An Approach to Human Walking Analysis Based on Balance, Symmetry and Stability Using COG, ZMP and CP

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Stability Indices in Walking
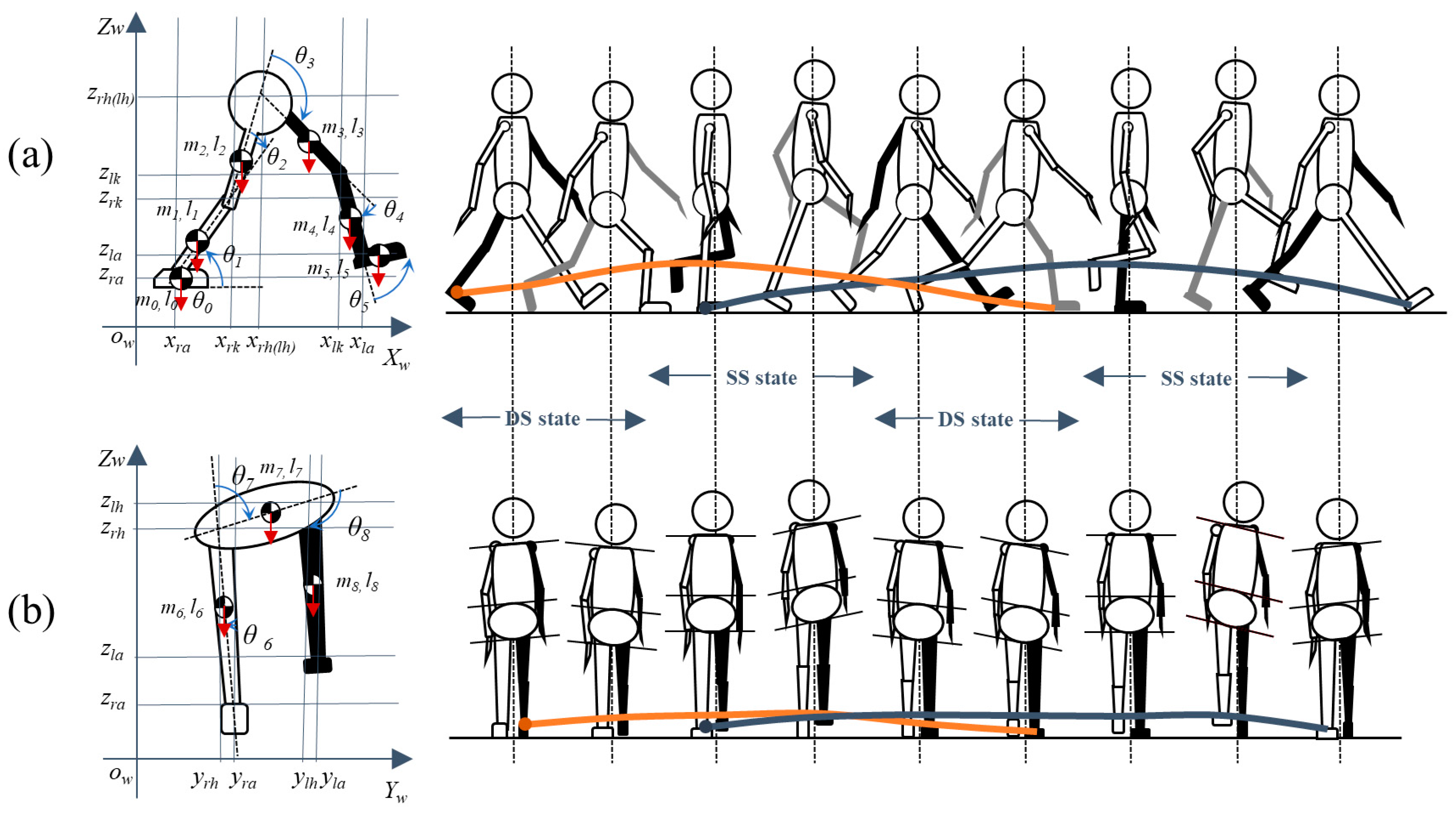
2.1. Human Walking Modeling
