Coupling Control Strategy and Experiments for Motion Mode Switching of a Novel Electric Chassis


Abstract
:1. Introduction
2. Problem Formulation and System Modeling
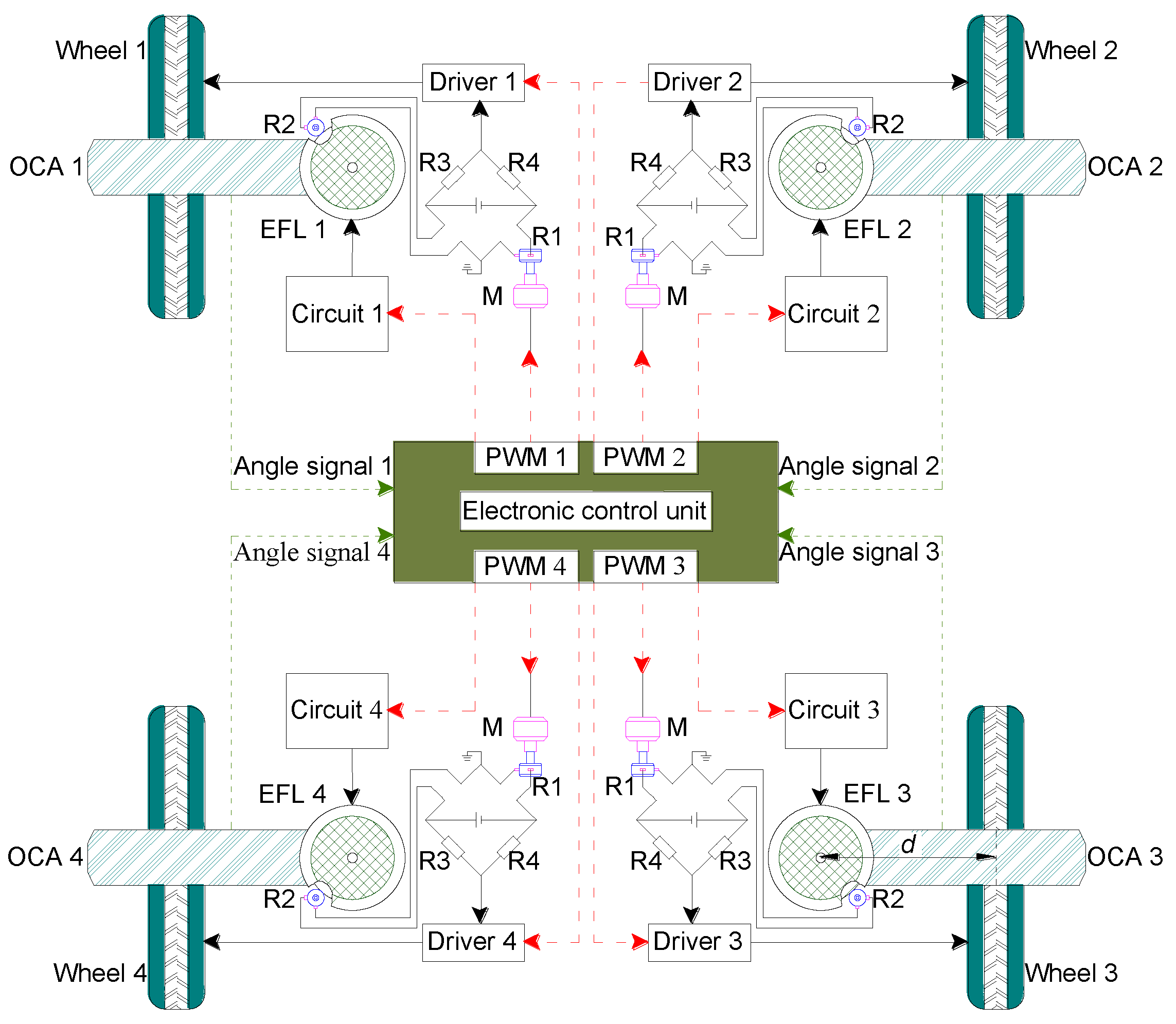
2.1. Overall Structure
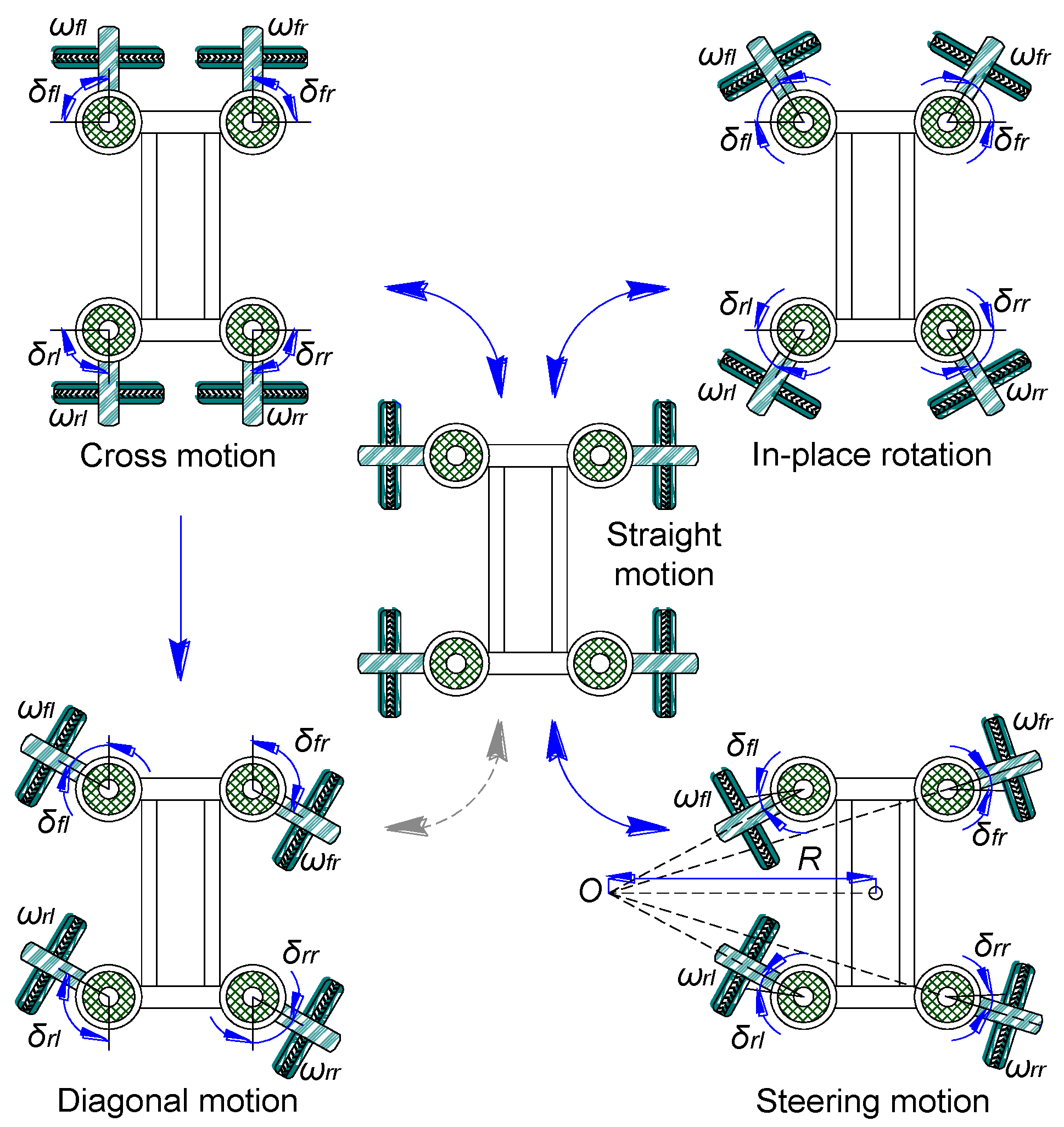
2.2. Motion Models for Various Motion Modes
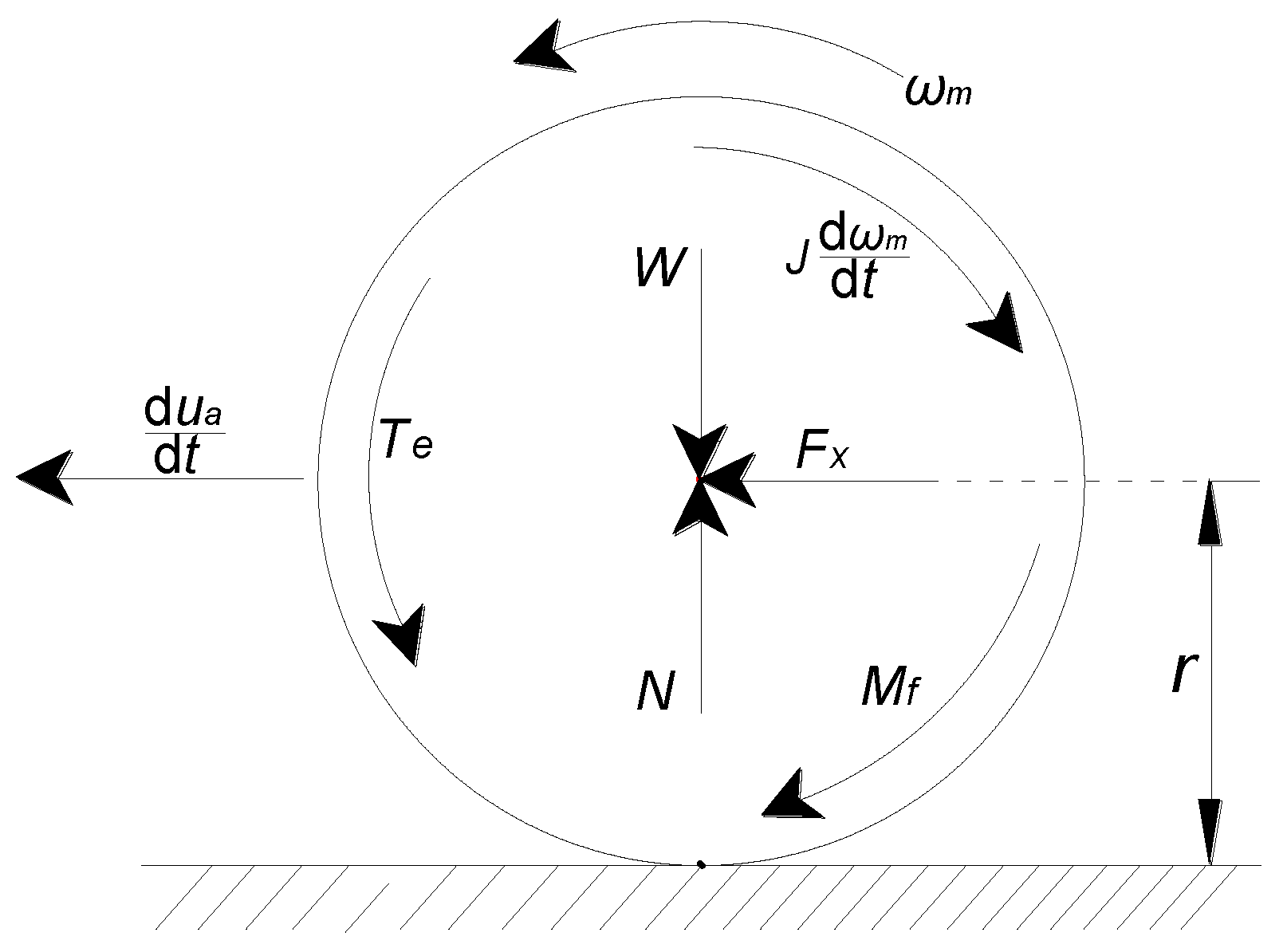
2.3. Model of Electric Wheel
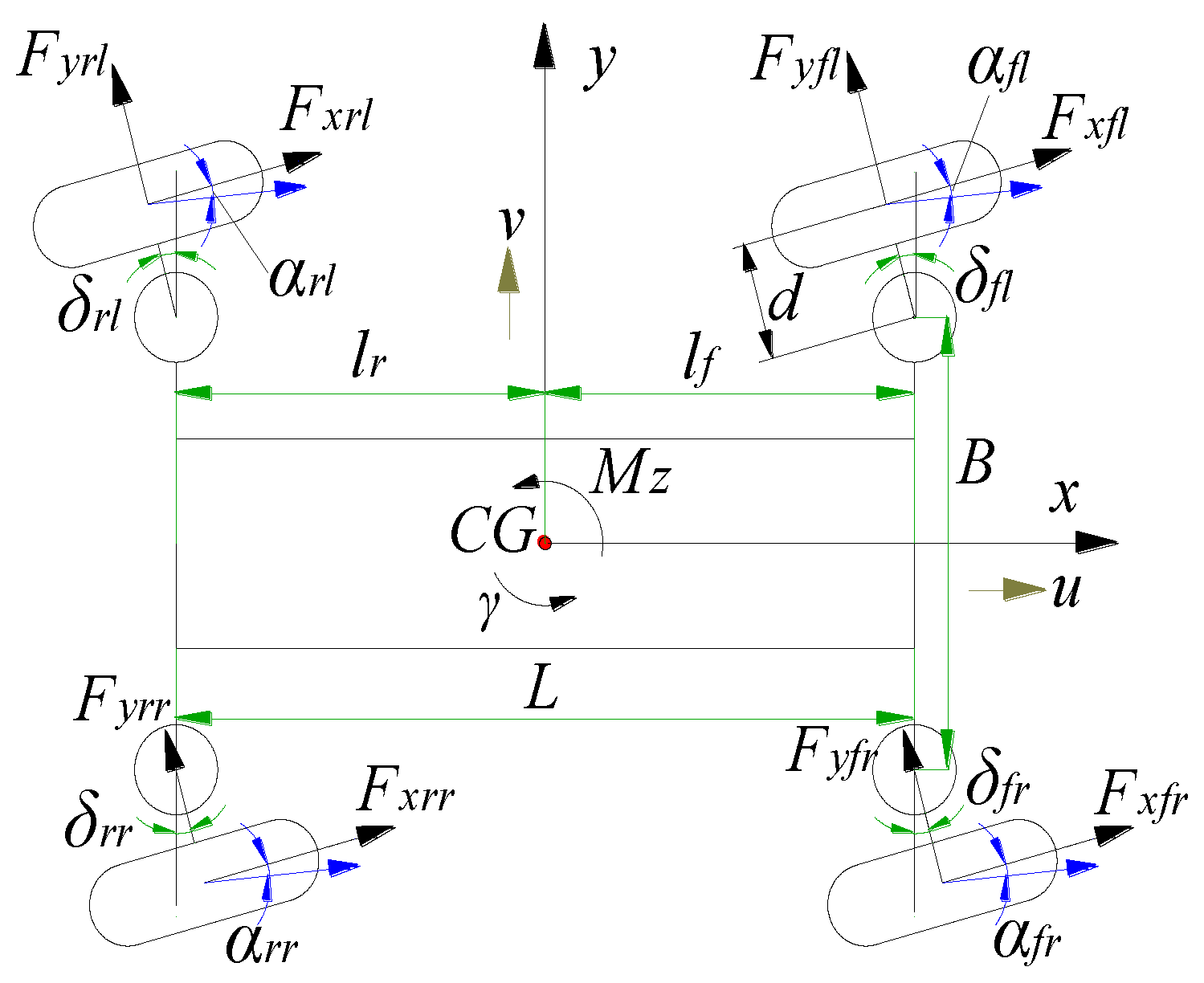
2.4. General Flexible Chassis Kinetic Model
3. Control Strategy
3.1. Coupling Error Control Model
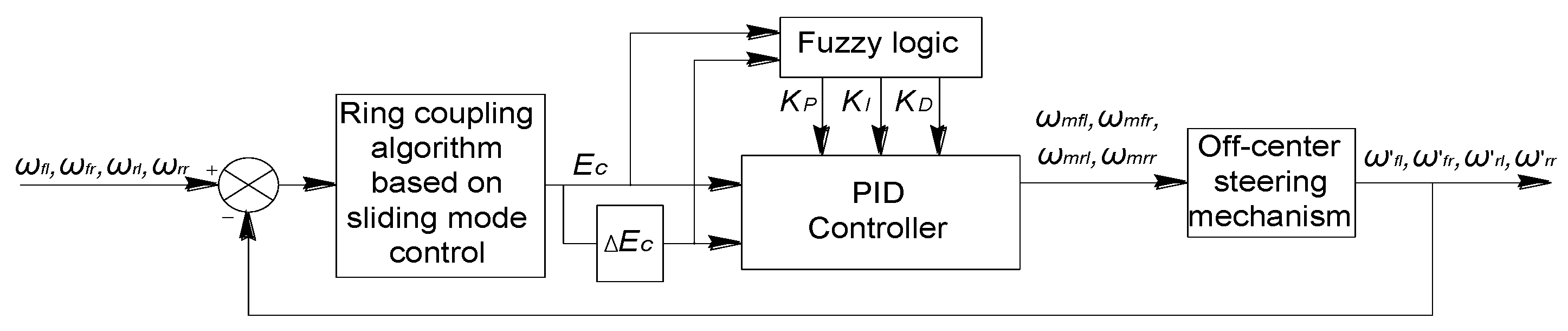
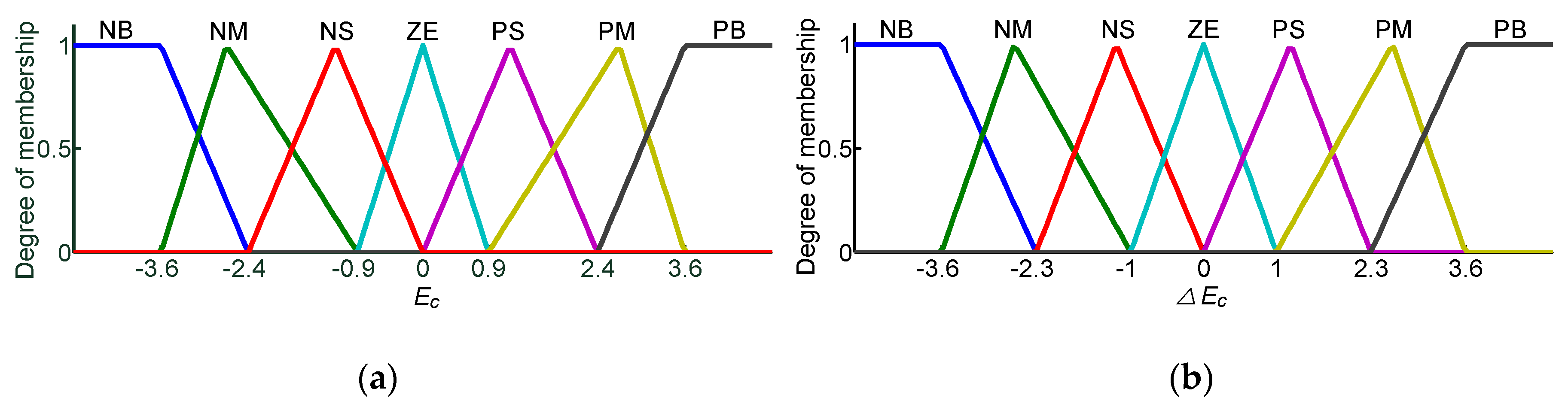
3.2. Fuzzy PID Coupling Error Control Strategy
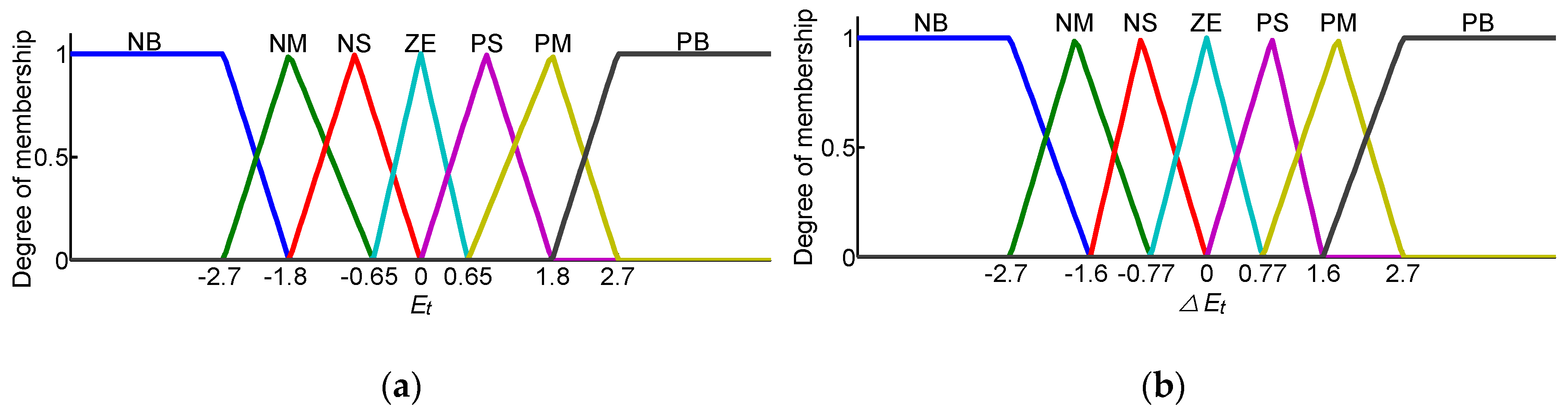
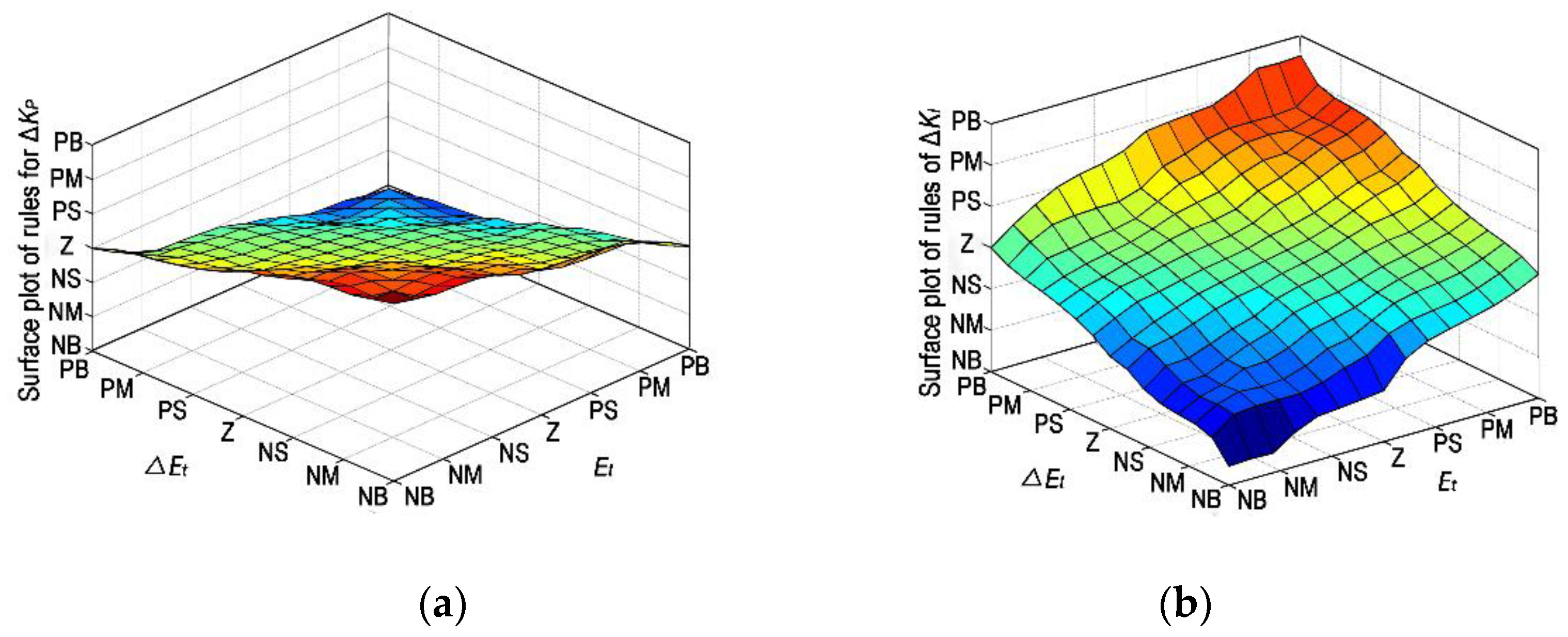
3.3. Off-Center Arm Steering Angle Tracking Error Control Strategy
4. Simulation and Analysis
4.1. Simulation Parameters
4.2. Simulation Results
5. Experimental Verification
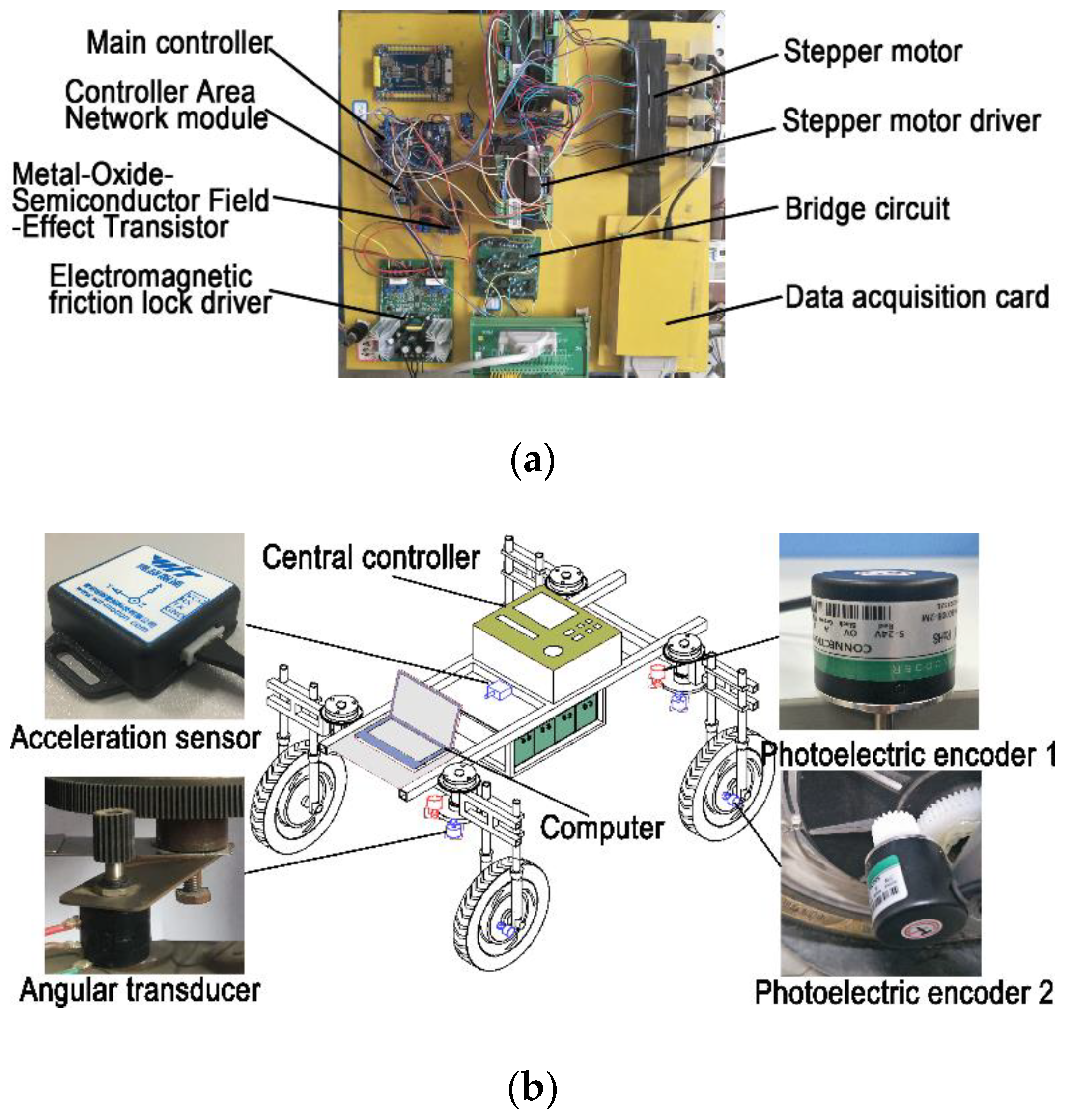
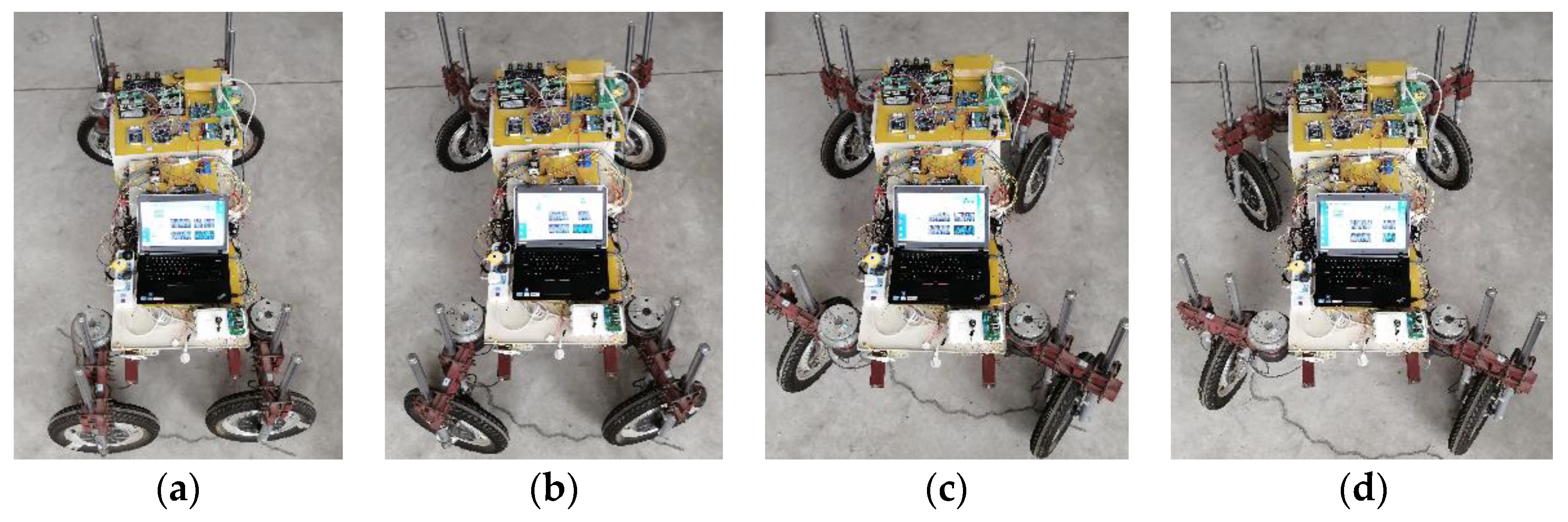
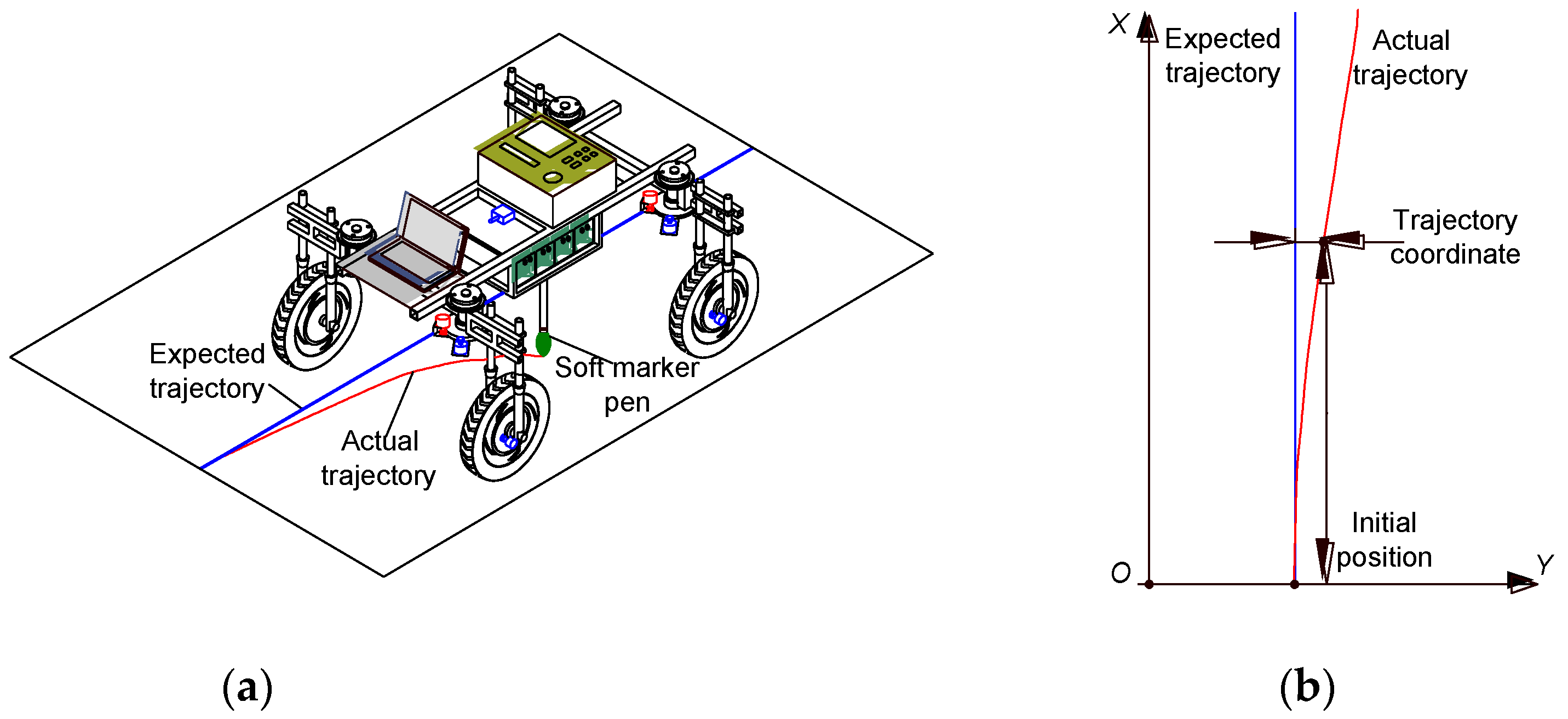
5.1. Experiment Equipment and Method
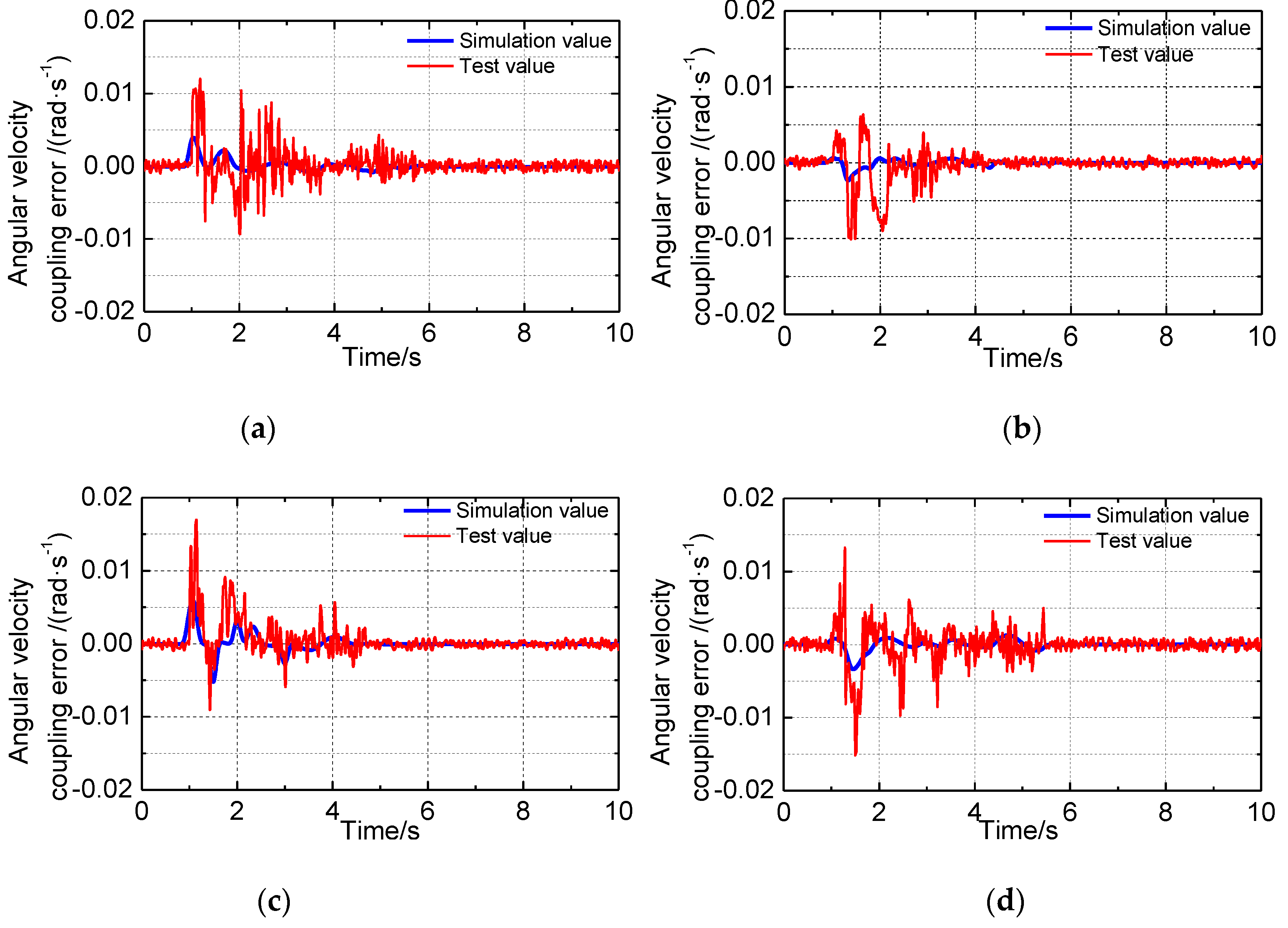
5.2. Analysis of Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| MZ | yaw moment |
| α | side-slip angle |
| B | left and right off-center shafts distance |
| Bm | viscous friction damping coefficient |
| Cα | tire cornering stiffness |
| d | off-center distance |
| δi | steering angle of off-center arm |
| δio | target angles of the off-center arm |
| Ep | coupling error |
| ep | steering angle tracking error |
| η | proportionality constant |
| Fxi | longitudinal tire force |
| Fyi | tire side force |
| γ | yaw rate of flexible chassis |
| I | moment of inertia of flexible chassis |
| J | moment of inertia of electric wheel |
| Jo | moment of inertia of off-center steering mechanism |
| K | constant coefficient |
| L | front and rear off-center shafts distance |
