A 3-D Simulation of a Single-Sided Linear Induction Motor with Transverse and Longitudinal Magnetic Flux



Abstract
:1. Introduction
2. Original Developed Model
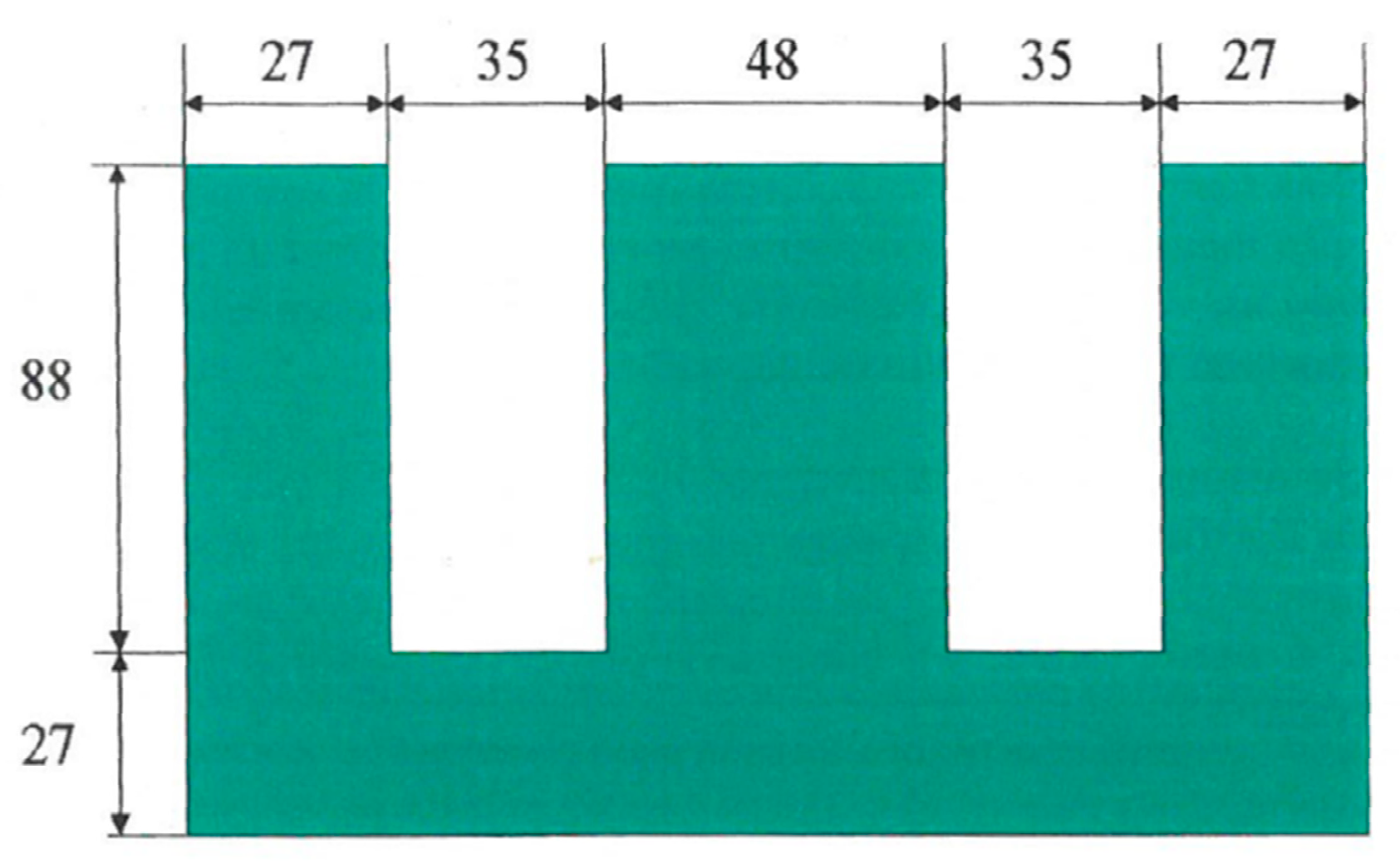
2.1. Geometric Parameters
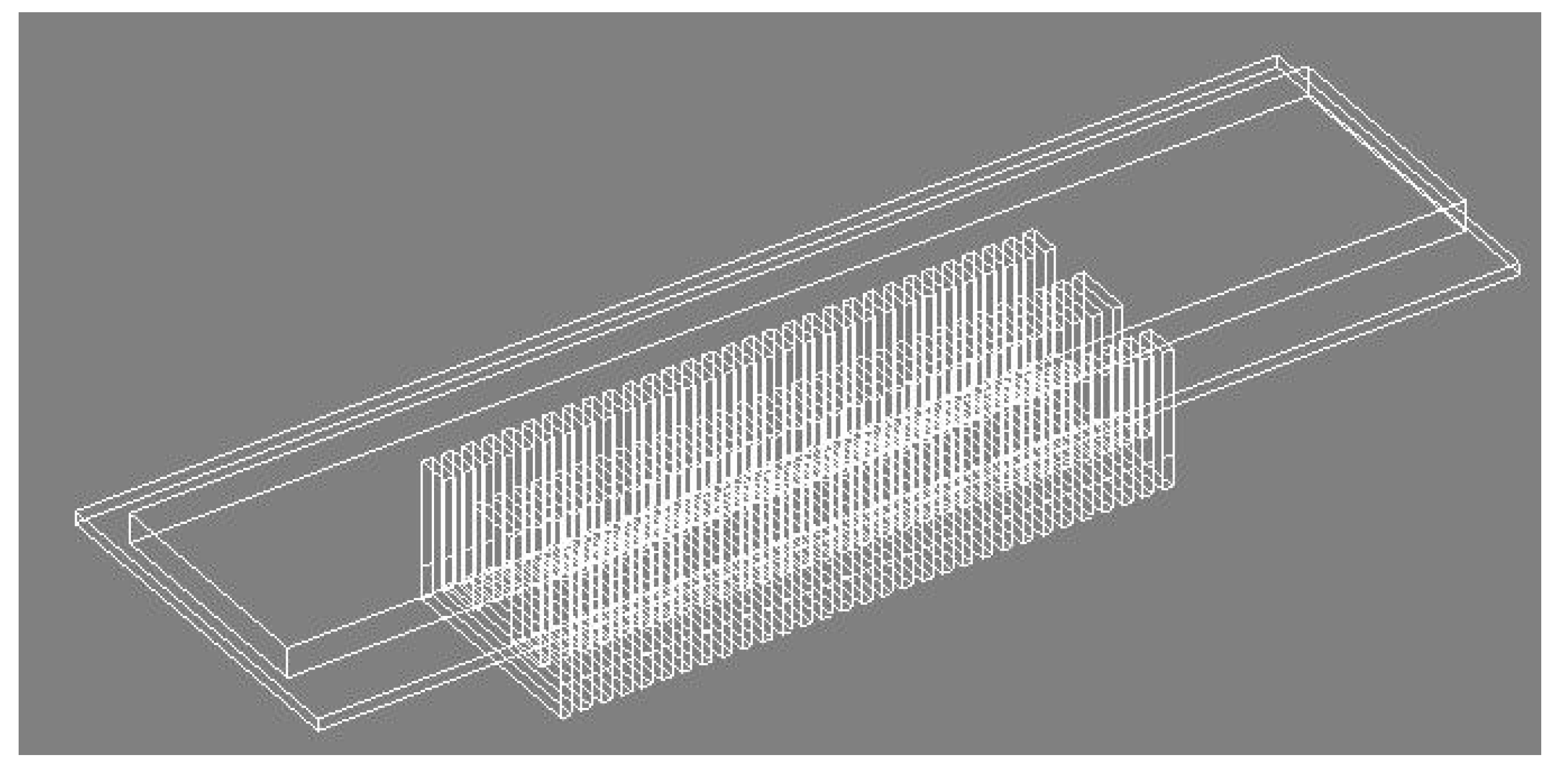
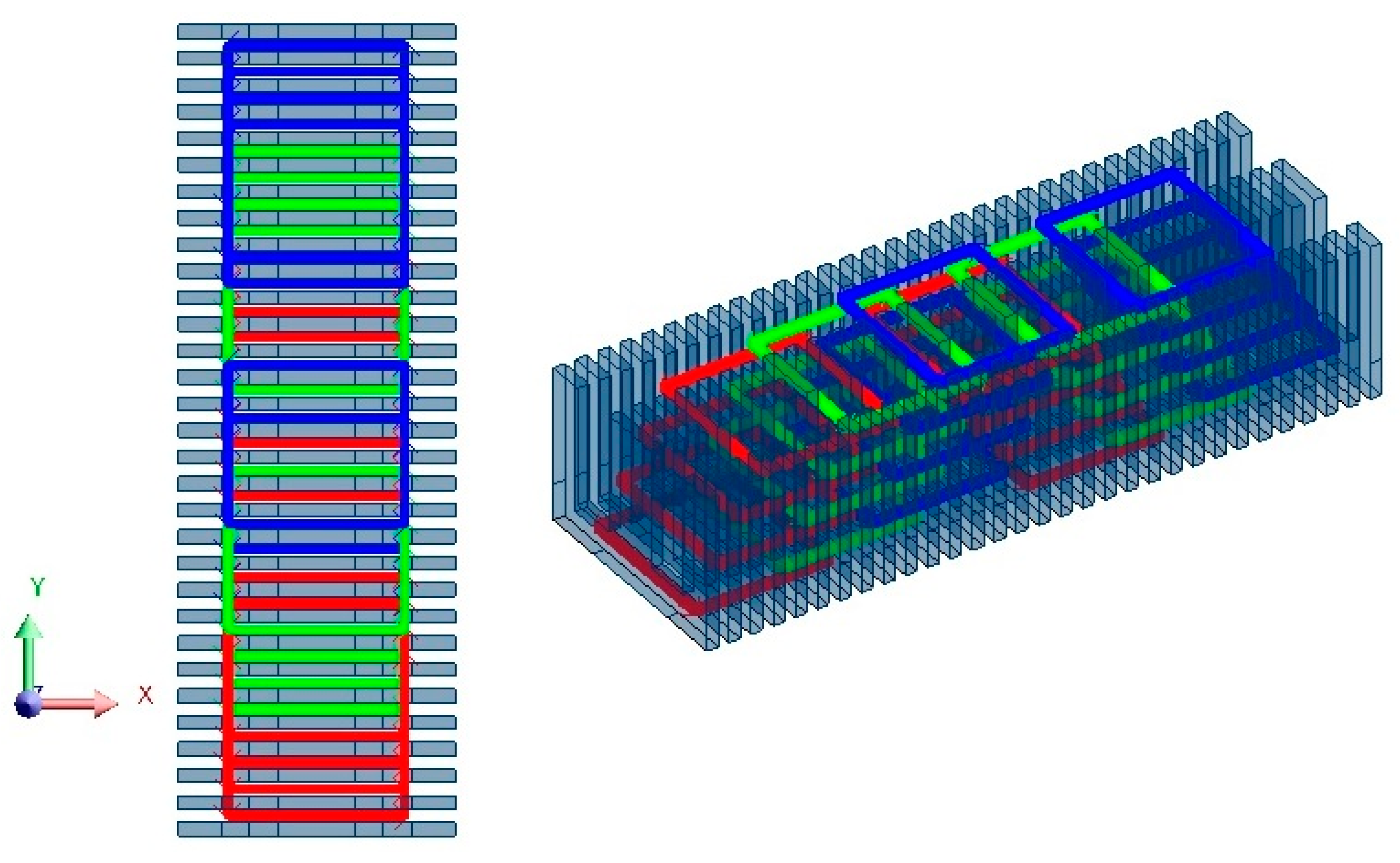
2.2. Graphical View of the Winding in the Primary Part
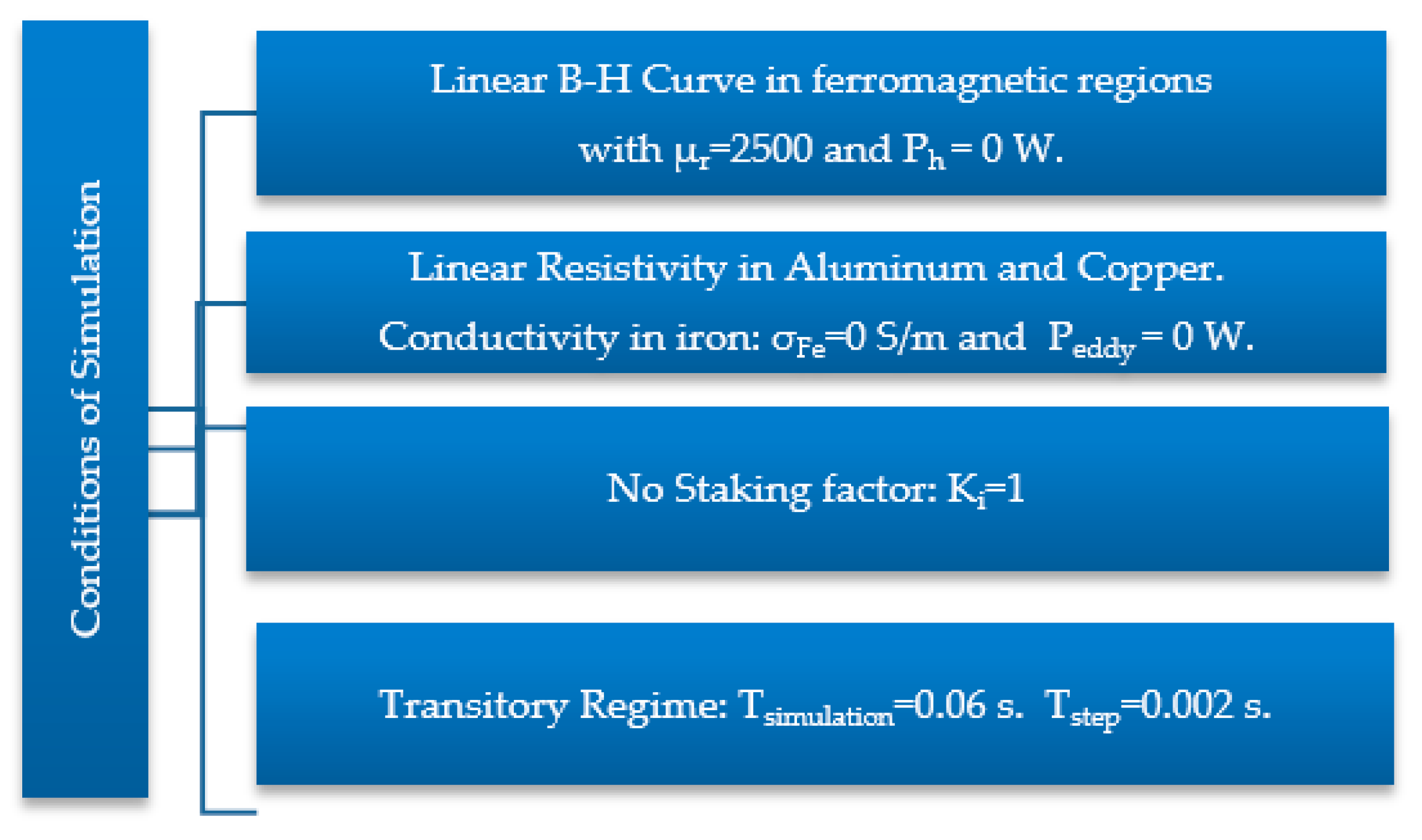
2.3. Electric and Magnetic Properties of the Materials Used in FEM-3D
3. Modified LIM Models and Implementation with FEM-3D
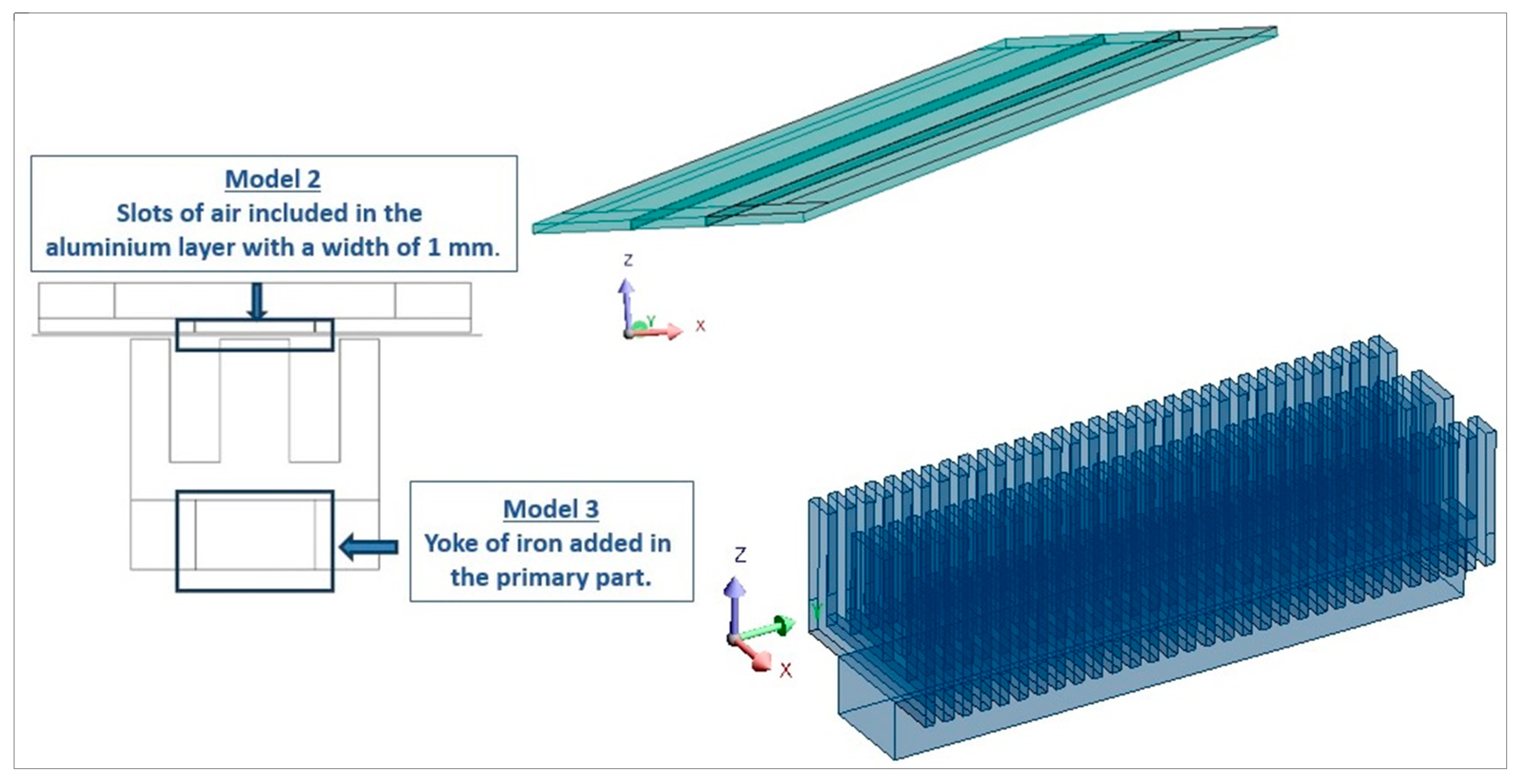
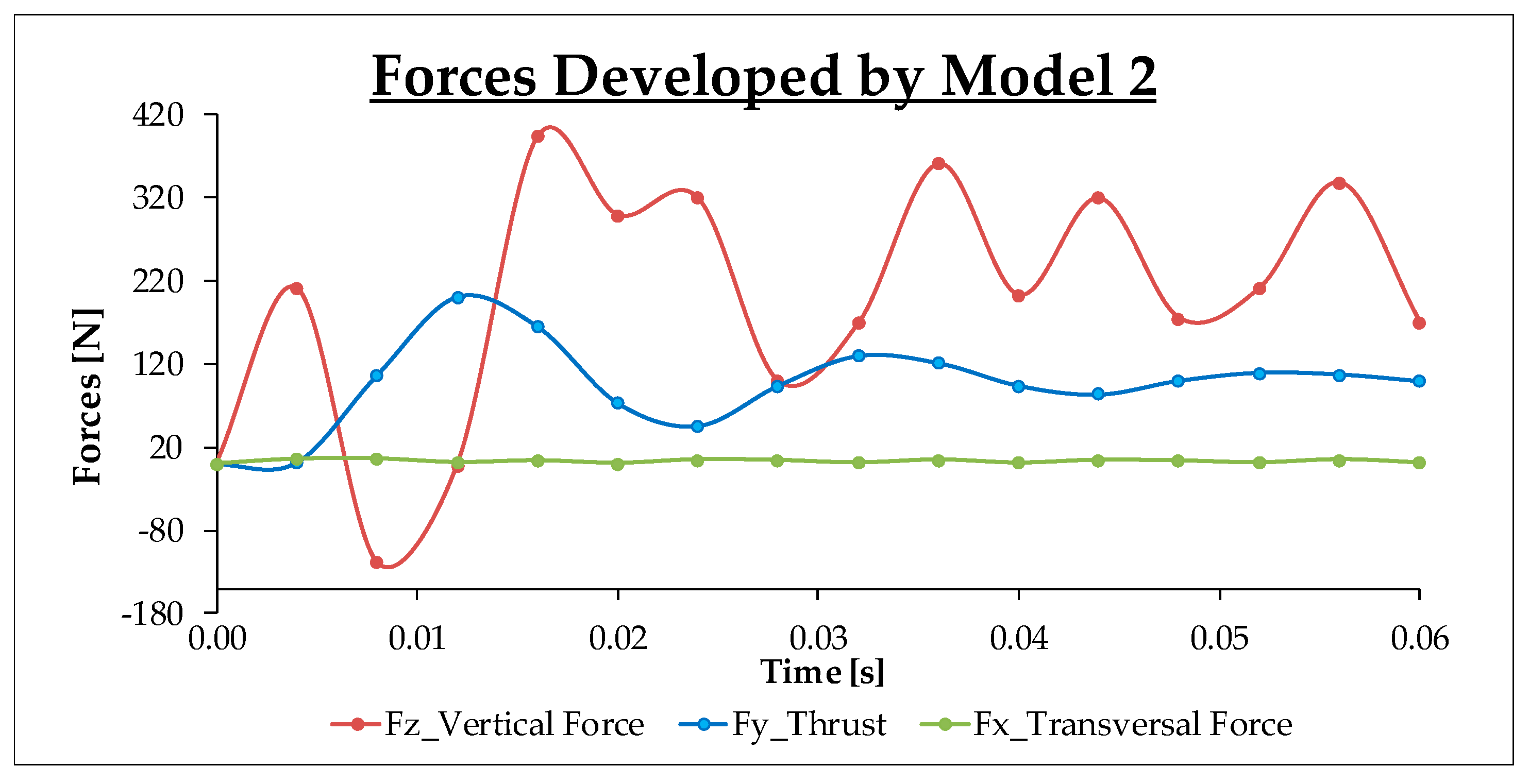
- Model 2, where the moving part was redesigned. More concretely, the aluminum layer was modified with the introduction of two narrow slots of air or diamagnetic material (µr = 1). Each slot has a width of 1 mm and they are located symmetrically at 108 mm from the edge of the aluminum layer (see Figure 6). The new regions, insulated electrically, allowed us to have three regions available inside the aluminum layer with new paths for the eddy currents, so that each zone of aluminum was located above lateral and central teeth. Consequently, the thrust force originated over the lateral teeth developed along the direction of the motion.
- Model 3, where the primary part included a ferromagnetic yoke located under the central teeth. The high of this ferromagnetic block was 50 mm, its width was 83 mm, and it was extended along 503.5 mm that corresponded with the length of the LIM. With this new block, the motor produced a longitudinal flux that operated through the main magnetic circuit with the transversal flux. So, the combined action of these fluxes provided a higher thrust force. Figure 6 shows the changes included in model 2 and model 3.