2.2. Stability Index
2.2.1. Conventional COG and ZMP
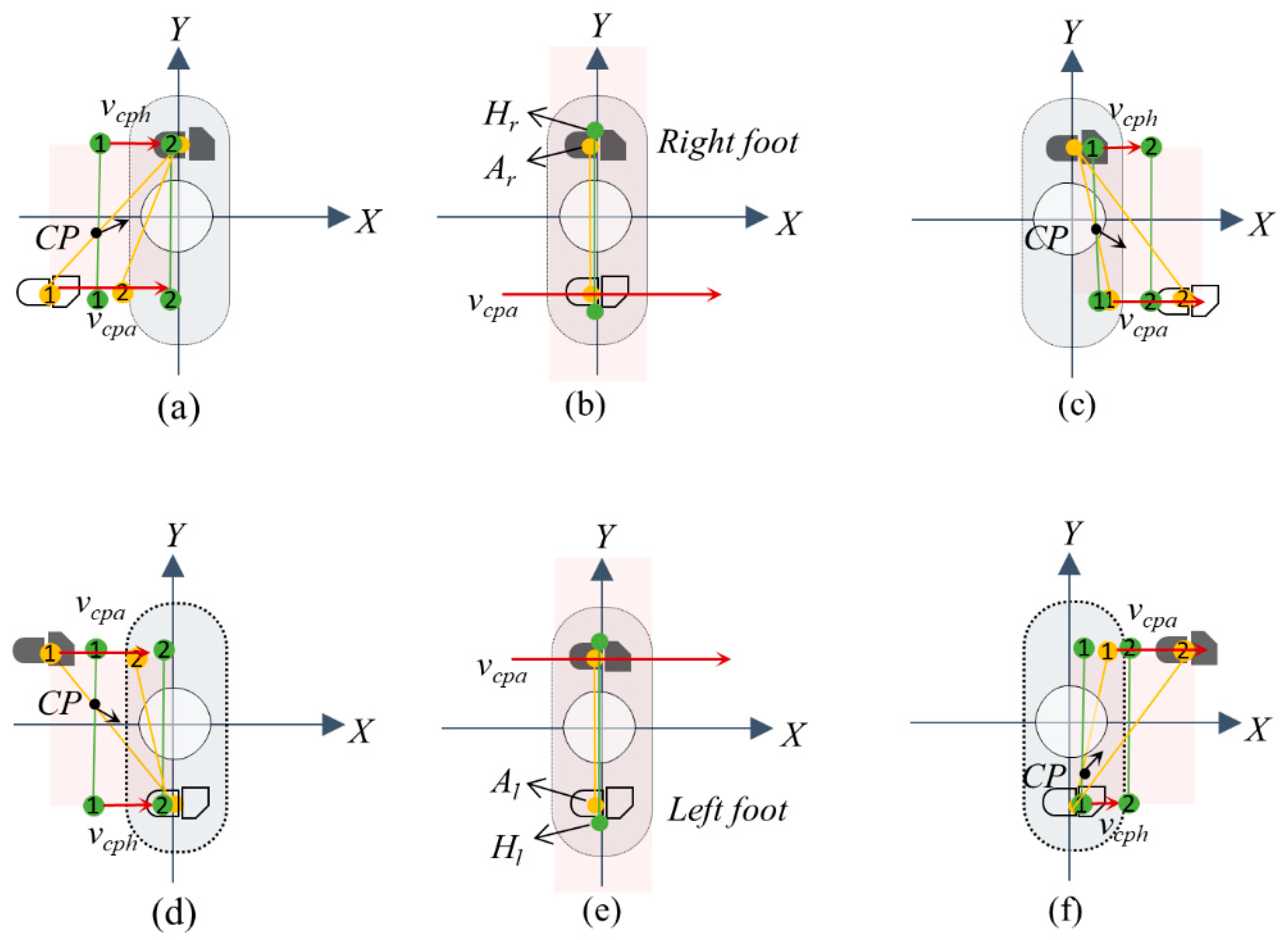
2.2.2. Proposed CP
3. Simulation
3.1. Robot Design and Controller
3.2. Results of Robot Walking
3.2.1. Joint Torque with NF
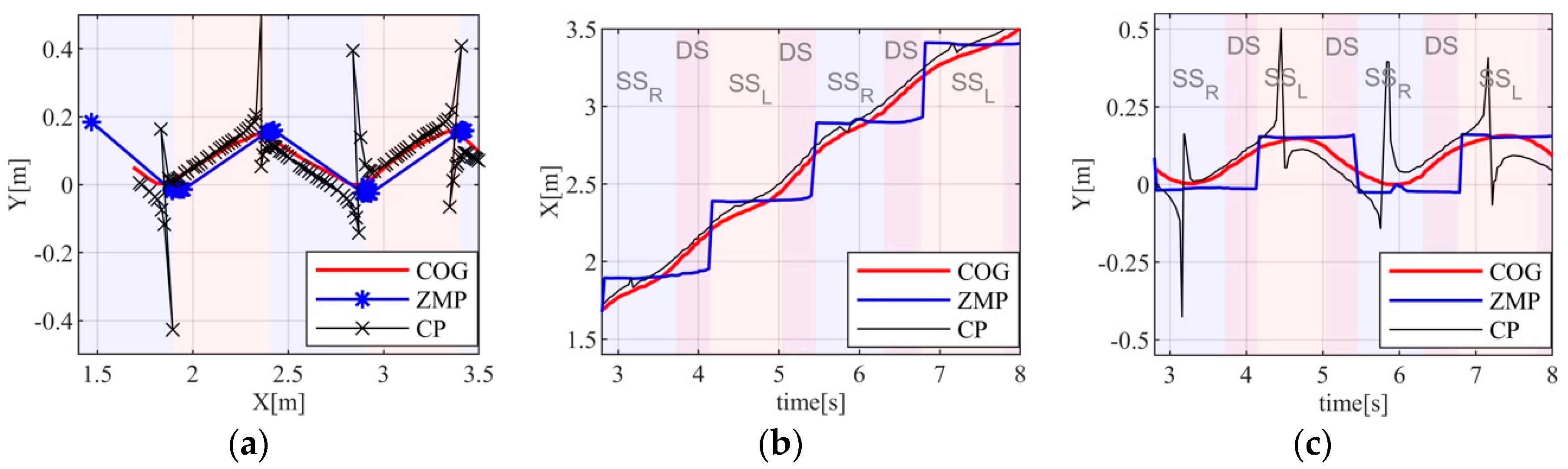
3.2.2. Stability Indices and CP
4. Experiment
- The total distance for the test walk is 4 m, which is a valid length of detection for the Kinect.
- The subject does not step on the line drawn in advance at 40 cm intervals based on the width of the subject’s average stride.
