An Integrated Approach to Real-Time Acoustic Emission Damage Source Localization in Piled Raft Foundations


Abstract
:1. Introduction
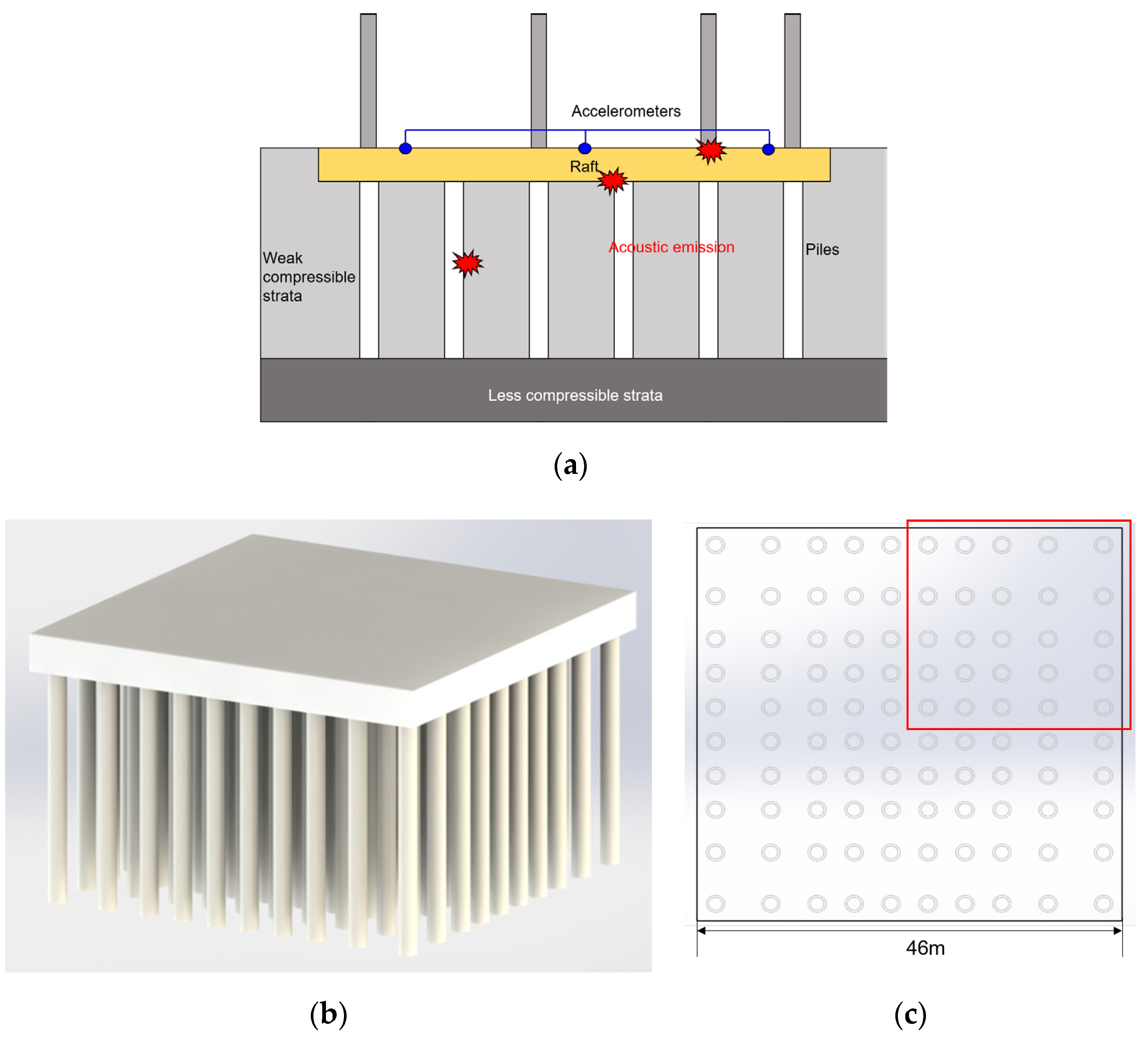
2. Model and Test Setup
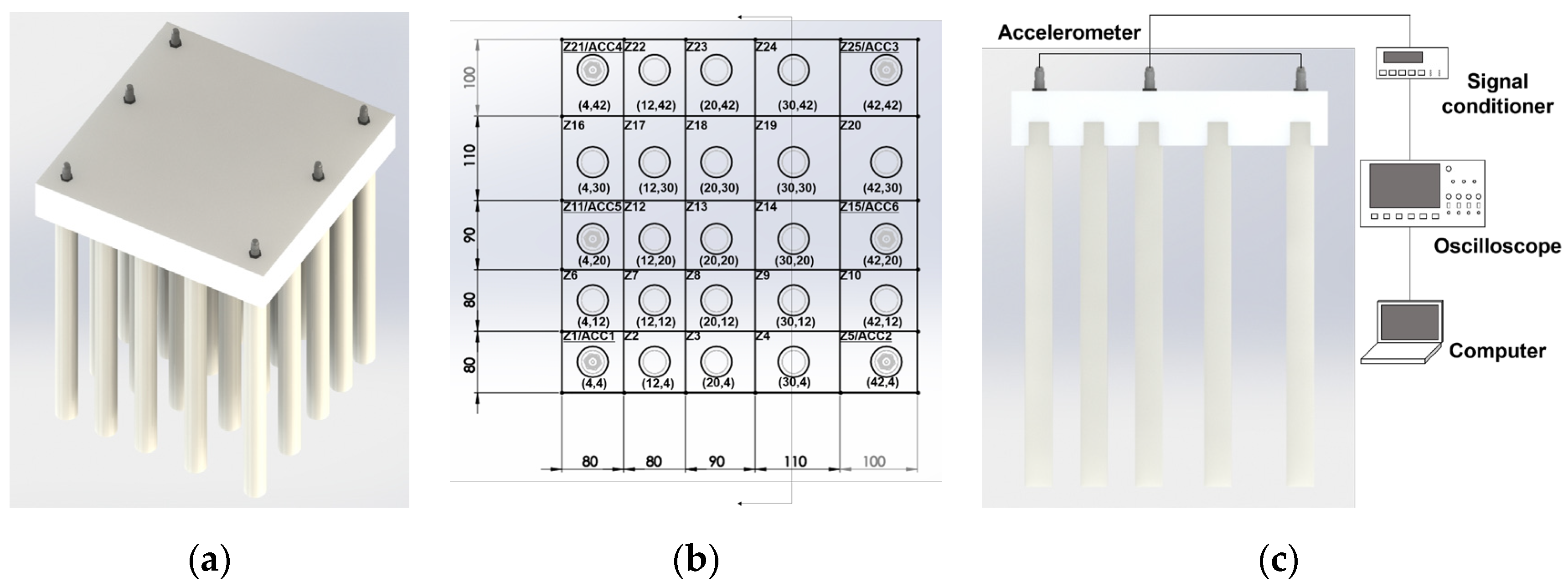
2.1. Scaled Model for Piled-Raft Foundation (PRF)
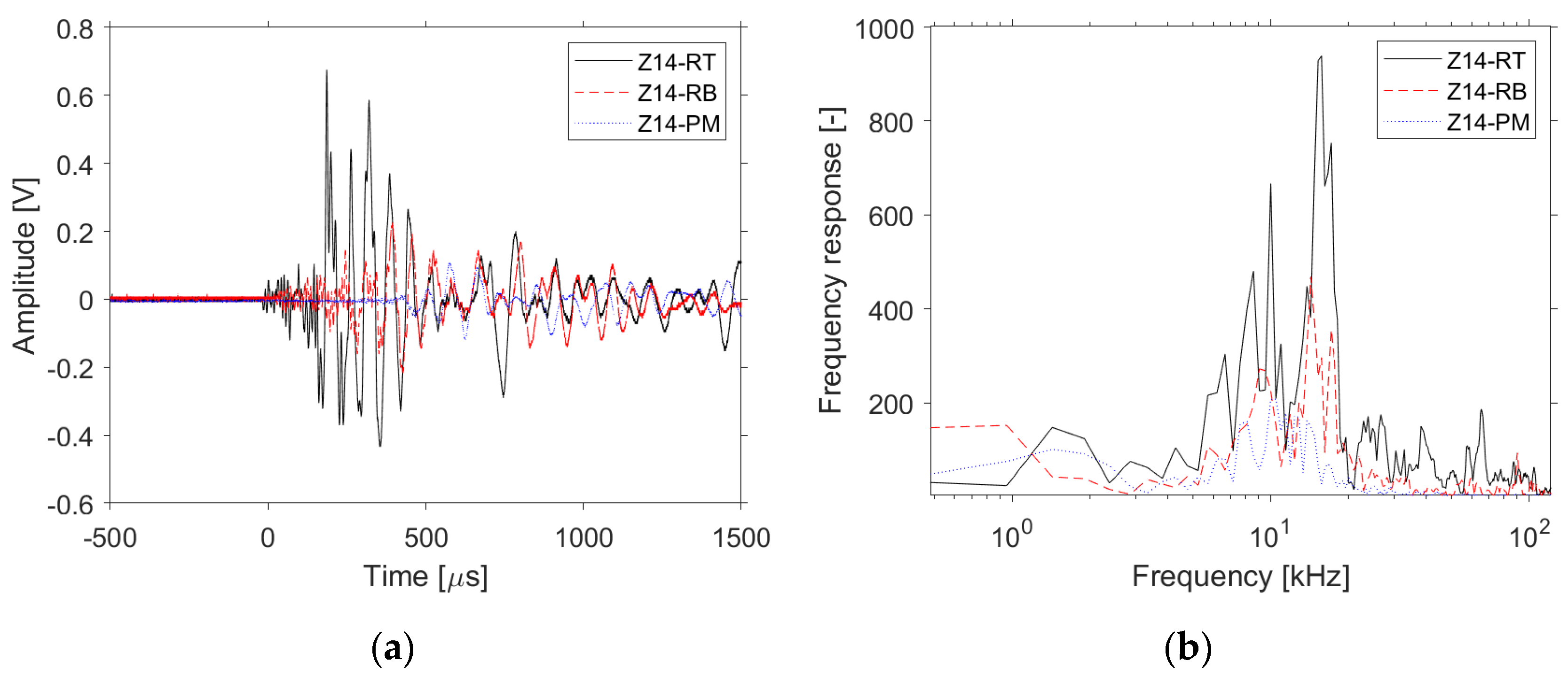
2.2. Setup for Signal Generation and Acquisition
2.3. Experimental Program
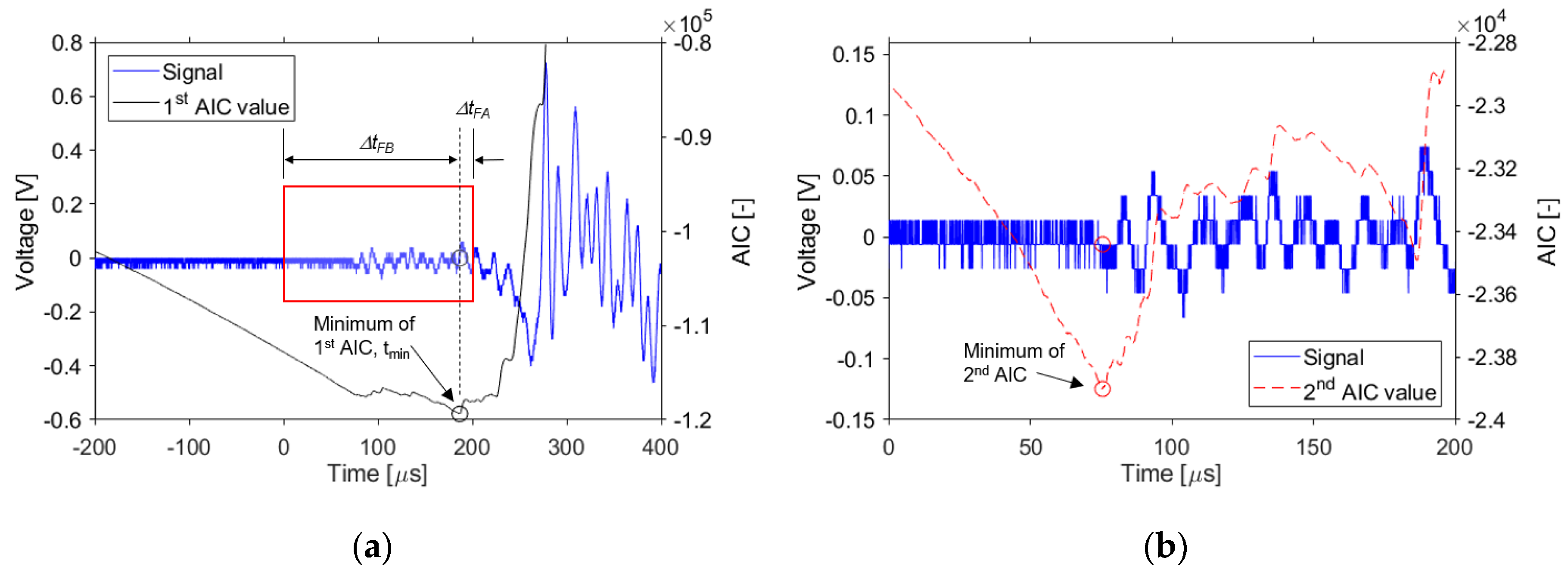
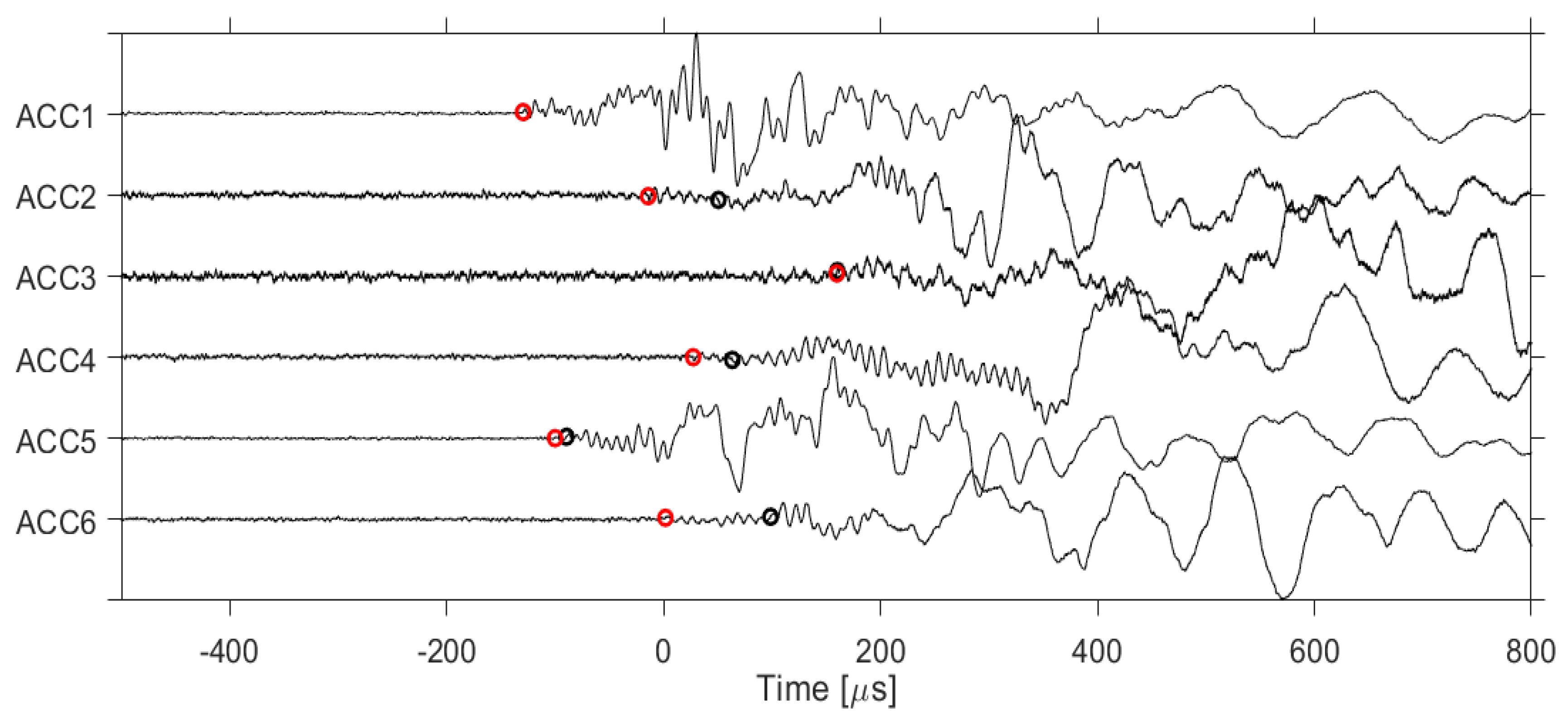
2.4. Single-Stage and Two-Stage AIC Method for Onset Time Determination
2.5. Localization Algorithm of AE Events: Simplex Method
3. Results and Analyses
3.1. Localization of AE Event Sources: Single-Stage AIC Result
3.2. Localization of AE Event Sources: Two-Stage AIC Result
4. Discussion
4.1. Single-Stage AIC Method versus Two-Stage AIC Method
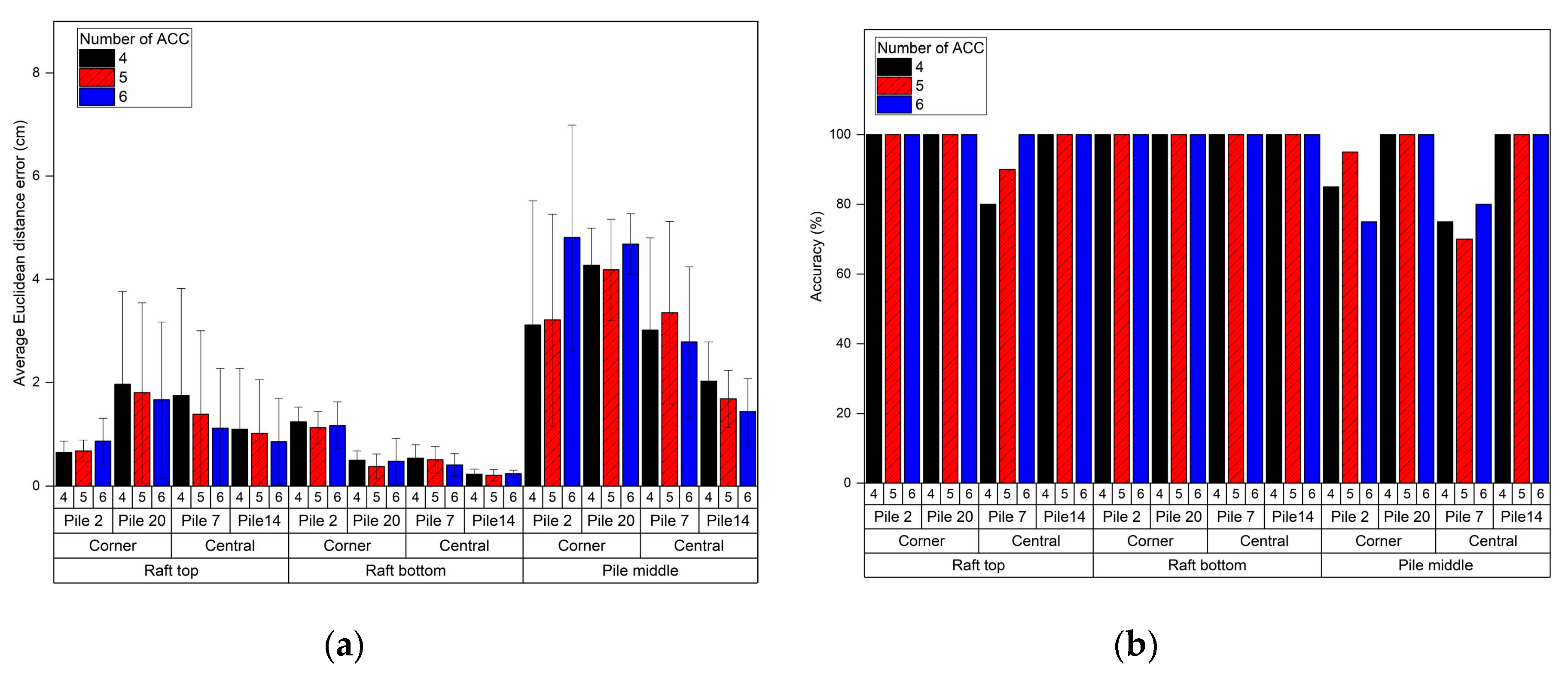
4.2. Effect of Sensor Distance from the Source
5. Summary and Implication
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lockner, D. The role of acoustic emission in the study of rock fracture. Int. J. Rock. Mech. Min. 1993, 30, 883–899. [Google Scholar] [CrossRef]
- Nair, A.; Cai, C.S. Acoustic emission monitoring of bridges: Review and case studies. Eng. Struct. 2010, 32, 1704–1714. [Google Scholar] [CrossRef]
- ASTM E1316. Standard Terminology for Nondestructive Examinations; ASTM International: West Conshohocken, PA, USA, 2006; pp. 1–33. [Google Scholar]
