Novel Thermal Management Strategy for Improved Inverter Reliability in Electric Vehicles

 , , ,
, , ,
Abstract
:Featured Application
Abstract
1. Introduction
- (i)
- Both HSEM and in-wheel multi-pole direct drive solutions lead to high electrical stator frequencies. These trends exhibit regulation issues to be addressed [13,18,19], which can be overcome by introducing power electronics technologies that can operate at high switching frequencies with reasonable power losses [20].
- (ii)
- Cost reduction trends consider sharing the high temperature cooling loop of the electric machine (at 105 C) with power electronics [21,22], or also using air cooling technologies that adopt convenient power converter placement to take advantage of circulating air during EV motion [23]. Thus, the utilization of power semiconductor technologies that can withstand higher junction temperatures is required [20].
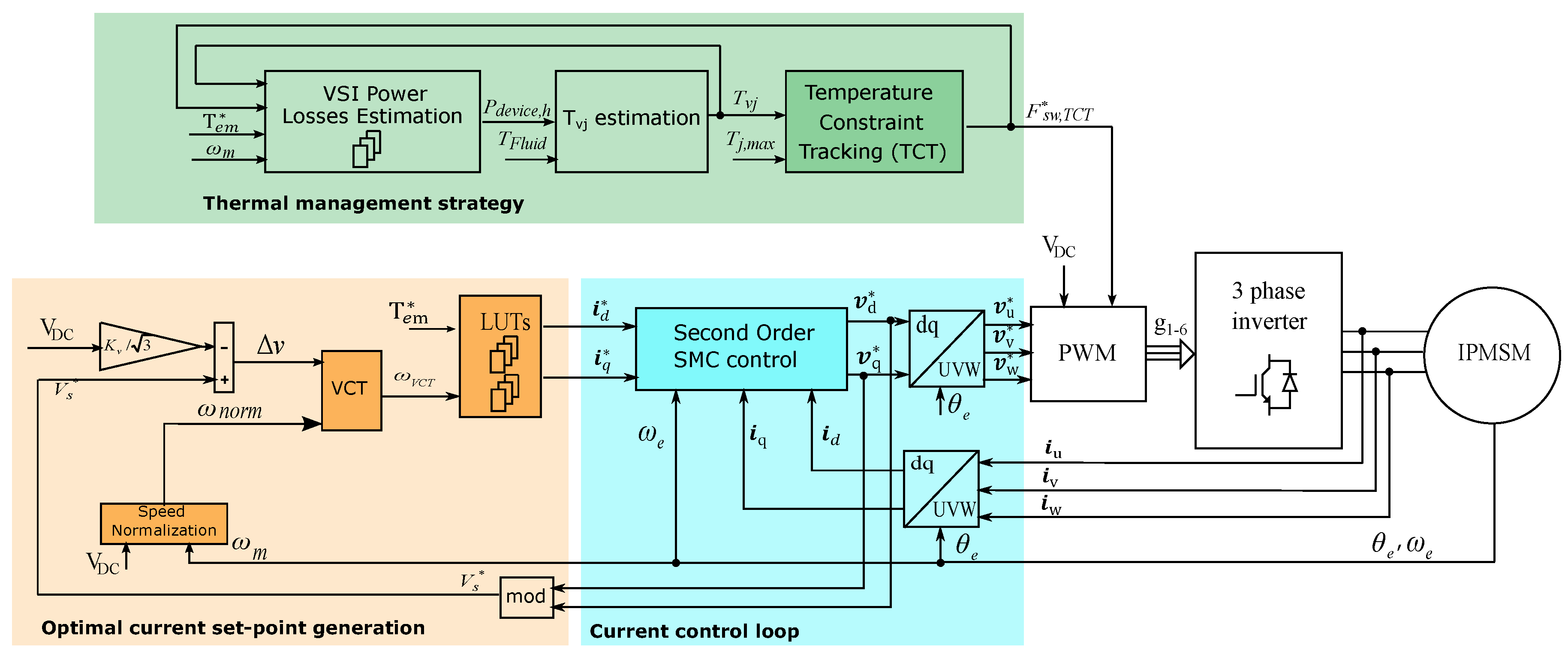
