Combination of Group Method of Data Handling (GMDH) and Computational Fluid Dynamics (CFD) for Prediction of Velocity in Channel Intake
 ,
,  ,
, 
Abstract
:1. Introduction
2. Material and Methods
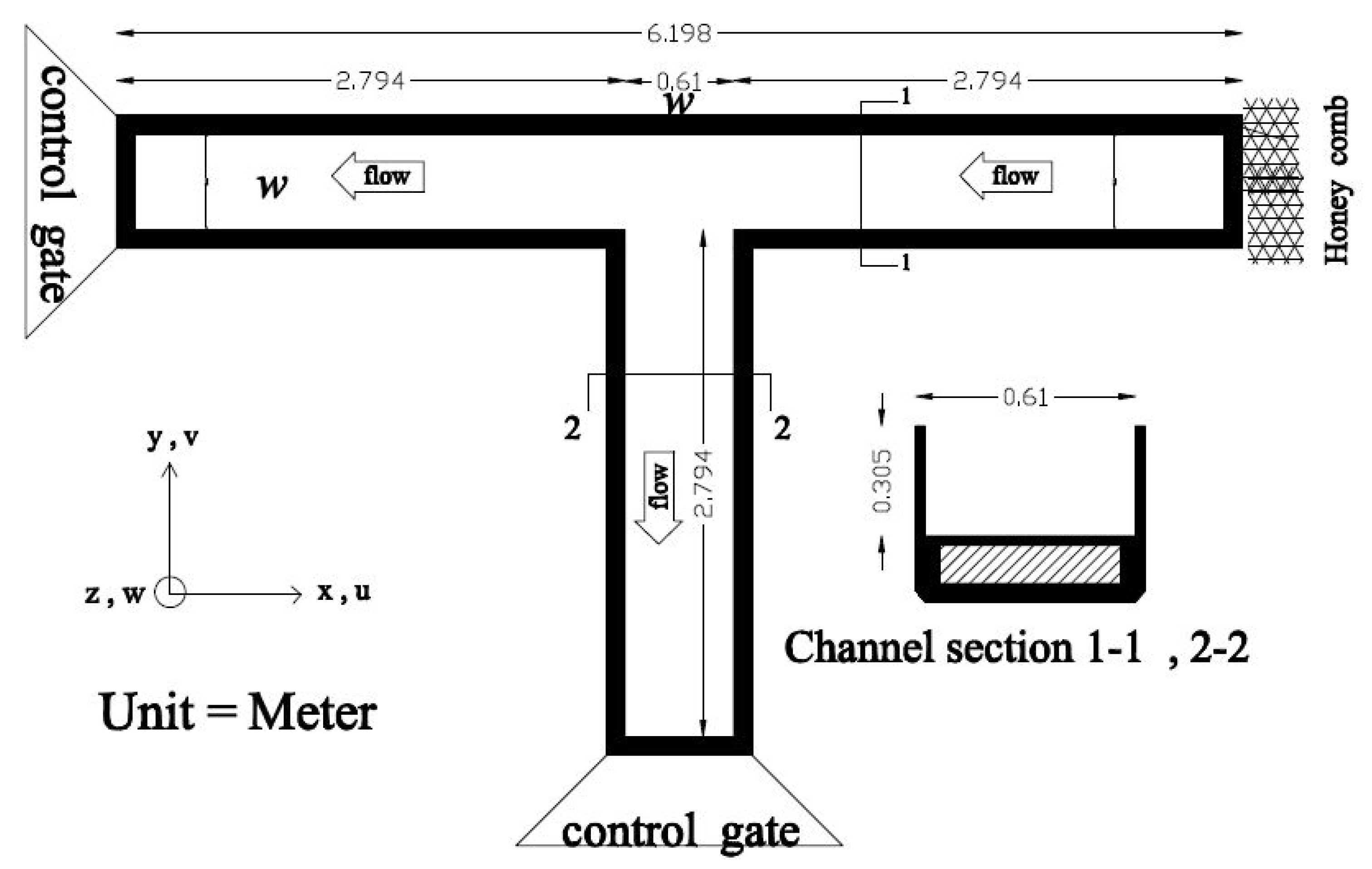
2.1. Experimental Model
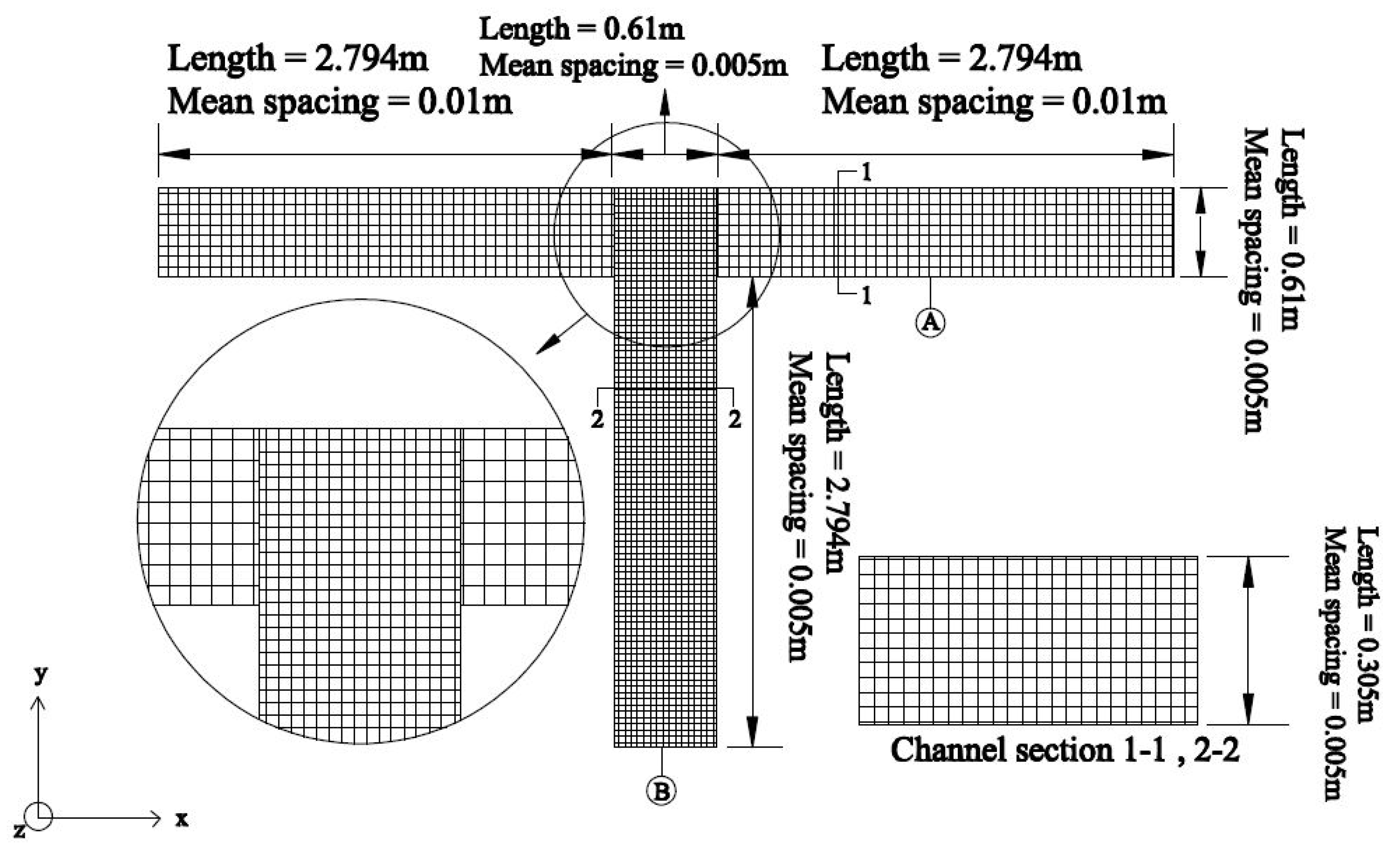