- Grosse, C.U.; Finck, F. Quantitative evaluation of fracture processes in concrete using signal-based acoustic emission techniques. Cem. Concr. Compos. 2006, 28, 330–336. [Google Scholar] [CrossRef] [Green Version]
- Hensman, J.; Mills, R.; Pierce, S.G.; Worden, K.; Eaton, M. Locating acoustic emission sources in complex structures using Gaussian processes. Mech. Syst. Signal Process. 2010, 24, 211–223. [Google Scholar] [CrossRef]
- Holford, K.M.; Davies, A.W.; Pullin, R.; Carter, D.C. Damage location in steel bridges by acoustic emission. J. Intell. Mater. Syst. Struct. 2001, 12, 567–576. [Google Scholar] [CrossRef]
- Kaphle, M.; Tan, A.C.; Thambiratnam, D.P.; Chan, T.H. Identification of acoustic emission wave modes for accurate source location in plate-like structures. Struct. Control Health 2012, 19, 187–198. [Google Scholar] [CrossRef]
- Oh, T.M.; Kim, M.K.; Lee, J.W.; Kim, H.; Kim, M.J. Experimental Investigation on Effective Distances of Acoustic Emission in Concrete Structures. Appl. Sci. 2020, 10, 6051. [Google Scholar] [CrossRef]
- ElBatanouny, M.K.; Ziehl, P.H.; Larosche, A.; Mangual, J.; Matta, F.; Nanni, A. Acoustic emission monitoring for assessment of prestressed concrete beams. Constr. Build. Mater. 2014, 58, 46–53. [Google Scholar] [CrossRef]
- Ohno, K.; Ohtsu, M. Crack classification in concrete based on acoustic emission. Constr. Build. Mater. 2010, 24, 2339–2346. [Google Scholar] [CrossRef]