2. Torque Regulation of the IPMSM
3. Proposed Thermal Management Strategy
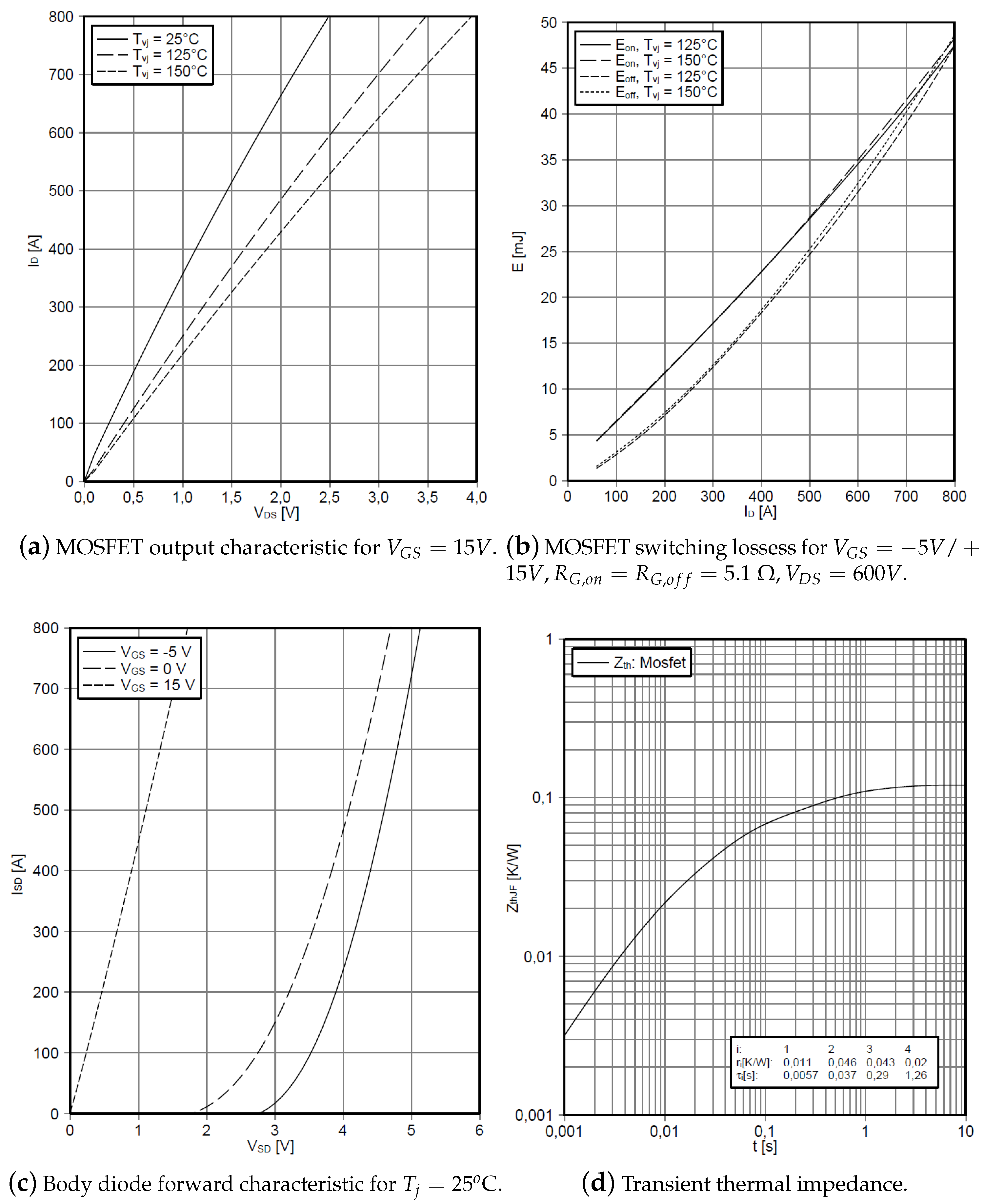
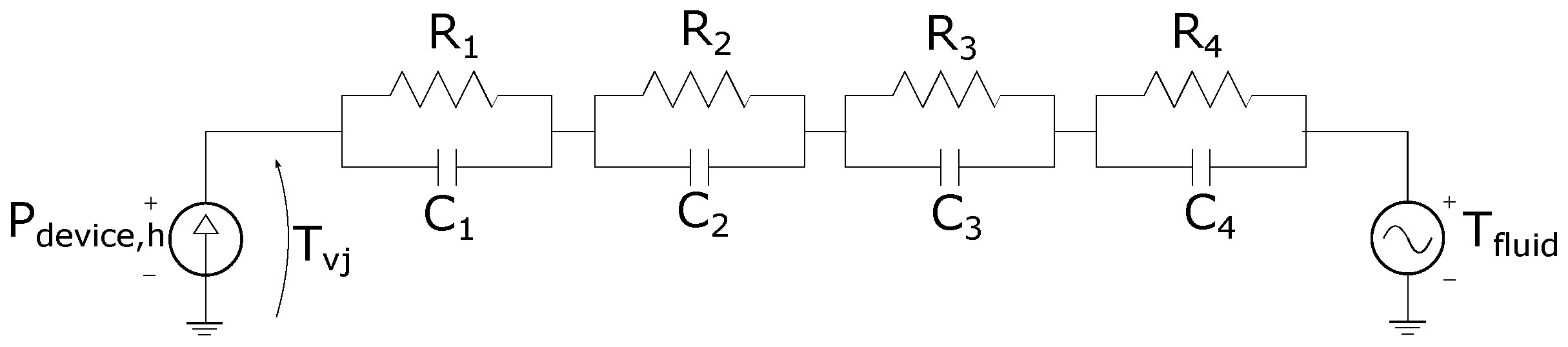
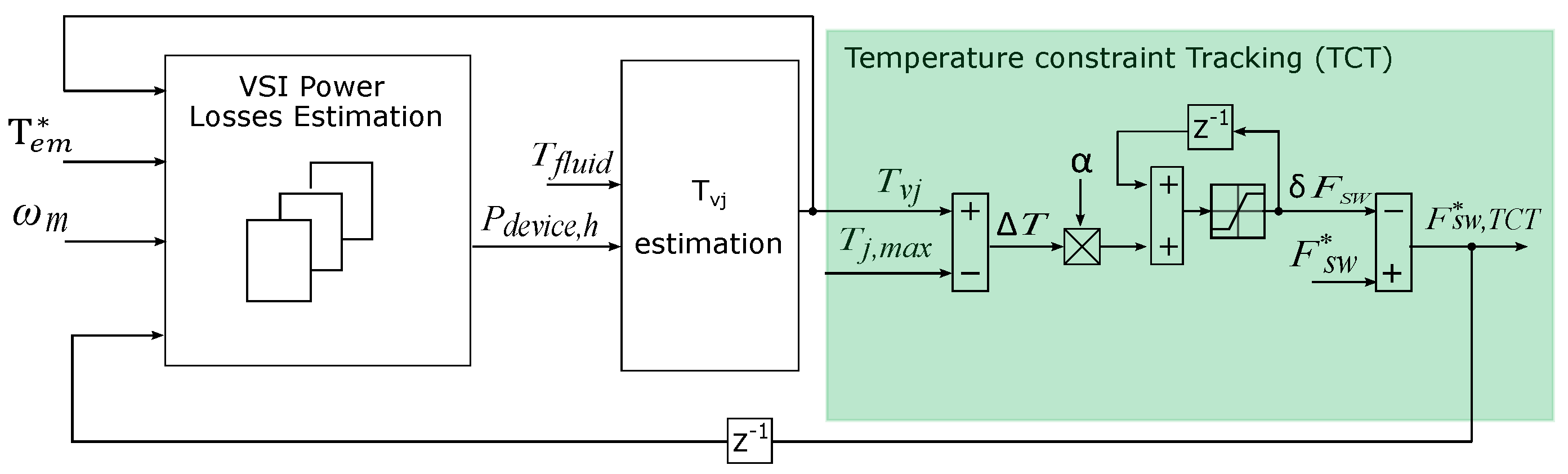
3.1. Power Loss and Highest Virtual Junction Temperature Estimation
- If reliable estimation of semiconductor through temperature measurement sensors (thermistor, NTC or PTC) soldered on the Direct Bonded Copper (DBC) substrate of the power module is possible [36], the highest of all the estimated temperatures is provided to the TCT algorithm for its regulation. (As temperature sensors are placed at a given distance to the semiconductor die, it provides a lower temperature than . To obtain accurate results, such a measurement point can be treated as a node within a simplified Foster thermal network to compensate the temperature underestimation (which is not straightforward) or, for simplicity, a security margin can be considered instead [36].)
