Model Predictive Control Method Based on Deterministic Reference Voltage for Single-Phase Three-Level NPC Converters



Abstract
:1. Introduction
2. Single-Phase NPC Converter Structure and Conventional MPC Approach
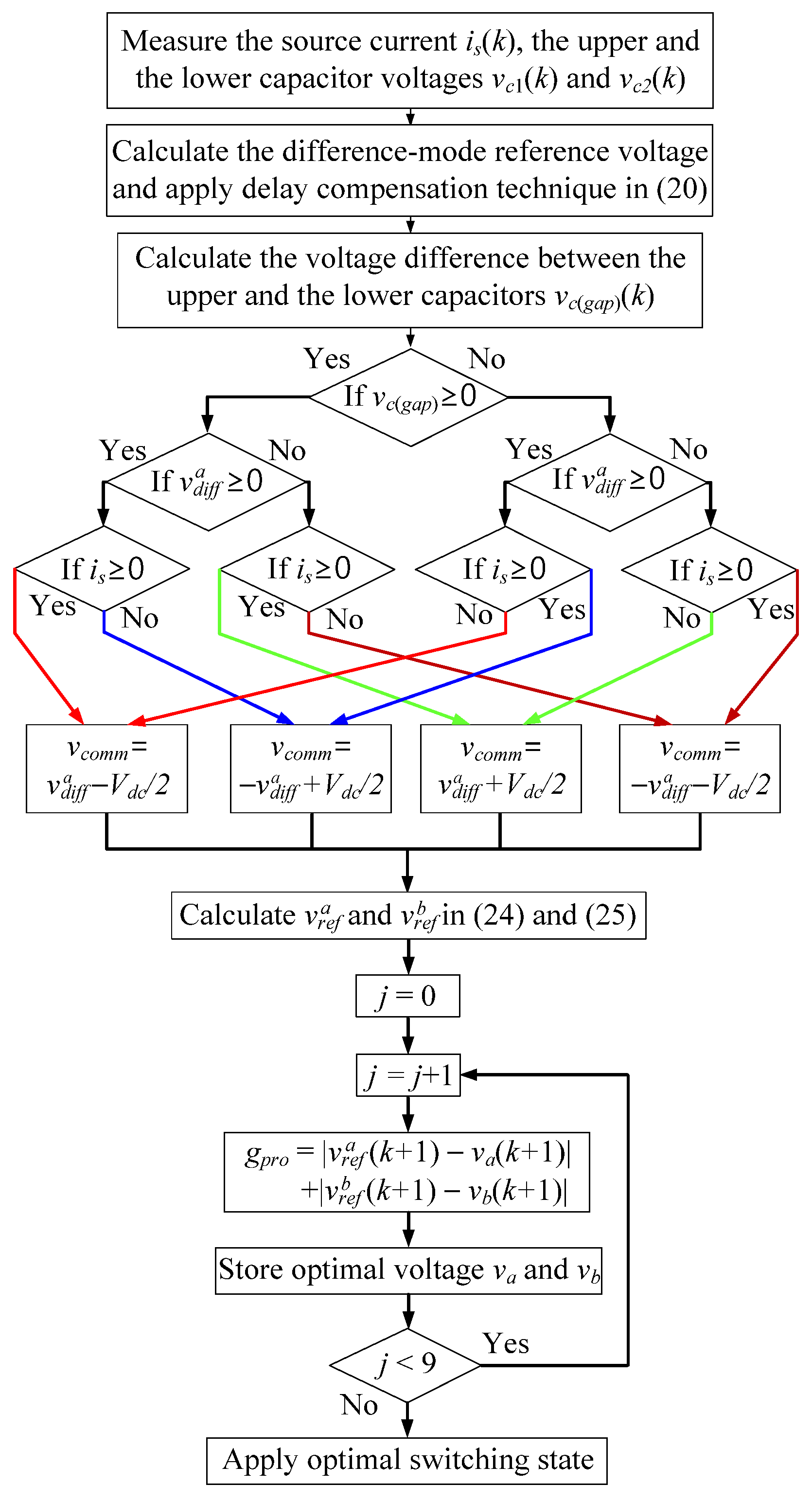
3. Proposed MPC Method
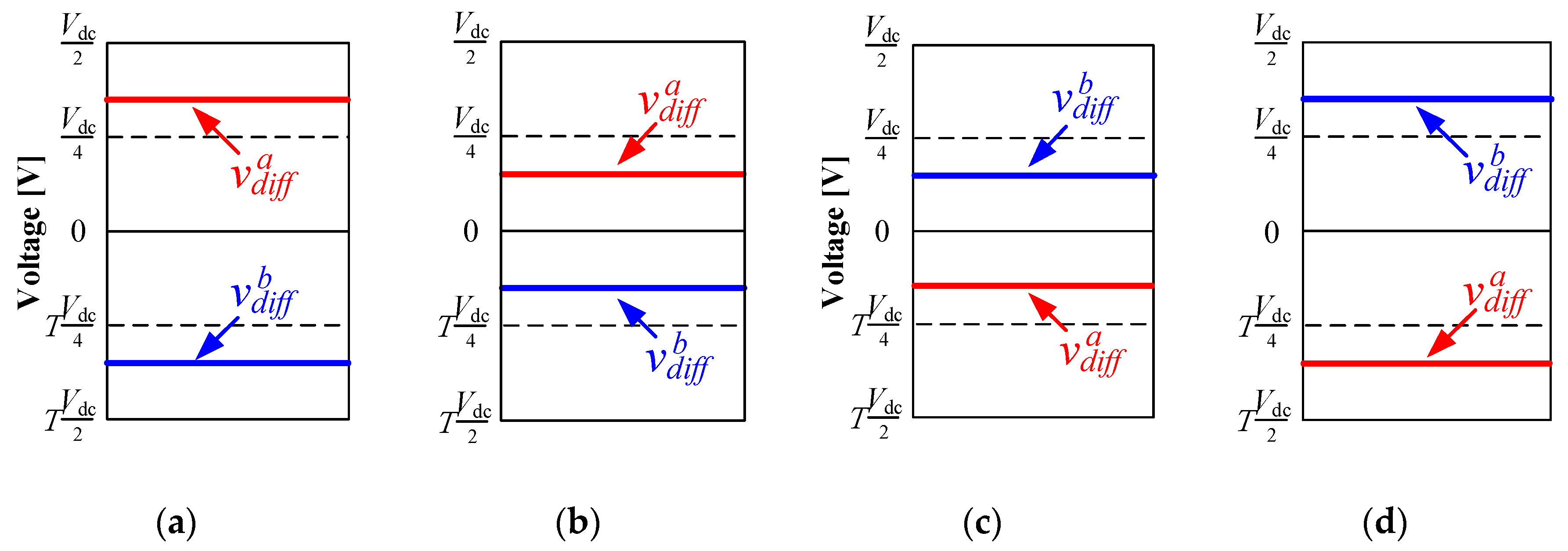
3.1. Difference-Mode Voltage Term for AC Source Current Generation
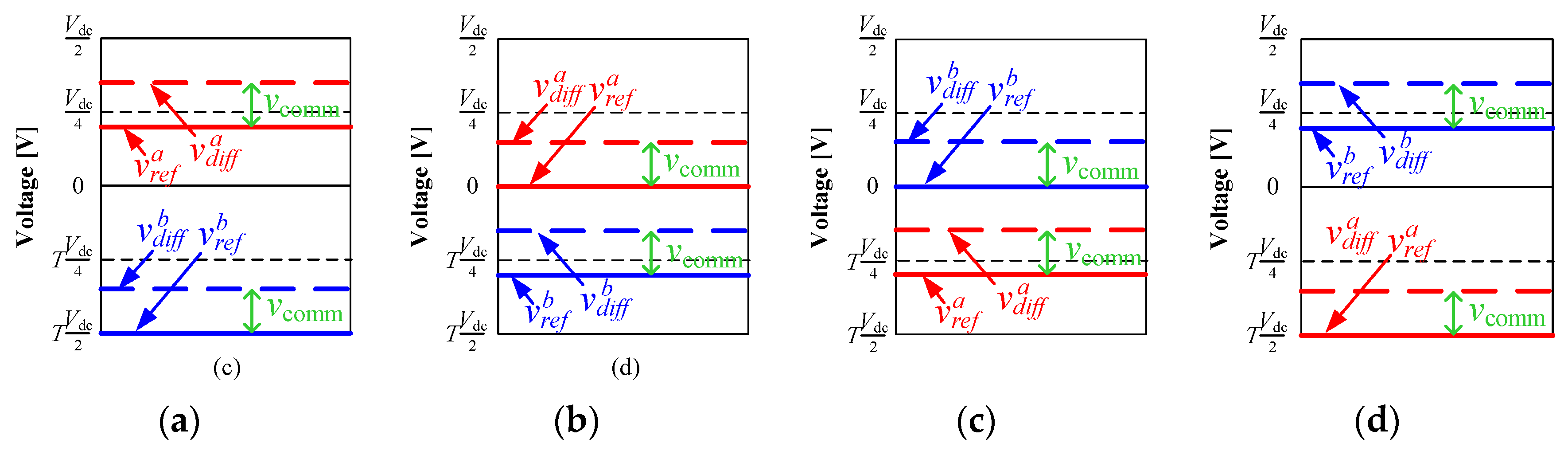
3.2. Common-Mode Voltage Term for Capacitor Voltage Balancing
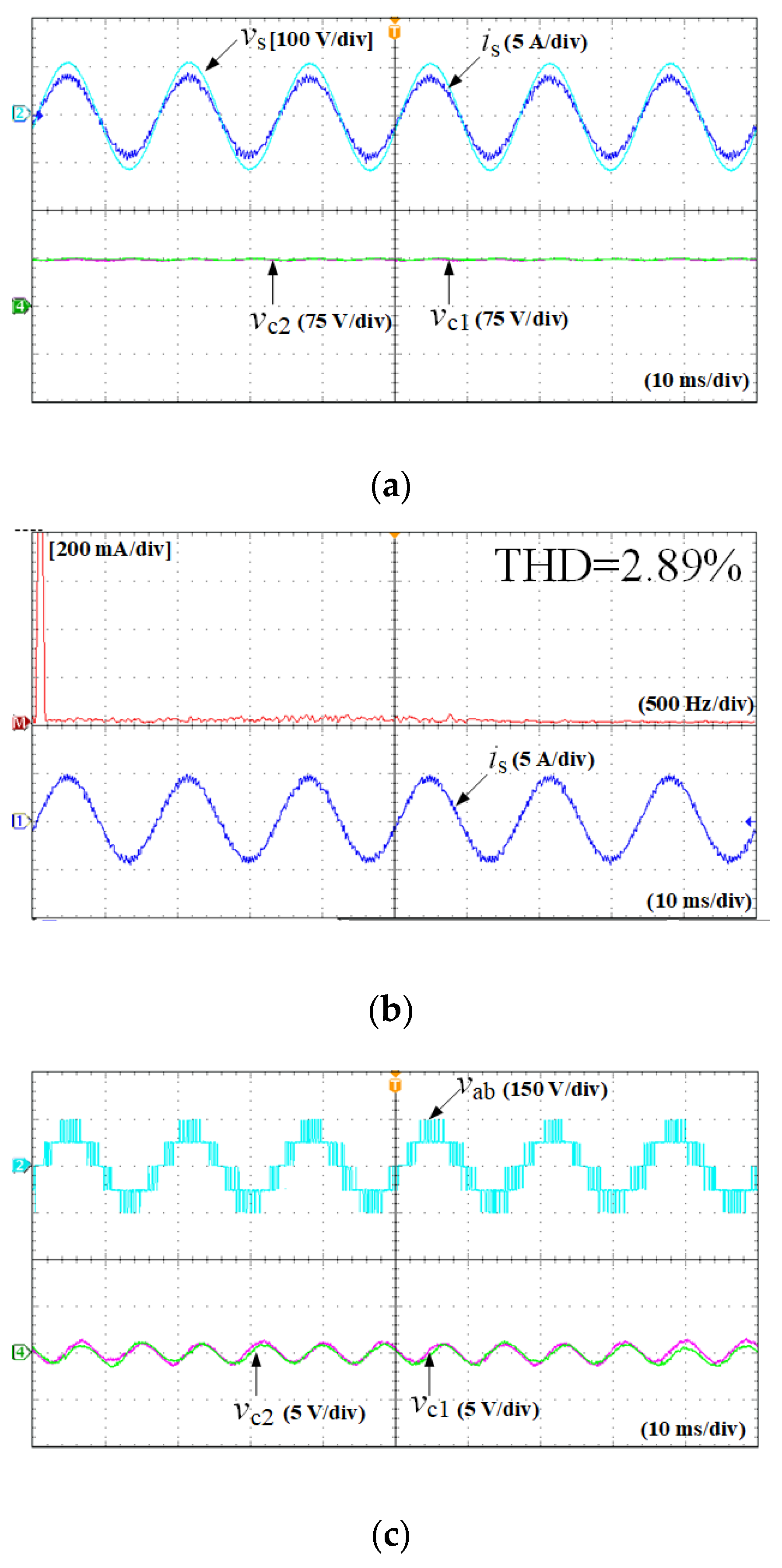
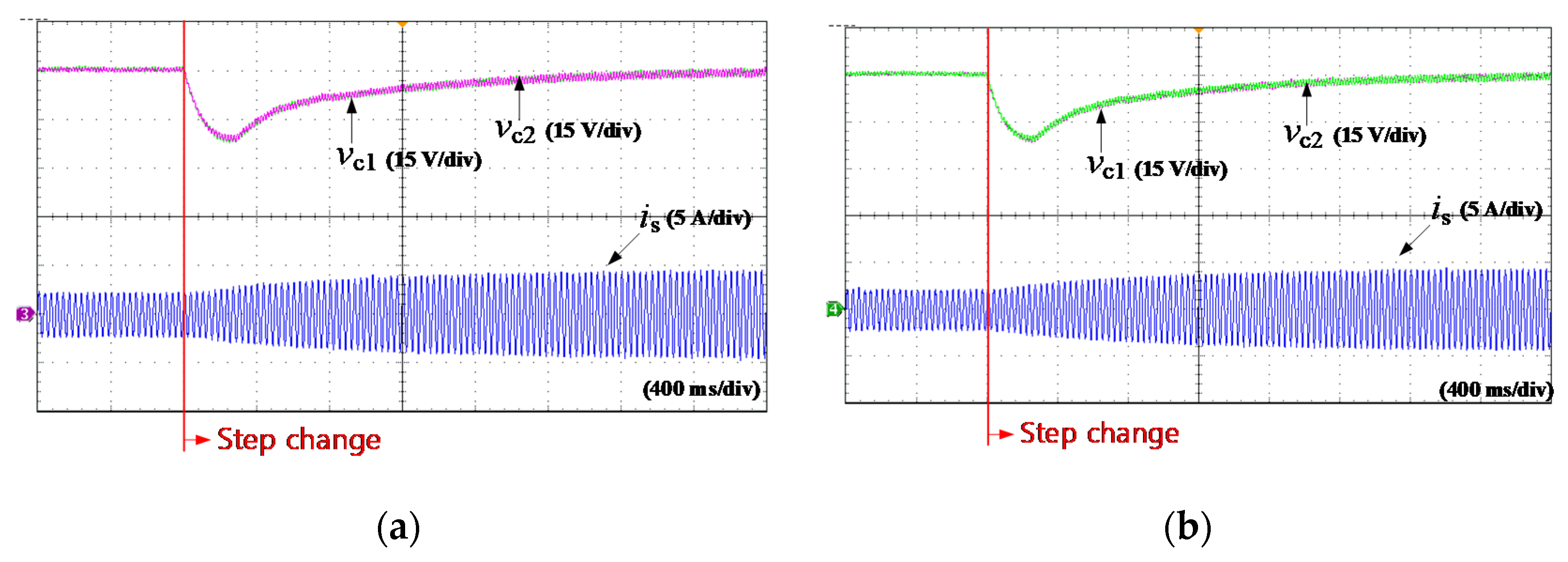
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kaźmierkowski, M.P.; Krishnan, R.; Blaabjerg, F. Control in Power Electronics: Selected Problems; Academic Press: Amsterdam, The Netherlands; New York, NY, USA, 2002; ISBN 9780080490786. [Google Scholar]
- Hill, R.J. Electric railway traction. Part 2: Traction drives with three-phase induction motors. Power Eng. J. 1994, 8, 143–152. [Google Scholar] [CrossRef]
- Steimel, A. Electric railway traction in Europe. IEEE Ind. Appl. Mag. 1996, 2, 6–17. [Google Scholar] [CrossRef]
- Takahashi, S.; Ogasawara, S.; Takemoto, M.; Orikawa, K.; Tamate, M. Common-Mode Voltage Attenuation of an Active Common-Mode Filter in a Motor Drive System Fed by a PWM Inverter. IEEE Trans. Ind. Applicat. 2019, 55, 2721–2730. [Google Scholar] [CrossRef]
- Jun, E.-S.; Park, S.; Kwak, S. Model Predictive Current Control Method with Improved Performances for Three-Phase Voltage Source Inverters. Electronics 2019, 8, 625. [Google Scholar] [CrossRef] [Green Version]
