Robust Resonant Controllers for Distributed Energy Resources in Microgrids

 ,
, 
 ,
, 

Abstract
:1. Introduction
2. Mathematical Modeling of DER System
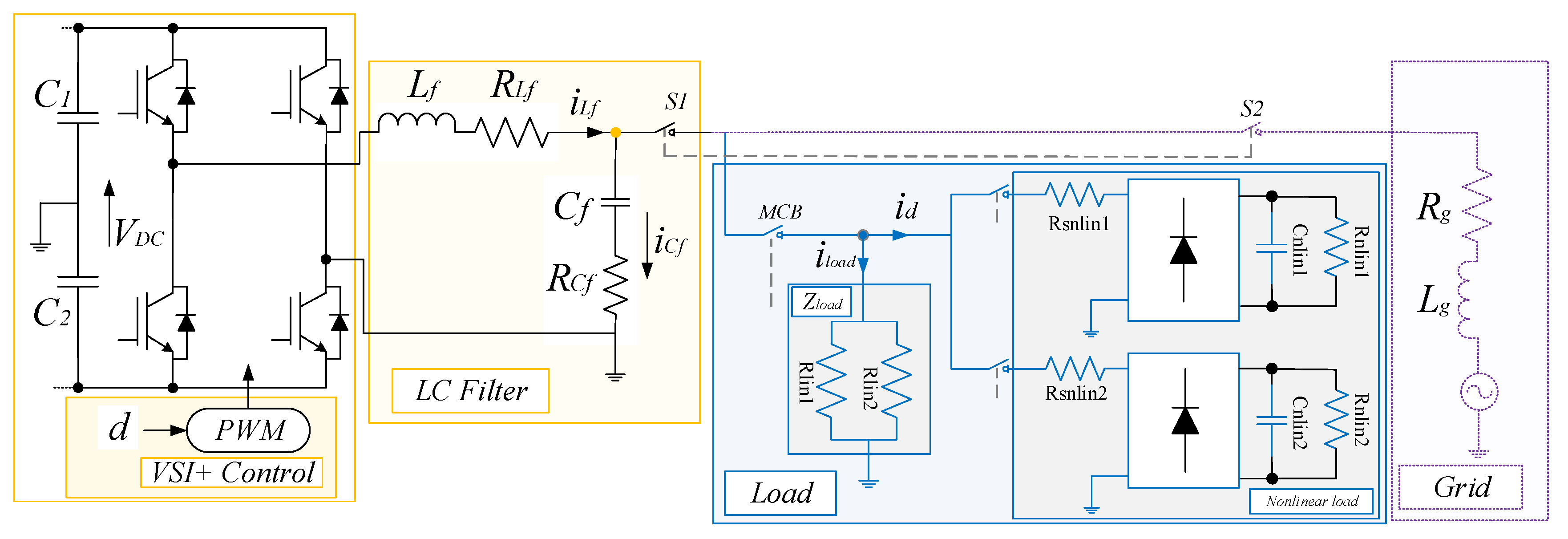
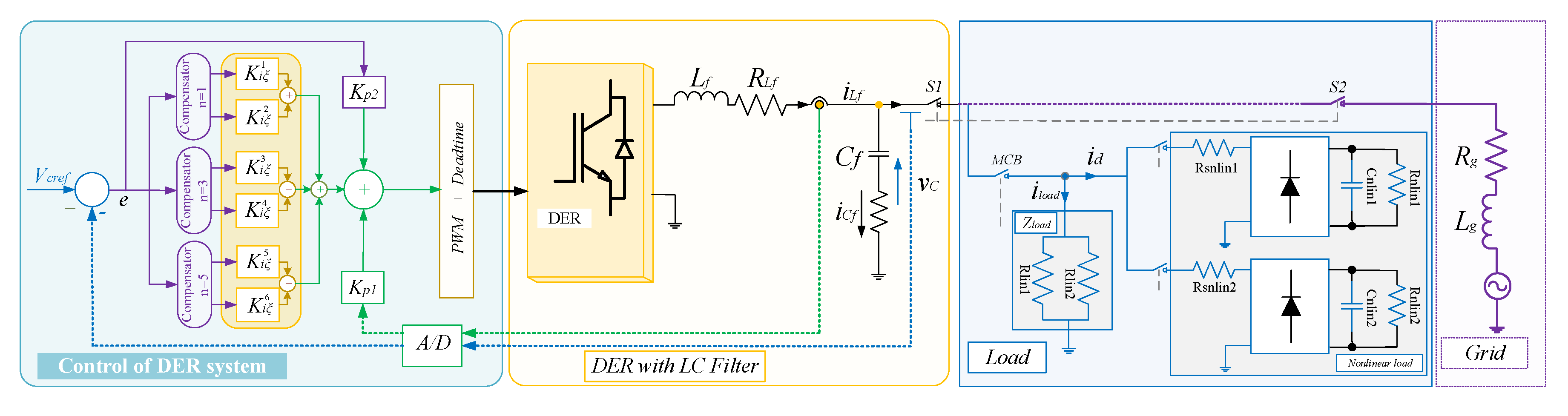
2.1. System Description
2.2. Linear Load Model Considerations
- Considers the admittance as a time-varying parameter, where only the admittance values are known considering the two generic DER operating regimes: empty operation (minimum admittance) and nominal (maximum admittance).