| lf | distance from front axle to chassis centroid |
| lr | distance from rear axle to chassis centroid |
| λ | coupling error coefficient |
| Mf | rolling resistance moment |
| m | mass of flexible chassis |
| μ | coupling error control function |
| N | supporting force |
| r | electric wheel radius |
| R | steering motion turning radius |
| Te | electromagnetic torque of electric motor |
| Ts | load torque of electric motor |
| εp | synchronization error |
| u | longitudinal speed of flexible chassis |
| v | lateral speed of flexible chassis |
| ωd | demand angular velocity of off-center arm |
| ωm | electric wheel angular velocity |
| ωi | angular velocity of off-center arm |
| W | total weight of electric wheel and its load |
Abbreviations
| FC | flexible chassis |
| OSM | off-center steering mechanisms |
| CM | cross motion |
| IR | in-place rotation |
| DM | diagonal motion |
| SM | steering motion |
| CE | coupling error |
| MMS | motion mode switching |
| EV | electric vehicle |
References
- Lang, J.; Tian, J.; Zhou, Y.; Li, K.; Chen, D.; Huang, Q.; Xing, X.; Zhang, Y.; Chen, S. A high temporal-spatial resolution air pollutant emission inventory for agricultural machinery in China. J. Clean. Prod. 2018, 183, 1110–1120. [Google Scholar] [CrossRef]
- Ko, M.H.; Ryuh, B.S.; Kim, K.C.; Suprem, A.; Mahalik, N.P. Autonomous greenhouse mobile robot driving strategies from system integration perspective: Review and application. IEEE/ASME Trans. Mechatron. 2015, 20, 1705–1716. [Google Scholar] [CrossRef]
- Lovarelli, D.; Bacenetti, J. Exhaust gases emissions from agricultural tractors: State of the art and future perspectives for machinery operators. Biosyst. Eng. 2019, 186, 204–213. [Google Scholar] [CrossRef]
- Gonzalez-De-Soto, M.; Emmi, L.; Benavides, C.; Garcia, I.; Gonzalez-de-Santos, P. Reducing air pollution with hybrid-powered robotic tractors for precision agriculture. Biosyst. Eng. 2016, 143, 79–94. [Google Scholar] [CrossRef]
