Trajectory Optimization of Industrial Robot Arms Using a Newly Elaborated “Whip-Lashing” Method


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods: Modelling the Robot Arm and the Original and Improved Trajectories
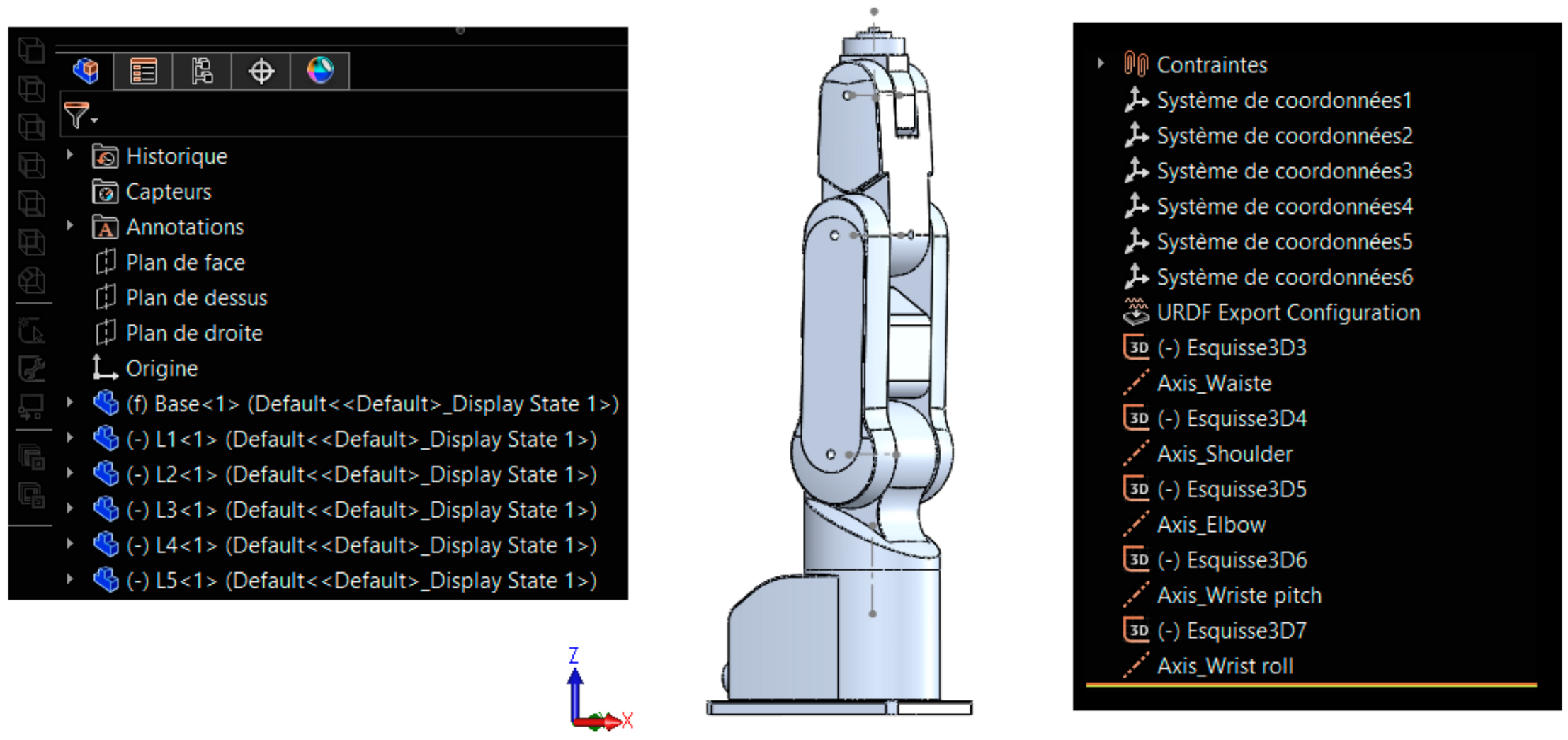
2.1. Dynamic Analysis of RV-2AJ Robot Arm
- RigidBodyTree (RBT) object,
- Home configuration function,
- Inverse Kinematic solver.
2.2. The Original Path
2.3. The Improved Path
3. Results: Newly Elaborated “Whip-Lashing” Method
- (1).
- The velocity diagram shows the changing of the velocity of the tip during a whip-lashing cycle.
- (2).