- Guzman, R.; de Vicuna, L.G.; Camacho, A.; Miret, J.; Rey, J.M. Receding-Horizon Model-Predictive Control for a Three-Phase VSI With an LCL Filter. IEEE Trans. Ind. Electron. 2019, 66, 6671–6680. [Google Scholar] [CrossRef] [Green Version]
- Mun, S.; Kwak, S. Reducing Common-Mode Voltage of Three-Phase VSIs using the Predictive Current Control Method based on Reference Voltage. J. Power Electron. 2015, 15, 712–720. [Google Scholar] [CrossRef]
- Fernão Pires, V.; Romero-Cadaval, E.; Vinnikov, D.; Roasto, I.; Martins, J.F. Power converter interfaces for electrochemical energy storage systems–A review. Energy Convers Manag. 2014, 86, 453–475. [Google Scholar] [CrossRef]
- Acuna, P.; Moran, L.; Rivera, M.; Aguilera, R.; Burgos, R.; Agelidis, V.G. A Single-Objective Predictive Control Method for a Multivariable Single-Phase Three-Level NPC Converter-Based Active Power Filter. IEEE Trans. Ind. Electron. 2015, 62, 4598–4607. [Google Scholar] [CrossRef]
- Habibullah, M.; Lu, D.D.-C.; Xiao, D.; Rahman, M.F. Finite-State Predictive Torque Control of Induction Motor Supplied From a Three-Level NPC Voltage Source Inverter. IEEE Trans. Power Electron. 2017, 32, 479–489. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B. Predictive Control of a Three-Level Boost Converter and an NPC Inverter for High-Power PMSG-Based Medium Voltage Wind Energy Conversion Systems. IEEE Trans. Power Electron. 2014, 29, 5308–5322. [Google Scholar] [CrossRef]