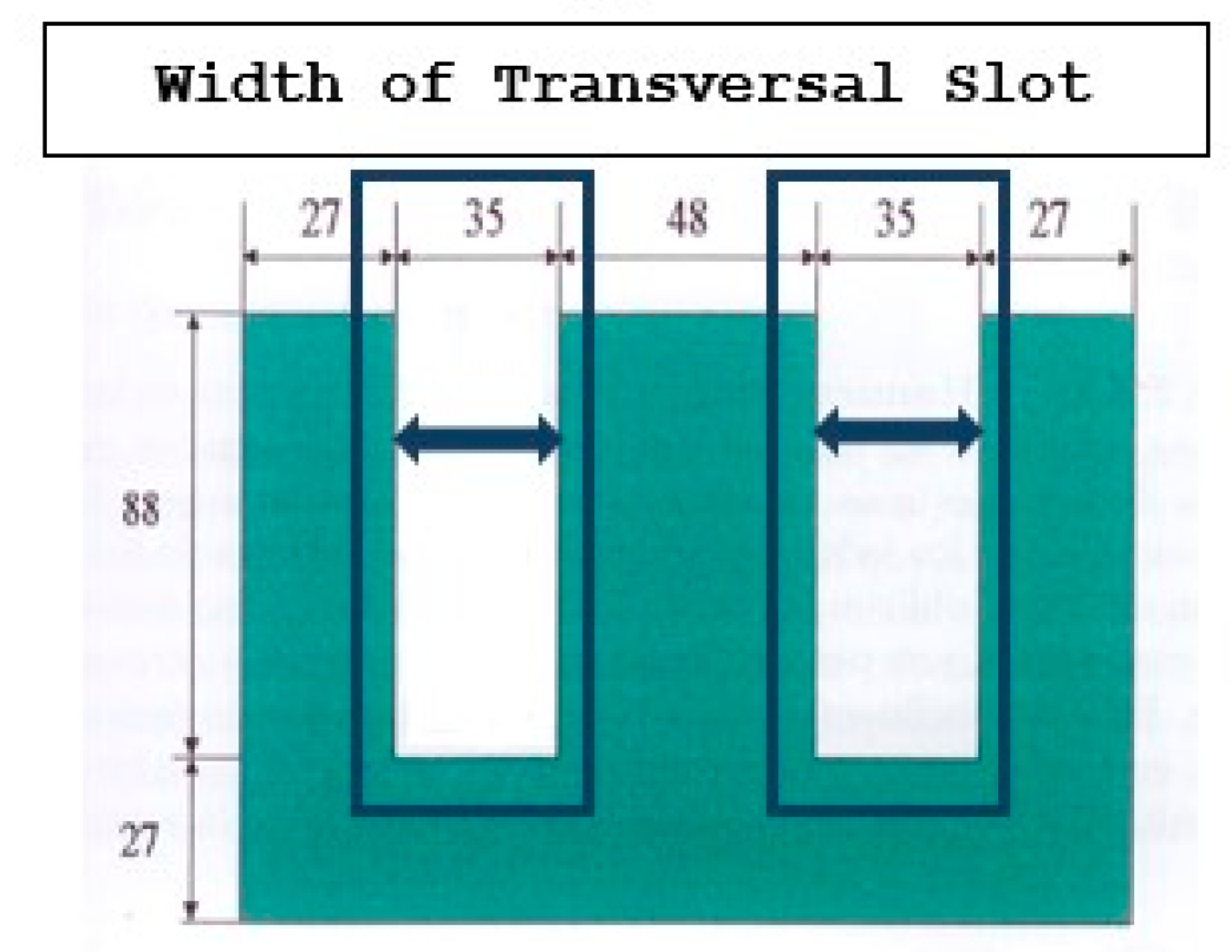
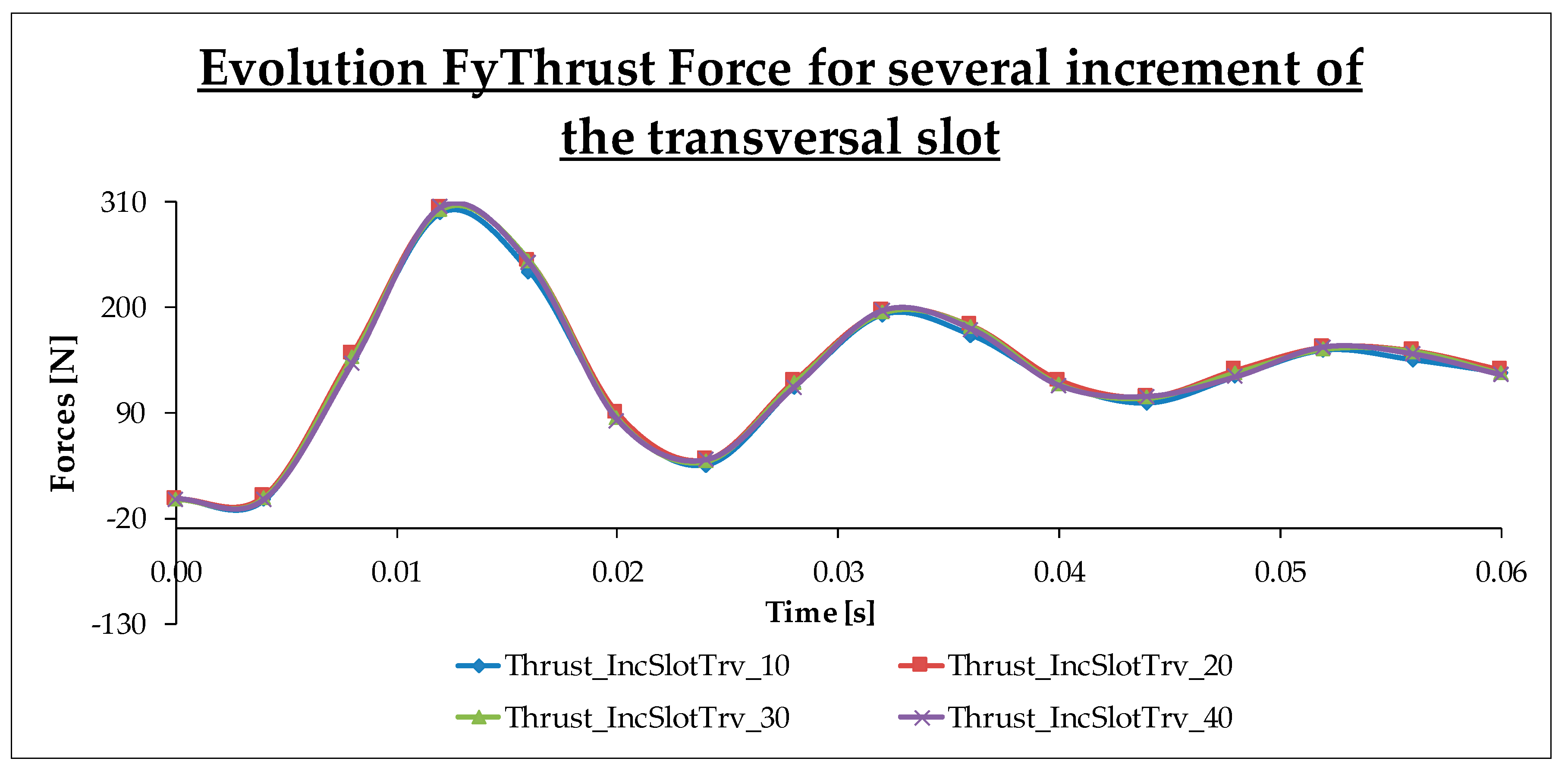
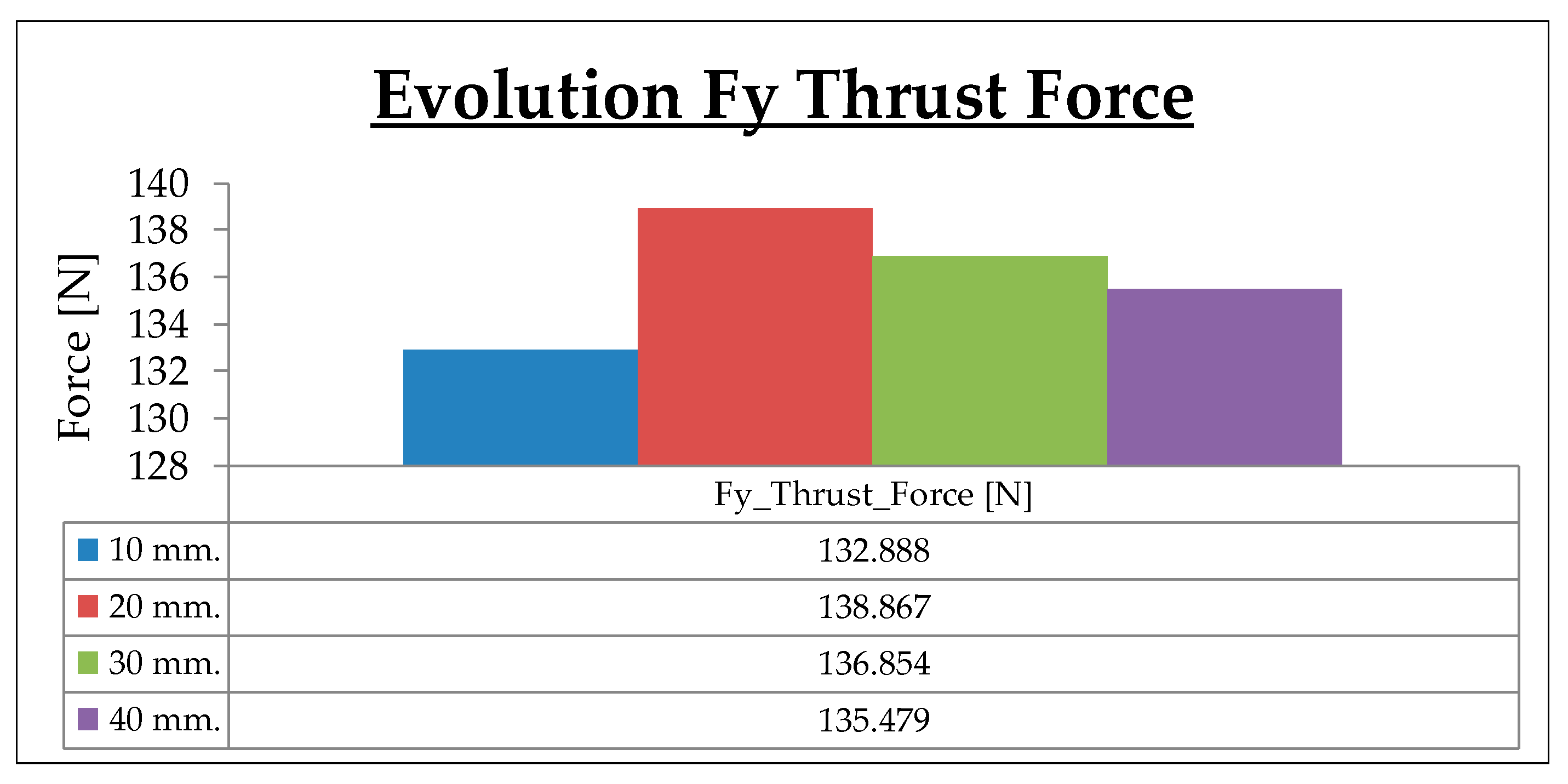
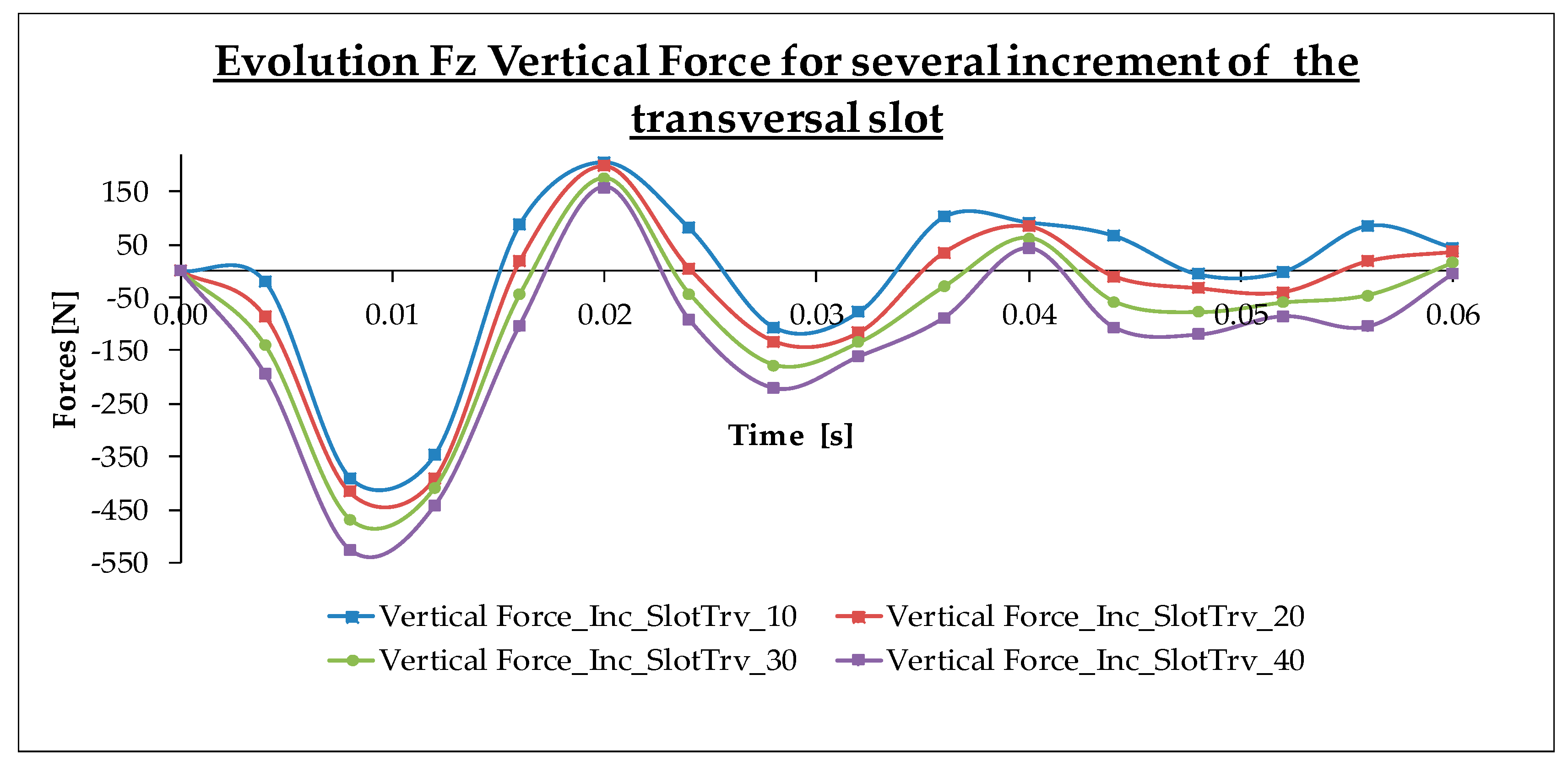
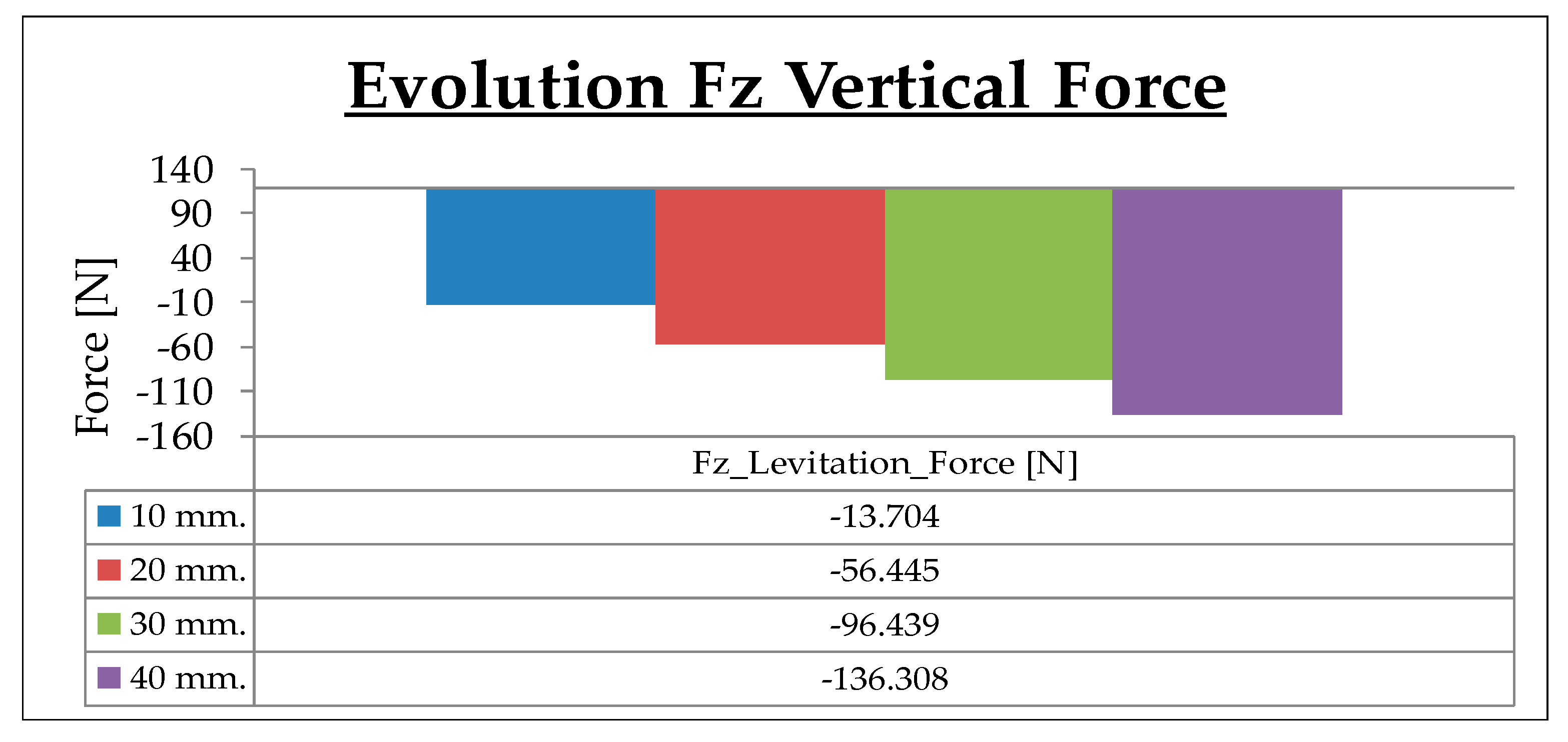
- Model 4, where the initial dimension of the width of the transversal slots in the primary part (35 mm) was incremented along the direction of the x-axis (see Figure 7) in order to reach a maximum thrust force. The width of the transversal slots was increased from 10 to 40 mm. This model incorporated all the changes proposed in the previous models. It was important to comment that the width of the lateral teeth was not going to be modified although the dimension of the transversal slots was increased along the x-axis. During this study to optimize the thrust force the width of the lateral teeth was fixed to 27 mm.
4. Model Simulations with FEM-3D
4.1. Definition of the Electrical External Circuit Coupling
- Step 1: To fix the magnetic field density in the airgap, Bg, using an analytical method to estimate its value [22].