- Ge, M. Efficient mine microseismic monitoring. Int. J. Coal Geol. 2005, 64, 44–56. [Google Scholar] [CrossRef]
- Han, Q.; Xu, J.; Carpinteri, A.; Lacidogna, G. Localization of acoustic emission sources in structural health monitoring of masonry bridge. Struct. Control Health 2015, 22, 314–329. [Google Scholar] [CrossRef]
- Hirata, A.; Kameoka, Y.; Hirano, T. Safety management based on detection of possible rock bursts by AE monitoring during tunnel excavation. Rock Mech. Rock Eng. 2007, 40, 563–576. [Google Scholar] [CrossRef]
- Carpinteri, A.; Xu, J.; Lacidogna, G.; Manuello, A. Reliable onset time determination and source location of acoustic emissions in concrete structures. Cem. Concr. Compos. 2012, 34, 529–537. [Google Scholar] [CrossRef]
- Pearson, M.R.; Eaton, M.; Featherston, C.; Pullin, R.; Holford, K. Improved acoustic emission source location during fatigue and impact events in metallic and composite structures. Struct. Control Health 2017, 16, 382–399. [Google Scholar] [CrossRef]
- Schechinger, B.; Vogel, T. Acoustic emission for monitoring a reinforced concrete beam subject to four-point-bending. Constr. Build. Mater. 2007, 21, 483–490. [Google Scholar] [CrossRef]
- Baer, M.; Kradolfer, U. An automatic phase picker for local and teleseismic events. B. Seismol. Soc. Am. 1987, 77, 1437–1445. [Google Scholar]
- Hinkley, D.V. Inference about the change-point from cumulative sum tests. Biometrika 1971, 58, 509–523. [Google Scholar] [CrossRef]