- Song, W.; Feng, X.; Smedley, K.M. A Carrier-Based PWM Strategy with the Offset Voltage Injection for Single-Phase Three-Level Neutral-Point-Clamped Converters. IEEE Trans. Power Electron. 2013, 28, 1083–1095. [Google Scholar] [CrossRef]
- Choi, U.-M.; Lee, H.-H.; Lee, K.-B. Simple Neutral-Point Voltage Control for Three-Level Inverters Using a Discontinuous Pulse Width Modulation. IEEE Trans. Energy Convers. 2013, 28, 434–443. [Google Scholar] [CrossRef]
- Tallam, R.M.; Naik, R.; Nondahl, T.A. A Carrier-Based PWM Scheme for Neutral-Point Voltage Balancing in Three-Level Inverters. IEEE Trans. Ind. Applicat. 2005, 41, 1734–1743. [Google Scholar] [CrossRef]
- de Freitas, I.S.; Bandeira, M.M.; de Macedo Barros, L.; Jacobina, C.B.; dos Santos, E.C.; Salvadori, F.; da Silva, S.A. A Carrier-Based PWM Technique for Capacitor Voltage Balancing of Single-Phase Three-Level Neutral-Point-Clamped Converters. IEEE Trans. Ind. Appl. 2015, 51, 3227–3235. [Google Scholar] [CrossRef]
- Wang, S.; Ge, X.; Xiong, C.; Song, W.; Feng, X. Single-phase three-level space vector pulse width modulation algorithm for grid-side railway traction converter and its relationship of carrier-based pulse width modulation. IET Electr. Syst. Transp. 2014, 4, 78–87. [Google Scholar] [CrossRef]
- Nabae, A.; Takahashi, I.; Akagi, H. A New Neutral-Point-Clamped PWM Inverter. IEEE Trans. Ind. Appl. 1981, IA-17, 518–523. [Google Scholar] [CrossRef]