4.1. CP with Foot Pressure
4.2. Stability Indices with CP
5. Discussion
5.1. Symmetry, Balance, and Stability between Indices
5.2. Comparison between Stability Indices and CP
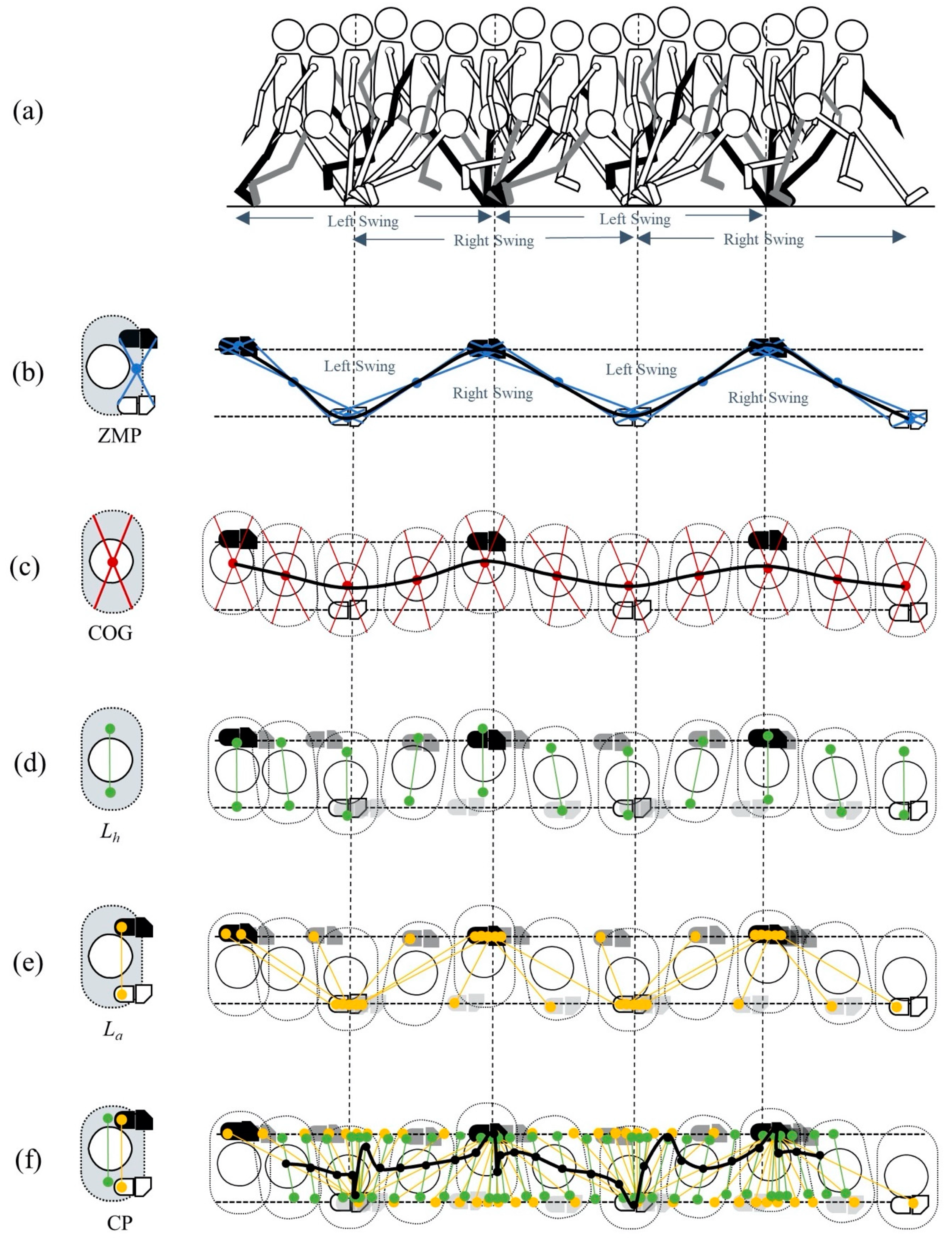
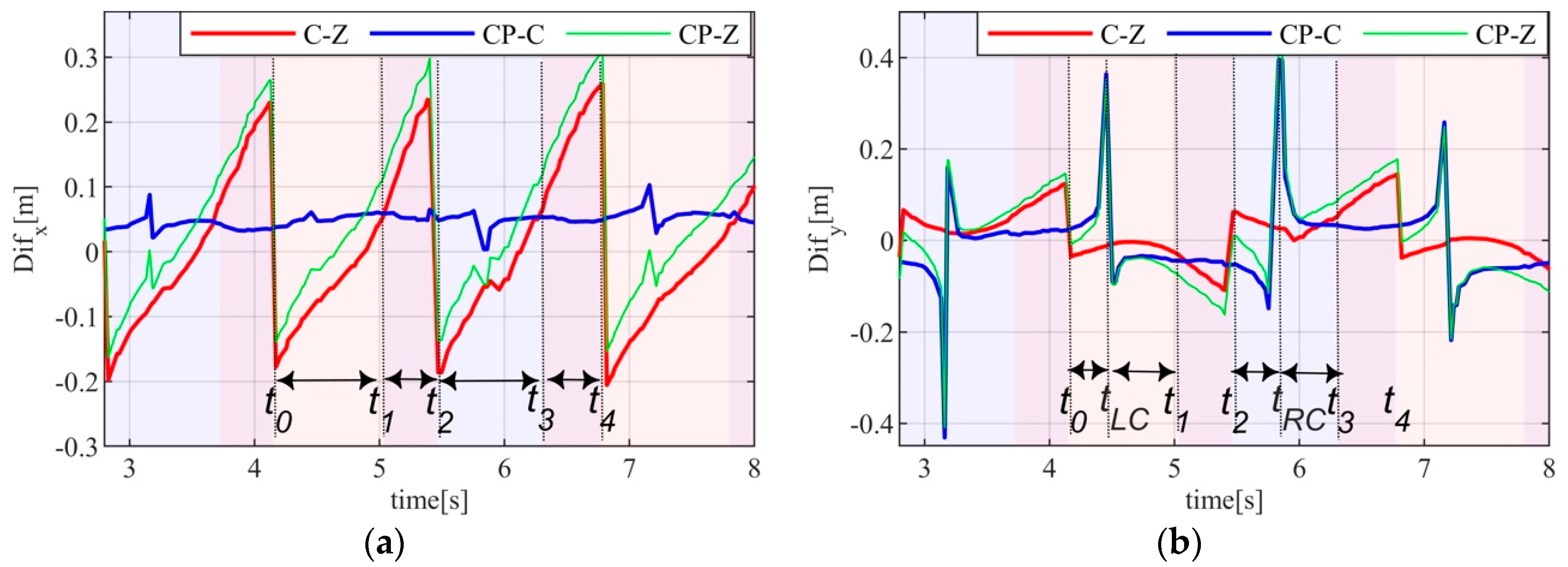
5.2.1. Classification of Walking State
- t0~t1 (SSL): the single stance by the left limb is from t0 of the lowest value of C-Z until t1, where C-Z is the same as CP-C.