- Bechar, A.; Vigneault, C. Agricultural robots for field operations: Concepts and components. Biosyst. Eng. 2016, 149, 94–111. [Google Scholar] [CrossRef]
- Chang, C.; Song, G.; Lin, K.M. Two-stage guidance control scheme for high-precision straight-line navigation of a four-wheeled planting robot in a greenhouse. Trans. ASABE 2016, 59, 1193–1204. [Google Scholar] [CrossRef]
- Reina, G.; Milella, A.; Rouveure, R.; Nielsen, M.; Worst, R.; Blas, M.R. Ambient awareness for agricultural robotic vehicles. Biosyst. Eng. 2016, 146, 114–132. [Google Scholar] [CrossRef]
- Chen, B.; Kuo, C. Electronic stability control for electric vehicle with four in-wheel motors. Int. J. Autom. Technol. 2014, 15, 573–580. [Google Scholar] [CrossRef]
- Nam, K.; Fujimoto, H.; Hori, Y. Lateral stability control of in-wheel-motor-driven electric vehicles based on sideslip angle estimation using lateral tire force sensors. IEEE Trans. Veh. Technol. 2012, 61, 1972–1985. [Google Scholar] [CrossRef]
- Ghobadpour, A.; Boulon, L.; Mousazadeh, H.; Malvajerdi, A.S.; Rafiee, S. State of the art of autonomous agricultural off-road vehicles driven by renewable energy systems. Energy Procedia 2019, 162, 4–13. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, Y.; Zhang, L.; Liu, M. Vehicle stability enhancement through hierarchical control for a four-wheel-independently-actuated electric vehicle. Energies 2017, 10, 947. [Google Scholar] [CrossRef] [Green Version]
- Zhai, L.; Hou, R.; Sun, T.; Kavuma, S. Continuous steering stability control based on an energy-saving torque distribution algorithm for a four in-wheel-motor independent-drive electric vehicle. Energies 2018, 11, 350. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Gao, B.; Ren, B.; Chen, H. Integrated control of in-wheel motor electric vehicles using a triple-step nonlinear method. J. Frankl. Inst. 2015, 352, 519–540. [Google Scholar] [CrossRef]
