High-Accuracy Location of Microseismic Events in a Strong Inhomogeneous Mining Environment by Optimized Global Full Waveform Inversion



Abstract
:1. Introduction
1.1. Calculation of the Green’s Function
1.2. Waveform Inversion-Based Location Methods
1.3. Green’s Function Database Generated Based on the Reciprocity Theorem
1.4. What Will Be Objectives of This Work
- (1)
- The SEM was used to effectively generate high-accurate 3D Green’s function in a mine region with complex structures, which overcomes the difficulties of modeling multi-path effects and focusing and defocusing effects in ray tracing methods.
- (2)
- A 3D Green’s function database in the mine was efficiently generated by the reciprocity theorem and served as multi-scale grid-search strategy, which largely improves the computational efficiency of 3D GSWI location.
- (3)
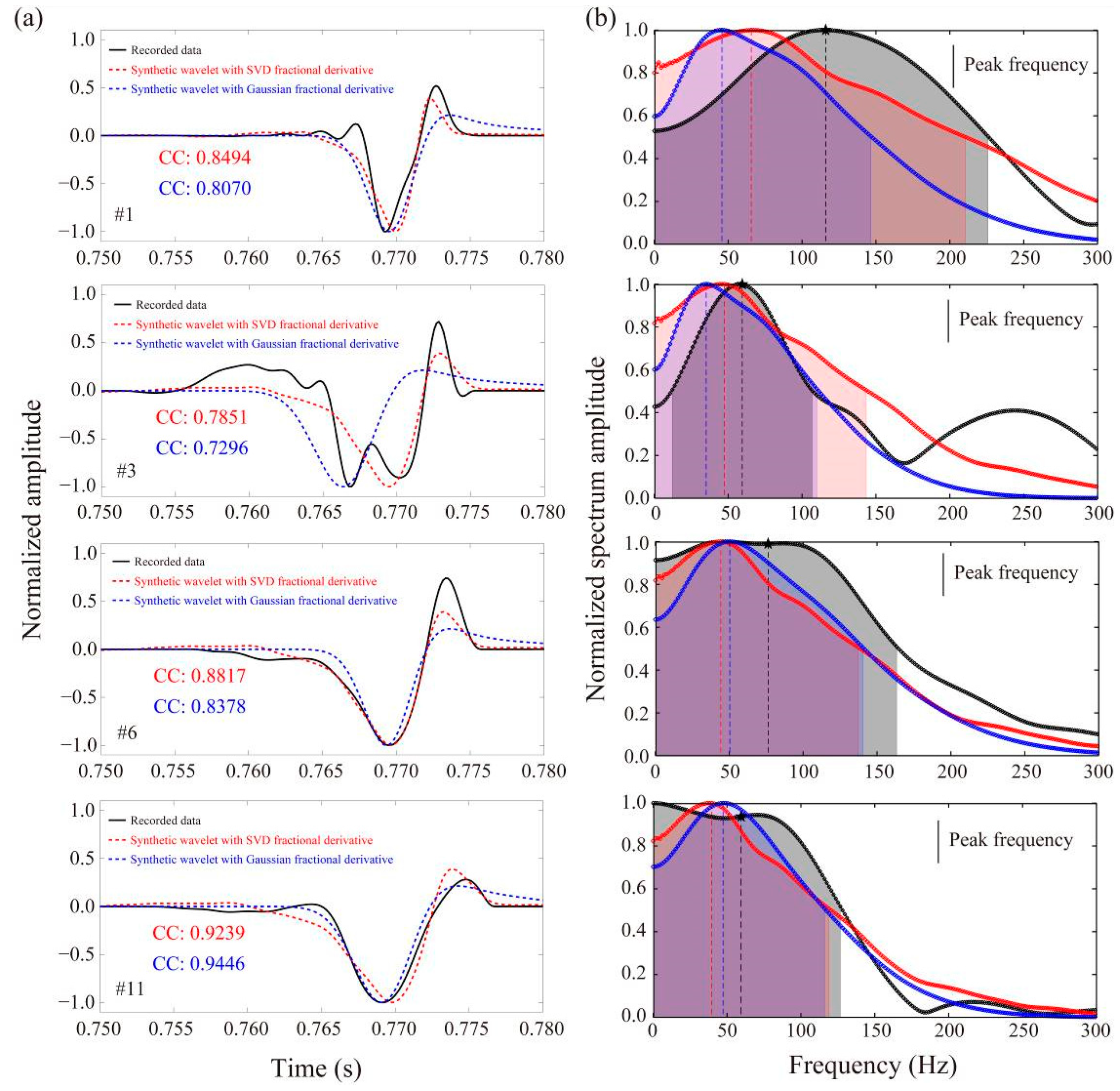
- Both the data-driven SVD-averaged fractional derivative based wavelet function (DD-SVD-FD wavelet) obtained by windowed specified seismic phases and traditional fractional-order Gaussian wavelet can be used for estimating the source-time function to generate synthetic waveforms for waveform inversion well. By comparing them, waveforms synthesized by the DD-SVD-FD wavelet have a higher accuracy and more reasonable physical explanation.
