at SNR 30 dB (Force 2): (a) Tikhonov method; (b) the proposed method.
Figure 17.
Identification result of two sinusoidal loads at SNR 30 dB (Force 2): (a) Tikhonov method; (b) the proposed method.
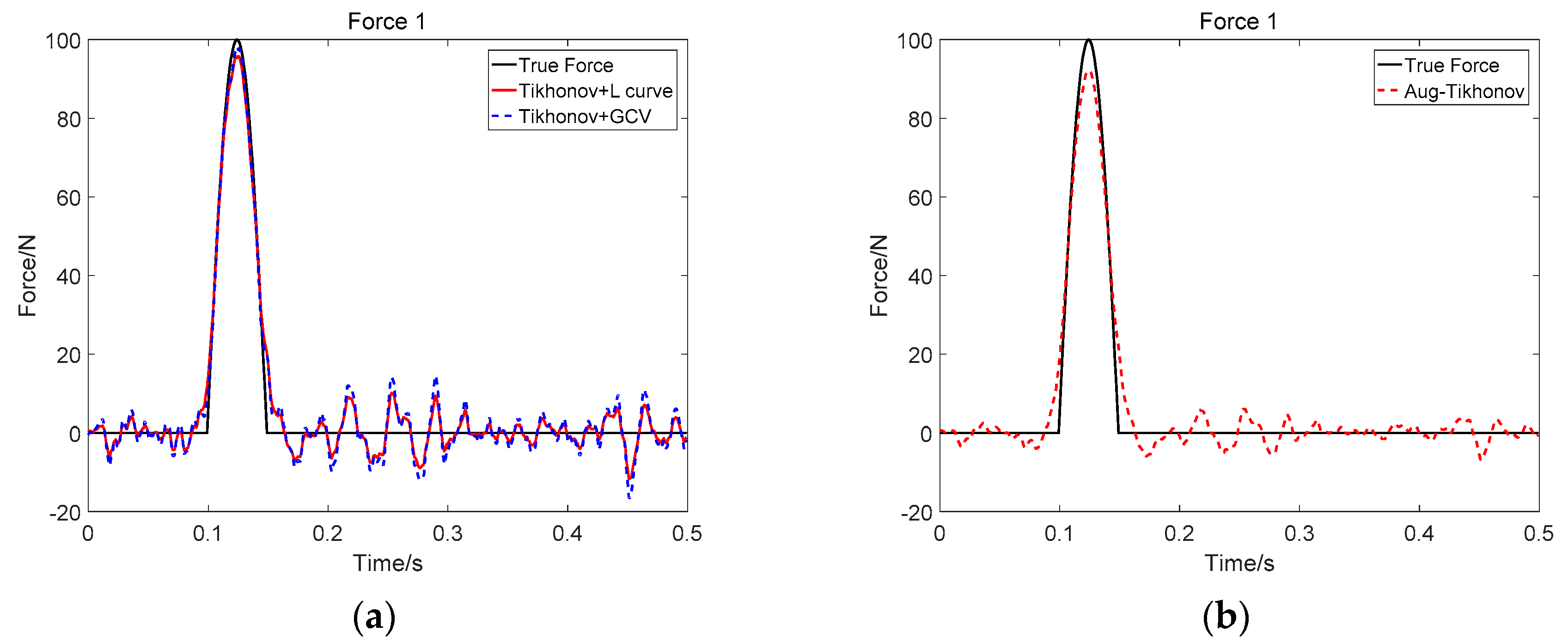
Figure 18.
Identification result of two impact loads at SNR 40 dB (Force 1): (a) Tikhonov method; (b) the proposed method.
Figure 18.
Identification result of two impact loads at SNR 40 dB (Force 1): (a) Tikhonov method; (b) the proposed method.