- The mass diagram shows the changing of the mass of that part of the whip that has the most the kinetic energy during the whip-lashing as the wave impulse goes along the whip length.
- (3).
- The kinetic energy diagram corresponds to the work of the whip user who moves the whip and conveys motion energy to the whip with his hand.
- (4).
- The torque diagram shows the torque value changing in the wrist joint during the whip-lashing.
3.1. Modelling of RV-2AJ Arm Motion as Whip-Lashing in MATLAB Software
3.2. Elaboration of the Cycle Time Minimization (CTM) Algorithm
- A: Filling up the TM torques matrix with the T torque vectors for every i-th trajectory point.
- B: Copying the i-th T torque vector in the i-th column of the TM torques matrix.
- C: Determining the mT[j] maximum torque for the j-th joint.
- D: Checking if any joint torque maximum mT[ j ] exceeds the allowed torque aT[ j ] for the j-th joint.
- E: Refinement of time step ts if necessary and continuing iteration, or finishing if time step ts goes below ending time step ets.
- ts ≤ ets (ts—time step; ets—ending time step),
- mT[j] ≤ aT[j] (mT[j]—the joints’ torque maximums; aT[j]—allowed torque for every j-th joint).
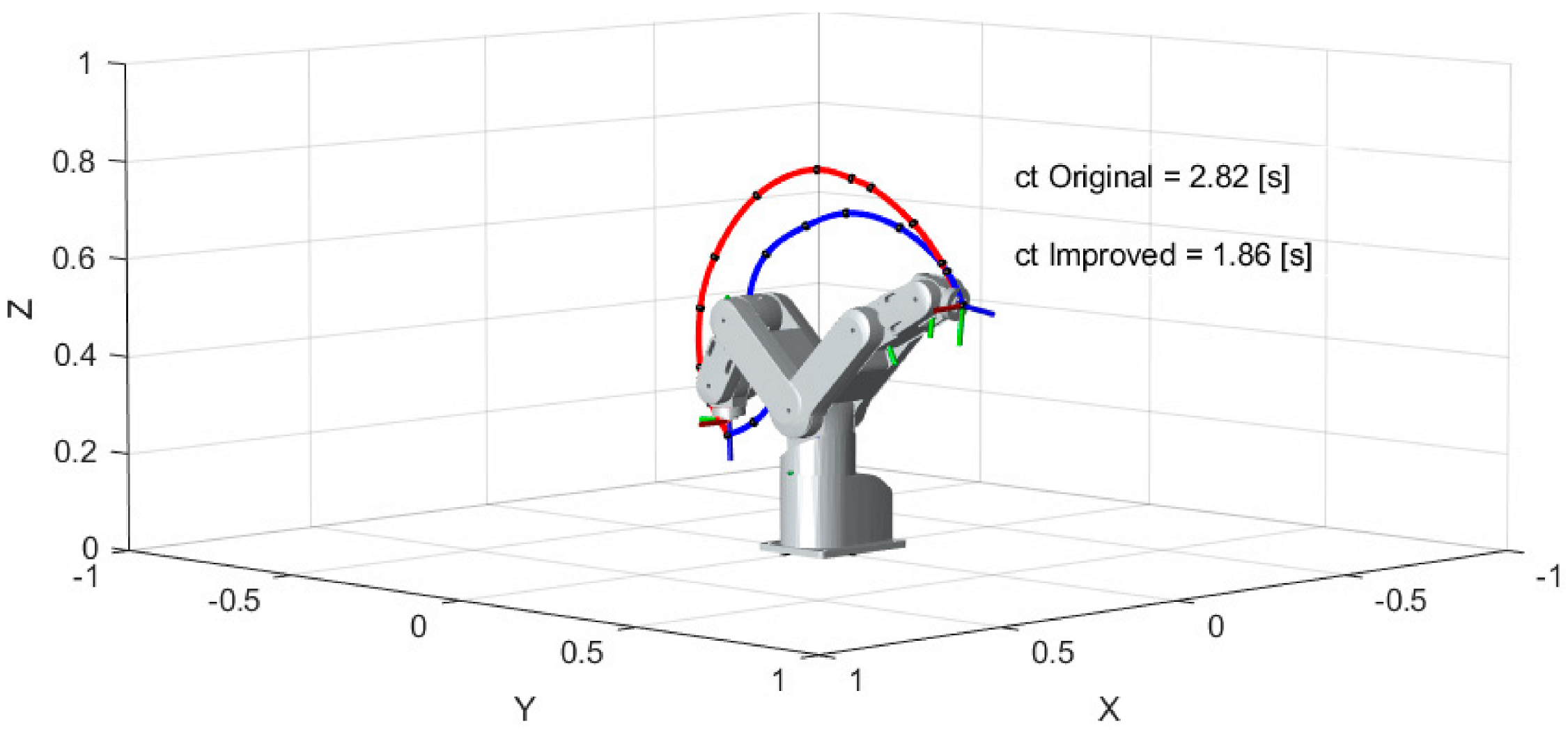
4. Discussion: Trajectory Optimization’s Results of RV-2AJ Arm Using the Application of CTM Algorithm
Modelling of RV-2AJ Arm Motion as Whip-Lashing in MATLAB Software
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Benotsmane, R.; Dudás, L.; Kovács, G. Collaborating robots in Industry 4.0 conception. In Proceedings of the XXIII International Conference on Manufacturing, IOP Conference Series: Materials Science and Engineering, Kecskemét, Hungary, 7–8 June 2018; pp. 1–9. [Google Scholar]
- Benotsmane, R.; Dudás, L.; Kovács, G. Survey on new trends of robotic tools in the automotive industry. In Vehicle and Automotive Engineering 3; VAE 2020. Lecture Notes in Mechanical Engineering; Springer: Singapore, 2021; pp. 443–457. [Google Scholar]
- Dima, I.C.; Kot, S. Capacity of production. In Industrial Production Management in Flexible Manufacturing Systems, 1st ed.; Dima, I.C., Ed.; Book News Inc.: Portland, OR, USA, 2013; pp. 40–67. [Google Scholar]
- Kovács, G. Combination of Lean value-oriented conception and facility layout design for even more significant efficiency improvement and cost reduction. Int. J. Prod. Res. 2020, 58, 2916–2936. [Google Scholar] [CrossRef]
- Benotsmane, R.; Kovács, G.; Dudás, L. Economic, social impacts and operation of smart factories in Industry 4.0 focusing on simulation and artificial intelligence of collaborating robots. Soc. Sci. 2019, 8, 143. [Google Scholar] [CrossRef] [Green Version]
- Delgado, S.D.R.; Kostal, P.; Cagánová, D.; Cambál, M. On the possibilities of intelligence implementation in manufacturing: The role of simulation. Appl. Mech. Mater. 2013, 309, 96–104. [Google Scholar] [CrossRef]