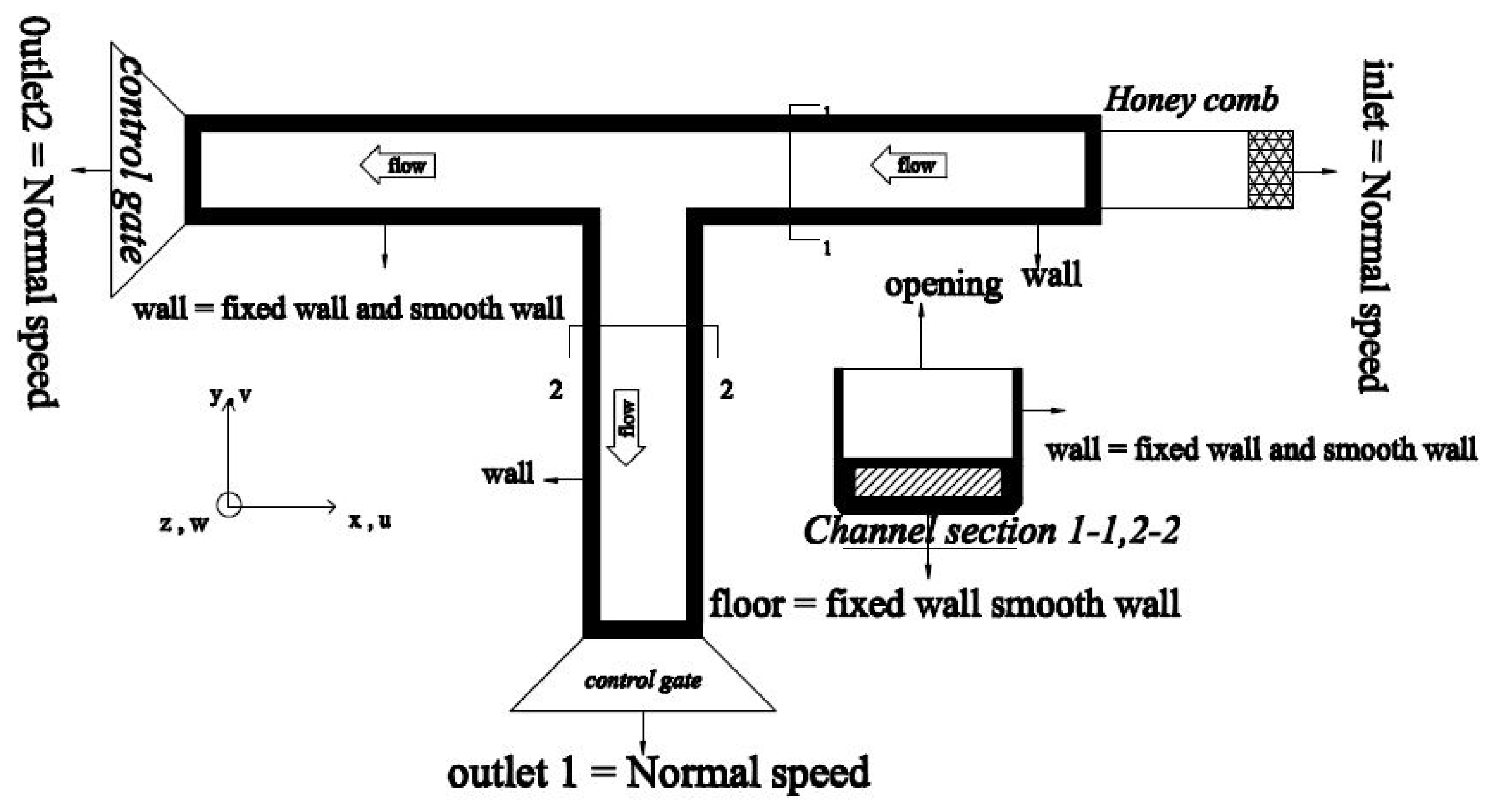
2.2. Simulating the Physical Model and the Flow Field
2.3. Overview of GMDH
3. Results and Discussion
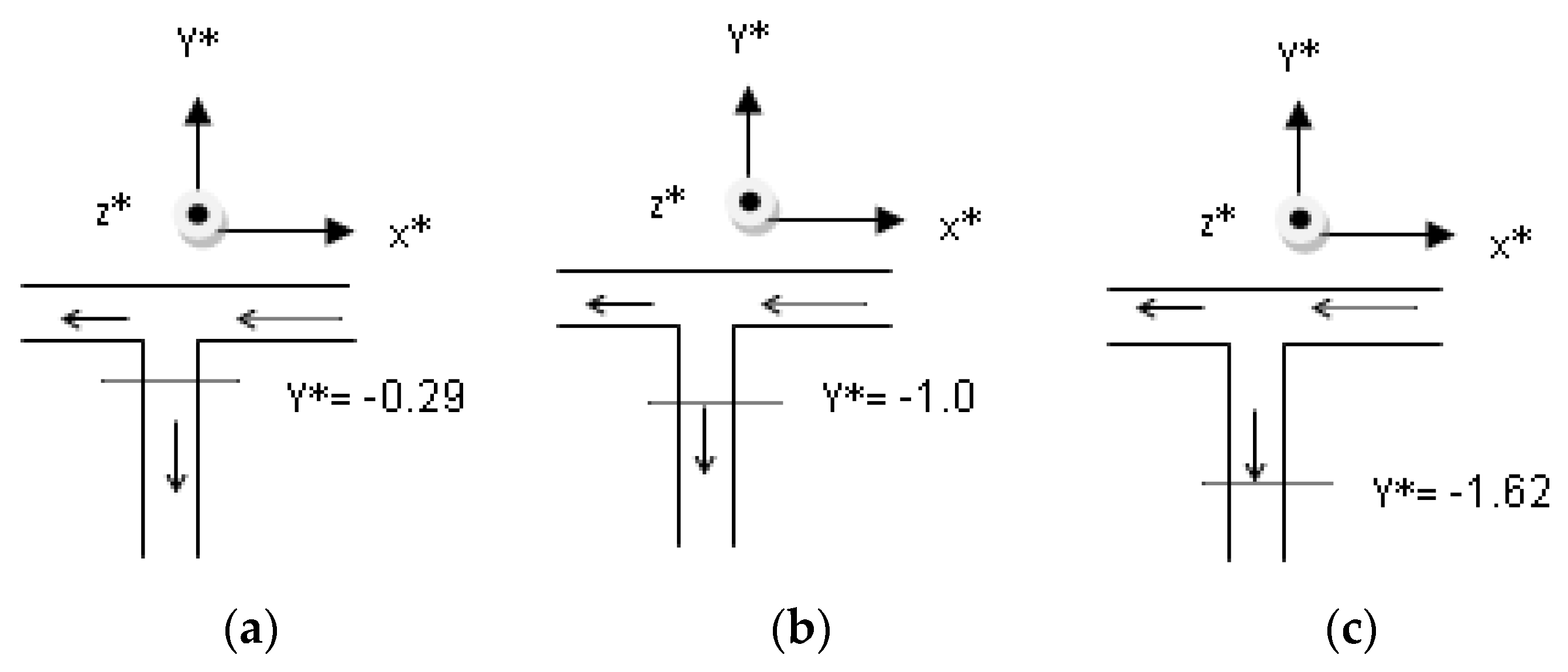
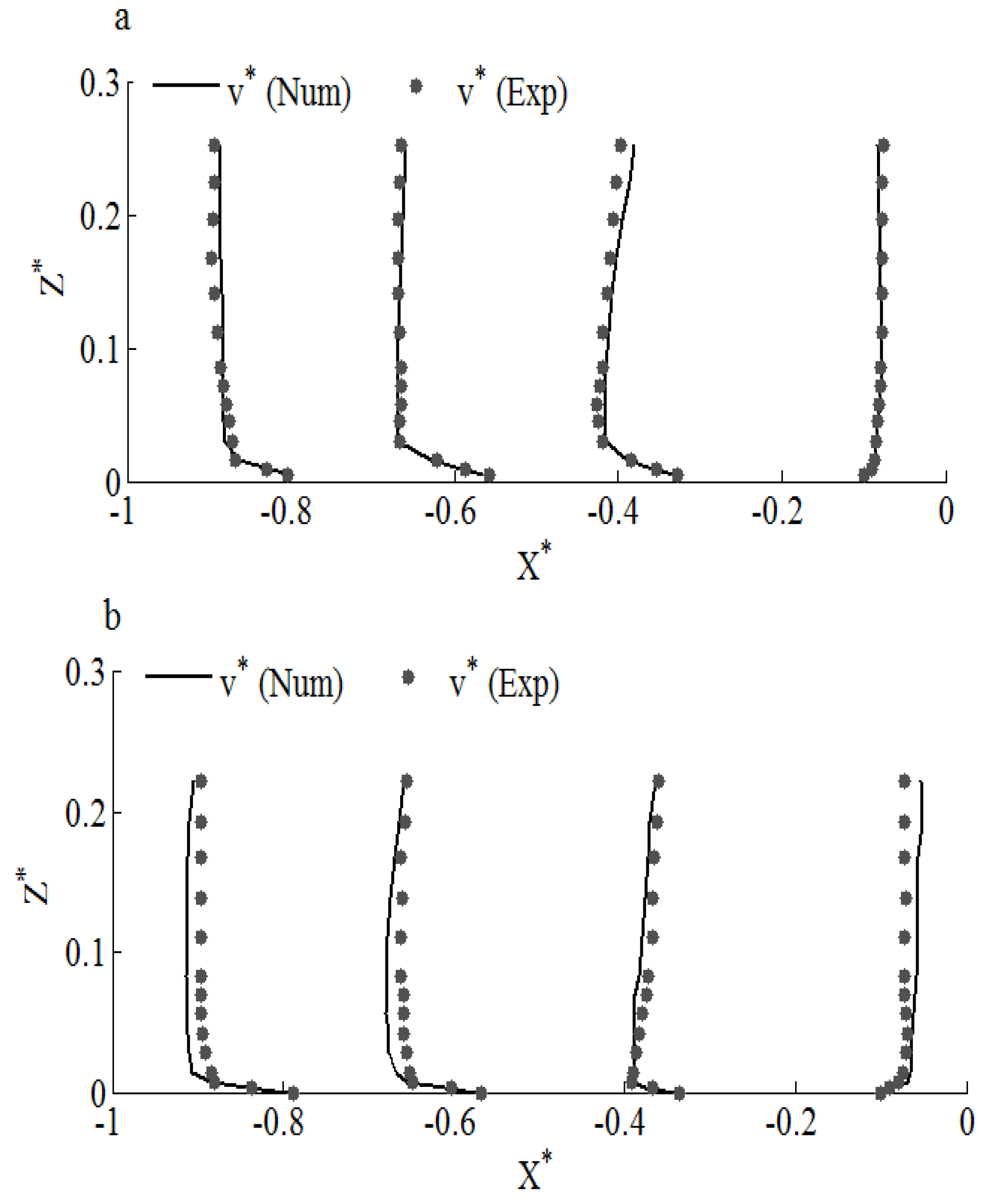
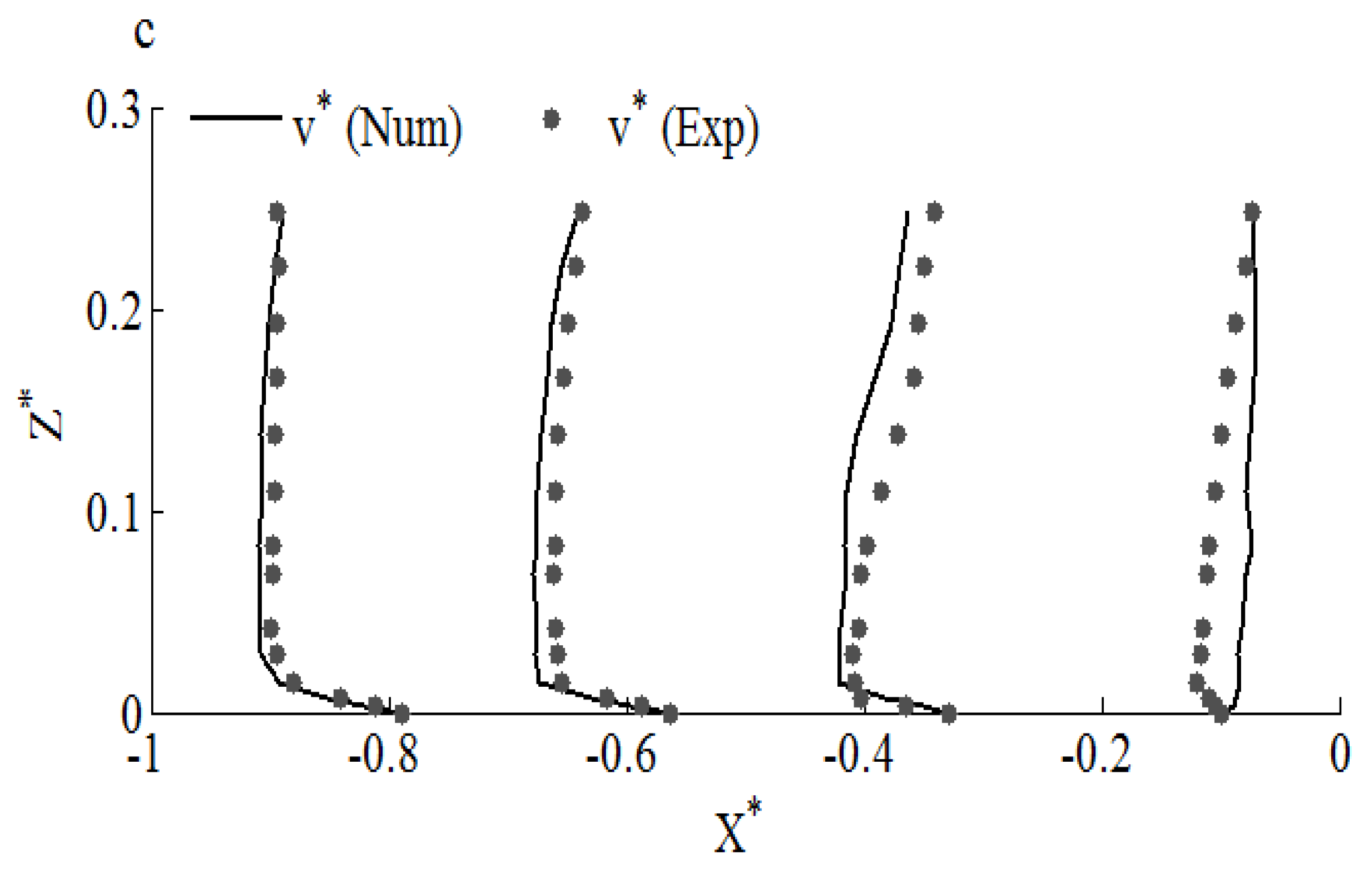