- Step 2: To select the configuration of the electrical circuit coupling to supply the device (Y-connected or D-connected system) and to generate the traveling magnetic field defined in Section 2.2.
- Step 3: To use an iterative simulation process to calculate the parameters necessary to define the electrical circuit coupling. The first parameter is the value of the symmetrical line voltage, VLINE. The other parameters are the number of turns per phase and its resistance value: Nphase and Rphase. Both are necessary to have the coils defined correctly. The initial value of Rphase is fixed at around 2.6 Ω to start the iterative process.
4.2. Analysis of the Magnetic Field Density in the Airgap
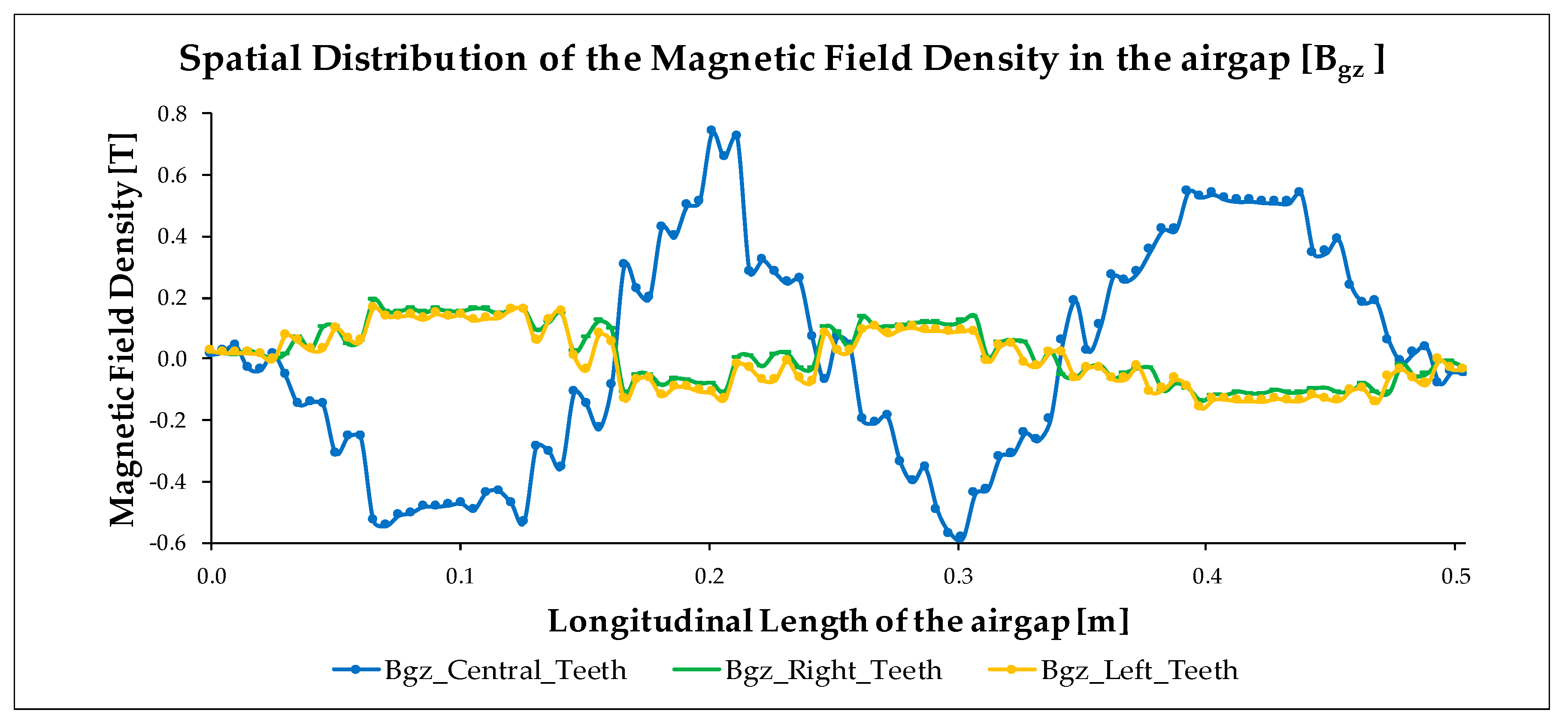
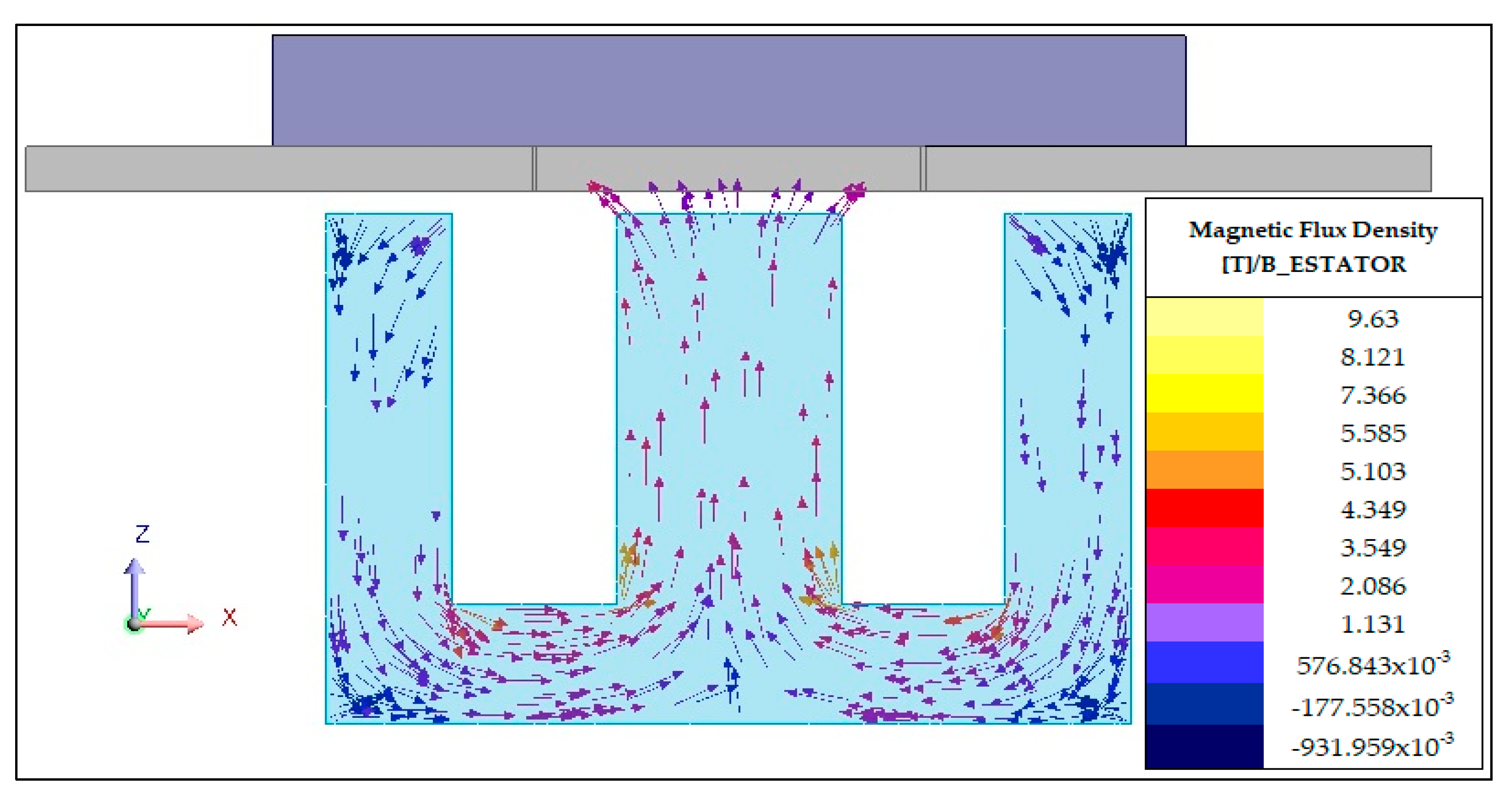
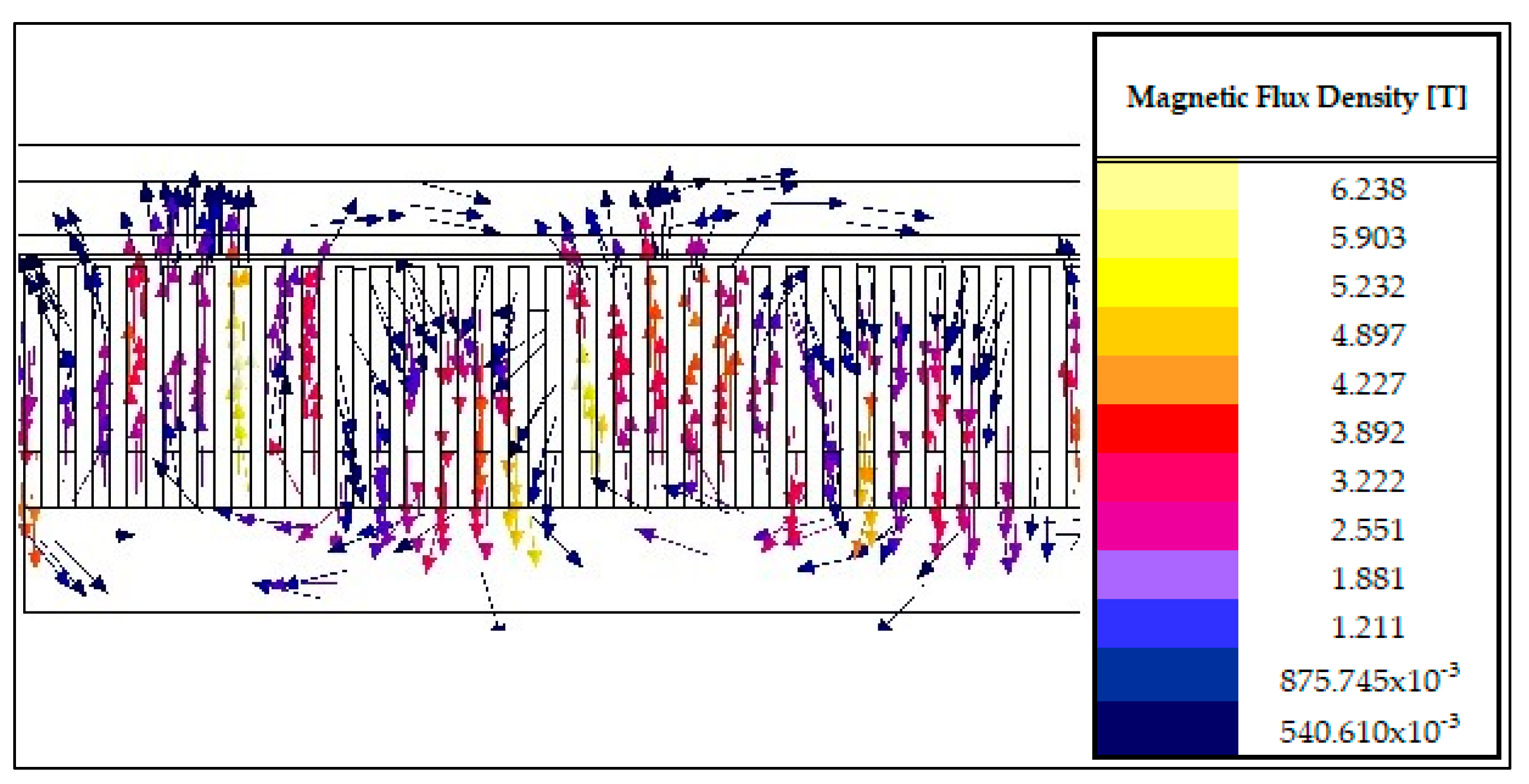
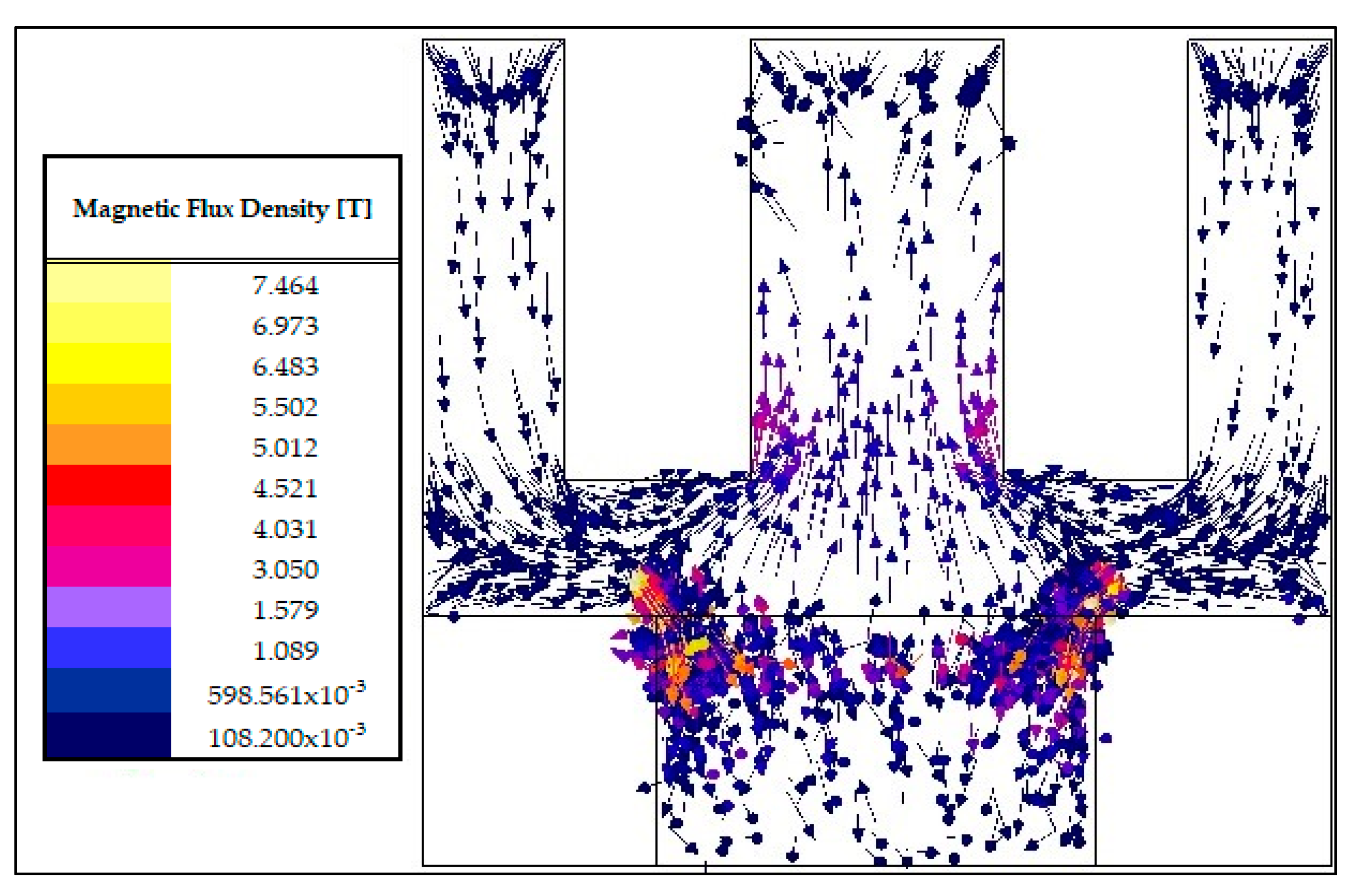