- Considers current disturbances such as: sags, swell, notch or peak currents among other disturbances, and are modeled by the disturbance current [18]. The current is also an input to the DER system, but it is not controllable and its value will depend on the load, unlike the signal. In this way, the current is considered as a disturbance to the system and its presence is seen as a source of loss of system performance.
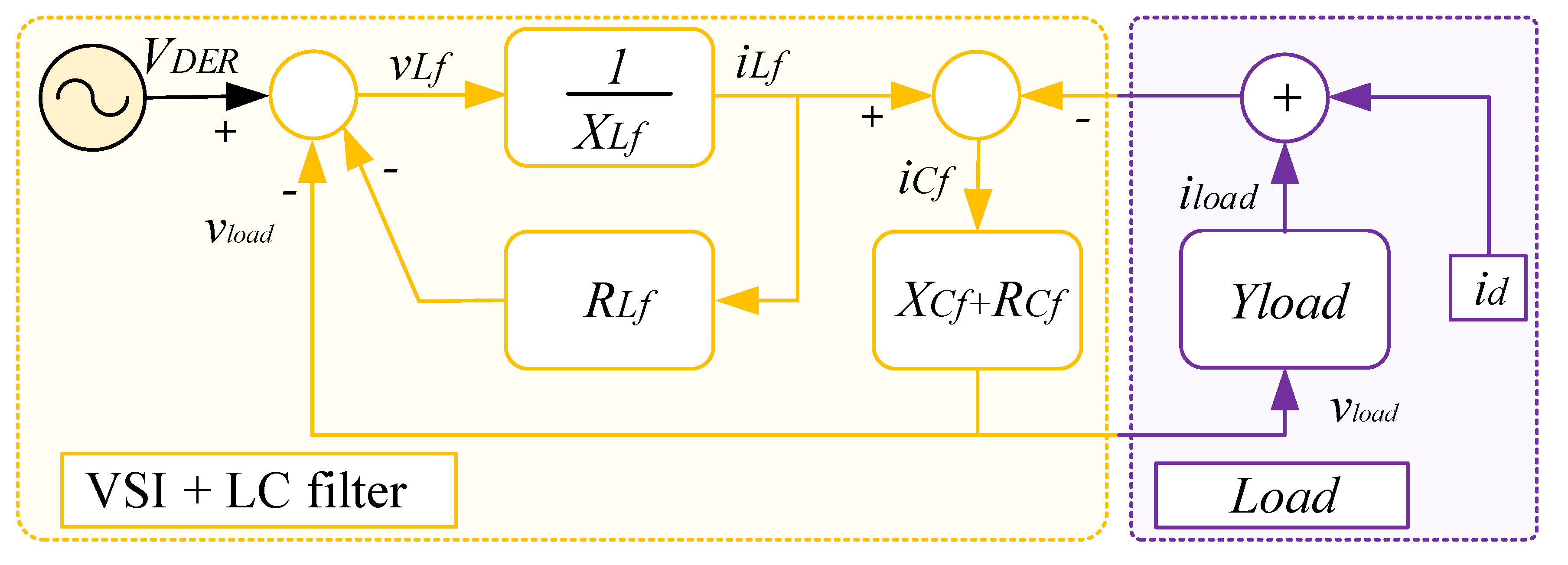
2.3. State Space Modelling of DER System
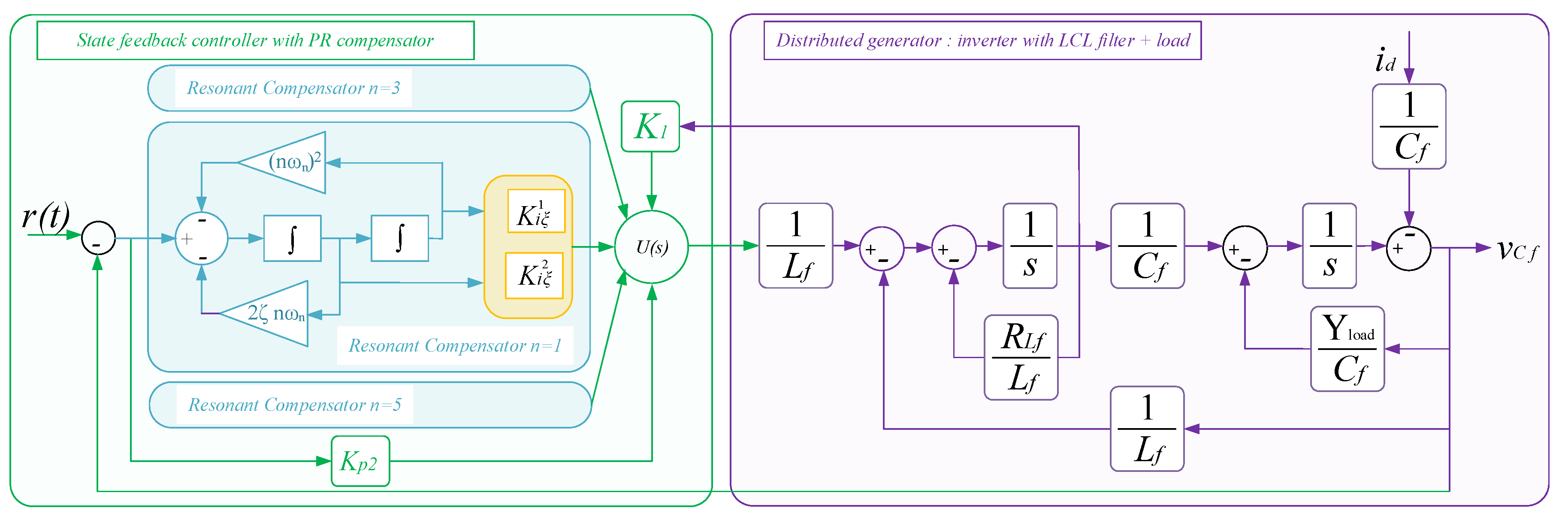
3. Proportional Resonant Controller Model
Controller Based on the Principle of the Internal
4. Robust Controller Design Based on LMIs
-Stability
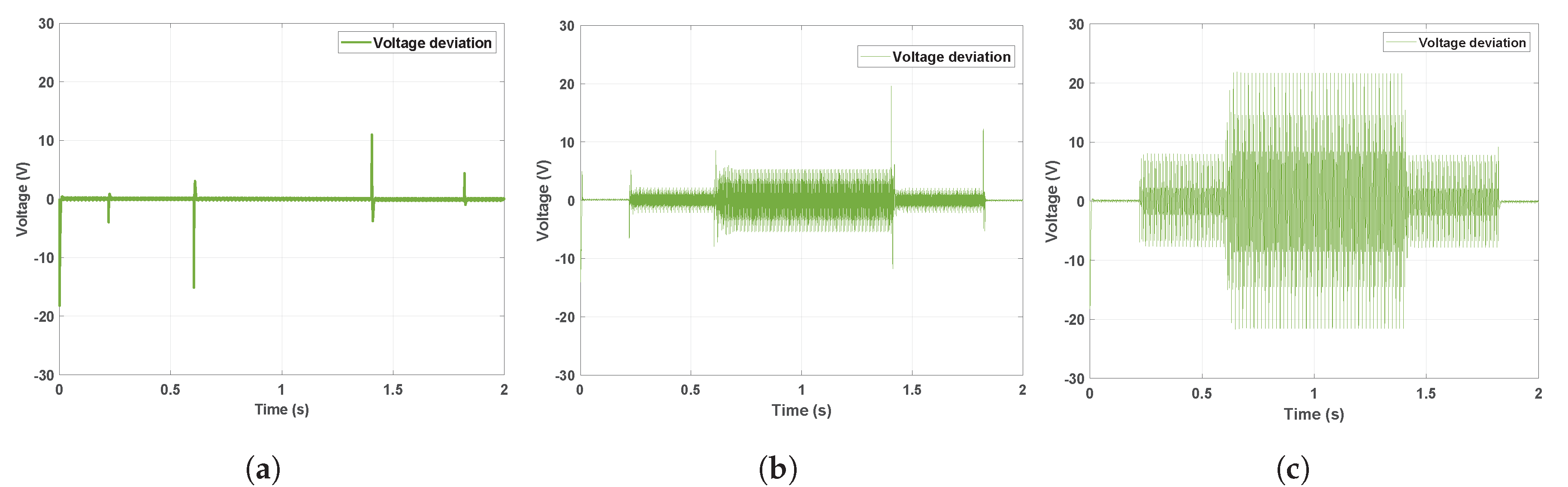
5. Simulation Results and Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zia, M.F.; Elbouchikhi, E.; Benbouzid, M.; Guerrero, J.M. Microgrid Transactive Energy Systems: A Perspective on Design, Technologies, and Energy Markets. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 5795–5800. [Google Scholar]
- Zia, M.F.; Benbouzid, M.; Elbouchikhi, E.; Muyeen, S.M.; Techato, K.; Guerrero, J.M. Microgrid Transactive Energy: Review, Architectures, Distributed Ledger Technologies, and Market Analysis. IEEE Access 2020, 8, 19410–19432. [Google Scholar] [CrossRef]
- Bouzid, A.M.; Chériti, A.; Sicard, P. H-infinity loopshaping controller design of micro-source inverters to improve the power quality. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 June 2014; pp. 2371–2378. [Google Scholar]
- Eltawil, M.A.; Zhao, Z. Grid-connected photovoltaic power systems: Technical and potential problems—A review. Renew. Sustain. Energy Rev. 2010, 14, 112–129. [Google Scholar] [CrossRef]
- Timbus, A.; Liserre, M.; Teodorescu, R.; Rodriguez, P.; Blaabjerg, F. Evaluation of current controllers for distributed power generation systems. IEEE Trans. Power Electron. 2009, 24, 654–664. [Google Scholar] [CrossRef]