- Maeda, N. A method for reading and checking phase times in auto-processing system of seismic wave data. Zisin 1985, 38, 365–379. [Google Scholar] [CrossRef] [Green Version]
- Eaton, M.; Pullin, R.; Holford, K. Toward improved damage location using acoustic emission. J. Mech. Eng. Sci. Proc. Inst. Mech. Eng. Part C. 2012, 226, 2141–2153. [Google Scholar] [CrossRef]
- Zhang, H.; Thurber, C.; Rowe, C. Automatic P-wave arrival detection and picking with multiscale wavelet analysis for single-component recordings. Bull. Seismol. Soc. Am. 2003, 93, 1904–1912. [Google Scholar] [CrossRef] [Green Version]
- Mokhtar, I.; Yahya, M.Y.; Kadir, M.R.A.; Kambali, M.F. Effect on mechanical performance of UHMWPE/HDPE-blend reinforced with kenaf, basalt and hybrid kenaf/basalt fiber. Polym.-Plast. Technol. Eng. 2013, 52, 1140–1146. [Google Scholar] [CrossRef]
- Sotomayor, M.E.; Krupa, I.; Várez, A.; Levenfeld, B. Thermal and mechanical characterization of injection moulded high density polyethylene/paraffin wax blends as phase change materials. Renew. Energy 2014, 68, 140–145. [Google Scholar] [CrossRef]
- Elshimi, T.M.; Moore, I.D. Modeling the effects of backfilling and soil compaction beside shallow buried pipes. J. Pipeline Syst. Eng. Pract. 2013, 4, 04013004. [Google Scholar] [CrossRef]
- ASTM E976. Guide for Determining the Reproducibility of Acoustic Emission Sensor Response; ASTM International: West Conshohocken, PA, USA, 2005. [Google Scholar]