- Gat, G.; Gan-Mor, S.; Degani, A. Stable and robust vehicle steering control using an overhead guide in greenhouse tasks. Comput. Electron. Agric. 2016, 121, 234–244. [Google Scholar] [CrossRef]
- Tu, X.; Gai, J.; Tang, L. Robust navigation control of a 4WD/4WS agricultural robotic vehicle. Comput. Electron. Agric. 2019, 164, 1–9. [Google Scholar] [CrossRef]
- Kannan, P.; Natarajan, S.K.; Dash, S.S. Design and implementation of fuzzy logic controller for online computer controlled steering system for navigation of a teleoperated agricultural vehicle. Math. Probl. Eng. 2013, 2013, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Ma, K.; Qi, T.Z. A human centred design of general purpose unmanned electric vehicle chassis for agriculture task payload. J. Comput. Inf. Sci. Eng. 2017, 17, 031004. [Google Scholar] [CrossRef]
- Qiu, Q.; Fan, Z.; Meng, Z.; Zhang, Q.; Cong, Y.; Li, B.; Wang, N.; Zhao, C. Extended Ackerman Steering Principle for the coordinated movement control of a four wheel drive agricultural mobile robot. Comput. Electron. Agric. 2018, 152, 40–50. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, B.; Fan, J.; Hu, X.; Wei, S.; Li, Y.; Zhou, Q.; Wei, C. Development of a tomato harvesting robot used in greenhouse. Int. J. Agric. Biol. Eng. 2017, 10, 140–149. [Google Scholar] [CrossRef]
- Grimstad, L.; From, P.J. Thorvald II—A modular and re-configurable agricultural robot. IFAC Pap. OnLine 2017, 50, 4588–4593. [Google Scholar] [CrossRef]
- Chen, T.; Xu, X.; Li, Y.; Wang, W.; Chen, L. Speed-dependent coordinated control of differential and assisted steering for in-wheel motor driven electric vehicles. J. Autom. Eng. 2017, 14, 1–15. [Google Scholar] [CrossRef]