- t1~t2 (DS): the double stance is from t1 until t2, where C-Z or CP-Z is inverted.
- t2~t3 (SSR): the single stance by the right limb is from t2 until t3, where C-Z is the same as CP-C.
- t3~t4 (DS): the double stance is from t3 until t4, where C-Z or CP-Z is inverted.
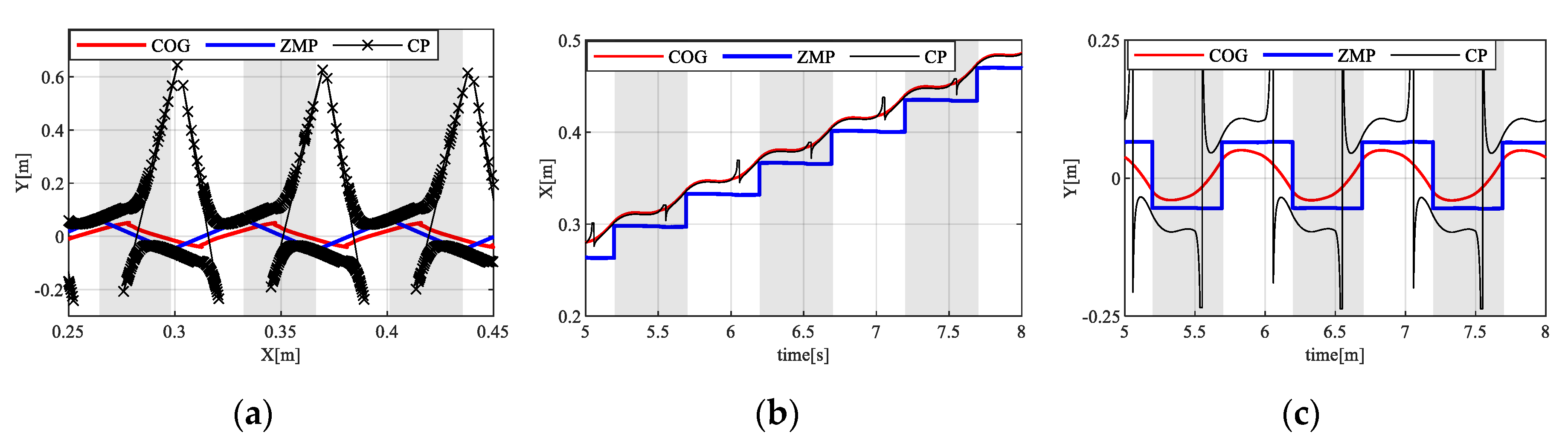
- t0~tLC (HPL): the load point is on the heel in SSL from t0 until tLC, where the values of CP-C and CP-Z go down sharply.