- Yildirim, C.; Sevil Oflaç, B.; Yurt, O. The doer effect of failure and recovery in multi-agent cases: Service supply chain perspective. J. Serv. Theory Pract. 2018, 28, 274–297. [Google Scholar] [CrossRef] [Green Version]
- Gilchrist, A. Industry 4.0: The Industrial Internet of Things; Apress: Bangkok, Thailand, 2014; pp. 1–12. [Google Scholar]
- El Zoghby, N.; Loscri, V.; Natalizio, E.; Cherfaoui, V. Robot cooperation and swarm intelligence. In Wireless Sensor and Robot Networks: From Topology Control to Communication Aspects, 1st ed.; Mitton, N., Simplot-Ryl, D., Eds.; World Scientific Publishing Company: Lille, France, 2014; pp. 168–201. [Google Scholar]
- Alessio, C.; Maratea, M.; Mastrogiovanni, N.; Vallati, M. On the manipulation of articulated objects in human-robot cooperation scenarios. Robot. Auton. Syst. 2018, 109, 139–155. [Google Scholar]
- Benotsmane, R.; Dudás, L.; Kovács, G. Trial—and—error optimization method of pick and place task for RV-2AJ robot arm. In Vehicle and Automotive Engineering 3; VAE 2020. Lecture Notes in Mechanical Engineering; Springer: Singapore, 2021; pp. 458–467. [Google Scholar]
- Yim, M.; Shen, W.; Salemi, B.; Rus, D.; Moll, M.; Lipson, H.; Klavins, E.; Chirikjian, G.S. Modular self-reconfigurable robot systems. IEEE Robot. Autom. Mag. 2007, 14, 43–52. [Google Scholar] [CrossRef]
- Koren, Y.; Heisel, U.; Jovane, F.; Moriwaki, T.; Pritschow, G.; Ulsoy, G.; Van Brussel, H. Reconfigurable manufacturing systems. CIRP Ann. Manuf. Technol. 1999, 48, 527–540. [Google Scholar] [CrossRef]
- Lewis, F.L.; Abdallah, C.T.; Dawson, D.M.; Lewis, F.L. Robot Manipulator Control: Theory and Practice, 2nd ed.; Marcel Dekker: New York, NY, USA, 2004. [Google Scholar]
- Wissama, K.; Etienne, D. Modélisation Identification et Commande des Robots, 2nd ed.; Harmes: Lavoisier, France, 1999. [Google Scholar]
- Liu, X.; Qiu, C.; Zeng, Q.; Li, A. Kinematics analysis and trajectory planning of collaborative welding robot with multiple manipulators. Procedia CIRP 2019, 81, 1034–1039. [Google Scholar] [CrossRef]
- Benotsmane, R.; Kacemi, S.; Benachenhou, M.R. Calculation methodology for trajectory planning of a 6 axis manipulator arm. Ann. Fac. Eng. Hunedoara Int. J. Eng. 2018, 3, 27–32. [Google Scholar]
- Coiffet, P. Les robots: Modélisation et Commande, 1st ed.; Hermes Science Publications: Paris, France, 1986. [Google Scholar]
- Kim, H.; Hong, J.; Ko, K. Optimal design of industrial manipulator trajectory for minimal time operation. KSME J. 1990, 4. [Google Scholar] [CrossRef]
- Straka, M.; Žatkovič, E.; Schréter, R. Simulation as a means of activity streamlining of continuously and discrete production in specific enterprise. Acta Logist. 2014, 1, 11–16. [Google Scholar] [CrossRef]
- Doan, Q.V.; Vo, A.T.; Le, T.D.; Kang, H.-J.; Nguyen, N.H.A. A novel fast terminal sliding mode tracking control methodology for robot manipulators. Appl. Sci. 2020, 10, 3010. [Google Scholar] [CrossRef]