- If the previous is not possible, temperature should be estimated by using accurate thermal and power loss models in conjunction with an external temperature sensor (measuring heatsink or coolant temperature) [36]. This approach has been proven successful in [27,30], as estimated and measured temperatures matched very well. In such works, power losses of all semiconductors were estimated online.
3.2. Temperature Constraint Tracking Algorithm
4. Validation of the Proposed Thermal Management Algorithm
4.1. Simulation Platform Description
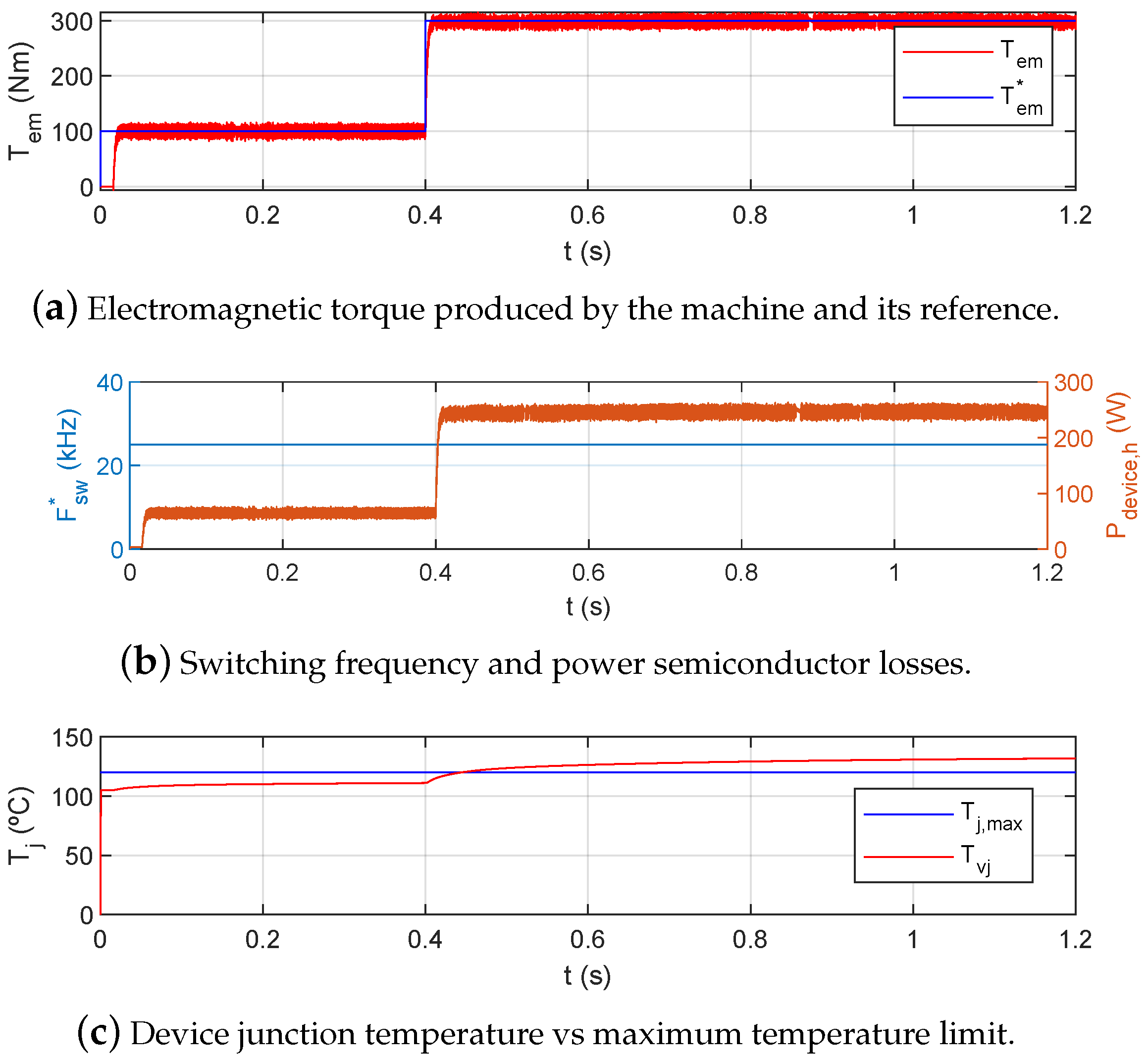
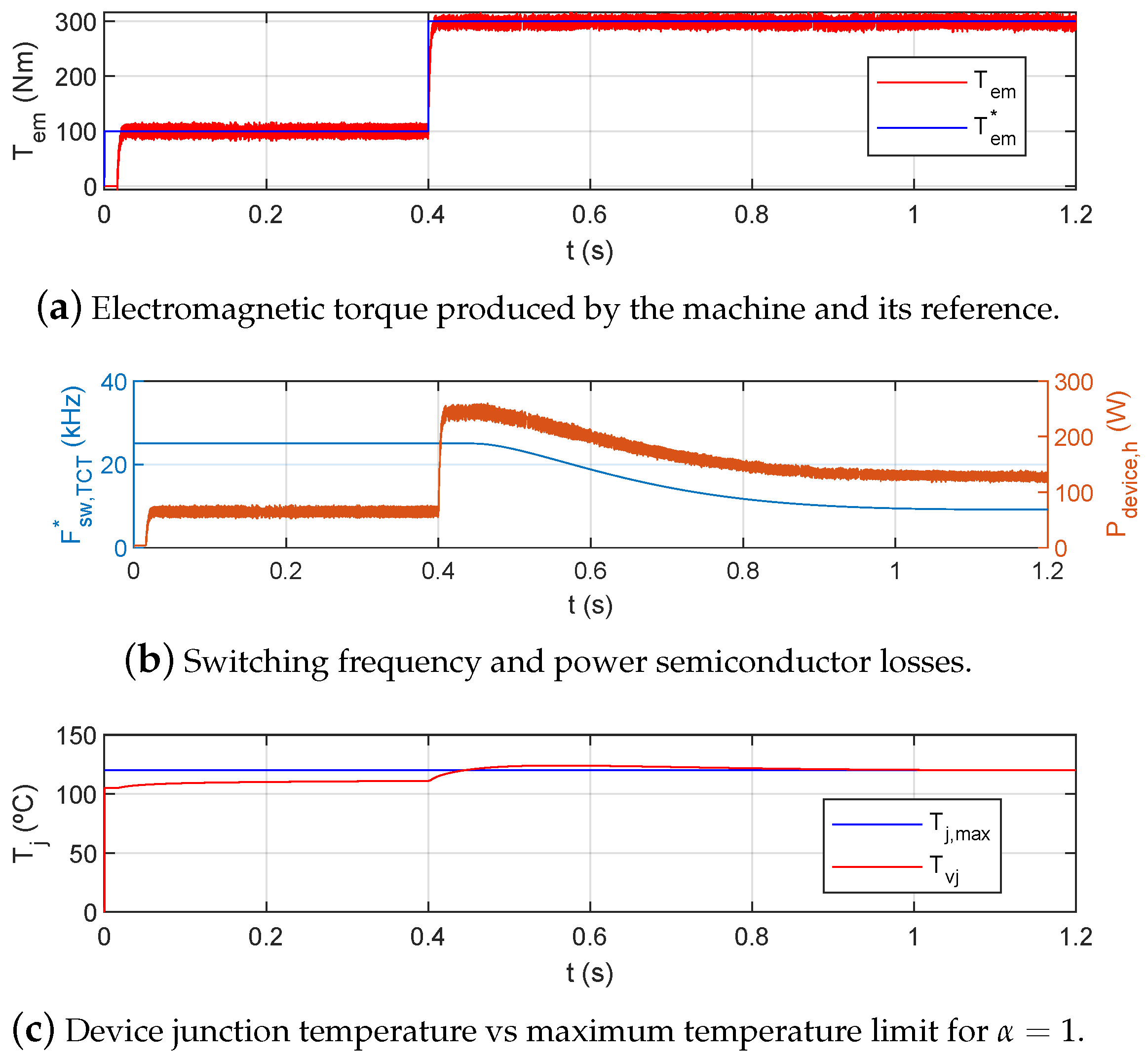
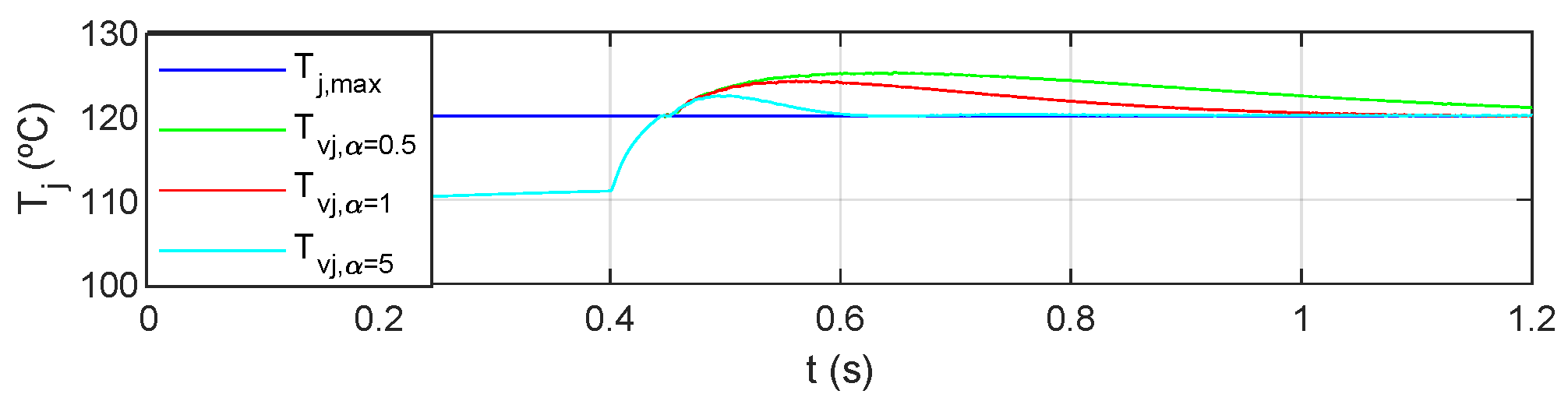
4.2. Low Speed and High Torque Operation Results
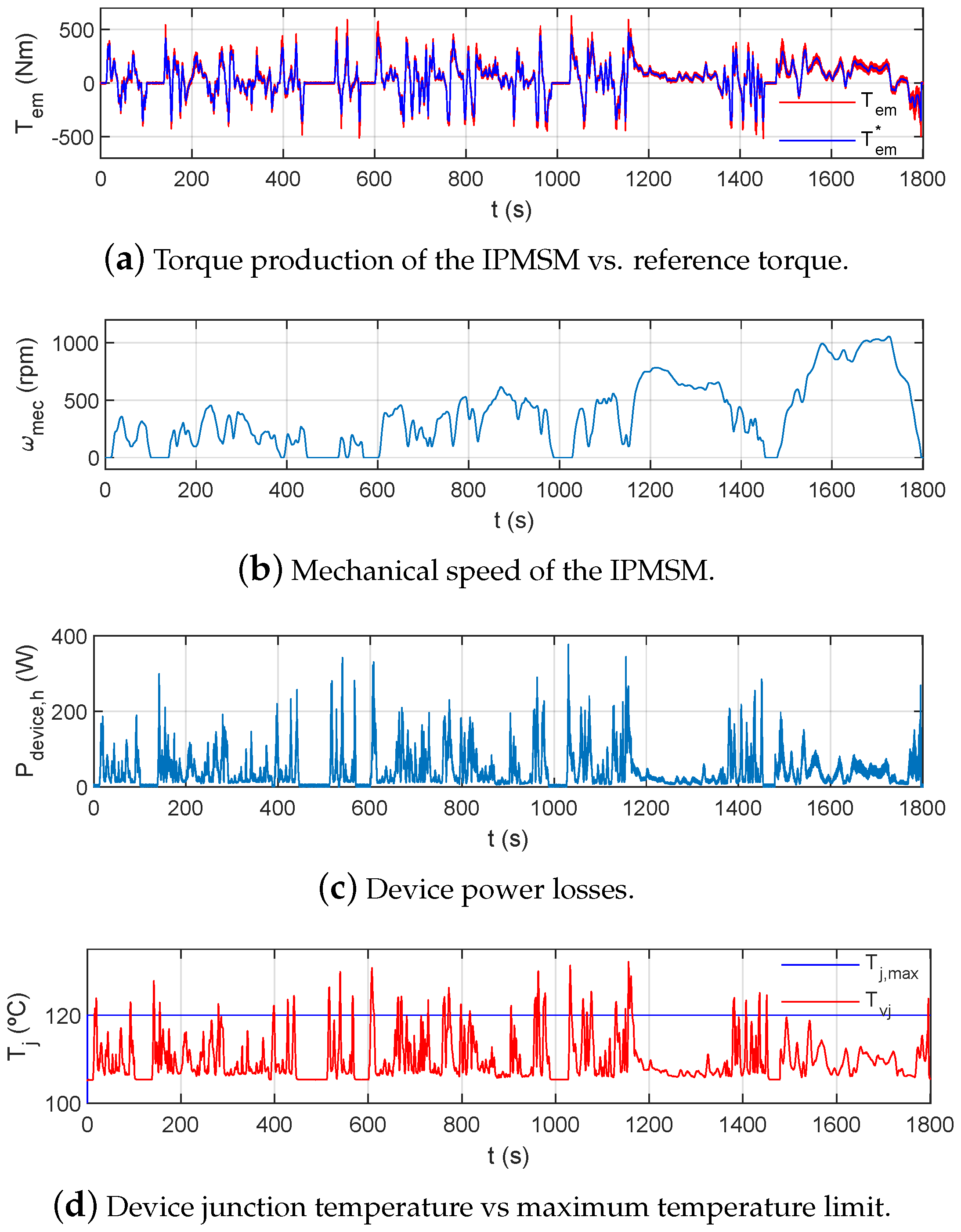
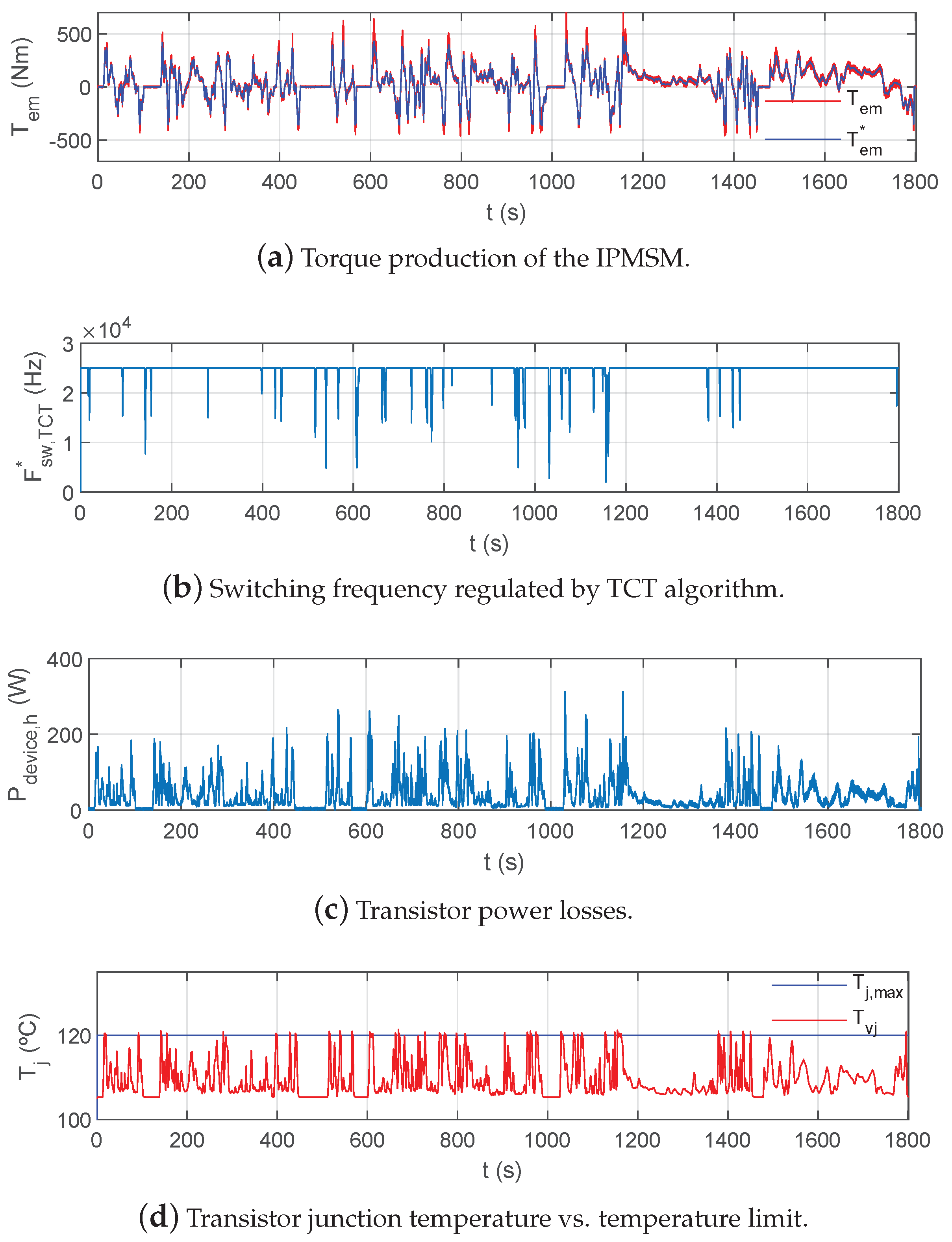
4.3. Validation under Standardized WLTP Driving Cycle
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Mathematical Model of the Vehicle
References
- Grelier, F. CO2 Emissions Form Cars: The Facts; Technical Report; European Federation for Transport and Environment, AISBL: Brussels, Belgium, 2018. [Google Scholar]
- Ivanova, D.; Barrett, J.; Wiedenhofer, D.; Macura, B.; Callagham, M.; Creutzig, F. Quantifying the potential for climate change mitigation of consumption options. Environ. Res. Lett. 2020. [Google Scholar] [CrossRef]
- Kawamoto, R.; Mochizuki, H.; Moriguchi, Y.; Nakano, T.; Motohashi, M.; Sakai, Y.; Inaba, A. Estimation of CO2 emissions of internal combustion engine vehicle and battery electric vehicle using LCA. Sustainability 2019, 11, 2690. [Google Scholar] [CrossRef] [Green Version]
- Kumar, L.; Jain, S. Electric Propulsion System for Electric Vehicular Technology: A Review. Renew. Sustain. Energy Rev. 2014, 29, 924–940. [Google Scholar] [CrossRef]
- Wang, H.; Li, C.; Zhang, G.; Geng, Q.; Shi, T. Maximum Torque Per Ampere (MTPA) Control of IPMSM Systems Based on Controller Parameters Self-Modification. IEEE Trans. Veh. Technol. 2020, 69, 2613–2620. [Google Scholar] [CrossRef]
- Lu, J.; Hu, Y.; Chen, G.; Wang, Z.; Liu, J. Mutual Calibration of Multiple Current Sensors With Accuracy Uncertainties in IPMSM Drives for Electric Vehicles. IEEE Trans. Ind. Electron. 2020, 67, 69–79. [Google Scholar] [CrossRef]