- Zhang, H.; Zhao, W. Decoupling control of steering and driving system for in-wheel-motor-drive electric vehicle. Mech. Syst. Signal Proc. 2018, 101, 389–404. [Google Scholar] [CrossRef]
- Oftadeh, R. Mechatronic design of a four wheel steering mobile robot with fault-tolerant odometry feedback. Mech. Syst. 2013, 13, 663–669. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, W.; Luan, Z.; Gao, Q.; Deng, K. Decoupling control of vehicle chassis system based on neural network inverse system. Mech. Syst. Signal Proc. 2018, 106, 176–197. [Google Scholar] [CrossRef]
- Park, J.; Jeong, H.; Jang, I.G.; Hwang, S.H. Torque distribution algorithm for an independently driven electric vehicle using a fuzzy control method. Energies 2015, 8, 8537–8561. [Google Scholar] [CrossRef]
- Barbosa, R.S.; Machado, J.A.T.; Galhano, A.M. Performance of fractional PID algorithms controlling nonlinear systems with saturation and backlash phenomena. J. Vib. Control. 2007, 13, 1407–1418. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, A.T.; Márquez, R.; Dequidt, A. An augmented system approach for LMI-based control design of constrained Takagi-Sugeno fuzzy systems. Eng. Appl. Artif. Intell. 2017, 61, 96–102. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Sentouh, C.; Popieul, J.C. Fuzzy steering control for autonomous vehicles under actuator saturation: Design and experiments. J. Frankl. Inst. 355. 2018, 18, 9374–9395. [Google Scholar] [CrossRef]
- Perng, J.W.; Lai, Y.H. Robust longitudinal speed control of hybrid electric vehicles with a two-degree- of-freedom fuzzy logic controller. Energies 2016, 9, 290. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Fu, M.; Ma, H.; Yang, Y. Lateral control of autonomous vehicles based on fuzzy logic. Control Eng. Pract. 2015, 34, 1–17. [Google Scholar] [CrossRef]
- Song, S.; Qu, J.; Li, Y.; Zhou, W.; Guo, K. Fuzzy control method for a steering system consisting of a four-wheel individual steering and four-wheel individual drive electric chassis. J. Int. Fuzzy Syst. 2016, 31, 2941–2948. [Google Scholar] [CrossRef]