- Bouzid, A.M.; Golsorkhi, M.S.; Sicard, P.; Chériti, A. H∞ structured design of a cascaded voltage/current controller for electronically interfaced distributed energy resources. In Proceedings of the 2015 Tenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 31 March–2 April 2015; pp. 1–6. [Google Scholar]
- Samavati, E.; Mohammadi, H. Simultaneous voltage and current harmonics compensation in islanded/grid-connected microgrids using virtual impedance concept. Sustain. Energy Grids Netw. 2019, 20, 100258. [Google Scholar] [CrossRef]
- Husev, O.; Roncero-Clemente, C.; Makovenko, E.; Pimentel, S.P.; Vinnikov, D.; Martins, J. Optimization and Implementation of the Proportional-Resonant Controller for Grid-Connected Inverter With Significant Computation Delay. IEEE Trans. Ind. Electron. 2020, 67, 1201–1211. [Google Scholar] [CrossRef]
- Osório, C.R.D.; Koch, G.G.; Pinheiro, H.; Oliveira, R.C.L.F.; Montagner, V.F. Robust Current Control of Grid-Tied Inverters Affected by LCL Filter Soft-Saturation. IEEE Trans. Ind. Electron. 2019, 67, 6550–6561. [Google Scholar] [CrossRef]
- Ye, T.; Dai, N.; Lam, C.; Wong, M.; Guerrero, J.M. Analysis, Design, and Implementation of a Quasi-Proportional-Resonant Controller for a Multifunctional Capacitive-Coupling Grid-Connected Inverter. IEEE Trans. Ind. Appl. 2016, 52, 4269–4280. [Google Scholar] [CrossRef]
- Khalfalla, H.; Ethni, S.; Al-Greer, M.; Pickert, V.; Armstrong, M.; Phan, V.T. An adaptive proportional resonant controller for single phase PV grid connected inverter based on band-pass filter technique. In Proceedings of the 2017 11th IEEE International Conference on Compatibility, Power Electronics and Power Engineering (CPE-POWERENG), Cadiz, Spain, 4–6 April 2017; pp. 436–441. [Google Scholar]