- Joo, S.-H.; Manzoor, S.; Rocha, Y.G.; Bae, S.-H.; Lee, K.-H.; Kuc, T.-Y.; Kim, M. Autonomous navigation framework for intelligent robots based on a semantic environment modeling. Appl. Sci. 2020, 10, 3219. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.-R.; Kim, S.-J.; Kim, D.-H. A practical approach for minimum-time trajectory planning for industrial robots. Ind. Robot Int. J. 2010, 37, 51–61. [Google Scholar] [CrossRef]
- Perumaala, S.; Jawahar, N. Synchronized trigonometric S-curve trajectory for jerk-bounded time-optimal pick and place operation. Int. J. Robot. Autom. 2012, 27, 385–395. [Google Scholar] [CrossRef]
- Avram, O.; Valente, A. Trajectory planning for reconfigurable industrial robots designed to operate in a high precision manufacturing industry. Procedia CIRP 2016, 57, 461–466. [Google Scholar] [CrossRef]
- Macfarlane, S.; Croft, E.A. Jerk-bounded manipulator trajectory planning: Design for real-time applications. IEEE Trans. Robot. Autom. 2003, 19, 42–52. [Google Scholar] [CrossRef] [Green Version]
- Gasparetto, A.; Lanzutti, A.; Vidoni, R.; Zanotto, V. Experimental validation and comparative analysis of optimal time-jerk algorithms for trajectory planning. Robot. Comput. Integr. Manuf. 2012, 28, 164–181. [Google Scholar] [CrossRef]
- Liu, H.; Xiaobo, L.; Wenxiang, W. Time-optimal and jerk-continuous trajectory planning for robot manipulators with kinematic constraints. Robot. Comput. Integr. Manuf. 2013, 29, 309–317. [Google Scholar] [CrossRef]
- Martínez, J.R.G.; Reséndiz, J.R.; Prado, M.Á.M.; Miguel, E.E.C. Assessment of jerk performance s-curve and trapezoidal velocity profiles. In Proceedings of the XIII International Engineering Congress, Universidad Autónoma de Queretaro, Santiago de Queretaro, Mexico, 15–19 May 2017; pp. 1–7. [Google Scholar]
- Fang, Y.; Hu, J.; Liu, W.; Shaw, Q.; Qi, J.; Peng, Y. Smooth and time-optimal S-curve trajectory planning for automated robots and machines. Mech. Mach. Theory 2019, 137, 127–153. [Google Scholar] [CrossRef]
- Zheng, K.; Hu, Y.; Wu, B. Trajectory planning of multi-degree-of-freedom robot with coupling effect. Mech. Sci. Technol. 2019, 33, 413–421. [Google Scholar] [CrossRef]
- Gasparetto, A.; Zanotto, V. A new method for smooth trajectory planning of robot manipulators. Mech. Mach. Theory 2007, 42, 455–471. [Google Scholar] [CrossRef]
- Xidias, E.K. Time-optimal trajectory planning for hyper-redundant manipulators in 3D workspaces. Robot. Comput. Integr. Manuf. 2018, 50, 286–298. [Google Scholar] [CrossRef]
- Hirakawa, A.; Kawamura, A. Trajectory planning of redundant manipulators for minimum energy consumption without matrix inversion. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997; Volume 3, pp. 2415–2420. [Google Scholar]
- Baghli, F.Z.; El Bakkali, L.; Yassine, L. Optimization of arm manipulator trajectory planning in the presence of obstacles by ant colony algorithm. Procedia Eng. 2017, 181, 560–567. [Google Scholar] [CrossRef]