- (4)
- Synthetic test results show that the accuracy of velocity model is important for waveform inversion-based location, and the average location error of eight blasting events is only 15.0 m. The location error is smaller than the 3D ray tracing-based location method (average location error 26.2 m) under the same 3D velocity model.
2. Methodology
2.1. Synthetic Waveforms Based on the Reciprocity Theorem
2.2. Source-Time Function Estimation
2.3. Wavefield Modeling Based on Acoustic Wave Equation
2.4. Numerical Wavefield Modeling Conditions
3. Synthetic Test
4. Application
4.1. Engineering Background and Multi-Scale Grid Generation
4.2. Case of Waveform Modeling and Source-Time Function Estimating
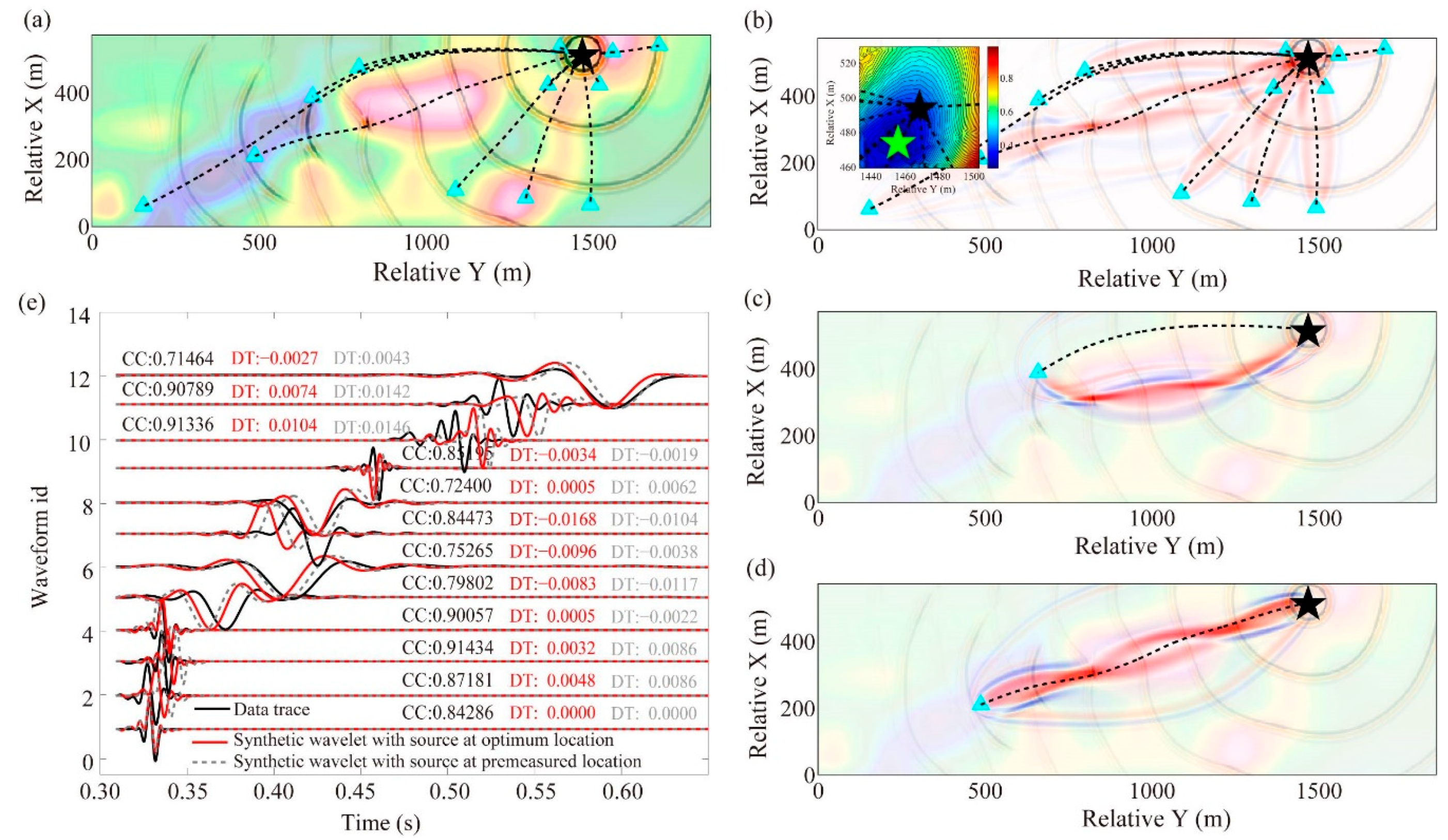
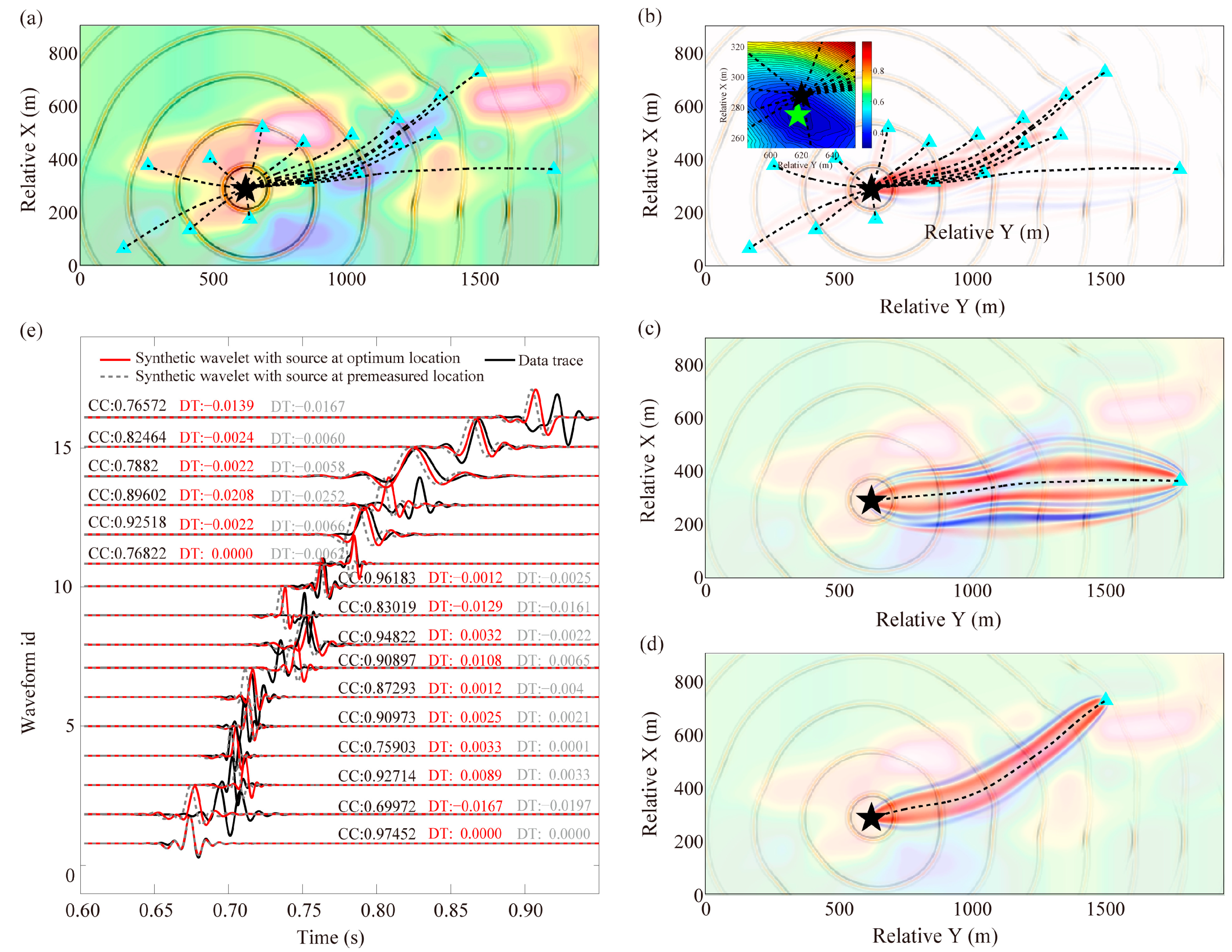
4.3. MS Location Examples
4.4. MS Location Results
5. Discussions
5.1. 3D Green’s Function Database Modeling
5.2. Estimation of the Source-Time Function
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Feng, G.L.; Feng, X.-T.; Chen, B.R.; Xiao, Y.X.; Jiang, Q. Sectional velocity model for microseismic source location in tunnels. Tunn. Undergr. Space Technol. 2015, 45, 73–83. [Google Scholar] [CrossRef]
- Shang, X.; Tkalčić, H. Point-source inversion of small and moderate earthquakes from P-wave polarities and P/S amplitude ratios within a hierarchical Bayesian framework: Implications for the Geysers earthquakes. J. Geophys. Res.-Sol. Ea. 2020, 125, e2019JB018492. [Google Scholar] [CrossRef]
- Feng, G.L.; Feng, X.T.; Chen, B.R.; Xiao, Y.X.; Liu, G.F.; Zhang, W.; Hu, L. Characteristics of microseismicity during breakthrough in deep tunnels: Case study of Jinping-II hydropower station in China. Int. J. Geomech. 2020, 20, 04019163. [Google Scholar] [CrossRef]
- Dong, L.J.; Zou, W.; Sun, D.Y.; Tong, X.J.; Li, X.B.; Shu, W.W. Some developments and new insights for microseismic/acoustic emission source localization. Shock Vib. 2019, 2019, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Karasözen, E.; Karasözen, B. Earthquake location methods. Int. J. Geomath. 2020, 11. [Google Scholar] [CrossRef]
- Wang, Y.; Shang, X.; Peng, K. Relocating mining microseismic earthquakes in a 3-D velocity model using a windowed cross-correlation technique. IEEE Access 2020, 8, 37866–37878. [Google Scholar] [CrossRef]