- Hsu, N.N.; Brecknbridge, F.R. Characterization and calibration of acoustic emission sensors. Mater. Eval. 1979, 39, 60–68. [Google Scholar]
- Sause, M.G. Investigation of pencil-lead breaks as acoustic emission sources. J. Acoust. Emiss. 2011, 29, 184–196. [Google Scholar]
- Sikdar, S.; Ostachowicz, W.; Pal, J. Damage-induced acoustic emission source identification in an advanced sandwich composite structure. Compos. Struct. 2018, 202, 860–866. [Google Scholar] [CrossRef]
- Sikdar, S.; Mirgal, P.; Banerjee, S.; Ostachowicz, W. Damage-induced acoustic emission source monitoring in a honeycomb sandwich composite structure. Compos. Part B Eng. 2019, 158, 179–188. [Google Scholar] [CrossRef]
- Kurz, J.H.; Grosse, C.U.; Reinhardt, H.W. Strategies for reliable automatic onset time picking of acoustic emissions and of ultrasound signals in concrete. Ultrasonics 2005, 43, 538–546. [Google Scholar] [CrossRef]
- Mhamdi, L. Seismology-Based Approaches for the Quantitative Acoustic Emission Monitoring of Concrete Structures. Ph.D. Thesis, University of Delaware, Newark, DE, USA, 2015. [Google Scholar]
- Sedlak, P.; Hirose, Y.; Khan, S.A.; Enoki, M.; Sikula, J. New automatic localization technique of acoustic emission signals in thin metal plates. Ultrasonics 2009, 49, 254–262. [Google Scholar] [CrossRef]
- Sedlak, P.; Hirose, Y.; Enoki, M. Acoustic emission localization in thin multi-layer plates using first-arrival determination. Mech. Syst. Signal Process. 2013, 36, 636–649. [Google Scholar] [CrossRef]