- Saramago, S.F.P.; Steffen, V. Optimization of the trajectory planning of robot manipulators taking into account the dynamics of the system. Mech. Mach. Theory 1998, 33, 883–894. [Google Scholar] [CrossRef]
- Devendra, G.; Manish, K. Optimization techniques applied to multiple manipulators for path planning and torque minimization. Eng. Appl. Artif. Intell. 2002, 15, 241–252. [Google Scholar]
- Zhang, Y.; Shuzhi, S.G.; Tong, H.L. A unified quadratic-programming-based dynamical system approach to joint torque optimization of physically constrained redundant manipulators. IEEE Trans. Syst. 2014, 34, 2126–2132. [Google Scholar] [CrossRef] [Green Version]
- Ding, H.; Li, Y.F.; Tso, S.K. Dynamic optimization of redundant manipulators in worst case using recurrent neural networks. Mech. Mach. Theory 2000, 35, 55–70. [Google Scholar] [CrossRef]
- Saxena, P.; Stavropoulos, P.; Kechagias, J.; Salonitis, K. Sustainability assessment for manufacturing operations. Energies 2020, 13, 2730. [Google Scholar] [CrossRef]
- Onwubolu, G. A Comprehensive Introduction to SolidWorks; SDC Publications: Mission, KS, USA, 2013. [Google Scholar]
- Perutka, K. MATLAB for Engineers—Applications in Control, Electrical Engineering, IT and Robotics; Intech: Rijeka, Croatia, 2011. [Google Scholar]
- Corke, P. Robotics, Vision & Control: Fundamental Algorithms in MATLAB, 2nd ed.; Springer: Victoria, Australia, 2017. [Google Scholar]
- Goriely, A.; McMillen, T. Shape of a Cracking Whip. Phys. Rev. Lett. 2002, 88, 244301. [Google Scholar] [CrossRef]
- Henrot, C. Characterization of Whip Targeting Kinematics in Discrete and Rhythmic Tasks. Bachelor’s Thesis, MIT, Cambridge, MA, USA, 23 June 2016. [Google Scholar]
- Krehl, P.; Engemann, S.; Schwenkel, D. The puzzle of whip cracking—Uncovered by a correlation of whip-tip kinematics with shock wave emission. Shock Waves 1998, 8, 1–9. [Google Scholar] [CrossRef]





















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benotsmane, R.; Dudás, L.; Kovács, G. Trajectory Optimization of Industrial Robot Arms Using a Newly Elaborated “Whip-Lashing” Method. Appl. Sci. 2020, 10, 8666. https://doi.org/10.3390/app10238666
Benotsmane R, Dudás L, Kovács G. Trajectory Optimization of Industrial Robot Arms Using a Newly Elaborated “Whip-Lashing” Method. Applied Sciences. 2020; 10(23):8666. https://doi.org/10.3390/app10238666
Chicago/Turabian StyleBenotsmane, Rabab, László Dudás, and György Kovács. 2020. "Trajectory Optimization of Industrial Robot Arms Using a Newly Elaborated “Whip-Lashing” Method" Applied Sciences 10, no. 23: 8666. https://doi.org/10.3390/app10238666
APA StyleBenotsmane, R., Dudás, L., & Kovács, G. (2020). Trajectory Optimization of Industrial Robot Arms Using a Newly Elaborated “Whip-Lashing” Method. Applied Sciences, 10(23), 8666. https://doi.org/10.3390/app10238666