- Wang, Y.; Shang, X.; Peng, K. Locating mine microseismic events in a 3D velocity model through the Gaussian beam reverse-time migration technique. Sensors 2020, 20, 2676. [Google Scholar] [CrossRef]
- Kim, Y.; Liu, Q.; Tromp, J. Adjoint centroid-moment tensor inversions: Adjoint centroid-moment tensor inversions. Geophys. J. Int. 2011, 186, 264–278. [Google Scholar] [CrossRef] [Green Version]
- Witten, B.; Shragge, J. Image-domain velocity inversion and event location for microseismic monitoring. Geophysics 2017, 82, KS71–KS83. [Google Scholar] [CrossRef]
- Witten, B.; Shragge, J. Microseismic image-domain velocity inversion: Marcellus Shale case study. Geophysics 2017, 82, KS99–KS112. [Google Scholar] [CrossRef]
- Li, L.; Tan, J.; Schwarz, B.; Staněk, F.; Poiata, N.; Shi, P.; Diekmann, L.; Eisner, L.; Gajewski, D. Recent advances and challenges of waveform-based seismic location methods at multiple scales. Rev. Geophys. 2020, 58, e2019RG000667. [Google Scholar] [CrossRef]
- Tkalčić, H.; Dreger, D.S.; Foulger, G.R.; Julian, B.R. The puzzle of the Bardarbunga, Iceland earthquake: No volumetric component in the source mechanism. Bull. Seismol. Soc. Am. 2009, 99, 3077–3085. [Google Scholar] [CrossRef]
- Hsu, Y.J.; Simons, M.; Williams, C. Three-dimensional FEM derived elastic Green’s functions for the coseismic deformation of the 2005 Mw 8.7 Nias-Simeulue, Sumatra earthquake. Geochem. Geophys. Geosystems 2011, 12, Q07013. [Google Scholar] [CrossRef] [Green Version]
- Zeng, H.R.; Song, H.Z. Inversion of source mechanism of 1989 Loma Prieta earthquake by three-dimensional FEM Green’s function. Acta Seismol. Sin. 1999, 12, 249–256. [Google Scholar] [CrossRef]
- Eisner, L.; Clayton, R.W. Simulating strong ground motion from complex sources by reciprocal Green functions. Stud. Geophys. Geod. 2005, 49, 323–342. [Google Scholar] [CrossRef] [Green Version]
- Bignardi, S.; Fedele, F.; Yezzi, A. Geometric seismic-wave inversion by the boundary element method geometric seismic. Bull. Seismol. Soc. Am. 2012, 102, 802–811. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.; Zhao, Z.; Xu, J.; Kubota, R. Synthetic seismograms of ground motion near earthquake fault using simulated Green’s function method. Chin. Sci. Bull. 2006, 51, 3018–3025. [Google Scholar] [CrossRef]