- Prugger, A.F.; Gendzwill, D.J. Microearthquake location: A nonlinear approach that makes use of a simplex stepping procedure. Bull. Seismol. Soc. Am. 1988, 78, 799–815. [Google Scholar]
- Ge, M. Analysis of source location algorithms: Part II. Iterative methods. J. Acoust. Emiss. 2003, 21, 29–51. [Google Scholar]
- Ziehl, P.; ElBatanouny, M. Acoustic emission monitoring for corrosion damage detection and classification. In Corrosion of Steel in Concrete Structures; Woodhead Publishing: Cambridge, UK, 2016; pp. 193–209. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Zone# | Single-Stage AIC | Two-Stage AIC | |||
|---|---|---|---|---|---|---|
| EDE (cm) | Zonation Accuracy (%) | EDE (cm) | Zonation Accuracy (%) | |||
| Raft top | Corner | 2 | 8.24 | 25% (5/20) | 0.87 | 100% (20/20) |
| 3 | 1.95 | 100% (20/20) | 0.48 | 100% (20/20) | ||
| 4 | 2.06 | 100% (20/20) | 1.24 | 100% (20/20) | ||
| 10 | 2.29 | 100% (20/20) | 1.03 | 100% (20/20) | ||
| 20 | 3.15 | 85% (17/20) | 1.66 | 100% (20/20) | ||
| Ave. | 3.54 | 82% (82/100) | 1.06 | 100% (100/100) | ||
| Central | 7 | 2.63 | 80% (16/20) | 1.12 | 100% (20/20) | |
| 8 | 1.57 | 100% (20/20) | 0.42 | 100% (20/20) | ||
| 9 | 1.49 | 100% (20/20) | 0.84 | 100% (20/20) | ||
| 13 | 2.52 | 80% (16/20) | 1.67 | 90% (18/20) | ||
| 14 | 1.73 | 100% (20/20) | 0.86 | 100% (20/20) | ||
| 19 | 1.56 | 100% (20/20) | 0.98 | 100% (20/20) | ||
| Ave. | 1.92 | 93.3% (112/120) | 0.98 | 98.3% (118/120) | ||