- Figure 9 and Figure 10 show that the useful magnetic flux only operated across the transverse sections and the longitudinal magnetic flux was canceled. Equation (15) shows this configuration of the transverse magnetic flux operating into the TFLIM.where is the magnetic flux that is involved in the electromechanical conversion (Wb); is the magnetic flux closed along transverse sections (Wb); is the magnetic flux that crosses the central teeth (Wb); is the magnetic flux that crosses the right-sided teeth (Wb), and is the magnetic flux that crosses the left-sided teeth (Wb).
- The high values reached for magnetic flux density in Figure 10 were obtained due to the linear behavior of the B-H curve that did not include the saturation effect inside the ferromagnetic regions. These values were unreachable inside real ferromagnetic steel, but the goal of this simulation was to demonstrate that the only existing magnetic flux was the transverse. To validate this simulation in an experimental test it is necessary to decrease the excitation in order to work near to the saturation zone from the B-H curve.
4.3. Simulation Results in Standstill Conditions
4.3.1. Simulation of the Original Model
4.3.2. Effect of Adding Two Slots of Dielectric into the Secondary Part
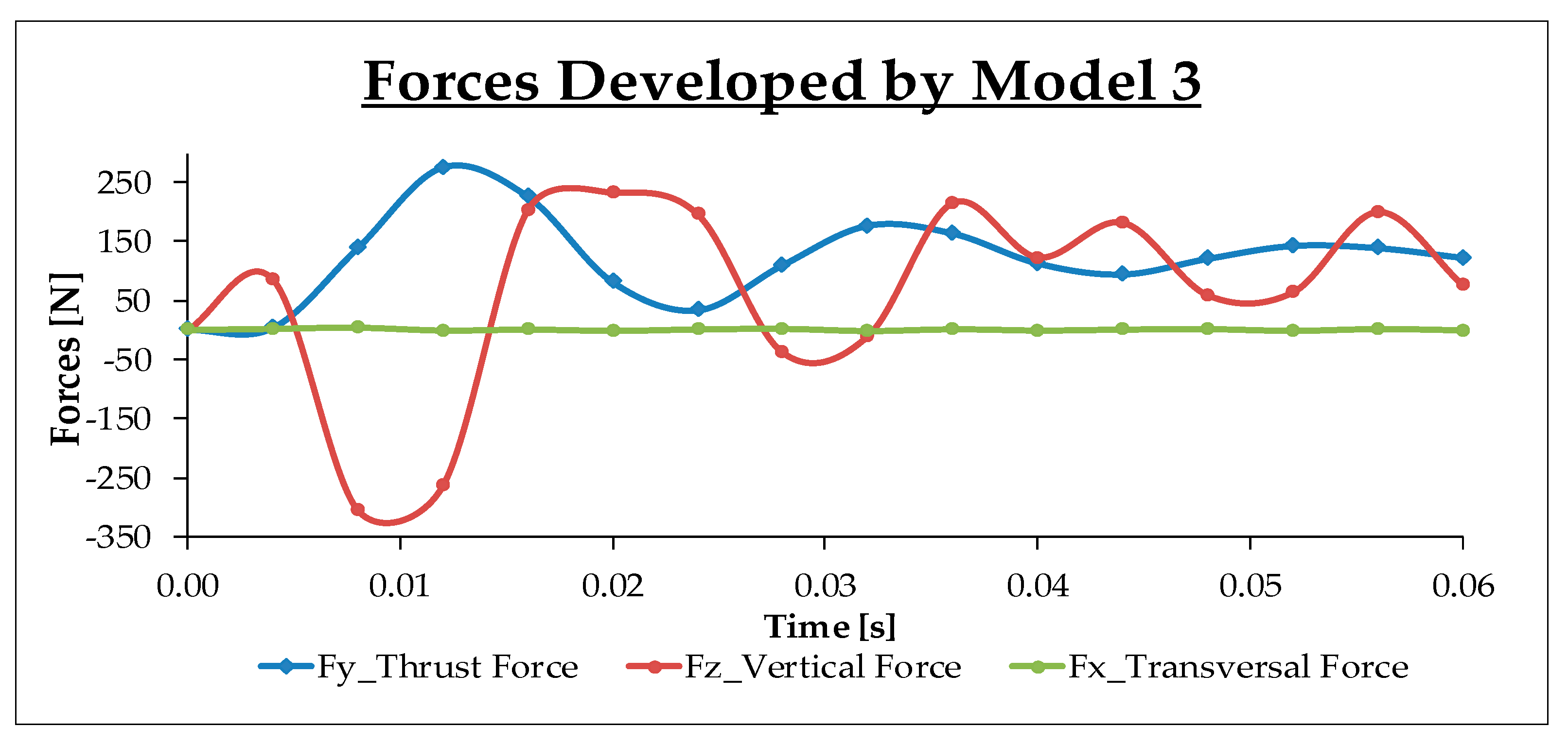
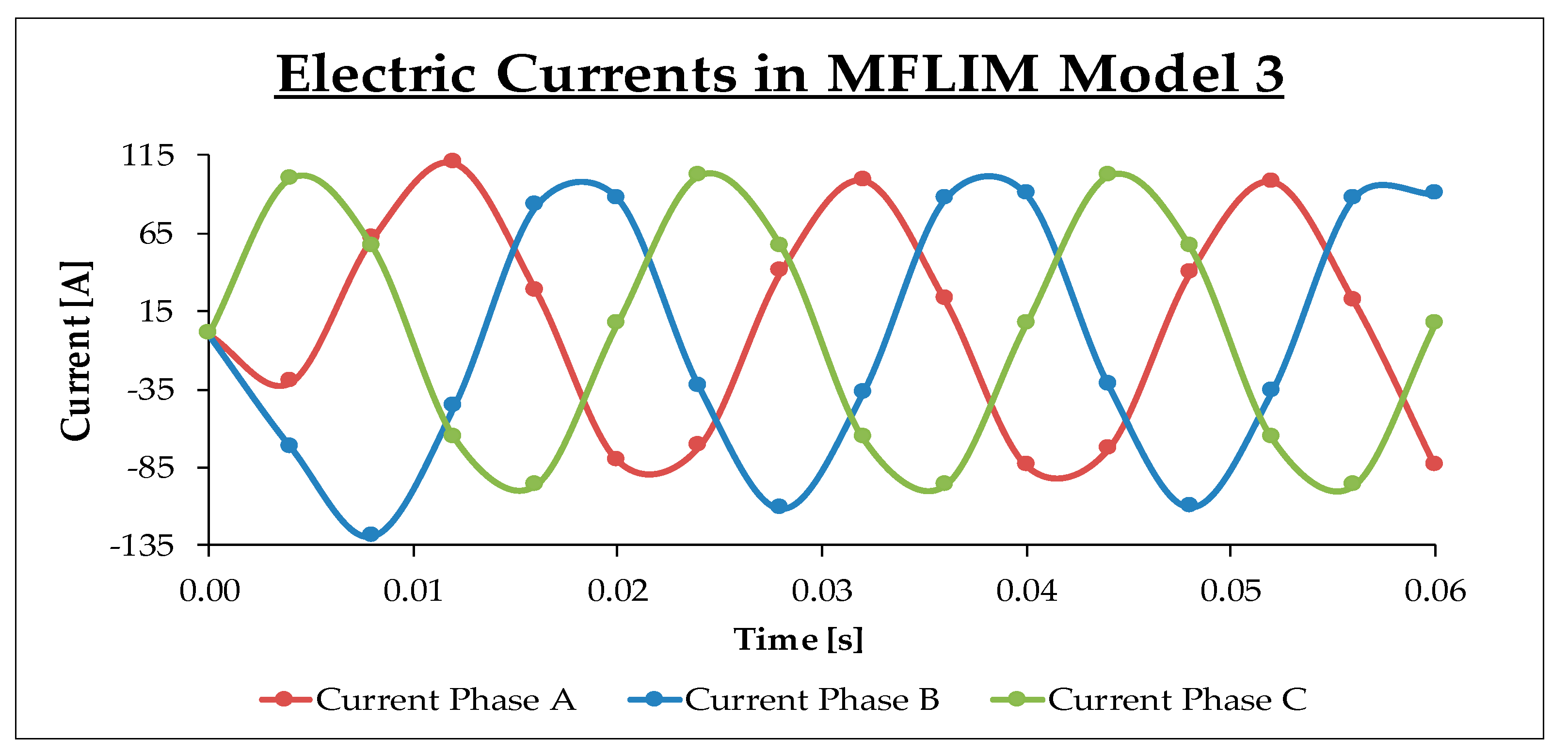
4.3.3. Effect of Adding a Ferromagnetic Yoke in the Primary Part
4.3.4. Effect of Varying the Width of the Transversal Slots
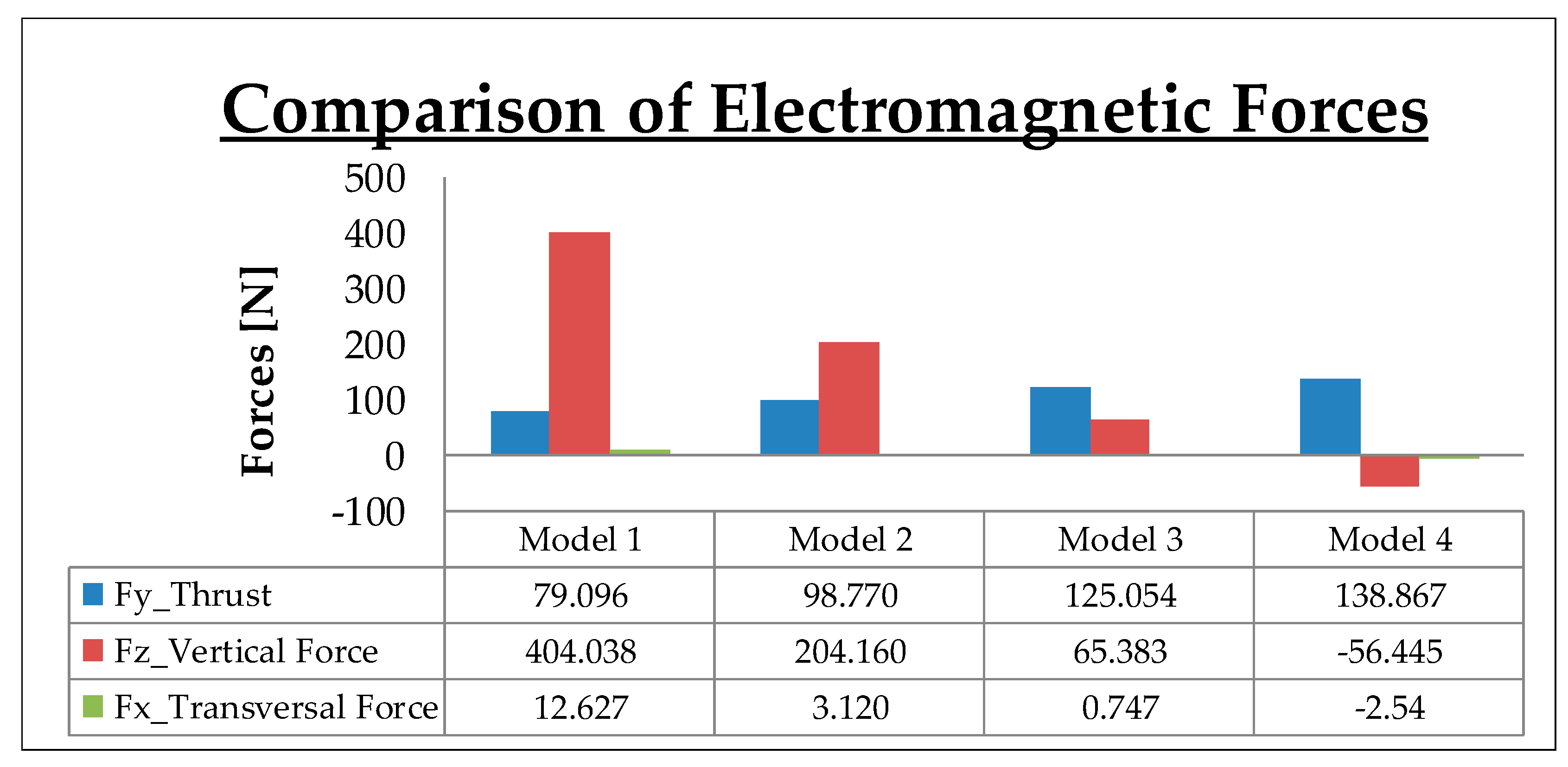
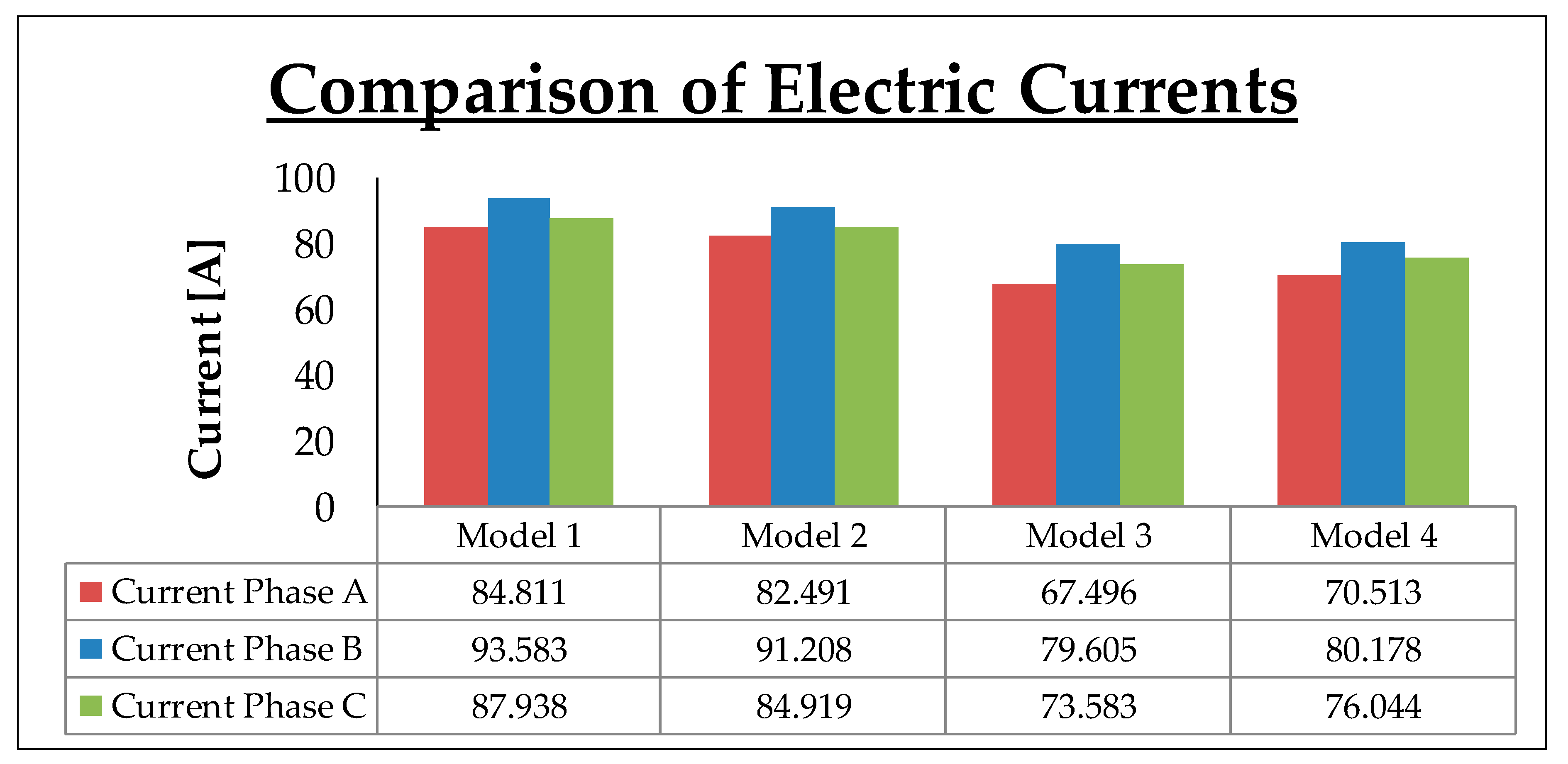
4.3.5. Comparative Study of the Main Results Obtained in Standstill Conditions
4.4. Simulation Results with Motion
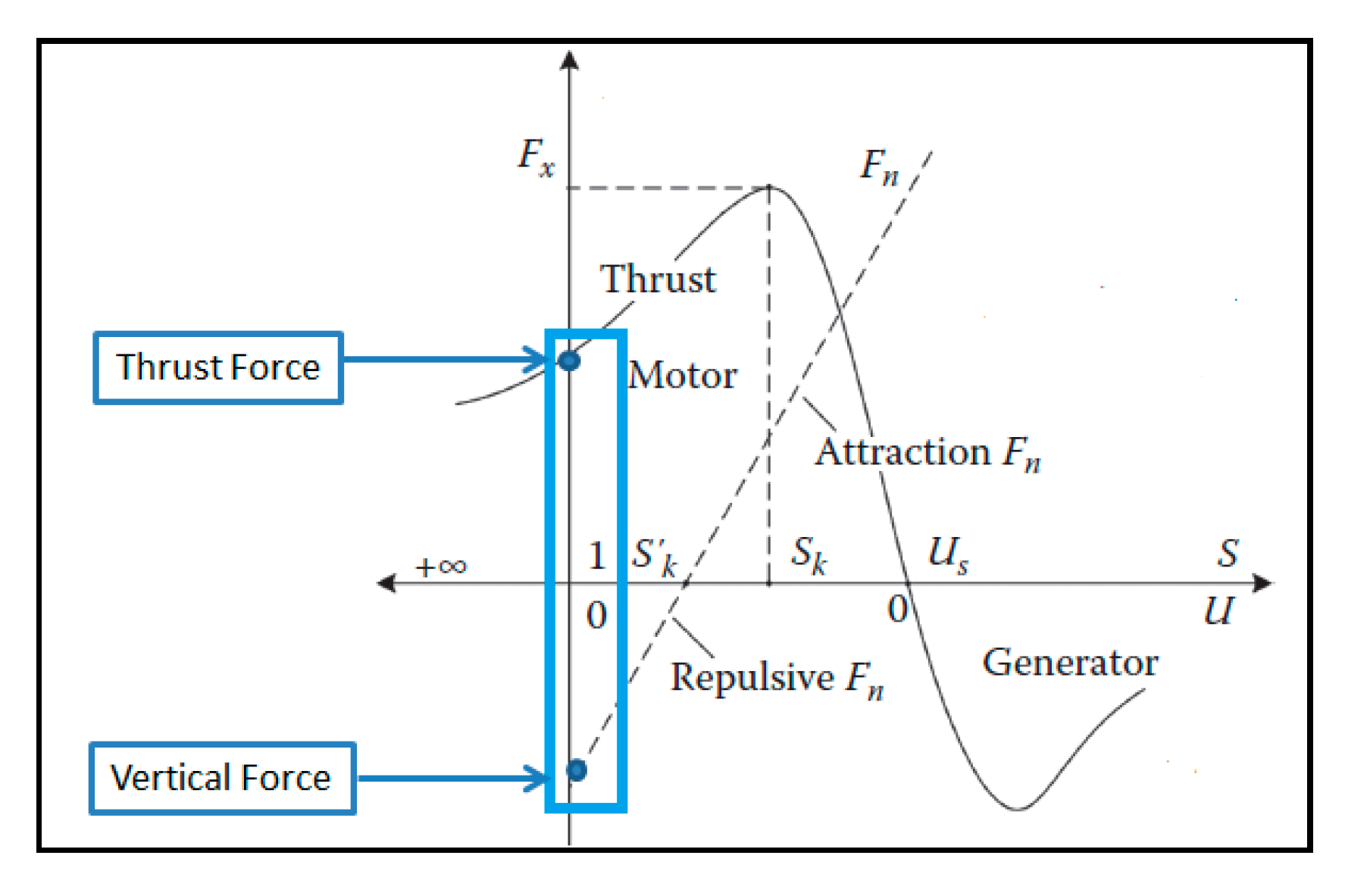
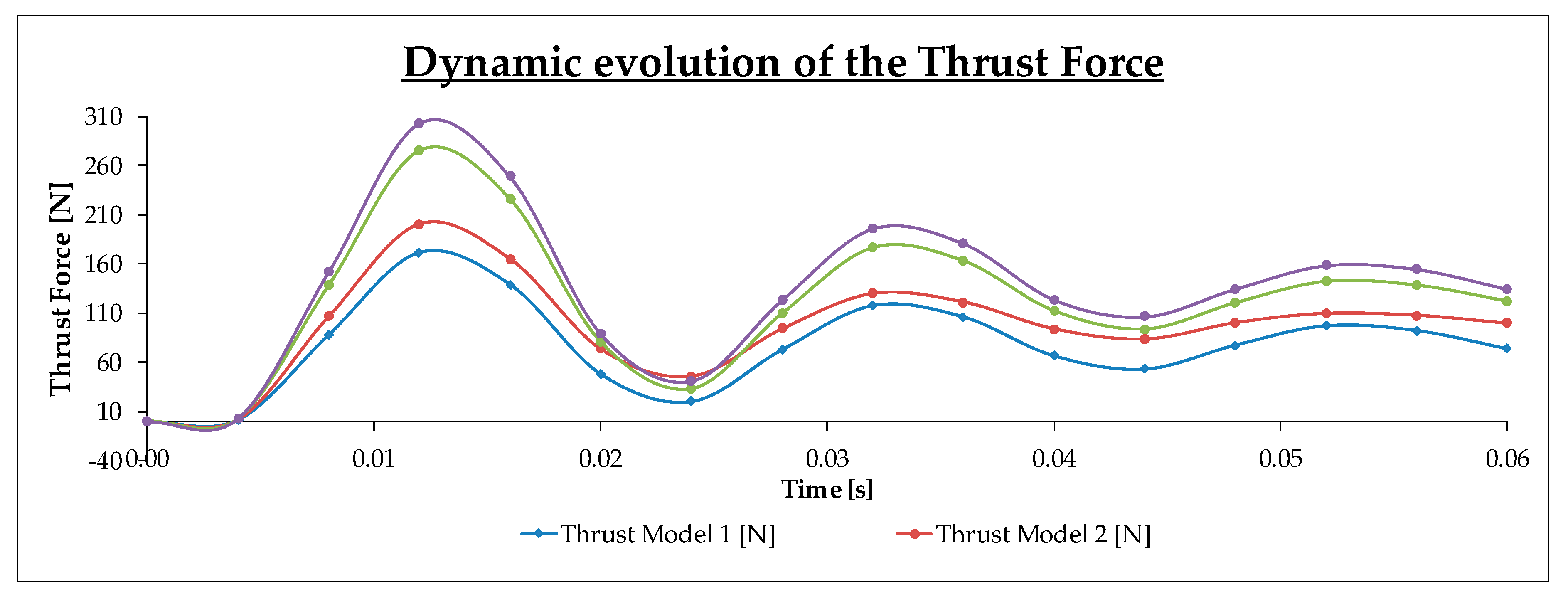
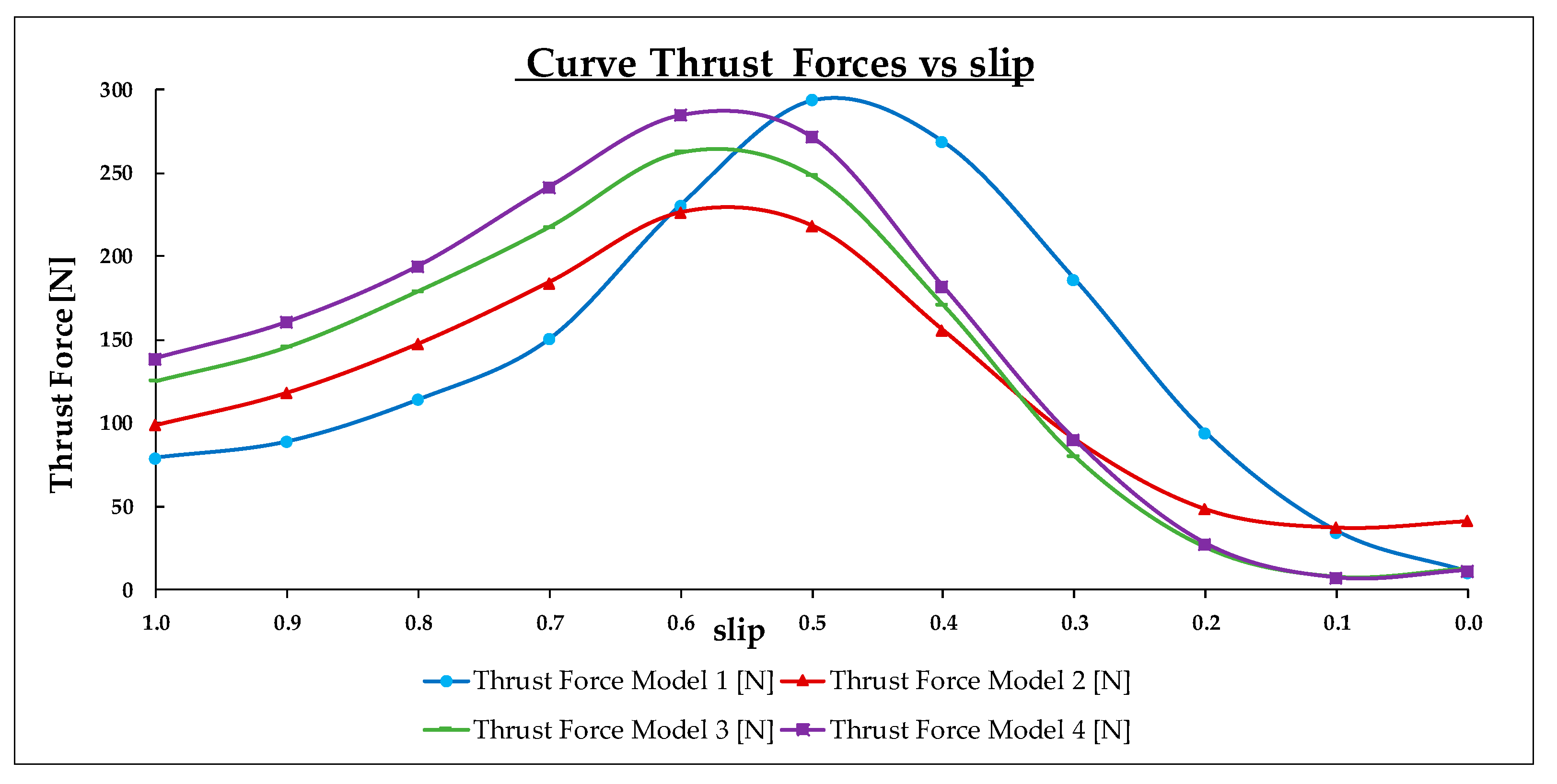
- Region I (low velocities zone): . With these velocities, the behavior of the thrust force had the same evolution as in standstill conditions, where this force obtained its highest value in model 4 (see Equation (20)).
- Region II (Medium velocities zone): .This region was characterized by a non-uniformity evolution of the thrust force. Model 2, model 3, and model 4 presented their inflection points between these velocities and after that continued with an evolution similar to region I (see Equation (21)).However, the thrust force developed in model 1 continued to increase from 8 to 10 m/s, where the thrust force was nearly 294 N (with a slip around 0.5). This value was the highest thrust force obtained in the present work.
- Region III (High velocities zone): .In this region, the evolution of the thrust force decreased in all models. In general, model 1 presented a higher thrust force than others. The behavior of these forces in model 2, model 3, and model 4 were very similar. The thrust forces decreased as the velocity of the secondary part reached the synchronous velocity (20 m/s and s = 0), when model 2 developed the highest thrust force (around 41 N) at slip equal to zero. This phenomenon appeared due to the end-effect and it was not present in asynchronous rotatory machines because the torque obtained at synchronous velocity was equal to zero.