- Semblat, J.F. Modeling seismic wave propagation and amplification in 1D/2D/3D linear and nonlinear unbounded media. Int. J. Geomech. 2011, 11, 440–448. [Google Scholar] [CrossRef] [Green Version]
- Komatitsch, D.; Vilotte, J.P. The spectral element method: An efficient tool to simulate the seismic response of 2D and 3D geological structures. Bull. Seismol. Soc. Am. 1998, 88, 368–392. [Google Scholar]
- Komatitsch, D.; Ritsema, J.; Tromp, J. The spectral-element method, Beowulf computing, and global seismology. Science 2002, 298, 1737–1742. [Google Scholar] [CrossRef] [Green Version]
- Fichtner, A.; Kennett, B.L.N.; Igel, H. Synthetic background for continental-and global-scale full-waveform inversion in the time-frequency domain. Geophys. J. Int. 2008, 175, 665–685. [Google Scholar] [CrossRef] [Green Version]
- Tape, C.; Liu, Q.; Maggi, A. Adjoint tomography of the southern California crust. Science 2009, 325, 988–992. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Polet, J.; Komatitsch, D. Spectral-element moment tensor inversions for earthquakes in Southern California. Bull. Seismol. Soc. Am. 2004, 94, 1748–1761. [Google Scholar] [CrossRef]
- Hejrani, B.; Tkalčić, H.; Fichtner, A. Centroid moment tensor catalogue using a 3-D continental scale Earth model: Application to earthquakes in Papua New Guinea and the Solomon Islands. J. Geophys. Res. Solid Earth 2017, 122, 5517–5543. [Google Scholar] [CrossRef]
- Hejrani, B.; Tkalčić, H. The 20 May 2016 Petermann ranges earthquake: Centroid location, magnitude and focal mechanism from full waveform modelling. Aust. J. Earth Sci. 2019, 66, 37–45. [Google Scholar] [CrossRef]
- McMechan, G.A. Determination of source parameters by wavefield extrapolation. Geophys. J. Int. 1982, 71, 613–628. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; McMechan, G.A. Elastic full-waveform inversion for earthquake source parameters. Geophys. J. Int. 1996, 127, 61–74. [Google Scholar] [CrossRef] [Green Version]
- Sen, A.T.; Cesca, S.; Bischoff, M.; Meier, T.; Dahm, T. Automated full moment tensor inversion of coal mining-induced seismicity. Geophys. J. Int. 2013, 195, 1267–1281. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.; Dong, L.; Zhao, G.; Li, X. Focal Mechanism of mining-induced seismicity in fault zones: A case study of Yongshaba mine in China. Rock Mech. Rock Eng. 2019, 52, 3341–3352. [Google Scholar] [CrossRef]