- Lai, J.-S.; Peng, F.Z. Multilevel converters-a new breed of power converters. IEEE Trans. Ind. Appl. 1996, 32, 509–517. [Google Scholar] [CrossRef]
- Stala, R. Application of Balancing Circuit for DC-Link Voltages Balance in a Single-Phase Diode-Clamped Inverter with Two Three-Level Legs. IEEE Trans. Ind. Electron. 2011, 58, 4185–4195. [Google Scholar] [CrossRef]
- Habibullah, M.; Lu, D.D.-C.; Xiao, D.; Fletcher, J.E.; Rahman, M.F. Predictive Torque Control of Induction Motor Sensorless Drive Fed by a 3L-NPC Inverter. IEEE Trans. Ind. Inf. 2017, 13, 60–70. [Google Scholar] [CrossRef]
- Song, W.; Ma, J.; Zhou, L.; Feng, X. Deadbeat Predictive Power Control of Single-Phase Three-Level Neutral-Point-Clamped Converters Using Space-Vector Modulation for Electric Railway Traction. IEEE Trans. Power Electron. 2016, 31, 721–732. [Google Scholar] [CrossRef]
- Barros, J.D.; Silva, J.F. Optimal Predictive Control of Three-Phase NPC Multilevel Converter for Power Quality Applications. IEEE Trans. Ind. Electron. 2008, 55, 3670–3681. [Google Scholar] [CrossRef]
- Barros, J.D.; Silva, J.F.A.; Jesus, E.G.A. Fast-Predictive Optimal Control of NPC Multilevel Converters. IEEE Trans. Ind. Electron. 2013, 60, 619–627. [Google Scholar] [CrossRef]
- Scoltock, J.; Geyer, T.; Madawala, U.K. Model Predictive Direct Power Control for Grid-Connected NPC Converters. IEEE Trans. Ind. Electron. 2015, 62, 5319–5328. [Google Scholar] [CrossRef]