- Hwang, Y.; Jang, J.; Lee, S. A Flux-Controllable NI HTS Flux-Switching Machine for Electric Vehicle Applications. Appl. Sci. 2020, 10, 1564. [Google Scholar] [CrossRef] [Green Version]
- Ginzarly, R.; Hoblos, G.; Moubayed, N. From Modeling to Failure Prognosis of Permanent Magnet Synchronous Machine. Appl. Sci. 2020, 10, 691. [Google Scholar] [CrossRef] [Green Version]
- He, S.; Li, Y.; Zhou, G.; Gai, J.; Hu, Y.; Li, Y.; Zhang, Y.; Chen, Y.; Lou, D.; Feng, Y.; et al. Digital Collaborative Development of a High Reliable Auxiliary Electric Drive System for eTransportation: From Dual Three-Phase PMSM to Control Algorithm. IEEE Access 2020, 8, 178755–178769. [Google Scholar] [CrossRef]
- Hu, Y.; Huang, K.; Li, X.; Luo, D.; Huang, S.; Ma, X. Torque enhancement of dual three-phase PMSM by harmonic injection. IET Electr. Power Appl. 2020, 14, 1735–1744. [Google Scholar] [CrossRef]
- Damiano, A.; Floris, A.; Fois, G.; Marongiu, I.; Porru, M.; Serpi, A. Design of a high-speed ferrite-based brushless DC machine for electric vehicles. IEEE Trans. Ind. Appl. 2017, 53, 4279–4287. [Google Scholar] [CrossRef]
- Fodorean, D.; Idoumghar, L.; Brevilliers, M.; Minciunescu, P.; Irima, C. Hybrid differential evolution algorithm employed for the optimum design of a high-speed PMSM used for EV propulsion. IEEE Trans. Ind. Electron. 2017, 64, 9824–9833. [Google Scholar] [CrossRef]
- Arias, A.; Ibarra, E.; Trancho, E.; Griñó, R.; Kortabarria, I.; Caum, J. Comprehensive high speed automotive SM-PMSM torque control stability analysis including novel control approach. Int. J. Electr. Power Energy Syst. 2019, 109, 423–433. [Google Scholar] [CrossRef]
- Dhulipati, H.; Ghosh, E.; Mukundan, S.; Korta, P.; Tjong, J.; Kar, N. Advanced Design Optimization Technique for Torque Profile Improvement in Six-Phase PMSM Using Supervised Machine Learning for Direct-Drive EV. IEEE Trans. Energy Convers. 2019, 34, 2041–2051. [Google Scholar] [CrossRef]