- TLC~t1 (TPL): the load point is on the toe in SSL from tLC until t1.
- t2~tRC (HPR): the load point is on the heel in SSR from t2 until tRC, where the values of CP-C and CP-Z increase dramatically.
- tRC~t3 (TPR): the load point is on the toe in SSR from tRC until t3.
5.2.2. CP with Downward Force of Body
5.2.3. Comparison between Indices by SD and RMSE
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Muro-de-la-Herran, A.; Garcia-Zapirain, B.; Mendez-Zorrilla, A. Gait analysis methods: An overview of wearable and non-wearable systems, highlighting clinical applications. Sensors (Basel) 2014, 14, 3362–3394. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chunqian, F.; Xingson, W. Force-Shoes ZMP Measuring System for Human Walker. In Proceedings of the IEEE International Conference on Mechatronics and Machine Vision in Practice, Auckland, New Zealand, 2–4 December 2008; pp. 527–532. [Google Scholar]
- Yang, W.; Tang, C.; Chen, Y.; Xu, L. Simulation of Exoskeleton ZMP during Walking for Balance Control. In Proceedings of the IEEE International Conference on Mechanical and Intelligent Manufacturing Technologies, Cape Town, South Africa, 10–13 February 2018; pp. 172–176. [Google Scholar]
- Astudillo, D.; Minchala, L.I.; Astudillo-Salinas, F.; Vazquez-Rodas, A.; Gonzalez, L. A simple mapping methodology of gait biomechanics for walking control of a biped robot. In Proceedings of the IEEE International Conference on Electronics, Electrical Engineering and Computing, Lima, Peru, 8–10 August 2018; pp. 1–4. [Google Scholar]
- Kim, S.; Hirota, K.; Nozaki, T.; Murakami, T. Human Motion Analysis and Its Application to Walking Stabilization with COG and ZMP. IEEE Trans. Ind. Inform. 2018, 14, 5178–5186. [Google Scholar] [CrossRef]
- Lai, W.; Huang, H.; Chen, J. Real-time Control of a Humanoid Robot. In Proceedings of the IEEE International Conference on Advanced Robotics and Intelligent Systems, Taipei, Taiwan, 6–8 September 2018; pp. 17–23. [Google Scholar]
- Luo, R.; Chen, C. Quasi-Natural Humanoid Robot Walking Trajectory Generator Based on Five-Mass with Angular Momentum Model. IEEE Trans. Ind. Electron. 2018, 65, 3355–3364. [Google Scholar] [CrossRef]
- Guo, Z.; Wang, Z.; Yan, Z.; Zhang, L.; Ma, X.; Wu, X. Stable Control Gait Planning Strategy for A Rehabilitation Exoskeleton Robot. In Proceedings of IEEE International Conference on Mechatronics and Automation, Tianjin, China, 4–7 August 2019; pp. 1265–1270. [Google Scholar]
- Hong, Y. Capture Point-Bsed Controller Using Real-Time Zero Moment Point Manipulation for Stable Bipedal Walking in Human Environment. Sensors 2019, 19, 3407. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kajita, S.; Benallegue, M.; Cisneros, R.; Sakaguchi, T.; Morisawa, M.; Kaminaga, H.; Kumagai, I.; Kaneko, K.; Kanehiro, F. Position-Based Lateral Balance Control for Knee-Stretched Biped Robot. In Proceedings of IEEE International Conference on Humanoid Robots, Toronto, ON, Canada, 15–17 October 2019; pp. 17–24. [Google Scholar]