3.1. Verifying of CFX
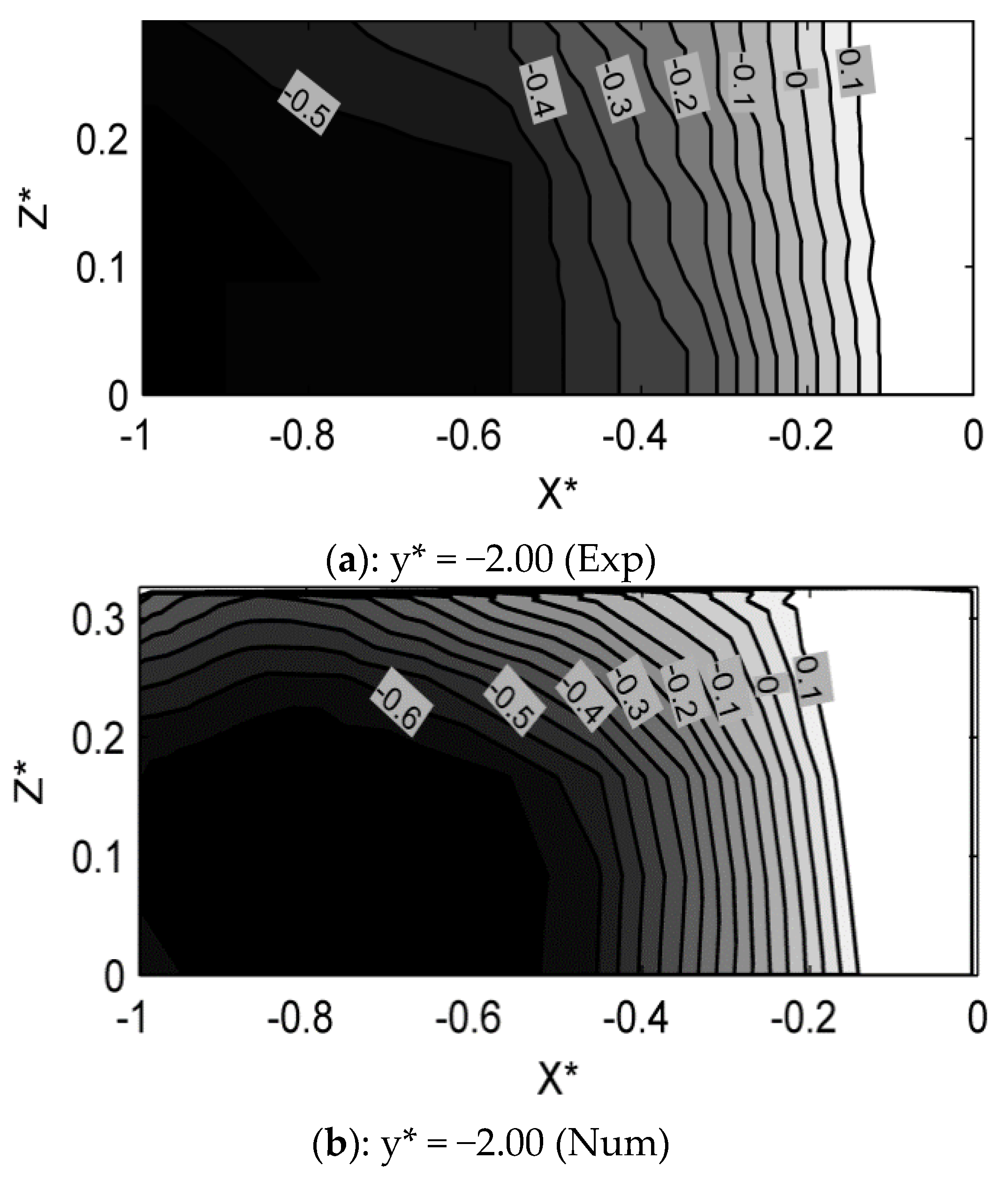
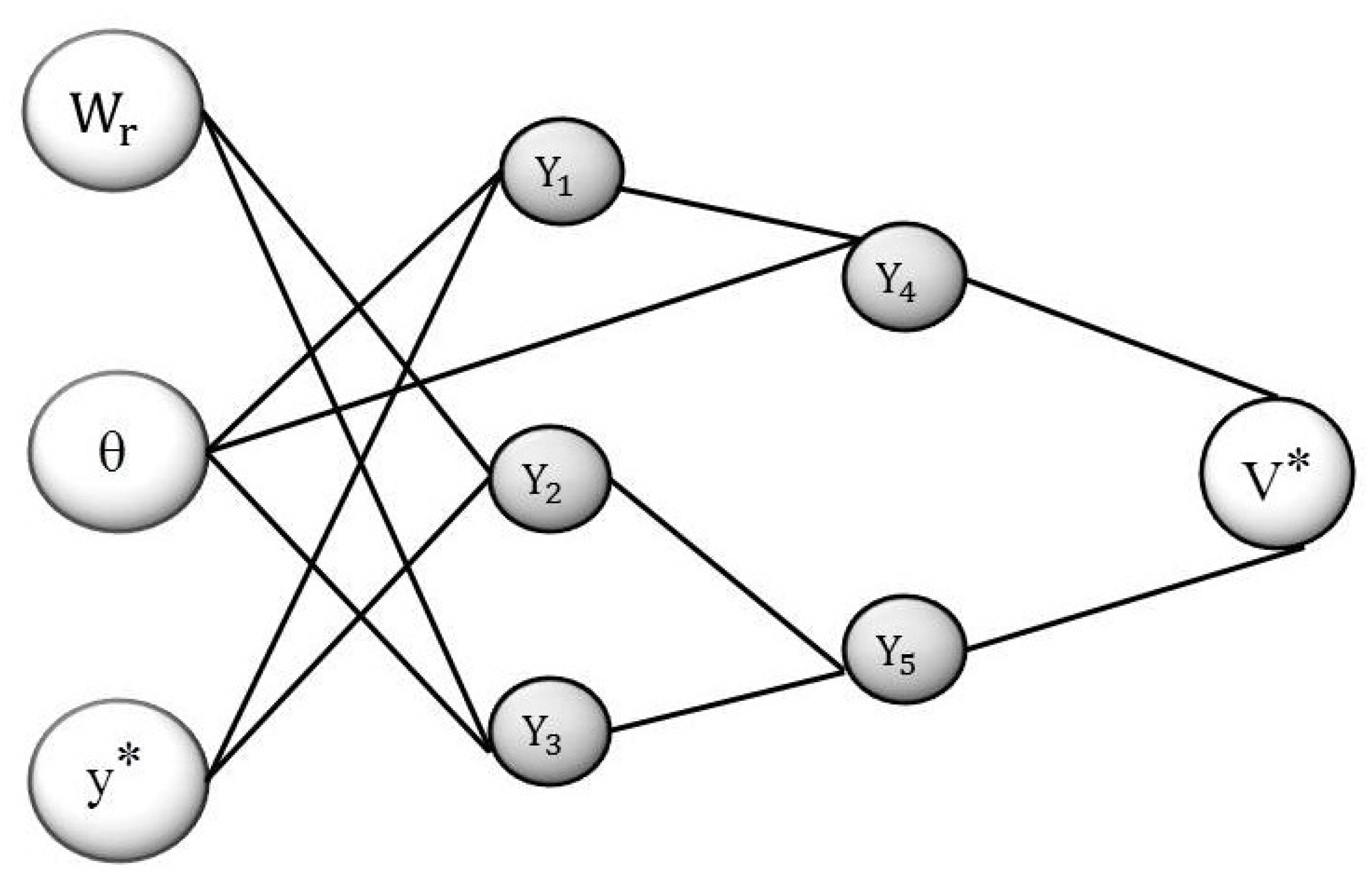
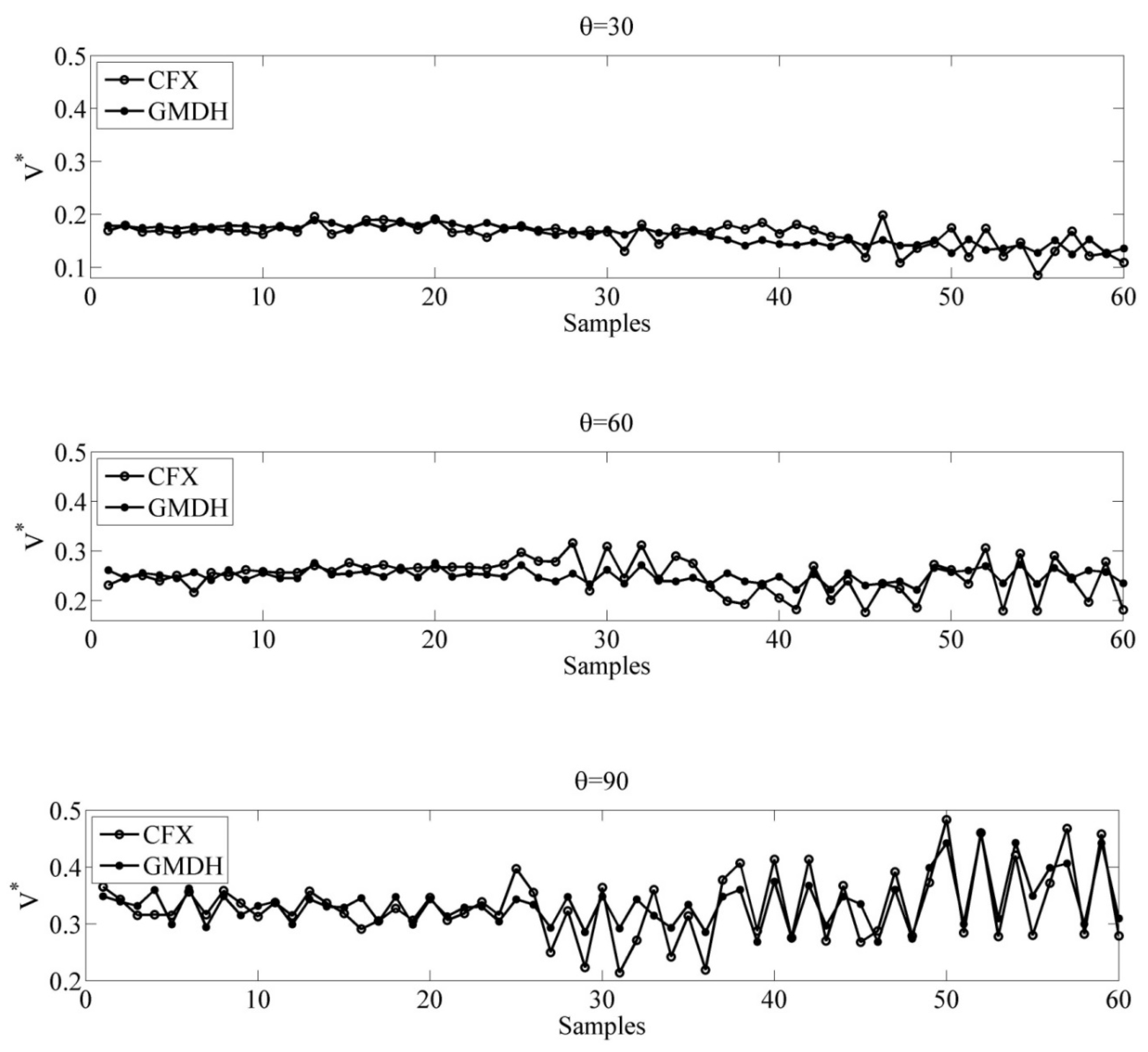
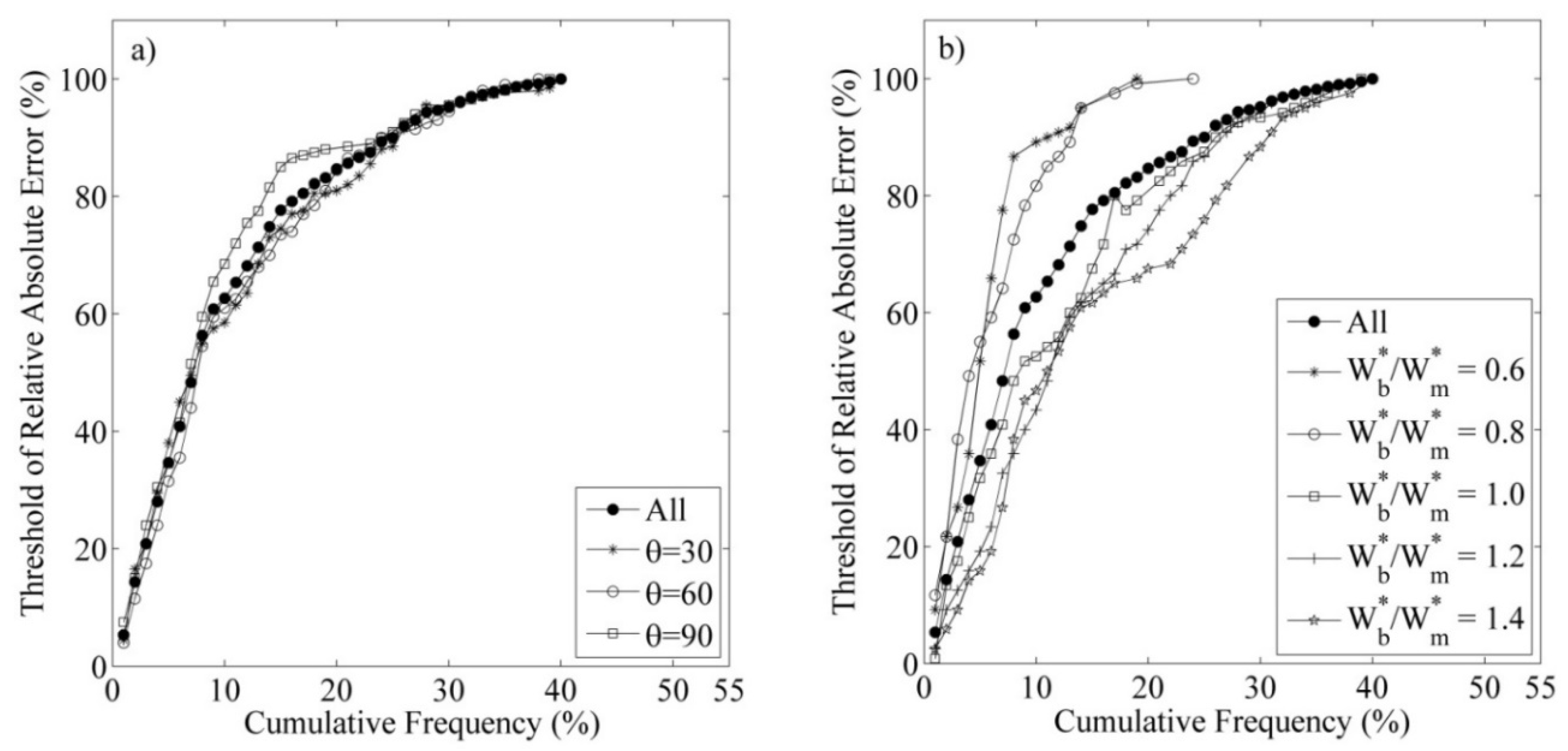
3.2. Derivation of Mean Velocity using GMDH
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Grace, J.L.; Priest, M.S. Division of Flow in Open Channel Junctions; Engineering Experiment Station, Alabama Polytechnic Institute, Auburn University: Auburn, AL, USA, 1958. [Google Scholar]
- Neary, V.S.; Odgaard, A.; Sotiropoulos, F. Three-dimensional numerical model of lateral-intake inflows. J. Hydraul. Eng. 1999, 125, 126–140. [Google Scholar] [CrossRef]
- Hager, W.H. Discussion of separation zone at Open-Channel Junctions. by James L. Best and Ian Reid. J. Hydraul. Eng. 1987, 113, 539–543. [Google Scholar] [CrossRef]
- Karimi, S.; Bonakdari, H.; Gholami, A. Determination Discharge Capacity of Triangular Labyrinth Side Weir using Multi-Layer Neural Network (ANN-MLP), Special Issue of Current World Environment 10 (Special Issue May 2015). 2015. Available online: http://www.cwejournal.org/?p=10430:111-119 (accessed on 3 August 2020).