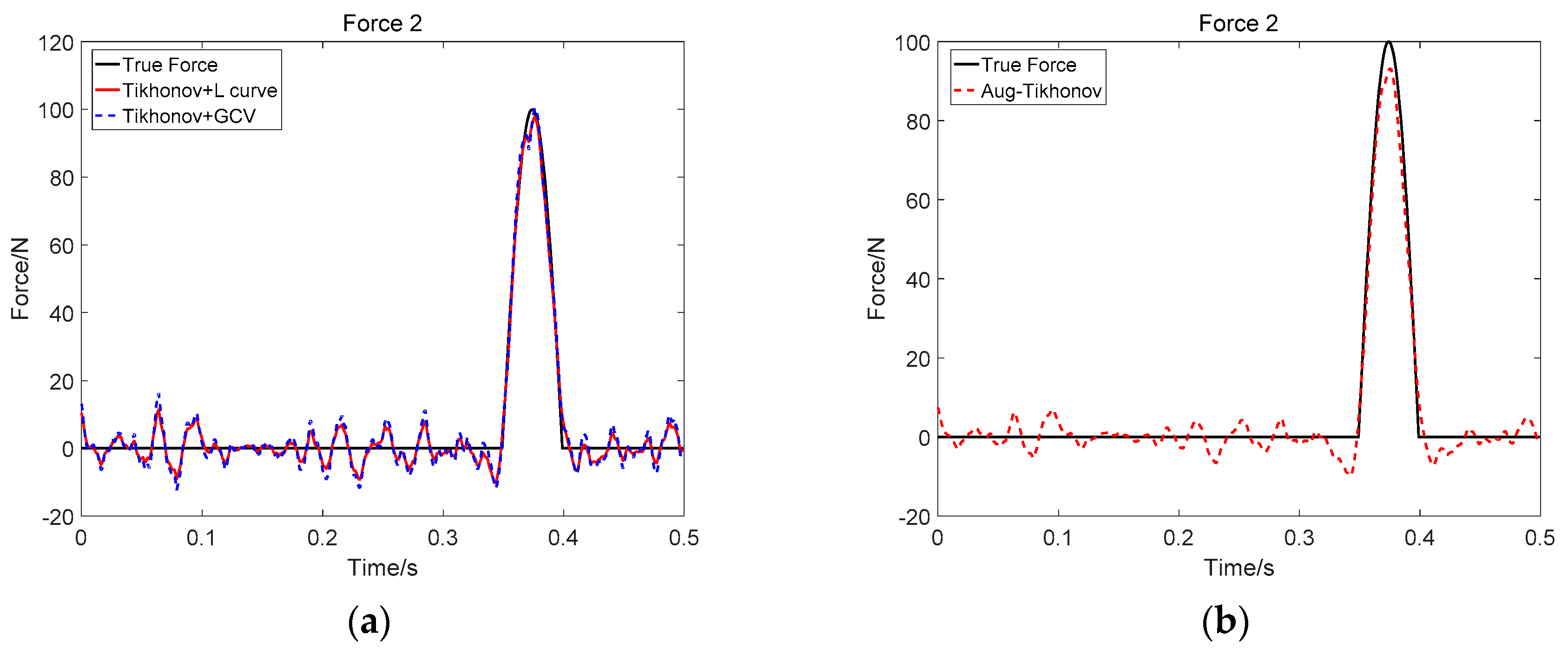
Figure 19.
Identification result of two impact loads at SNR 40 dB (Force 2): (a) Tikhonov method; (b) the proposed method.
Figure 19.
Identification result of two impact loads at SNR 40 dB (Force 2): (a) Tikhonov method; (b) the proposed method.
Figure 20.
Identification result of two impact loads at SNR 30 dB (Force 1): (a) Tikhonov method; (b) the proposed method.
Figure 20.
Identification result of two impact loads at SNR 30 dB (Force 1): (a) Tikhonov method; (b) the proposed method.
Figure 21.
Identification result of two impact loads at SNR 30 dB (Force 2): (a) Tikhonov method; (b) the proposed method.
Figure 21.
Identification result of two impact loads at SNR 30 dB (Force 2): (a) Tikhonov method; (b) the proposed method.