- Ma, C.; Gao, Y.; Degano, M.; Wang, Y.; Fang, J.; Gerada, C.; Zhou, S.; Mu, Y. Eccentric position diagnosis of static eccentricity fault of external rotor permanent magnet synchronous motor as an in-wheel motor. IET Electr. Power Appl. 2020, 14, 2263–2272. [Google Scholar] [CrossRef]
- Bittner, R.; Bulovic, S.; Kujath, M.; Becker, N.; Butow, S.; Burani, N. 110 kW, 2.6 l SiC-inverter for DRIVEMODE—A highly integrated automotive drivetrain. In Proceedings of the PCIM Europe Conference, Nuremberg, Germany, 7–8 July 2020; pp. 1742–1746. [Google Scholar]
- Allca-Pekarovic, A.; Kollmeyer, P.; Mahvelatishamsabadi, P.; Mirfakhrai, T.; Naghshtabriz, P.; Emadi, A. Comparison of IGBT and SiC Inverter Loss for 400V and 800V DC Bus Electric Vehicle Drivetrains. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 6338–6344. [Google Scholar]
- Sepulchre, L.; Fadel, M.; Pietrzak-David, M. Improvement of the digital control of a high speed PMSM for vehicle application. In Proceedings of the Ecological Vehicles and Renewable Energies (EVER) Conference, Monte Carlo, Monaco, 6–8 April 2016. [Google Scholar]
- Altomare, A.; Guagnano, A.; Cupertino, F.; Naso, D. Discrete-time control of high-speed salient machines. IEEE Trans. Ind. Appl. 2016, 52, 293–301. [Google Scholar] [CrossRef]
- Matallana, A.; Ibarra, E.; López, I.; Andreu, J.; Garate, J.; Jorda, X.; Rebollo, J. Power module electronics in HEV/EV applications: New trends in widebandgap semiconductor technologies and design aspects. Renew. Sustain. Energy Rev. 2019, 113, 1–33. [Google Scholar] [CrossRef]
- Wang, Y.; Dai, X.; Liu, G.; Jones, S. An overview of advanced power semiconductor packaging for automotive systems. In Proceedings of the Conference on Integrated Power Electronics Systems (CIPS), Nuremberg, Germany, 8–10 March 2016; pp. 1–6. [Google Scholar]
- Electrical and Electronics Technical Team Roadmap; Technical Report; FreedomCAR Power Electronics and Electric Machines, Office of Energy Efficiency & Renewable Energy: Washington, DC, USA, 2017. Available online: https://www.osti.gov/biblio/1220125-electrical-electronics-technical-team-roadmap (accessed on 11 November 2020).