- Song, S.; Li, Y.; Qu, J.; Zhou, W.; Guo, K. Design and test of flexible chassis automatic tracking steering system. Int. J. Agric. Biol. Eng. 2017, 10, 45–54. [Google Scholar] [CrossRef] [Green Version]
- Clapp, T.G.; Eberhardt, A.C.; Kelley, C.T. Development and validation of a method for approximating road surface texture-induced contact pressure in tire-pavement interaction. Tire Sci. Technol. 1988, 16, 2–17. [Google Scholar] [CrossRef]
- Vo, A.T.; Kang, H.J. An Adaptive Neural Non-Singular Fast-Terminal Sliding-Mode Control for Industrial Robotic Manipulators. Appl. Sci. 2018, 8, 2562. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Huang, J. A Lyapunov’s direct method for the global robust stabilization of nonlinear cascaded systems. Automatica 2008, 44, 745–752. [Google Scholar] [CrossRef]
- Rodriguez, J.; Herman, C.; Gordillo, J.L. Design of an Adaptive Sliding Mode Control for a Micro-AUV Subject to Water Currents and Parametric Uncertainties. J. Mar. Sci. Eng. 2019, 7, 445. [Google Scholar] [CrossRef] [Green Version]
- Kumar, N.S.; Sadasivam, V.; Prema, K. Design and Simulation of Fuzzy Controller for Closed Loop Control of Chopper Fed Embedded DC Drives. In Proceedings of the IEEE international conference, Singapore, 21–24 November 2004; pp. 613–617. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Sentouh, C.; Zhang, H.; Popieul, J.C. Fuzzy Static Output Feedback Control for Path Following of Autonomous Vehicles with Transient Performance Improvements. IEEE Trans. Intell. Transp. Syst. 2019, 1–11. [Google Scholar] [CrossRef]
- Naranjo, J.E.; Sotelo, M.A.; Gonzalez, C.; García, R.; Pedro, T.D. Using fuzzy logic in automated vehicle control. IEEE Intell. Syst. 2007, 22, 36–45. [Google Scholar] [CrossRef]