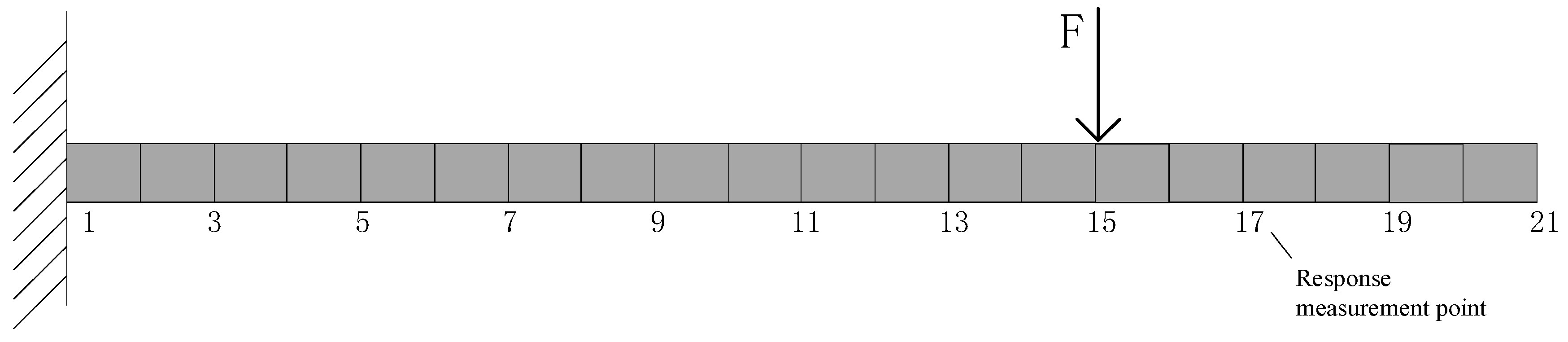
Figure 22.
Cantilever model.
Figure 22.
Cantilever model.
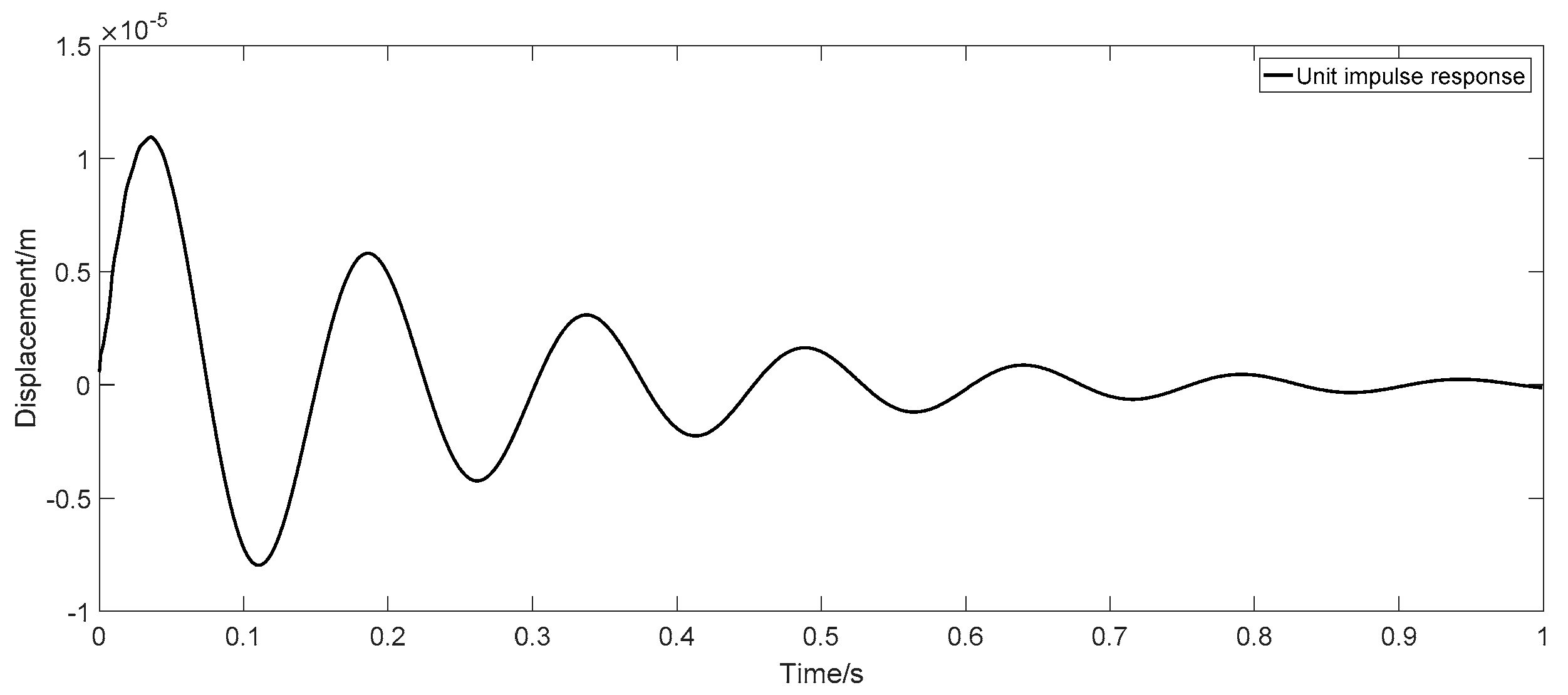
Figure 23.
Unit impulse response diagram.
Figure 23.
Unit impulse response diagram.
Figure 24.
Identification result of sinusoidal load at SNR 40 dB on cantilever: (a) Tikhonov method; (b) the proposed method.
Figure 24.
Identification result of sinusoidal load at SNR 40 dB on cantilever: (a) Tikhonov method; (b) the proposed method.
Figure 25.
Identification result of sinusoidal load at SNR 30 dB on cantilever: (a) Tikhonov method; (b) the proposed method.