- Cesca, S.; Grigoli, F.; Heimann, S.; Gonzalez, A.; Buforn, E.; Maghsoudi, S.; Blanch, E.; Dahm, T. The 2013 September-October seismic sequence offshore Spain: A case of seismicity triggered by gas injection? Geophys. J. Int. 2014, 198, 941–953. [Google Scholar] [CrossRef] [Green Version]
- Jarillo Michel, O.; Tsvankin, I. Waveform inversion for microseismic velocity analysis and event location in VTI media. Geophysics 2017, 82, WA95–WA103. [Google Scholar] [CrossRef]
- Michel, O.J.; Tsvankin, I. 3D waveform inversion of downhole microseismic data for transversely isotropic media. Geophys. Prospect. 2019, 67, 2332–2342. [Google Scholar] [CrossRef] [Green Version]
- Igonin, N.; Innanen, K. Analysis of simultaneous velocity and source parameter updates in microseismic FWI. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Tulsa, OK, USA, 2018. [Google Scholar]
- Wang, H.; Alkhalifah, T. Microseismic imaging using a source function independent full waveform inversion method. Geophys. J. Int. 2018, 214, 46–57. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, I.V.; Sacchi, M.; Gu, Y.J. Simultaneous recovery of origin time, hypocentre location and seismic moment tensor using sparse representation theory. Geophys. J. Int. 2012, 188, 1188–1202. [Google Scholar] [CrossRef]
- Shekar, B.; Sethi, H.S. Full-waveform inversion for microseismic events using sparsity constraints. Geophysics 2018, 84, KS1–KS12. [Google Scholar] [CrossRef]
- Tong, P.; Yang, D.; Liu, Q.; Yang, X.; Harris, J. Acoustic wave-equation-based earthquake location. Geophys. J. Int. 2016, 205, 464–478. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.; Dong, L.; Liu, Y.; Yang, J. Acoustic wave-equation based full-waveform microseismic source location using improved scattering-integral approach. Geophys. J. Int. 2017, 209, 1476–1488. [Google Scholar] [CrossRef]
- Huang, C.; Dong, L.G.; Liu, Y.Z.; Yang, J.Z. Waveform-based source location method using a source parameter isolation strategy. Geophysics 2017, 82, KS85–KS97. [Google Scholar] [CrossRef]