- Qu, J.; Guo, K.; Li, Y.; Song, S.; Gao, H.; Zhou, W. Experiment and optimization of mode switching controlling parameters for agricultural flexible chassis. Trans. CSAM 2018, 49, 346–352. [Google Scholar] [CrossRef]
- Shrivastava, P.; Surendra, S.; Ranjan, R.K.; Shrivastav, A.; Priyadarshini, B. PI, PD and PID Controllers Using Single DVCCTA. Iran. J. Sci. Technol. Trans. Electr. Eng. 2019, 43, 673–685. [Google Scholar] [CrossRef]
- Coelho, L.D.S.; Pessoa, M.W. A tuning strategy for multivariable PI and PID controllers using differential evolution combined with chaotic Zaslavskii map. Expert Syst. Appl. 2011, 38, 13694–13701. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ∆Kp/∆Ki/∆Kd | ∆Ec | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | Z | PS | PM | PB | ||
| NB | PB/NB/PS | PB/NB/NS | PM/NM/NB | PS/NM/NB | PS/NS/NB | Z/Z/NM | Z/Z/PS | |
| NM | PB/NB/PS | PM/NB/NS | PM/NM/NB | PS/NS/NM | PS/NS/NM | Z/Z/NS | NS/Z/Z | |
| NS | PM/NM/Z | PM/NM/NS | PM/NS/NM | PS/NS/NM | Z/Z/NS | NS/PS/NS | NS/PS/Z | |
| Ec | Z | PM/NM/Z | PM/NM/NS | PS/NS/NS | Z/Z/NS | NS/PS/NS | NM/PS/NS | NM/PM/Z |
| PS | PS/NS/Z | PS/NS/Z | Z/Z/Z | NS/PS/Z | NS/PS/Z | NM/PM/Z | NM/PM/Z | |
| PM | PS/Z/PB | Z/Z/NS | NS/PS/PS | NM/PM/PS | NM/PM/PS | NM/PM/PS | NB/PB/PB | |
| PB | Z/Z/PB | Z/Z/PM | NM/PS/PM | NM/PM/PM | NM/PB/PS | NB/PB/PS | NB/PB/PB | |
| Parameter | Description | Value | Parameter | Description | Value |
|---|---|---|---|---|---|
| m | Mass of flexible chassis | 202.6 kg | d | Offset distance | 253 mm |
| h | Ground clearance | 300 mm | I | Yaw moment of inertia | 1275 kg·m2 |
| L | Distance between front and rear off-center shafts | 1210.6 mm | Bo | Viscous friction damping coefficient | 0.09 N·m /(rad·s−1) |
| B | Distance between left and right off-center shafts | 610.5 mm | Bm | Viscous friction damping coefficient | 0.07 N·m·s/rad |
| P | Rated power | 500W | Te | Electric wheel output torque | 35.4 N·m |