- Donoso, F.; Mora, A.; Cardenas, R.; Angulo, A.; Saez, D.; Rivera, M. Finite-Set Model-Predictive Control Strategies for a 3L-NPC Inverter Operating With Fixed Switching Frequency. IEEE Trans. Ind. Electron. 2018, 65, 3954–3965. [Google Scholar] [CrossRef]
- Calle-Prado, A.; Alepuz, S.; Bordonau, J.; Nicolas-Apruzzese, J.; Cortes, P.; Rodriguez, J. Model Predictive Current Control of Grid-Connected Neutral-Point-Clamped Converters to Meet Low-Voltage Ride-Through Requirements. IEEE Trans. Ind. Electron. 2015, 62, 1503–1514. [Google Scholar] [CrossRef] [Green Version]
- Jun, E.-S.; Kwak, S. A Highly Efficient Single-Phase Three-Level Neutral Point Clamped (NPC) Converter Based on Predictive Control with Reduced Number of Commutations. Energies 2018, 11, 3524. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Wen, H.; Fan, M.; Xie, M.; Chen, R. Fast Finite-Switching-State Model Predictive Control Method Without Weighting Factors for T-Type Three-Level Three-Phase Inverters. IEEE Trans. Ind. Inf. 2019, 15, 1298–1310. [Google Scholar] [CrossRef]
- Wu, W.; Wang, D.; Liu, L. A Multi-Layer Sequential Model Predictive Control of Three-Phase Two-Leg Seven-Level T-Type Nested Neutral Point Clamped Converter Without Weighting Factors. IEEE Access 2019, 7, 162735–162746. [Google Scholar] [CrossRef]
- Liu, X.; Qiu, L.; Fang, Y.; Ma, J.; Wu, W.; Peng, Z.; Wang, D. Lyapunov-based finite control-set model predictive control for nested neutral point-clamped converters without weighting factors. Int. J. Electr. Power Energy Syst. 2020, 121, 106071. [Google Scholar] [CrossRef]