Figure 25.
Identification result of sinusoidal load at SNR 30 dB on cantilever: (a) Tikhonov method; (b) the proposed method.
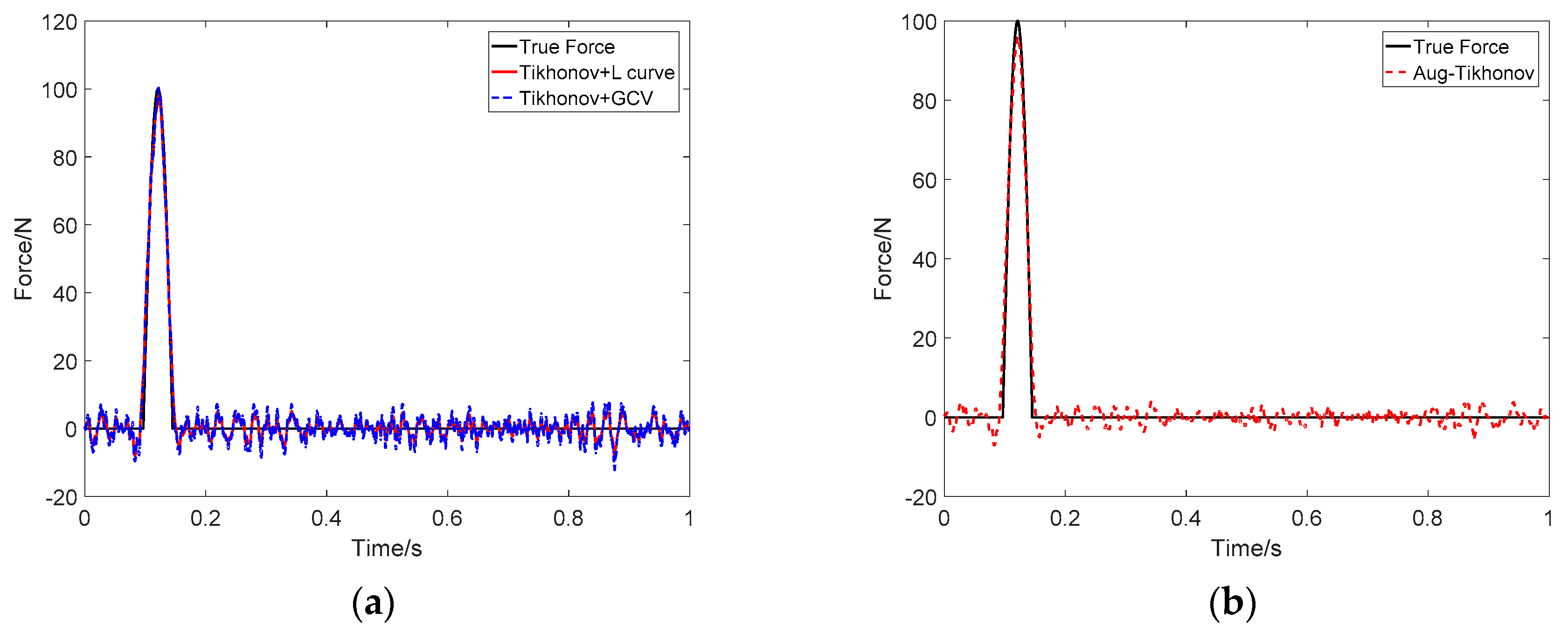
Figure 26.
Identification result of impact load at SNR 40 dB on cantilever: (a) Tikhonov method; (b) the proposed method.
Figure 26.
Identification result of impact load at SNR 40 dB on cantilever: (a) Tikhonov method; (b) the proposed method.
Figure 27.
Identification result of impact load at SNR 30 dB on cantilever: (a) Tikhonov method; (b) the proposed method.
Figure 27.