| Ave. | 2.65 | 88.2% (194/220) | 1.02 | 99.1% (218/220) | ||
| Raft bottom | Corner | 2 | 1.49 | 100% (17/17) | 1.17 | 100% (17/17) |
| 3 | 1.39 | 100% (20/20) | 1.19 | 100% (20/20) | ||
| 4 | 0.57 | 100% (20/20) | 0.44 | 100% (20/20) | ||
| 10 | 1.88 | 95% (19/20) | 0.94 | 100% (20/20) | ||
| 15 | 1.69 | 100% (20/20) | 1.04 | 100% (20/20) | ||
| 20 | 0.74 | 100% (20/20) | 0.48 | 100% (20/20) | ||
| Ave. | 1.29 | 99.1% (116/117) | 0.88 | 100% (117/117) | ||
| Central | 7 | 1.56 | 100% (20/20) | 1.57 | 100% (20/20) | |
| 8 | 0.45 | 100% (20/20) | 0.42 | 100% (20/20) | ||
| 9 | 0.43 | 100% (20/20) | 0.36 | 100% (20/20) | ||
| 14 | 0.64 | 100% (20/20) | 0.24 | 100% (20/20) | ||
| Ave. | 0.77 | 100% (80/80) | 0.65 | 100% (80/80) | ||
| Ave. | 1.08 | 99.5% (196/197) | 0.78 | 100% (197/197) | ||
| Pile middle | Corner | 1 | 4.47 | 100% (20/20) | 5.24 | 60% (12/20) |
| 2 | 6.72 | 30% (6/20) | 4.81 | 75% (15/20) | ||
| 3 | 4.33 | 90% (18/20) | 4.26 | 100% (20/20) | ||
| 4 | 3.92 | 100% (20/20) | 3.05 | 80% (16/20) | ||
| 5 | 6.20 | 100% (20/20) | 5.04 | 75% (15/20) | ||
| 10 | 4.76 | 95% (19/20) | 5.01 | 85% (17/20) | ||
| 15 | 4.70 | 100% (20/20) | 4.75 | 95% (19/20) | ||
| 20 | 4.38 | 100% (20/20) | 4.68 | 100% (20/20) | ||
| 25 | 4.38 | 100% (20/20) | 4.35 | 100% (20/20) | ||
| Ave. | 4.87 | 90.56% (163/180) | 4.58 | 85.56% (154/180) | ||
| Central | 7 | 6.68 | 5% (1/20) | 2.78 | 80% (16/20) | |
| 8 | 4.30 | 80% (16/20) | 2.17 | 95% (19/20) | ||