- Jun, E.; Sangshin-Kwak; Baek, J. Model Predictive Control Method with NP Voltage Balance by Offset Voltage Injection for Single-phase NPC Converters. In Proceedings of the 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; IEEE: Vancouver, BC, Canada, 2019; pp. 914–919. [Google Scholar]
- Jun, E.-S.; Nguyen, M.H.; Kwak, S. Three-Phase Three-Level Neutral Point Clamped Rectifier with Predictive Control Method without Employing Weighting Factor. Appl. Sci. 2020, 10, 5149. [Google Scholar] [CrossRef]
- Jun, E.-S.; Nguyen, M.H.; Kwak, S.-S. Model Predictive Control Method With NP Voltage Balance by Offset Voltage Injection for Three-Phase Three-Level NPC Inverter. IEEE Access 2020, 8, 172175–172195. [Google Scholar] [CrossRef]
- Kwak, S.; Park, J.-C. Predictive Control Method with Future Zero-Sequence Voltage to Reduce Switching Losses in Three-Phase Voltage Source Inverters. IEEE Trans. Power Electron. 2015, 30, 1558–1566. [Google Scholar] [CrossRef]
- Kim, J.-C.; Moon, S.-K.; Kwak, S. Direct model-based predictive control scheme without cost function for voltage source inverters with reduced common-mode voltage. Int. J. Electron. 2018, 105, 629–644. [Google Scholar] [CrossRef]
- Wang, S.; Song, W.; Ma, J.; Zhao, J.; Feng, X. Study on Comprehensive Analysis and Compensation for the Line Current Distortion in Single-Phase Three-Level NPC Converters. IEEE Trans. Ind. Electron. 2018, 65, 2199–2211. [Google Scholar] [CrossRef]