- Law, S.W.; Reynolds, A.J. Dividing flow in an open channel. J. Hydraul. Div. 1966, 92, 4730–4736. [Google Scholar]
- Neary, V.S.; Odgaard, A.J. Three-dimensional flow structure at open channel diversions. J. Hydraul. Eng. 1993, 119, 1224–1230. [Google Scholar] [CrossRef]
- Karimi, S.; Bonakdari, H.; Ebtehaj, I.; Zaji, A.H. Prediction of Mean Velocity in Open Channel Intake Using Numerical Model and Gene Expression Programming. Mitt. Saechsischer Entomol. (MSE) 2016, 119, 599–616. [Google Scholar]
- Kasthuri, B.; Pundarikanthan, N.V. Discussion of “separation zone at open channel junction”. J. Hydraul. Eng. 1987, 113, 543–544. [Google Scholar] [CrossRef]
- Weber, L.J.; Schumate, E.D.; Mawer, N. Experiments on flow at a 90 open-channel junction. J. Hydraul. Eng. 2001, 127, 340–350. [Google Scholar] [CrossRef]
- Shamloo, H.; Pirzadeh, B. Numerical investigation of velocity field in dividing open-channel flow. In Proceedings of the 12th WSEAS International Conference on APPLIED MATHEMATICS 194–199, Cairo, Egypt, 29–31 December 2007. [Google Scholar]
- Bonakdari, H.; Baghalian, S.; Nazari, F.; Fazli, M. Numerical analysis and prediction of the velocity field in curved open channel using Artificial Neural Network and Genetic Algorithm. Eng. Appl. Comput. Fluid Mech. 2011, 5, 384–396. [Google Scholar] [CrossRef]
- Baghalian, S.; Bonakdari, H.; Nazari, F.; Fazli, M. Closed-form solution for flow field in curved channels in comparison with experimental and numerical analyses and Artificial Neural Network. Eng. Appl. Comput. Fluid Mec. 2012, 6, 514–526. [Google Scholar] [CrossRef]
- Mohamad, E.T.; Faradonbeh, R.S.; Armaghani, D.J.; Monjezi, M.; Abd Majid, M.Z. An optimized ANN model based on genetic algorithm for predicting ripping production. Neural Comput. Appl. 2017, 28, 393–406. [Google Scholar] [CrossRef]
- Shiri, J.; Dierickx, W.; Neamati, A.; Ghorbani, M.A. Estimating daily pan evaporation from climatic data of the State of Illinois, USA using adaptive neuro-fuzzy inference system (ANFIS) and artificial neural network (ANN). Hydrol. Res. 2011, 42, 491–502. [Google Scholar] [CrossRef]
- Ebtehaj, I.; Bonakdari, H. Performance Evaluation of Adaptive Neural Fuzzy Inference System for Sediment Transport in Sewers. Water Resour. Manag. 2014, 28, 4765–4779. [Google Scholar] [CrossRef]
- Ebtehaj, I.; Bonakdari, H. Bed load sediment transport estimation in a clean pipe using multilayer perceptron with different training algorithms. KSCE J. Civ. Eng. 2016, 20, 581–589. [Google Scholar] [CrossRef]
- Bonakdari, H.; Ebtehaj, I. Comparison of two data-driven approaches in estimation of sediment transport in sewer pipe. In Proceedings of the 36th IAHR World Congress, The Hague, The Netherlands, 28 June–3 July 2015. [Google Scholar]
- Ebtehaj, I.; Bonakdari, H. Comparison of genetic algorithm and imperialist competitive algorithms in predicting bed load transport in clean pipe. Water Sci. Technol. 2014, 70, 1695–1701. [Google Scholar] [CrossRef] [PubMed]
- Basser, H.; Karami, H.; Shamshirband, S.; Akib, S.; Amirmojahedi, M.; Ahmad, R. Hybrid ANFIS–PSO approach for predicting optimum parameters of a protective spur dike. Appl. Soft Comput. 2015, 30, 642–649. [Google Scholar] [CrossRef]
- Najafzadeh, M.; Barani, G.H.A.; Azamathulla, H.M.D. GMDH to Predict Scour Depth around Vertical Piers in Cohesive Soils. Appl. Ocean Res. 2013, 40, 35–41. [Google Scholar] [CrossRef]
- Akbarizadeh, M.; Daghbandan, A.; Yaghoob, Y.I. Modeling and Optimization of Poly Electrolyte Dosage in Water Treatment Process by GMDH Type-NN and MOGA. Int. J. Chemoinformatics Chem. Eng. (IJCCE) 2013, 3, 94–106. [Google Scholar] [CrossRef] [Green Version]
- Sheikholeslami, M.; Sheykholeslami, F.B.; Khoshhal, S.; Mola-Abasia, H.; Ganji, D.D.; Rokni, H.B. Effect of magnetic field on Cu–water nanofluid heat transfer using GMDH-type neural network. Neural Comput. Appl. 2014, 25, 171–178. [Google Scholar] [CrossRef]
- Atashrouz, S.; Pazuki, G.; Alimoradi, Y. Estimation of the viscosity of nine nanofluids using a hybrid GMDH-type neural network system. Fluid Phase Equilibria 2014, 372, 43–48. [Google Scholar] [CrossRef]