- Kumar, N.; Saha, T.K.; Dey, J. Control, implementation, and analysis of a dual two-level photovoltaic inverter based on modified proportional-resonant controller. IET Renew. Power Gener. 2018, 12, 598–604. [Google Scholar] [CrossRef]
- Saim, A.; Houari, A.; Guerrero, J.M.; Djerioui, A.; Machmoum, M.; Ahmed, M.A. Stability Analysis and Robust Damping of Multiresonances in Distributed-Generation-Based Islanded Microgrids. IEEE Trans. Ind. Electron. 2019, 66, 8958–8970. [Google Scholar] [CrossRef]
- Bouzid, A.E.M.; Sicard, P.; Chaoui, H.; Cheriti, A. Robust three degrees of freedom based on H∞ controller of voltage/current loops for DG unit in micro grids. IET Power Electron. 2019, 12, 1413–1424. [Google Scholar] [CrossRef]
- Bouzid, A.M.; Sicard, P.; Chériti, A.; Bouhamida, M. H∞ loopshaping controller design of micro-source inverters. In Proceedings of the 2014 IEEE 27th Canadian Conference on Electrical and Computer Engineering (CCECE), Toronto, ON, Canada, 4–7 May 2014; pp. 1–6. [Google Scholar]
- Zerrougui, M.; Darouach, M.; Boutat-Baddas, L.; Souley-Ali, H. H∞ filtering for singular bilinear systems with application to a single-link flexible-joint robot. Int. J. Control Autom. Syst. 2014, 12, 590–598. [Google Scholar] [CrossRef]
- Zemouche, A.; Zerrougui, M.; Boulkroune, B.; Rajamani, R.; Zasadzinski, M. A new LMI observer-based controller design method for discrete-time LPV systems with uncertain parameters. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 2802–2807. [Google Scholar]
- Thirumala, K.; Pal, S.; Jain, T.; Umarikar, A.C. A classification method for multiple power quality disturbances using EWT based adaptive filtering and multiclass SVM. Neurocomputing 2019, 334, 265–274. [Google Scholar] [CrossRef]
- Bouzid, A.M.; Sicard, P.; Paquin, J.; Yamane, A. A robust control strategy for parallel-connected distributed generation using real-time simulation. In Proceedings of the 2016 IEEE 7th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Vancouver, BC, Canada, 27–30 June 2016; pp. 1–8. [Google Scholar]