Identification result of impact load at SNR 30 dB on cantilever: (a) Tikhonov method; (b) the proposed method.
Figure 28.
The impulse response diagram of the simply supported beam.
Figure 28.
The impulse response diagram of the simply supported beam.
Figure 29.
The load identification experiment site.
Figure 29.
The load identification experiment site.
Figure 30.
The displacement response.
Figure 30.
The displacement response.
Figure 31.
ignition value selection: (a) sinusoidal load; (b) triangle wave load.
Figure 31.
ignition value selection: (a) sinusoidal load; (b) triangle wave load.
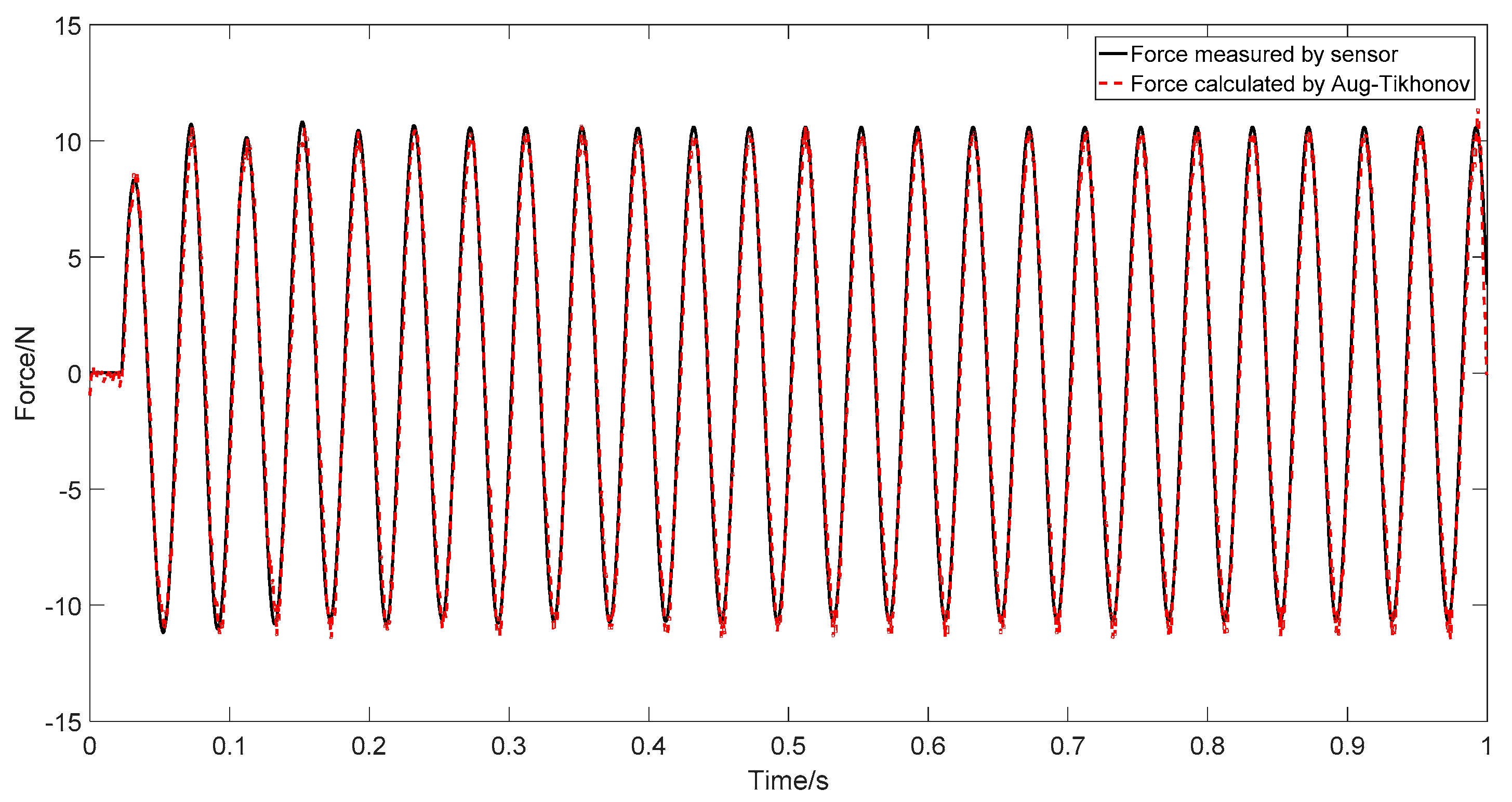
Figure 32.
Identification result of sinusoidal load.
Figure 32.
Identification result of sinusoidal load.
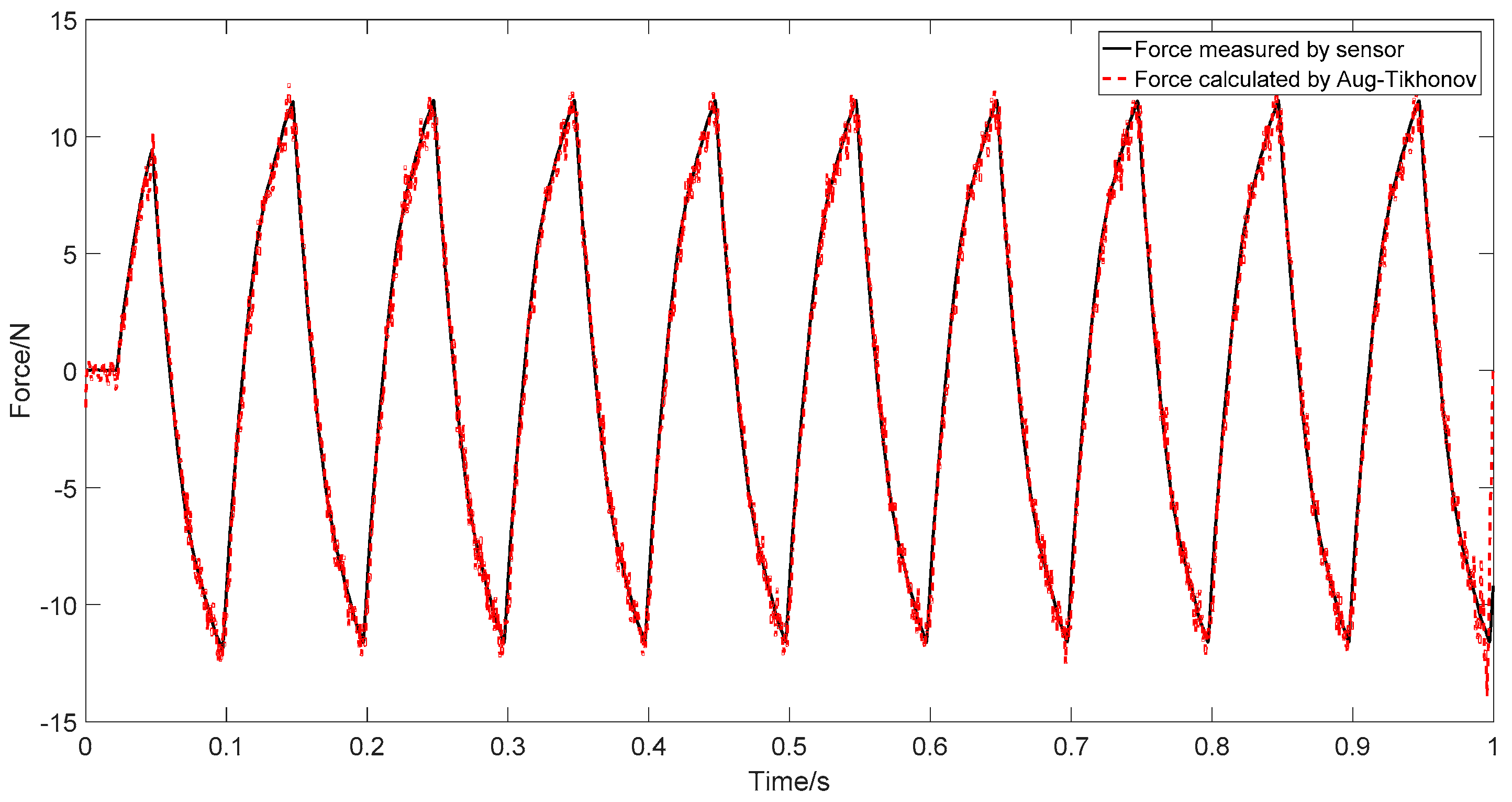
Figure 33.
Identification result of triangle wave load.
Figure 33.
Identification result of triangle wave load.
Table 1.
Force identification results error of four-degree-of-freedom system.
Table 1.
Force identification results error of four-degree-of-freedom system.
| Force | SNR | Tikhonov + L Curve | Tikhonov + GCV | Augmented Tikhonov |
|---|
| r | RE | r | RE | r | RE |
|---|
| sinusoidal load | 40 | 87.83% | 20.50% | 95.30% | 11.25% | 99.74% | 7.18% |
| 30 | 82.34% | 23.01% | 89.10% | 18.21% | 99.84% | 7.94% |
| 20 | 96.93% | 22.31% | 90.44% | 23.58% | 98.30% | 18.38% |
| Triangle load | 40 | 90.99% | 18.13% | 97.50% | 8.87% | 99.82% | 6.03% |
| 30 | 97.25% | 12.69% | 99.50% | 9.42% | 99.65% | 8.43% |
| 20 | 98.29% | 17.86% | 96.55% | 23.41% | 99.18% | 14.06% |
| Impact load | 40 | 97.91% | 16.58% | 96.03% | 16.58% | 99.64% | 8.47% |
| 30 | 96.16% | 21.04% | 96.13% | 23.32% | 98.45% | 16.99% |
| 20 | 80.48% | 28.96% | 80.51% | 44.53% | 96.02% | 27.82% |
Table 2.