- Han, P.; He, X.; Ren, H.; Wang, Y.; Peng, X.; Shu, Z.; Gao, S.; Wang, Y.; Chen, Z. Fault Diagnosis and System Reconfiguration Strategy of Single-phase Three Level Neutral-Point-Clamped Cascaded Inverter. IEEE Trans. Ind. Appl. 2019, 55, 3863–3876. [Google Scholar] [CrossRef]
- Wang, S.; Song, W.; Zhao, J.; Feng, X. Hybrid single-carrier-based pulse width modulation scheme for single-phase three-level neutral-point-clamped grid-side converters in electric railway traction. IET Power Electron. 2016, 9, 2500–2509. [Google Scholar] [CrossRef]
- Lee, J.-S.; Kwak, R.; Lee, K.-B. Novel Discontinuous PWM Method for a Single-Phase Three-Level Neutral Point Clamped Inverter with Efficiency Improvement and Harmonic Reduction. IEEE Trans. Power Electron. 2018, 33, 9253–9266. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Operating Status | Switching State | Input Voltage | Capacitor Voltage | |||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 0 | 0 | OFF | ON | OFF | ON | 0 | - | - |
| 2 | 1 | 1 | ON | ON | ON | ON | 0 | - | - |
| 3 | −1 | −1 | OFF | OFF | OFF | OFF | 0 | - | - |
| 4 | 1 | −1 | ON | ON | OFF | OFF | ↑ | ↑ | |
| 5 | 1 | 0 | ON | ON | OFF | ON | ↑ | ↓ | |
| 6 | 0 | −1 | OFF | ON | OFF | OFF | ↓ | ↑ | |
| 7 | 0 | 1 | OFF | ON | ON | ON | ↑ | ↓ | |
| 8 | −1 | 0 | OFF | OFF | OFF | ON | ↓ | ↑ | |
| 9 | −1 | 1 | OFF | OFF | ON | ON | ↓ | ↓ | |
| 1 | 0 | 1 | (+) | (+) |
| −1 | 0 | 1 | (−) | (−) |
| 0 | 1 | −1 | (−) | (+) |
| 0 | −1 | −1 | (+) | (−) |
| Conventional Method | Proposed Method | |
|---|---|---|