| J | Moment of inertia | 0.0007 kg·m2 | Cαfl | Tire cornering stiffness | 4600 N·rad−1 |
| Vr | Rated voltage | 48 V | Cαfr | Tire cornering stiffness | 4600 N·rad−1 |
| ωmr | Rated rotation speed | 500 r·min−1 | Cαrl | Tire cornering stiffness | 4600 N·rad−1 |
| r | Tire radius | 280 mm | Cαrr | Tire cornering stiffness | 4600 N·rad−1 |
| Tf | Tire damping | 500 N/m·s−1 | K | Constant coefficient | 2.3 |
| Tr | Rolling resistance coefficient | 0.012 | Jo | Moment of inertia | 0.0011 kg·m2 |
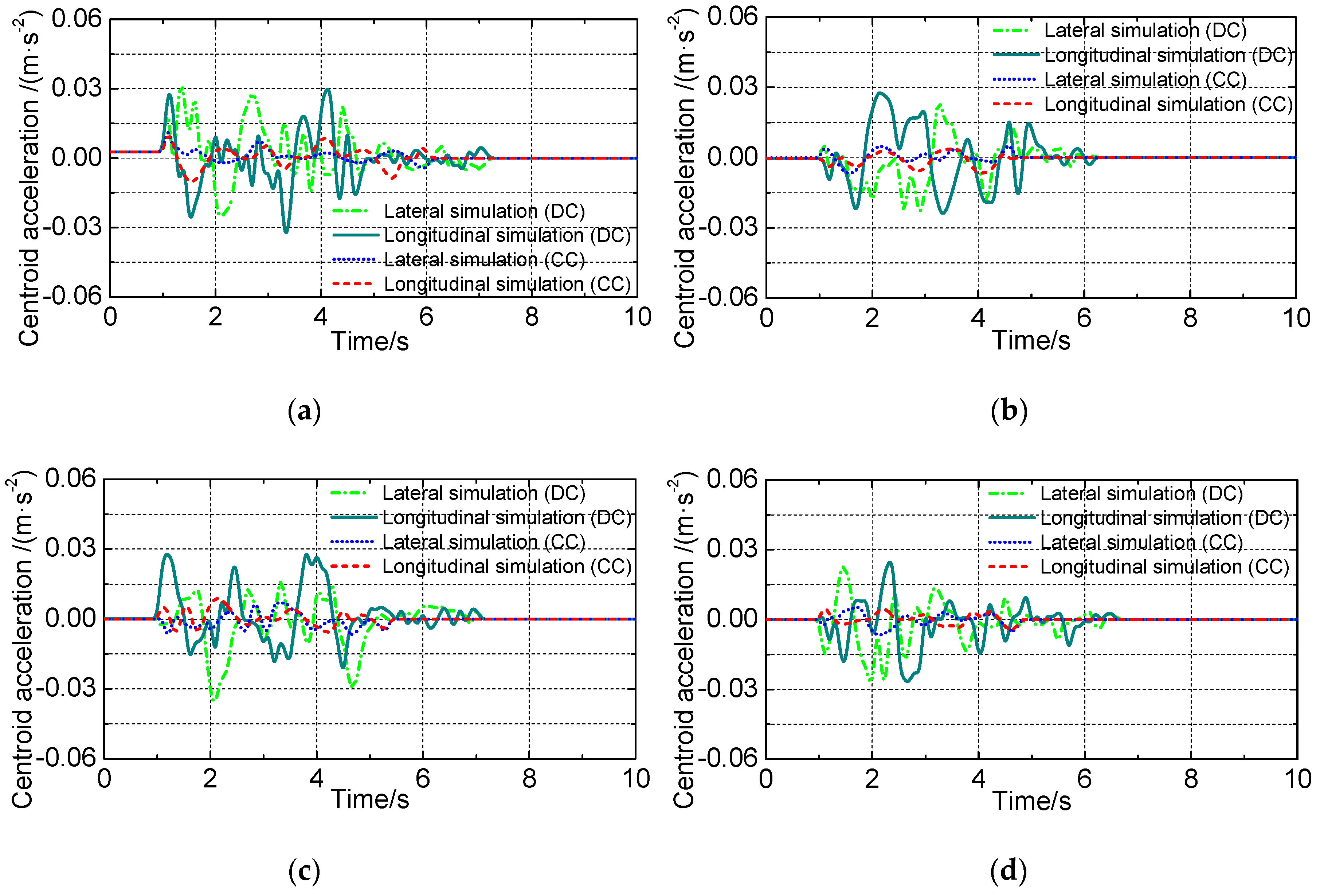
| Motion Types | Longitudinal Acceleration | Lateral Acceleration | ||
|---|---|---|---|---|
| Maximum Value/(m·s−2) | Average Value/(m·s−2) | Maximum Value/(m·s−2) | Average Value/(m·s−2) | |
| Cross motion | 0.057 | 0.007 | 0.056 | 0.005 |
| In-place rotation | 0.045 | 0.005 | 0.052 | 0.006 |
| Diagonal motion | 0.062 | 0.009 | 0.064 | 0.007 |
| Steering motion | 0.075 | 0.008 | 0.063 | 0.008 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, J.; Guo, K.; Zhang, Z.; Song, S.; Li, Y. Coupling Control Strategy and Experiments for Motion Mode Switching of a Novel Electric Chassis. Appl. Sci. 2020, 10, 701. https://doi.org/10.3390/app10020701
Qu J, Guo K, Zhang Z, Song S, Li Y. Coupling Control Strategy and Experiments for Motion Mode Switching of a Novel Electric Chassis. Applied Sciences. 2020; 10(2):701. https://doi.org/10.3390/app10020701
Chicago/Turabian StyleQu, Jiwei, Kangquan Guo, Zhenya Zhang, Shujie Song, and Yining Li. 2020. "Coupling Control Strategy and Experiments for Motion Mode Switching of a Novel Electric Chassis" Applied Sciences 10, no. 2: 701. https://doi.org/10.3390/app10020701
APA StyleQu, J., Guo, K., Zhang, Z., Song, S., & Li, Y. (2020). Coupling Control Strategy and Experiments for Motion Mode Switching of a Novel Electric Chassis. Applied Sciences, 10(2), 701. https://doi.org/10.3390/app10020701