- Ortiz, A.; Ibarra, J. Walk stability control for position-controlled servo actuated humanoid robot. In Proceedings of the IEEE International Conference on Electrical Engineering, Computing Science and Automatic Control, Mexico City, Mexico, 11–13 September 2019. [Google Scholar]
- Raoufi, M.; Edrisi, M. Designing a Fractional Order Back-Stepping Controller Based on GPI Observer for a 3D Biped Robot. In Proceedings of the IEEE International Conference on Robotics and Mechatronics, Tehran, Iran, 20–21 November 2019; pp. 211–216. [Google Scholar]
- Soliman, A.; Sendur, P.; Ugurlu, B. 3-D Dynamic Walking Trajectory Generation for a Bipedal Exoskeleton with Underactuated Legs: A Proof of Concept. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Toronto, ON, Canada, 24–28 June 2019; pp. 599–604. [Google Scholar]
- Tesio, L.; Rota, V. The Motion of Body Center of Mass During Walking: A Review Oriented to Clinical Applications. Front. Neurol. 2019, 10, 1–22. [Google Scholar] [CrossRef] [PubMed]
- Olney, S.J.; Richards, C. Hemiparetic gait following stroke. Part I: Characteristics. Gait Posture 1996, 4, 136–148. [Google Scholar] [CrossRef]
- Collins, S.H. Dynamic Walking Principles Applied to Human Gait. Ph.D. Thesis, The University of Michigan, Ann Arbor, MI, USA, 2008. [Google Scholar]
- Kiguchi, K.; Tamura, K.; Hayashi, Y. Estimation of Joint Force/Torque Based on EMG signals. In Proceedings of the 2013 IEEE Workshop on Robotic Intelligence in Informationally Structured Space, Singapore, 16–19 April 2013; pp. 20–24. [Google Scholar]
- Shamei, K.; Cenciarini, M.; Adams, A.; Gregorczyk, K.N.; Schiffman, J.M.; Dollar, A.M. Biomechanical Effects of Stiffness in Parallel with the Knee Joint during Walking. IEEE Trans. Biomed. Eng. 2015, 62, 2389–2401. [Google Scholar] [CrossRef] [PubMed]
- Fino, C.P.; Mancini, M. Phase-dependent Effects of Closed-Loop Tactile Feedback on Gait Stability in Parkinson’s disease. IEEE Trans. Neural Syst. Rehabilitation Eng. 2020, 28, 1636–1641. [Google Scholar] [CrossRef] [PubMed]
- Kagawa, T.; Nomura, T.; Kondo, S. Interlimb Parallel-link Powered Orthosis (IPPO): Compact Wearable Robot with Lateral Weight Bearing Mechanisms for Gait Assistance. IEEE Trans. Med. Robot. Bionics 2020, 2, 300–308. [Google Scholar] [CrossRef]
- Ng, K.; Mehdizadeh, S.; Iaboni, A.; Mansfield, A.; Flint, A.; Taati, B. Measuring Gait Variables Using Computer Vision to Assess Mobility and Fall Risk in Older Adults with Dementia. IEEE J. Transl. Eng. Health Med. 2020, 8, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Bhat, S.A.; Mehbodniya, A.; Alwakeel, A.E.; Al-Begain, K. Human Motion Patterns Recognition based on RSS and Support Vector Machines. In Proceedings of the IEEE Wireless Communications and Networking Conference, Seoul, Korea, 25–28 May 2020. [Google Scholar]
- Meng, S.; Jin, S.; Li, J.; Hashimoto, K.; Guo, S.; Dai, S. The Analysis of Human Walking Stability Using ZMP in Sagittal Plane. In Proceedings of the IEEE International Conference on Cybernetics and Intelligent Systems, Ningbo, China, 19–21 November 2017; pp. 296–501. [Google Scholar]
- Available online: https://www.physio-pedia.com/Balance (accessed on 18 October 2020).