- De Gennaro, M.; Jurgens, J.; Zanon, A.; Gragger, J.; Schlemmer, E.; Fricasse, A.; Marengo, L.; Ponick, B.; Trancho, E.; Kinder, J.; et al. Designing, prototyping and testing of a ferrite permanent magnet assisted synchronous reluctance machine for hybrid and electric vehicles applications. Sustain. Energy Technol. Assess. 2019, 31, 86–101. [Google Scholar] [CrossRef]
- Ciappa, M.; Carbonami, F. Lifetime prediction and design of reliability tests for high power devices in automotive applications. IEEE Trans. Device Mater. Reliab. 2003, 3, 191–196. [Google Scholar] [CrossRef]
- Du, B.; Hudgins, J.; Santi, E.; Bryant, A.; Palmer, P.; Mantooth, H. Transient Electrothermal Simulation of Power Semiconductor Devices. IEEE Trans. Power Electron. 2010, 25, 237–248. [Google Scholar]
- Soldati, A.; Pietrini, G.; Dalboni, M.; Concari, C. Electric-vehicle power converters model-based design-for-reliability. CPSS Trans. Power Electron. 2018, 3, 102–110. [Google Scholar] [CrossRef]
- Lemmens, J.; Vanassche, P.; Driesen, J. Optimal Control of Traction Motor Drives Under Electrothermal Constraints. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 249–263. [Google Scholar] [CrossRef]
- Andresen, M.; Buticchi, G.; Liserre, M. Study of reliability-efficiency tradeoff of active thermal control for power electronic systems. Microelectron. Reliab. 2016, 58, 119–125. [Google Scholar] [CrossRef] [Green Version]
- Lo Cazlo, G.; Lidozzi, A.; Solero, L.; Crescimbini, F.; Cardi, V. Thermal Regulation as Control Reference in Electric Drives. In Proceedings of the International Power Electronics and Motion Control Conference (EPE-PEMC), Novi Sad, Serbia, 4–6 September 2012; pp. 1–7. [Google Scholar]
- Lemmens, J.; Driesen, J.; Vanassche, P. Dynamic DC-link voltage adaptation for thermal management of traction drives. In Proceedings of the IEEE Energy Conversion Congress and Exhibition, Denver, CO, USA, 15–19 September 2013; pp. 180–187. [Google Scholar]