- Bouzid, A.E.M.; Sicard, P.; Chaoui, H.; Cheriti, A.; Sechilariu, M.; Guerrero, J.M. A novel decoupled trigonometric saturated droop controller for power sharing in islanded low-voltage microgrids. Electr. Power Syst. Res. 2019, 168, 146–161. [Google Scholar] [CrossRef]
- Fukuda, S.; Yoda, T. A novel current-tracking method for active filters based on a sinusoidal internal model [for PWM invertors]. IEEE Trans. Ind. Appl. 2001, 37, 888–895. [Google Scholar] [CrossRef] [Green Version]
- Francis, B.A.; Wonham, W.M. The internal model principle for linear multivariable regulators. Appl. Math. Optim. 1975, 2, 170–194. [Google Scholar] [CrossRef]
- Zmood, D.N.; Holmes, D.G. Stationary frame current regulation of PWM inverters with zero steady-state error. IEEE Trans. Power Electron. 2003, 18, 814–822. [Google Scholar] [CrossRef]
- Teodorescu, R.; Blaabjerg, F.; Liserre, M.; Loh, P.C. Proportional-resonant controllers and filters for grid-connected voltage-source converters. IEE Proc. Electr. Power Appl. 2006, 153, 750–762. [Google Scholar] [CrossRef] [Green Version]
- Pereira, L.F.A.; Flores, J.V.; Bonan, G.; Coutinho, D.F.; da Silva, J.M.G. Multiple resonant controllers for uninterruptible power supplies—A systematic robust control design approach. IEEE Trans. Ind. Electron. 2013, 61, 1528–1538. [Google Scholar] [CrossRef]
- Callier, F.M.; Desoer, C.A. Linear System Theory; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar]
- Maccari, L.A.; Massing, J.R.; Schuch, L.; Rech, C.; Pinheiro, H.; Oliveira, R.C.L.F.; Montagner, V.F. LMI-Based Control for Grid-Connected Converters With LCL Filters Under Uncertain Parameters. IEEE Trans. Power Electron. 2014, 29, 3776–3785. [Google Scholar] [CrossRef]
- Chilali, M.; Gahinet, P.; Apkarian, P. Robust pole placement in LMI regions. IEEE Trans. Autom. Control 1999, 44, 2257–2270. [Google Scholar] [CrossRef] [Green Version]