- Patterson, K.; Gage, W.; Brooks, D.; Black, S.E.; McIlroy, W.E. Evaluation of gait symmetry after stroke: A comparison of current methods and recommendations for standardization. Gait Posture 2010, 31, 241–246. [Google Scholar] [CrossRef] [PubMed]
- Sardian, P.; Bessonnet, G. Forces acting on a biped robot. Center of pressure-zero moment point. Trans. Syst. Man Cybern. Part A Syst. Hum. 2004, 34, 630–637. [Google Scholar] [CrossRef]
- Kajita, S.; Mastumoto, O.; Saigo, M. Real-time 3D Pattern Generation for a Biped Robot with Telescopic Legs. In Proceedings of the International Conference on Robotics & Automation, Seoul, Korea, 21–26 May 2001; pp. 2299–2306. [Google Scholar]
- Kajita, S.; Kanehiro, K.; Fujiwara, K.; Harada, K.; Yokoi, K.; Hirukawa, H. Biped Walking Pattern Generation by using Preview Control of Zero-Moment Point. In Proceedings of the International Conference on Robotics Automation, Taipei, Taiwan, 14–19 September 2003; pp. 1620–1626. [Google Scholar]
- Shourijeh, M.S.; McPhee, J. Foot-ground contact modelling within human gait simulations: From Kelvin-Voigt to hyper-volumetric model. Multibody Syst. Dyn. 2015, 35, 393–407. [Google Scholar] [CrossRef] [Green Version]
- Hunt, K.; Crossley, F. Coefficient of restitution interpreted as damping in vibroimpact. J. Appl. Mech. Trans. ASME 1975, 42, 440–445. [Google Scholar] [CrossRef]
- Available online: https://jp.mathworks.com/matlabcentral/fileexchange/64227-matlab-and-simulink-robotics-arena-walking-robot (accessed on 18 October 2020).
- Paul, J.P. Approaches to Design: Force actions transmitted by joints in the human body. Proc. R. Soc. Lond. Ser. B Boil. Sci. 1976, 192, 163–172. [Google Scholar]
- Lingyan, Z.; Shi, Z.; Lingtao, Y.; Zhiguang, G. Study on Stress Characteristics of Plantar Walking and Rehabilitation Strategy. In Proceedings of the IEEE ICCAR (International Conference on Control, Automation and Robotics), Singapore, 20–23 April 2020; pp. 553–557. [Google Scholar]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Murakami, T. An Approach to Human Walking Analysis Based on Balance, Symmetry and Stability Using COG, ZMP and CP. Appl. Sci. 2020, 10, 7307. https://doi.org/10.3390/app10207307
Kim S, Murakami T. An Approach to Human Walking Analysis Based on Balance, Symmetry and Stability Using COG, ZMP and CP. Applied Sciences. 2020; 10(20):7307. https://doi.org/10.3390/app10207307
Chicago/Turabian StyleKim, Seonghye, and Toshiyuki Murakami. 2020. "An Approach to Human Walking Analysis Based on Balance, Symmetry and Stability Using COG, ZMP and CP" Applied Sciences 10, no. 20: 7307. https://doi.org/10.3390/app10207307
APA StyleKim, S., & Murakami, T. (2020). An Approach to Human Walking Analysis Based on Balance, Symmetry and Stability Using COG, ZMP and CP. Applied Sciences, 10(20), 7307. https://doi.org/10.3390/app10207307