- Sun, T.; Wang, J.; Griffo, A.; Sen, B. Active Thermal Management for Interior Permanent Magnet Synchronous Machine (IPMSM) Drives Based on Model Predictive Control. IEEE Trans. Ind. Appl. 2018, 54, 4506–4514. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Wong, C.; Lee, B.; Baek, J.; Han, K.; Chung, U. IPMSM torque control method considering DC-link voltage variation and friction torque for EV/HEV applications. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Seoul, Korea, 9–12 October 2012; pp. 1063–1069. [Google Scholar]
- Morimoto, S.; Takeda, Y.; Hirasa, T.; Taniguchi, K. Expansion ofoperating limits for permanent magnet motor by current vector control considering inverter capacity. IEEE Trans. Ind. Appl. 1990, 26, 866–871. [Google Scholar] [CrossRef]
- Trancho, E.; Ibarra, E.; Arias, A.; Kortabarria, I.; Jurgens, J.; Marengo, L.; Fricasse, A.; Gragger, J. PM-Assisted Synchronous Reluctance Machine Flux Weakening Control for EV and HEV Applications. IEEE Trans. Ind. Electron. 2018, 65, 2986–2995. [Google Scholar] [CrossRef] [Green Version]
- Susperregui, A.; Martinez, M.; Zubia, I.; Tapia, G. Design and tuning of fixed-switching-frequency second-order sliding-mode controller for doubly fed induction generator power control. IET Electr. Power Appl. 2012, 6, 696–706. [Google Scholar] [CrossRef]
- Drexhage, P.; Wintrich, A. Application Note AN 20-001. In Calculating Junction Temperature Using a Module Temperature Sensor; Technical Report; Semikron: Nuremberg, Germany, 2020. [Google Scholar]
- Silicon Carbide CoolSiCTM MOSFETs. Available online: https://www.infineon.com/cms/en/product/power/mosfet/silicon-carbide/ (accessed on 11 November 2020).
- Ibarra, E.; Ceballos, S.; Andreu, J.; Pérez-Basante, A.; Martínez de Alegría, I. Power loss analysis of Si and SiC devices applied to 1500 V photovoltaic string inverters. In Proceedings of the SAAEI Conference, Ciudad Real, Spain, 2–4 September 2020; pp. 361–365. [Google Scholar]
- Infineon. HybridPACK Automotive Power Modules. Explanation of Technical Information; Technical Report; Infineon Technologies: Neubiberg, Germany, 2010. [Google Scholar]
- Bae, B.; Sul, S. A compensation method for time delay of full-digital synchronous frame current regulator of PWM AC drives. IEEE Trans. Ind. Appl. 2003, 39, 802–810. [Google Scholar] [CrossRef]