- Ayoub, M.A.; Negash, B.M.; Saaid, I.M. Modeling Pressure Drop in Vertical Wells Using Group Method of Data Handling (GMDH) Approach; Springer: Singapore, 2015; pp. 69–78. [Google Scholar]
- Ramamurthy, A.; Qu, J.; Vo, D. Numerical and experimental study of dividing open-channel flows. J. Hydraul. Eng. 2007, 133, 1135–1144. [Google Scholar] [CrossRef]
- Mignot, E.; Bonakdari, H.; Knothe, P.; LipemeKouyi, G.; Bessette, A.; Rivière, N.; Bertrand-Krajewski, J.L. Experiments and 3D simulations of flow structures in junctions and their influence on location of flowmeters. Water Sci. Technol. 2012, 66, 1325–1332. [Google Scholar] [CrossRef] [PubMed]
- Najafzadeh, M.; Lim, S.Y. Application of improved neuro-fuzzy GMDH to predict scour depth at sluice gates. Earth Sci. Inf. 2015, 8, 187–196. [Google Scholar] [CrossRef]
- Wilcox, D.C. Turbulence Modeling for CFD, 2nd ed.; Industries, Inc: La Canada Flintridge, CA, USA, 2000. [Google Scholar]
- Ebtehaj, I.; Bonakdari, H.; Khoshbin, F.; Azimi, H. Pareto genetic design of group method of data handling type neural network for prediction discharge coefficient in rectangular side orifices. Flow Meas. Instrum. 2015, 41, 67–74. [Google Scholar] [CrossRef]
- Bagheri-Esfe, H.; Safikhani, H. Modeling of deviation angle and performance losses in wet steam turbines using GMDH-type neural networks. Neural Comput. Appl. 2017, 28, 489–501. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| y* = −0.29 | y* = −1.0 | y* = −1.62 | |
|---|---|---|---|
| RMSE | 0.01 | 0.012 | 0.017 |
| MAPE (%) | 2.0 | 5.2 | 6.95 |
| R2 | 0.95 | 0.88 | 0.68 |
| SI | 0.025 | 0.061 | 0.082 |
| Train | Wr | θ | R2 | MAPE | RMSE | SI |
|---|---|---|---|---|---|---|
| 0.6 | 30 | 0.50 | 4.35 | 0.01 | 0.05 | |
| 60 | 0.60 | 6.80 | 0.02 | 0.08 | ||
| 90 | 0.48 | 5.72 | 0.02 | 0.07 | ||
| 0.8 | 30 | 0.54 | 8.31 | 0.02 | 0.11 | |
| 60 | 0.24 | 5.24 | 0.02 | 0.06 | ||
| 90 | 0.59 | 4.94 | 0.02 | 0.07 | ||
| 1.0 | 30 | 0.43 | 8.79 | 0.02 | 0.10 | |
| 60 | 0.85 | 10.63 | 0.04 | 0.14 | ||
| 90 | 0.73 | 16.57 | 0.05 | 0.17 | ||
| 1.2 | 30 | 0.65 | 13.94 | 0.03 | 0.18 | |
| 60 | 0.60 | 16.04 | 0.04 | 0.17 | ||
| 90 | 0.85 | 9.96 | 0.04 | 0.11 | ||
| 1.4 | 30 | 0.24 | 18.58 | 0.03 | 0.23 | |
| 60 | 0.66 | 16.86 | 0.04 | 0.17 | ||
| 90 | 0.90 | 9.84 | 0.04 | 0.11 | ||
| All | 0.86 | 10.44 | 0.03 | 0.12 | ||
| Test | 0.6 | 30 | 0.54 | 4.18 | 0.01 | 0.05 |
| 60 | 0.57 | 5.78 | 0.02 | 0.07 | ||
| 90 | 0.60 | 4.84 | 0.02 | 0.06 | ||
| 0.8 | 30 | 0.29 | 5.40 | 0.01 | 0.07 | |
| 60 | 0.10 | 5.10 | 0.02 | 0.06 | ||
| 90 | 0.48 | 4.07 | 0.02 | 0.06 | ||
| 1.0 | 30 | 0.33 | 6.51 | 0.01 | 0.08 | |
| 60 | 0.80 | 10.42 | 0.04 | 0.13 | ||
| 90 | 0.81 | 17.51 | 0.05 | 0.17 | ||
| 1.2 | 30 | 0.59 | 15.66 | 0.03 | 0.17 | |
| 60 | 0.57 | 14.60 | 0.03 | 0.16 | ||
| 90 | 0.87 | 8.69 | 0.03 | 0.10 | ||
| 1.4 | 30 | 0.19 | 19.98 | 0.03 | 0.23 | |
| 60 | 0.85 | 14.42 | 0.04 | 0.15 | ||
| 90 | 0.93 | 8.63 | 0.04 | 0.10 | ||
| All | 0.88 | 9.72 | 0.03 | 0.11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Band, S.S.; Al-Shourbaji, I.; Karami, H.; Karimi, S.; Esfandiari, J.; Mosavi, A. Combination of Group Method of Data Handling (GMDH) and Computational Fluid Dynamics (CFD) for Prediction of Velocity in Channel Intake. Appl. Sci. 2020, 10, 7521. https://doi.org/10.3390/app10217521
Band SS, Al-Shourbaji I, Karami H, Karimi S, Esfandiari J, Mosavi A. Combination of Group Method of Data Handling (GMDH) and Computational Fluid Dynamics (CFD) for Prediction of Velocity in Channel Intake. Applied Sciences. 2020; 10(21):7521. https://doi.org/10.3390/app10217521
Chicago/Turabian StyleBand, Shahab S., Ibrahim Al-Shourbaji, Hojat Karami, Sohrab Karimi, Javad Esfandiari, and Amir Mosavi. 2020. "Combination of Group Method of Data Handling (GMDH) and Computational Fluid Dynamics (CFD) for Prediction of Velocity in Channel Intake" Applied Sciences 10, no. 21: 7521. https://doi.org/10.3390/app10217521
APA StyleBand, S. S., Al-Shourbaji, I., Karami, H., Karimi, S., Esfandiari, J., & Mosavi, A. (2020). Combination of Group Method of Data Handling (GMDH) and Computational Fluid Dynamics (CFD) for Prediction of Velocity in Channel Intake. Applied Sciences, 10(21), 7521. https://doi.org/10.3390/app10217521