| 9 | 6.09 | 50% (10/20) | 3.03 | 95% (19/20) | ||
| 13 | 3.00 | 95% (19/20) | 2.37 | 100% (20/20) | ||
| 14 | 3.74 | 70% (14/20) | 1.44 | 100% (20/20) | ||
| 19 | 4.08 | 100% (20/20) | 2.11 | 100% (20/20) | ||
| Ave. | 4.68 | 66.67% (80/120) | 2.64 | 95% (114/120) | ||
| Ave. | 5.17 | 75.7% (227/300) | 3.88 | 86.3% (259/300) | ||
| Ave. | 3.11 | 88.28% (633/717) | 2.06 | 95.29% (683/717) | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.-M.; Han, G.; Kim, H.; Oh, T.-M.; Kim, J.-S.; Kwon, T.-H. An Integrated Approach to Real-Time Acoustic Emission Damage Source Localization in Piled Raft Foundations. Appl. Sci. 2020, 10, 8727. https://doi.org/10.3390/app10238727
Kim Y-M, Han G, Kim H, Oh T-M, Kim J-S, Kwon T-H. An Integrated Approach to Real-Time Acoustic Emission Damage Source Localization in Piled Raft Foundations. Applied Sciences. 2020; 10(23):8727. https://doi.org/10.3390/app10238727
Chicago/Turabian StyleKim, Yong-Min, Gyeol Han, Hyunwoo Kim, Tae-Min Oh, Jin-Seop Kim, and Tae-Hyuk Kwon. 2020. "An Integrated Approach to Real-Time Acoustic Emission Damage Source Localization in Piled Raft Foundations" Applied Sciences 10, no. 23: 8727. https://doi.org/10.3390/app10238727
APA StyleKim, Y.-M., Han, G., Kim, H., Oh, T.-M., Kim, J.-S., & Kwon, T.-H. (2020). An Integrated Approach to Real-Time Acoustic Emission Damage Source Localization in Piled Raft Foundations. Applied Sciences, 10(23), 8727. https://doi.org/10.3390/app10238727