- Yim, J.; Sul, S.; Bae, B.; Patel, N.; Hiti, S. odified current control schemes for high performance permanent-magnet AC drives with low sampling to operating frequency. IEEE Trans. Ind. Appl. 2009, 45, 763–771. [Google Scholar] [CrossRef]
- Tsokolis, D.; Tsiakmakis, S.; Dimaratos, A.; Fontaras, G.; Pistikopoulos, P.; Ciuffo, B.; Samaras, Z. Fuel consumption and CO2 emissions of passenger cars over the new worldwide harmonized test protocol. Appl. Energy 2016, 179, 1152–1165. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Units |
|---|---|---|---|
| Power semiconductor maximum drain-source voltage | 1200 | V | |
| Power semiconductor nominal drain current | 400 | A | |
| Nominal switching frequency | 25 | kHz | |
| Nominal battery (DC-link) voltage | 300 | V | |
| Cooling fluid temperature | 105 | C |
| Parameter | Symbol | Value | Units |
|---|---|---|---|
| Maximum power | 75 | kW | |
| Nominal power | 50 | kW | |
| Maximum mechanical speed | 1500 | rpm | |
| Stator maximum current | 400 |
| Parameter | Symbol | Value | Units |
|---|---|---|---|
| Maximum junction temperature constraint | 120 | C | |
| TCT tunable parameter | 1 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trancho, E.; Ibarra, E.; Prieto, P.; Arias, A.; Lis, A.; Pai, A.P. Novel Thermal Management Strategy for Improved Inverter Reliability in Electric Vehicles. Appl. Sci. 2020, 10, 8024. https://doi.org/10.3390/app10228024
Trancho E, Ibarra E, Prieto P, Arias A, Lis A, Pai AP. Novel Thermal Management Strategy for Improved Inverter Reliability in Electric Vehicles. Applied Sciences. 2020; 10(22):8024. https://doi.org/10.3390/app10228024
Chicago/Turabian StyleTrancho, Elena, Edorta Ibarra, Pablo Prieto, Antoni Arias, Adrian Lis, and Ajay Poonjal Pai. 2020. "Novel Thermal Management Strategy for Improved Inverter Reliability in Electric Vehicles" Applied Sciences 10, no. 22: 8024. https://doi.org/10.3390/app10228024
APA StyleTrancho, E., Ibarra, E., Prieto, P., Arias, A., Lis, A., & Pai, A. P. (2020). Novel Thermal Management Strategy for Improved Inverter Reliability in Electric Vehicles. Applied Sciences, 10(22), 8024. https://doi.org/10.3390/app10228024