- Tarantola, A. Inversion of seismic reflection data in the acoustic approximation. Geophysics 1984, 49, 1259–1266. [Google Scholar] [CrossRef]
- Bouchon, M. Teleseismic body wave radiation from a seismic source in a layered medium. Geophys. J. Int. 1976, 47, 515–530. [Google Scholar] [CrossRef] [Green Version]
- Graves, R.; Wald, D. Resolution analysis of finite fault source inversion using 1D and 3D Green’s functions: 1. Strong motions. J. Geophys. Res. 2001, 106, 8745–8766. [Google Scholar] [CrossRef]
- Eisner, L.; Clayton, W. A reciprocity method for multiple-source simulations. Bull. Seismol. Soc. Am. 2001, 91, 553–560. [Google Scholar] [CrossRef]
- Eisner, L.; Clayton, R.W. A Full waveform test of the Southern California velocity model by the reciprocity method. Pure Appl. Geophys. 2002, 159, 1691–1706. [Google Scholar] [CrossRef] [Green Version]
- Lee, E.J.; Chen, P.; Jordan, T.H.; Wang, L. Rapid full-wave centroid moment tensor (CMT) inversion in a three-dimensional earth structure model for earthquakes in Southern California. Geophys. J. Int. 2011, 186, 311–330. [Google Scholar] [CrossRef] [Green Version]
- Zhu, L.; Zhou, X. Seismic moment tensor inversion using 3D velocity model and its application to the 2013 Lushan earthquake sequence. Phys. Chem. Earth Parts A B C 2016, 95, 10–18. [Google Scholar] [CrossRef] [Green Version]
- Seriani, G.; Priolo, E. Spectral element method for acoustic wave simulation in heterogeneous media. Finite Elem. Anal. Des. 1994, 16, 337–348. [Google Scholar] [CrossRef]
- Wang, Y. Frequencies of the Ricker wavelet. Geophysics 2015, 80, A31–A37. [Google Scholar] [CrossRef] [Green Version]
- Freire, S.; Ulrych, T. Application of singular value decomposition to vertical seismic profiling. Geophysics 1988, 53, 778–785. [Google Scholar] [CrossRef]
- Wang, Z.; Li, X.; Zhao, D.; Shang, X.; Dong, L. Time-lapse seismic tomography of an underground mining zone. Int. J. Rock Mech. Mini. 2018, 107, 136–149. [Google Scholar] [CrossRef]
- Virieux, J.; Operto, S. An overview of full-waveform inversion in exploration geophysics. Geophysics 2009, 74, WCC1–WCC26. [Google Scholar] [CrossRef]
- Li, X.; Shang, X.; Wang, Z.; Dong, L.; Weng, L. Identifying P-phase arrivals with noise: An improved Kurtosis method based on DWT and STA/LTA. J. Appl. Geophys. 2016, 133, 50–61. [Google Scholar] [CrossRef]