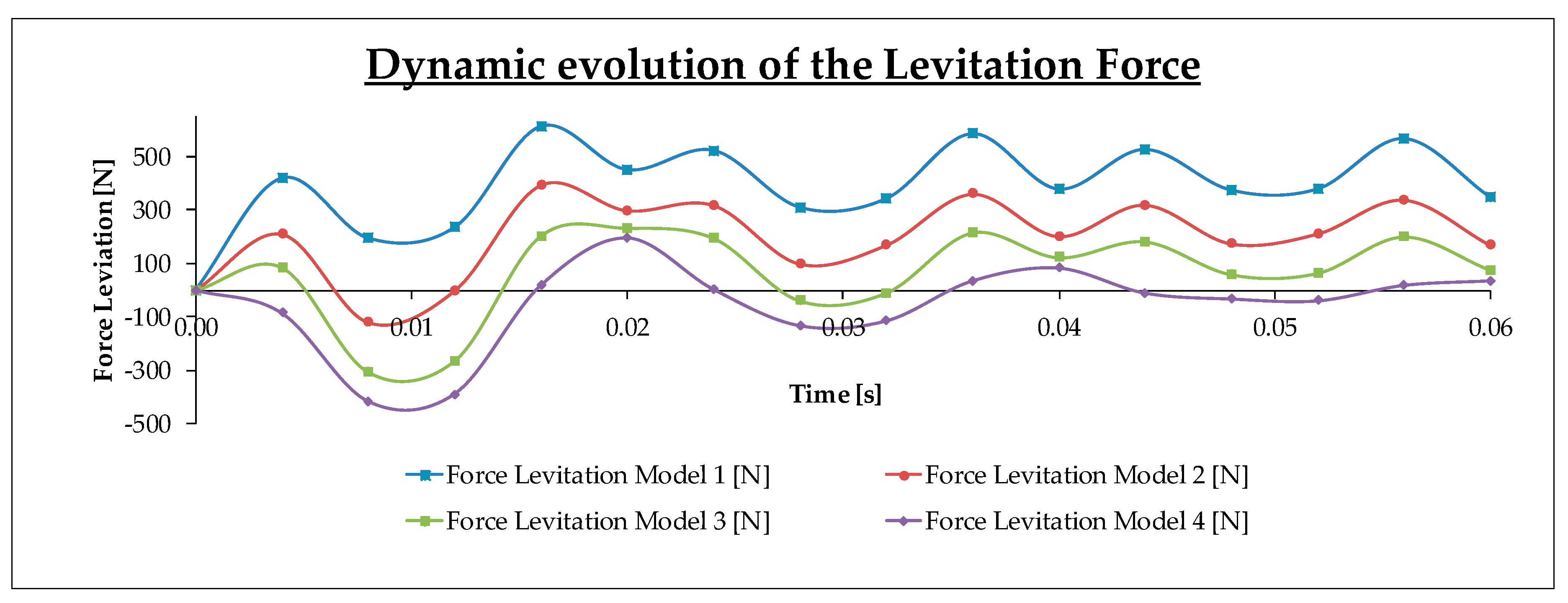
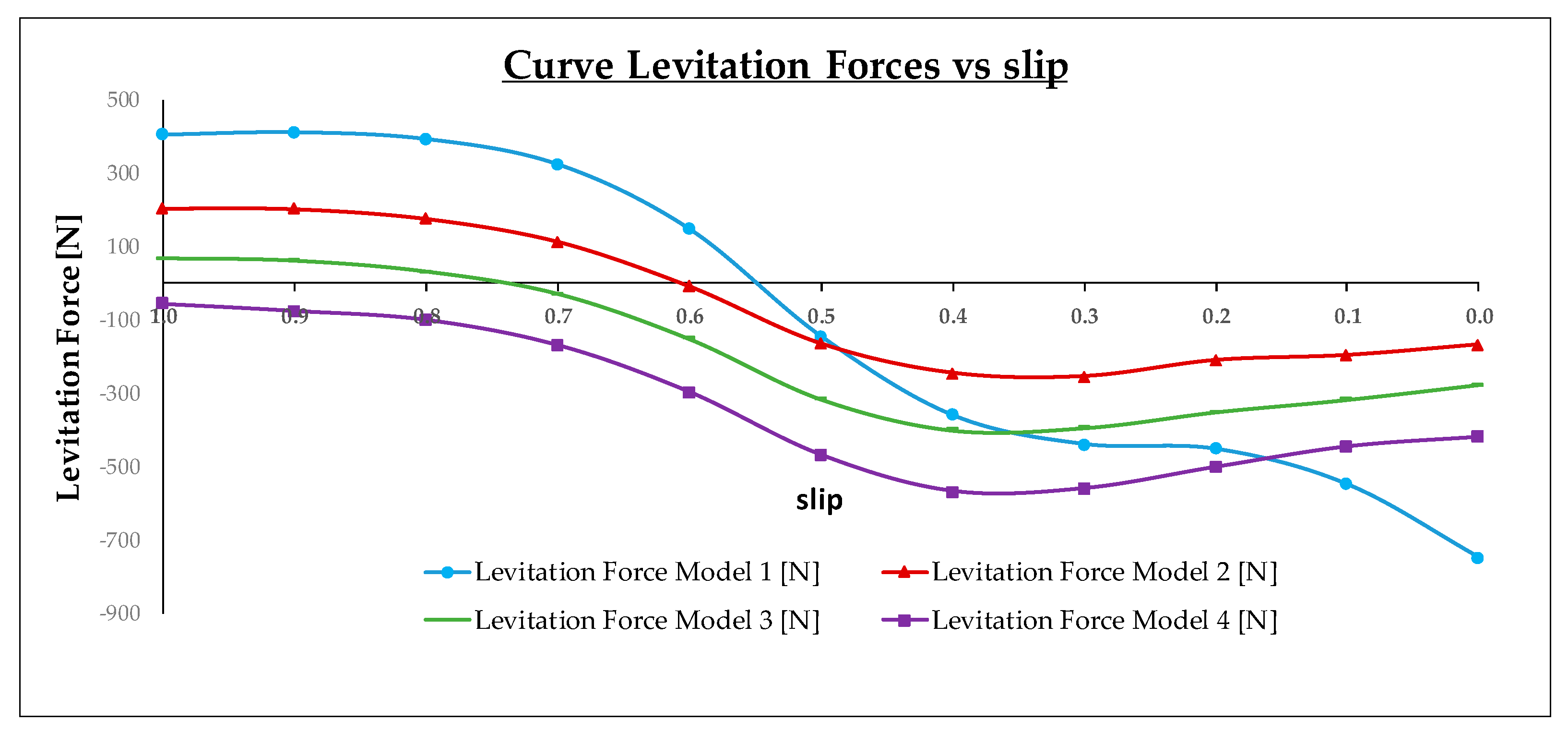
- Model 1, model 2, and model 3 presented two regions of work depending on the selected slip. The change-point between the levitation zone and the attraction zone varied in the function of the models. So, this change of zone occurred when the values of slips were 0.55 in model 1, 0.6 in model 2, and 0.72 in model 3. However, model 4 did not operate under levitation condition. For all slip values, model 4 developed an attraction force that reached the maximum value near to 568 N with a velocity equal to 12 m/s (slip equal to 0.4).
- Two regions are shown in Figure 31: Region I: . Inside this region, the behavior of the levitation force is given by Equation (22) and followed the same law as in the standstill conditions. Besides, at slip equal to one, model 1, model 2, and model 3 developed the maximum levitation force around 404.04, 204.16, and 65.38 N, respectively:It is important to remark the relevance of this force in the TFLIM. The highest values of levitation and attraction forces were obtained in model 1 (around 404.04 N for slip equal to one and −747.63 N, with velocities near to the synchronous velocity or slip equal to zero).Region II: . In this zone, model 2, model 3, and model 4 continued the evolution from region I (see Equation (23)). These forces did not continue decreasing with the slip as occurred with the levitation force from model 1, , that decreased with the slip.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nasar, S.N.; Boldea, I. Linear Motion Electric Machine; Wiley-Interscience Publication: Hoboken, NJ, USA, 1976; ISBN 0471630292. [Google Scholar]
- Han, H.S.; Kim, D.S. Magnetic Levitation. Maglev Technology and Applications; Springer: New York, NY, USA, 2016. [Google Scholar]
- Gieras, J.F. Linear Induction Drives; Clarendon Press: Oxford, UK; New York, NY, USA, 1994. [Google Scholar]
- Laithwaite, E.R. Induction Machines for Special Purposes; Chemical Publishing Company Inc.: New York, NY, USA, 1966; ISBN 978-0600411475. [Google Scholar]
- Luo, J.; Kou, B.; Zhou, Y.; Zhang, L. Analysis and design of an E-core transverse-flux flux-reversal linear motor. In Proceedings of the 19th International Conference on Electrical Machines and Systems (ICEMS), Chiba, Japan, 13–16 November 2016; pp. 1–5. [Google Scholar]
- Darabi, S.; Beromi, Y.A.; Izadfar, H.R. Comparison of two common configurations of LSRM: Transverse flux and longitudinal flux. In Proceedings of the International Conference and Exposition on Electrical and Power Engineering, Iasi, Romania, 25–27 October 2012; pp. 451–455. [Google Scholar] [CrossRef]
- Palomino, G.G.; Conde, J.R. Ripple reduction in a PMLSM with Concentrated Winding using 2-D finite elements simulation. In Proceedings of the 4th IET Conference on Power Electronics, Machines and Drives, York, UK, 2–4 April 2008; pp. 451–454. [Google Scholar] [CrossRef]
- Nozaki, Y.; Baba, J.; Shutoh, K.; Masada, E. Improvement of transverse flux linear induction motors performances with third order harmonics current injection. IEEE Trans. Appl. Supercond. 2004, 14, 1846–1849. [Google Scholar] [CrossRef]
- Cuong, N.V.; Koseki, T.; Isobe, E. Numerical analysis for the influence of the construction of the secondary reaction plate on the characteristics of linear induction motor. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 3012–3017. [Google Scholar] [CrossRef]
- Isfahani, A.H.; Ebrahimi, B.M.; Lesani, H. Design Optimization of a Low-Speed Single-Sided Linear Induction Motor for Improved Efficiency and Power Factor. IEEE Trans. Magn. 2008, 44, 266–272. [Google Scholar] [CrossRef]
- Park, S.C. Thrust and attraction force calculation of a linear induction motor with the moving cage-type secondary. In Proceedings of the Sixth International Conference on Electrical Machines and Systems, Beijing, China, 9–11 November 2003; Volume 1, pp. 226–229. [Google Scholar]
- Lee, B.; Koo, D.; Cho, Y. Investigation of Linear Induction Motor According to Secondary Conductor Structure. IEEE Trans. Magn. 2009, 45, 2839–2842. [Google Scholar] [CrossRef]
- Kwon, B.I.; Woo, K.I.; Kim, S.; Park, S.C. Analysis for dynamic characteristics of a single-sided linear induction motor having joints in the secondary conductor and back-iron. IEEE Trans. Magn. 2000, 36, 823–826. [Google Scholar] [CrossRef]
- Li, Z.; Yu, X.; Xue, Z.; Sun, H. Analysis of Magnetic Field and Torque Features of Improved Permanent Magnet Rotor Deflection Type Three-Degree-of-Freedom Motor. Energies 2020, 13, 2533. [Google Scholar] [CrossRef]
- Escarela-Perez, R.; Melgoza, E.; Alvarez-Ramirez, J.; Laureano-Cruces, A.L. Nonlinear time-harmonic finite-element analysis of coupled circuits and fields in low frequency electromagnetic devices. Finite Elem. Anal. Des. 2010, 46, 829–837. [Google Scholar] [CrossRef]
- Rivas, J.J.M. Estudio de la Interacción Magneto-Eléctrica en el Entrehierro de los Motores Lineales de Inducción de Flujo Transversal. Aplicación al Diseño de un Prototipo para Tracción Ferroviaria de tren Monoviga. Ph.D. Thesis, Universidad Politécnica de Madrid, Madrid, Spain, 2003. [Google Scholar]
- Boldea, I. Linear Electric Machines, Drives, and MAGLEV’s Handbook; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Boldea, I.; Nasar, S.A. The Induction Machine Handbook; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Turoswski, J.; Turoswski, M. Engineering Electrodynamics. Electric Machine, Transformer and Power Equipment Design; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Jezierski, E. Transformer. Theory; WNT: Warsaw, Poland, 1975. [Google Scholar]
- Gieras, J.F. Electrical Machines. Fundamentals of Electromechanical Energy Conversion; CRC Press, Taylor & Francis Group: Boca Raton, FL, USA, 2017. [Google Scholar]
- Lipo, T.A. Introduction to AC Machine Design; IEEE Press Series on Power Engineering; Wiley: Hoboken, NJ, USA, 2017. [Google Scholar]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometric Parameters of the LIM (mm) | |||||
|---|---|---|---|---|---|
| Thickness Al. | Thickness Fe. | Width Al. | Width Fe. | Length Al. | Length Fe. |
| 10 | 25 | 300 | 195 | 990 | 970 |
| Mechanic Airgap: g | 5 | ||||
| Width Longitudinal Slot | 8.5 | ||||
| Slot Pitch | 16.5 | ||||
| Length Fixed Part | 503.5 | ||||
| Electrical and Magnetic Properties of the Materials Esed in FEM-3D | |
|---|---|
| Aluminum | |
| Conductivity (Sm–1) | 3.73 × 107 |
| Relative Permeability | 1 |
| Steel | |
| Conductivity (Sm–1) | 0 |
| Relative Permeability | 2500 |
| Copper | |
| Resistivity (Ωmm2/m) | 2.37 × 10–2 |
| Relative Permeability | 1 |
| Final Width of the Transversal Slots (mm) | Fy_Thrust Force (N) | Fz_Levitation Force (N) |
|---|---|---|
| 45 mm (Increment of 10 mm) | 132.888 | −13.704 |
| 55 mm (Increment of 20 mm) | 138.867 | −56.445 |
| 65 mm (Increment of 30 mm) | 136.854 | −96.439 |
| 75 mm (Increment of 40 mm) | 135.479 | −136.308 |
| Model 3 (Reference Values) | 125.054 | 65.383 |
| Dynamic Conditions for the Motion Analysis | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Slip | 0 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 |
| Velocity (m/s) | 20 | 18 | 16 | 14 | 12 | 10 | 8 | 6 | 4 | 2 | 0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hernández, J.A.D.; Carralero, N.D.; Vázquez, E.G. A 3-D Simulation of a Single-Sided Linear Induction Motor with Transverse and Longitudinal Magnetic Flux. Appl. Sci. 2020, 10, 7004. https://doi.org/10.3390/app10197004
Hernández JAD, Carralero ND, Vázquez EG. A 3-D Simulation of a Single-Sided Linear Induction Motor with Transverse and Longitudinal Magnetic Flux. Applied Sciences. 2020; 10(19):7004. https://doi.org/10.3390/app10197004
Chicago/Turabian StyleHernández, Juan Antonio Domínguez, Natividad Duro Carralero, and Elena Gaudioso Vázquez. 2020. "A 3-D Simulation of a Single-Sided Linear Induction Motor with Transverse and Longitudinal Magnetic Flux" Applied Sciences 10, no. 19: 7004. https://doi.org/10.3390/app10197004
APA StyleHernández, J. A. D., Carralero, N. D., & Vázquez, E. G. (2020). A 3-D Simulation of a Single-Sided Linear Induction Motor with Transverse and Longitudinal Magnetic Flux. Applied Sciences, 10(19), 7004. https://doi.org/10.3390/app10197004