Identification effect of two sinusoidal loads.
Table 2.
Identification effect of two sinusoidal loads.
| SNR | Force | Tikhonov + L Curve | Tikhonov + GCV | Augmented Tikhonov |
|---|
| r | RE | r | RE | r | RE |
|---|
| 40 dB | Force 1 | 96.91% | 25.22% | 98.69% | 16.14% | 99.38% | 11.24% |
| Force 2 | 97.81% | 21.25% | 99.06% | 13.78% | 99.55% | 9.52% |
| 30 dB | Force 1 | 96.33% | 27.16% | 97.03% | 24.26% | 98.21% | 19.02% |
| Force 2 | 97.02% | 24.92% | 97.65% | 22.01% | 98.72% | 16.12% |
Table 3.
Identification effect of two impact loads.
Table 3.
Identification effect of two impact loads.
| SNR | Force | Tikhonov + L Curve | Tikhonov + GCV | Augmented Tikhonov |
|---|
| r | RE | r | RE | r | RE |
|---|
| 40 dB | Force 1 | 98.49% | 16.75% | 98.49% | 16.75% | 99.18% | 12.29% |
| Force 2 | 98.72% | 15.39% | 98.72% | 15.39% | 99.33% | 11.11% |
| 30 dB | Force 1 | 98.09% | 18.65% | 97.11% | 22.98% | 98.44% | 17.30% |
| Force 2 | 98.47% | 16.80% | 97.59% | 21.19% | 98.93% | 15.46% |
Table 4.
Force identification effect of cantilever.
Table 4.
Force identification effect of cantilever.
| Force | SNR | Tikhonov + L Curve | Tikhonov + GCV | Augmented Tikhonov |
|---|
| r | RE | r | RE | r | RE |
|---|
| sinusoidal load | 40 | 69.91% | 54.04% | 68.05% | 12.07% | 99.72% | 7.45% |
| 30 | 98.18% | 26.81% | 87.32% | 20.40% | 99.20% | 12.66% |
| Impact load | 40 | 97.49% | 16.04% | 96.26% | 16.04% | 99.44% | 10.33% |
| 30 | 97.36% | 16.67% | 95.97% | 21.91% | 98.86% | 14.83% |
Table 5.
Parameter table of simply supported beam.
Table 5.
Parameter table of simply supported beam.
| Parameters | Value |
|---|
| Length | 0.7 m |
| Width | 0.04 m |
| Thickness | 0.008 m |
| Density | 7800 kg/m3 |
| Elastic Modulus | 209 GPa |
| Poisson’s ratio | 0.30 |
Table 6.
The comparison of natural frequencies of the beam.
Table 6.
The comparison of natural frequencies of the beam.
| Mode | Experimental Natural Frequency (Hz) | Simulation Natural Frequency (Hz) | Relative Error (%) |
|---|
| 1 | 38.13 | 38.07 | 0.15 |
| 2 | 150.35 | 152.19 | 1.22 |
| 3 | 334.63 | 341.93 | 2.18 |
| 4 | 593.00 | 605.92 | 2.18 |
Table 7.
Force identification experiment equipment.
Table 7.
Force identification experiment equipment.
| Equipment | Name |
|---|
| Excitation | JZT-2 Permanent magnet exciter |
| Power amplifier | HEAS-50 Power amplifier |
| Dynamic signal acquisition board | NI PXIe-4499 Capture card |
| Signal acquisition instrument | NI PXI |
| Sensor | optoNCDT2300 Laser displacement sensor |
| Software | NI Signal Express |
Table 8.
Evaluation of identification results of experiment.
Table 8.
Evaluation of identification results of experiment.
| Force | Correlation Coefficient (r) | Relative Error (RE) |
|---|
| Sinusoidal load | 99.42% | 8.07% |
| Triangle wave load | 99.55% | 9.83% |








































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}