- Shang, X.; Li, X.; Morales-Esteban, A.; Chen, G. Improving microseismic event and quarry blast classification using artificial neural networks based on principal component analysis. Soil Dyn. Earthq. Eng. 2017, 99, 142–149. [Google Scholar] [CrossRef]
- Wu, Q.; Li, X.; Weng, L.; Li, Q.; Zhu, Y.; Luo, R. Experimental investigation of the dynamic response of prestressed rockbolt by using an SHPB-based rockbolt test system. Tunn. Undergr. Space Technol. 2019, 93, 103088. [Google Scholar] [CrossRef]
- Si, X.; Gong, F. Strength-weakening effect and shear-tension failure mode transformation mechanism of rockburst for fine-grained granite under triaxial unloading compression. Int. J. Rock Mech. Min. Sci. 2020, 131, 104347. [Google Scholar] [CrossRef]
- Shang, X.; Li, X.; Morales-Esteban, A.; Dong, L. Enhancing micro-seismic P-phase arrival picking: EMD-cosine function-based denoising with an application to the AIC picker. J. Appl. Geophys. 2018, 150, 325–337. [Google Scholar] [CrossRef]
- Dong, L.; Shu, W.; Li, X.; Han, G.; Zou, W. Three dimensional comprehensive analytical solutions for locating sources of sensor networks in unknown velocity mining system. IEEE Access 2017, 5, 11337–11351. [Google Scholar] [CrossRef]
- Dong, L.; Zou, W.; Li, X.; Shu, W.; Wang, Z. Collaborative localization method using analytical and iterative solutions for microseismic/acoustic emission sources in the rockmass structure for underground mining. Eng. Fract. Mech. 2019, 210, 95–112. [Google Scholar] [CrossRef]
- Li, X.B.; Wang, Z.W.; Dong, L.J. Locating single-point sources from arrival times containing large picking errors (LPEs): The virtual field optimization method (VFOM). Sci. Rep. 2016, 6, 19205. [Google Scholar] [CrossRef] [Green Version]
- Lee, W.; Lahr, J. A computer program for determining local earthquake hypocenter, magnitude, and first motion pattern of local earthquakes. US Geol. Surv. Rep. 1975, 75, 1–116. [Google Scholar]
- Rawlinson, N.; Sambridge, M. Wave front evolution in strongly heterogeneous layered media using the fast marching method. Geophys. J. Int. 2004, 156, 631–647. [Google Scholar] [CrossRef] [Green Version]