| Computational time (µs) | 5.262 | 5.263 |
| Criteria | Conventional Method | Proposed Method | |
|---|---|---|---|
| Weighting Factor Tuning Procedure | Yes | No | |
| Steady-state performance | Source current THD (%) | 2.99 | 2.89 (slightly better) |
| Capacitor voltage balancing | Good | Good | |
| Transient-state performance | Capacitor voltages balancing speed | Fast | Fast |
| Reference tracking | Fast | Fast | |
| Overshoot | No | No | |
| Computational time (µs) | 5.262 | 5.263 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jun, E.-S.; Nguyen, M.H.; Kwak, S. Model Predictive Control Method Based on Deterministic Reference Voltage for Single-Phase Three-Level NPC Converters. Appl. Sci. 2020, 10, 8840. https://doi.org/10.3390/app10248840
Jun E-S, Nguyen MH, Kwak S. Model Predictive Control Method Based on Deterministic Reference Voltage for Single-Phase Three-Level NPC Converters. Applied Sciences. 2020; 10(24):8840. https://doi.org/10.3390/app10248840
Chicago/Turabian StyleJun, Eun-Su, Minh Hoang Nguyen, and Sangshin Kwak. 2020. "Model Predictive Control Method Based on Deterministic Reference Voltage for Single-Phase Three-Level NPC Converters" Applied Sciences 10, no. 24: 8840. https://doi.org/10.3390/app10248840
APA StyleJun, E. -S., Nguyen, M. H., & Kwak, S. (2020). Model Predictive Control Method Based on Deterministic Reference Voltage for Single-Phase Three-Level NPC Converters. Applied Sciences, 10(24), 8840. https://doi.org/10.3390/app10248840