- Gahinet, P. H∞ Design with Pole Placement Constraints: An LMI approach. IEEE Trans. Autom. Control 1996, 45, 358–367. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Nominal power | |
| RMS output voltage | |
| Frequency | |
| Output power factor | |
| Inductance | |
| Parasitic resistance of the inductor | |
| Capacitance | |
| Capacitive parasitic resistance (considered) | |
| Uncertain linear load impedance | |
| DC bus capacitances | |
| DC bus voltage | |
| Load parameters | |
| , |
| Parameter | Value |
|---|---|
| (Sigma position) | 100 |
| (radius of the circle) | 20,000 |
| c (center of circle) | 0 |
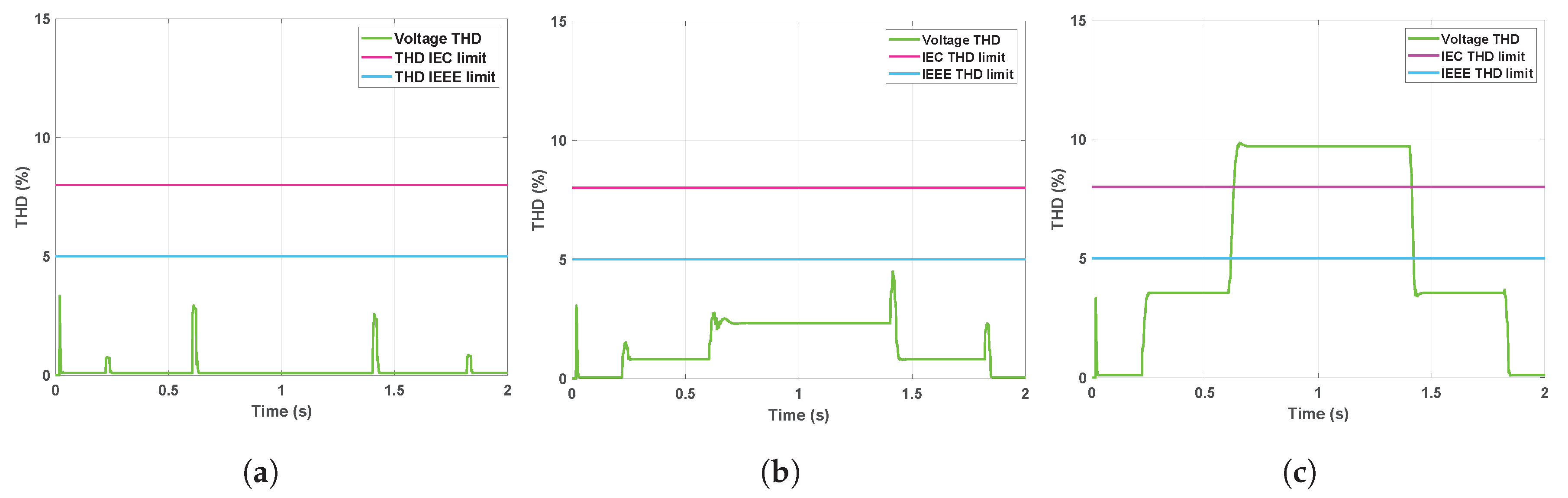
| Operation Mode | Empty | Load 20% | Load 100% |
|---|---|---|---|
| Linear load | 0.09% | 0.088% | 0.087% |
| Non-linear load with HC | 0.062% | 0.8107% | 2.328% |
| Non-linear load without HC | 0.12% | 3.547% | 9.71% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bouzid, A.E.M.; Zerrougui, M.; Ben Elghali, S.; Beddiar, K.; Benbouzid, M. Robust Resonant Controllers for Distributed Energy Resources in Microgrids. Appl. Sci. 2020, 10, 8905. https://doi.org/10.3390/app10248905
Bouzid AEM, Zerrougui M, Ben Elghali S, Beddiar K, Benbouzid M. Robust Resonant Controllers for Distributed Energy Resources in Microgrids. Applied Sciences. 2020; 10(24):8905. https://doi.org/10.3390/app10248905
Chicago/Turabian StyleBouzid, Allal El Moubarek, Mohamed Zerrougui, Seifeddine Ben Elghali, Karim Beddiar, and Mohamed Benbouzid. 2020. "Robust Resonant Controllers for Distributed Energy Resources in Microgrids" Applied Sciences 10, no. 24: 8905. https://doi.org/10.3390/app10248905
APA StyleBouzid, A. E. M., Zerrougui, M., Ben Elghali, S., Beddiar, K., & Benbouzid, M. (2020). Robust Resonant Controllers for Distributed Energy Resources in Microgrids. Applied Sciences, 10(24), 8905. https://doi.org/10.3390/app10248905