- Waldhauser, F.; Ellsworth, W.L. A Double-difference earthquake location algorithm: Method and application to the Northern Hayward Fault, California. Bull. Seismol. Soc. Am. 2000, 90, 1353–1368. [Google Scholar] [CrossRef]
- Fichtner, A.; Trampert, J.; Cupillard, P.; Saygin, E.; Taymaz, T.; Capdeville, Y.; Villaseñor, A. Multiscale full waveform inversion. Geophys. J. Int. 2013, 194, 534–556. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event id | Event Location (m) | Location Error (m) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| X | Y | Z | Shang et al. [56] | Dong et al. [57] | Li et al. [59] | Wang et al. [6] | Wang et al. [7] | GSWI Location | |
| 1 | 381,683 | 2,997,760 | 1107 | 84.8 | 61.1 | 31.1 | 32.6 | 23.0 | 25.0 |
| 2 | 381,653 | 2,997,405 | 1099 | 22.4 | 21.1 | 14.8 | |||
| 3 | 381,194 | 2,996,224 | 1014 | 27.6 | 28.7 | 49.4 | 14.3 | 5.1 | 14.0 |
| 4 | 381,684 | 2,997,777 | 1107 | 3878.2 | 30.8 | 29.8 | 24.2 | 15.6 | |
| 5 | 381,503 | 2,997,036 | 1028 | 28.5 | 7.2 | 7.8 | |||
| 6 | 381,590 | 2,997,278 | 1053 | 70.1 | 52.4 | 49.0 | 30.8 | 23.8 | 21.5 |
| 7 | 381,526 | 2,997,584 | 1044 | 55.0 | 48.8 | 24.5 | 18.2 | 6.7 | |
| 8 | 381,442 | 2,998,029 | 1017 | 143.5 | 42.8 | 26.6 | 13.8 | 14.6 | |
| Average | 709.9 | 47.4 | 42.0 | 26.2 | 17.0 | 15.0 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Shang, X.; Wang, Z.; Gao, R. High-Accuracy Location of Microseismic Events in a Strong Inhomogeneous Mining Environment by Optimized Global Full Waveform Inversion. Appl. Sci. 2020, 10, 7205. https://doi.org/10.3390/app10207205
Wang Y, Shang X, Wang Z, Gao R. High-Accuracy Location of Microseismic Events in a Strong Inhomogeneous Mining Environment by Optimized Global Full Waveform Inversion. Applied Sciences. 2020; 10(20):7205. https://doi.org/10.3390/app10207205
Chicago/Turabian StyleWang, Yi, Xueyi Shang, Zewei Wang, and Rui Gao. 2020. "High-Accuracy Location of Microseismic Events in a Strong Inhomogeneous Mining Environment by Optimized Global Full Waveform Inversion" Applied Sciences 10, no. 20: 7205. https://doi.org/10.3390/app10207205
APA StyleWang, Y., Shang, X., Wang, Z., & Gao, R. (2020). High-Accuracy Location of Microseismic Events in a Strong Inhomogeneous Mining Environment by Optimized Global Full Waveform Inversion. Applied Sciences, 10(20), 7205. https://doi.org/10.3390/app10207205