Rotational Speed Control Using ANN-Based MPPT for OWC Based on Surface Elevation Measurements





Abstract
:1. Introduction
2. Theoretical Considerations
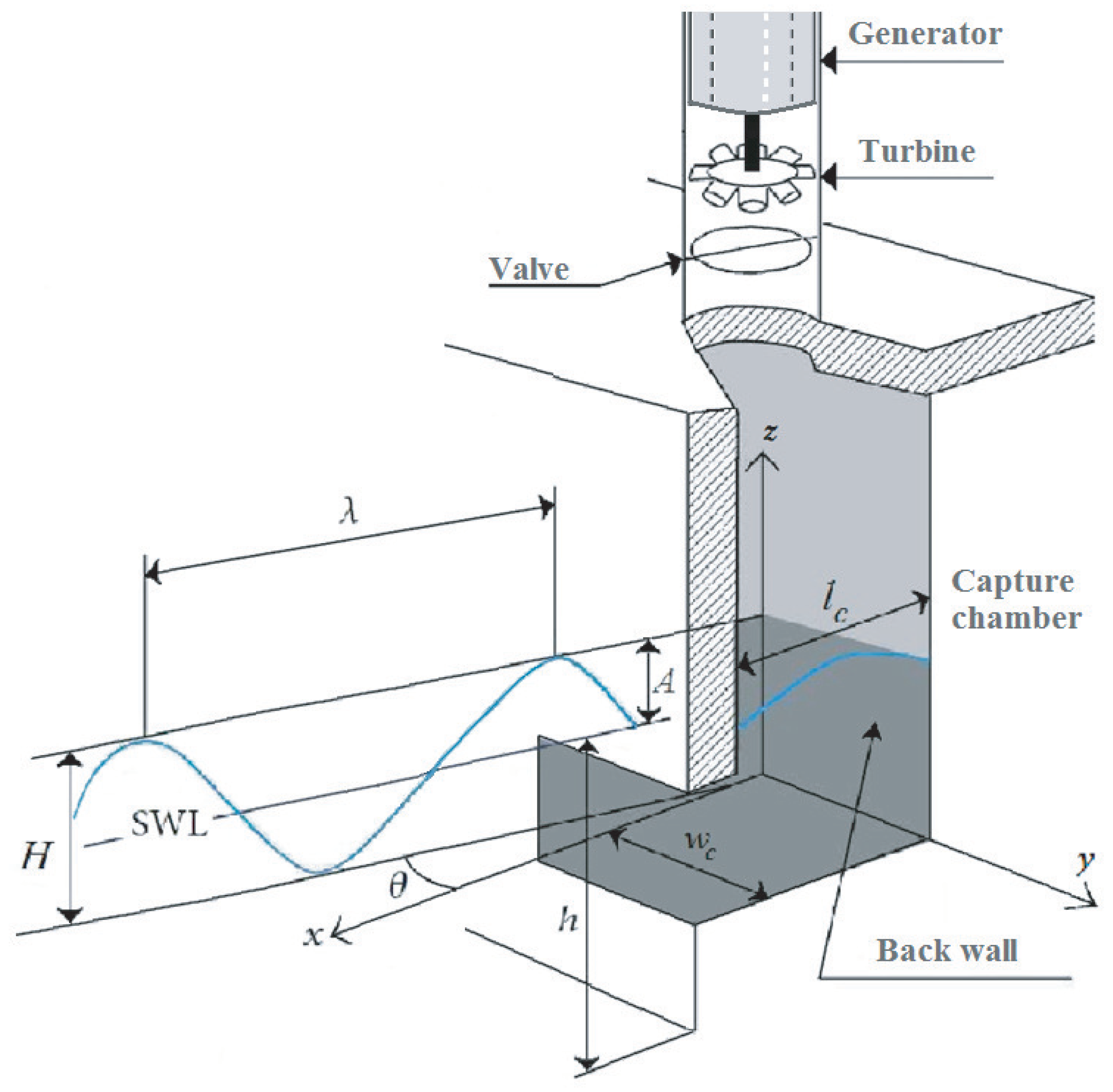
2.1. Wave Surface Dynamics
2.2. Capture Chamber Model
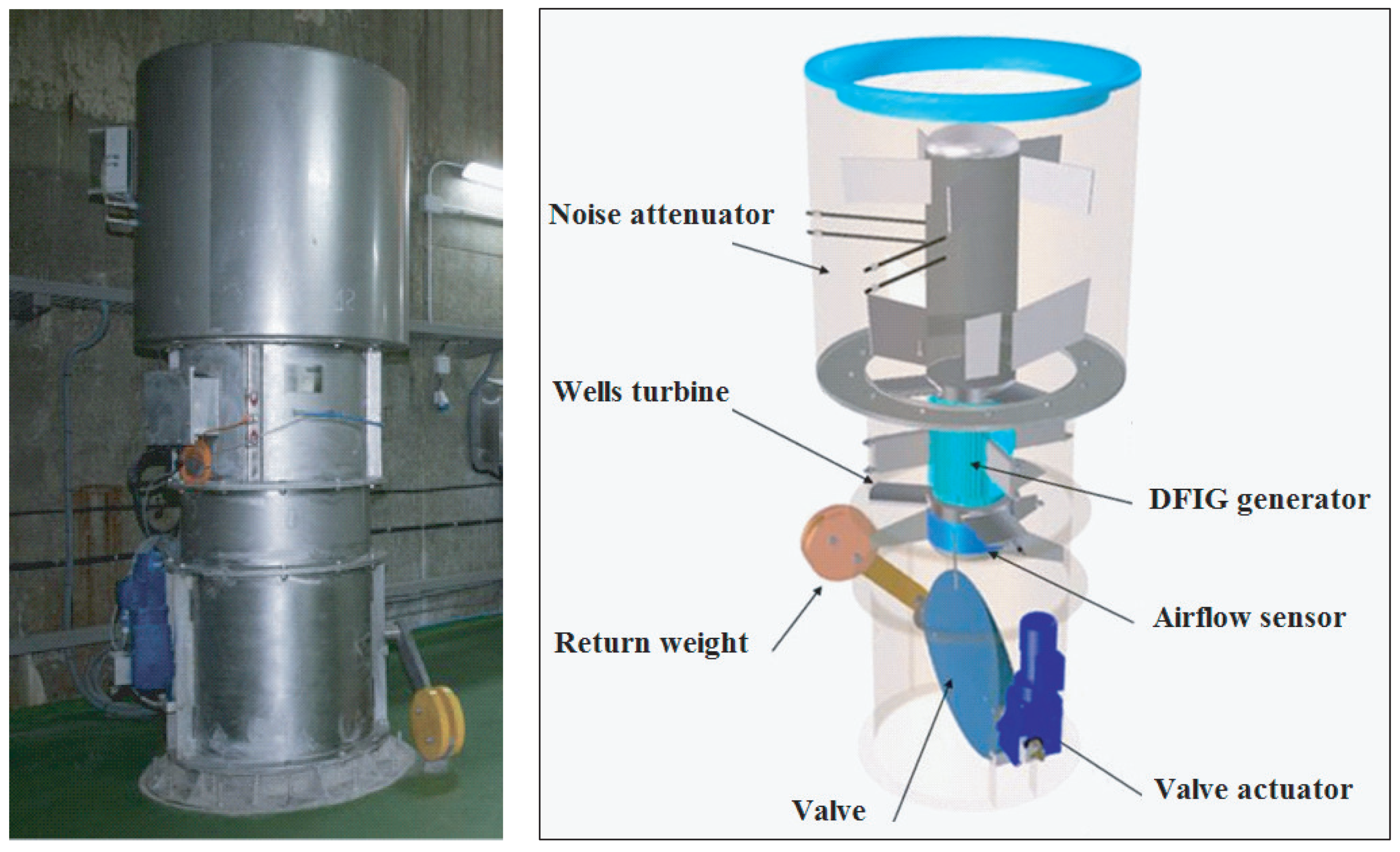
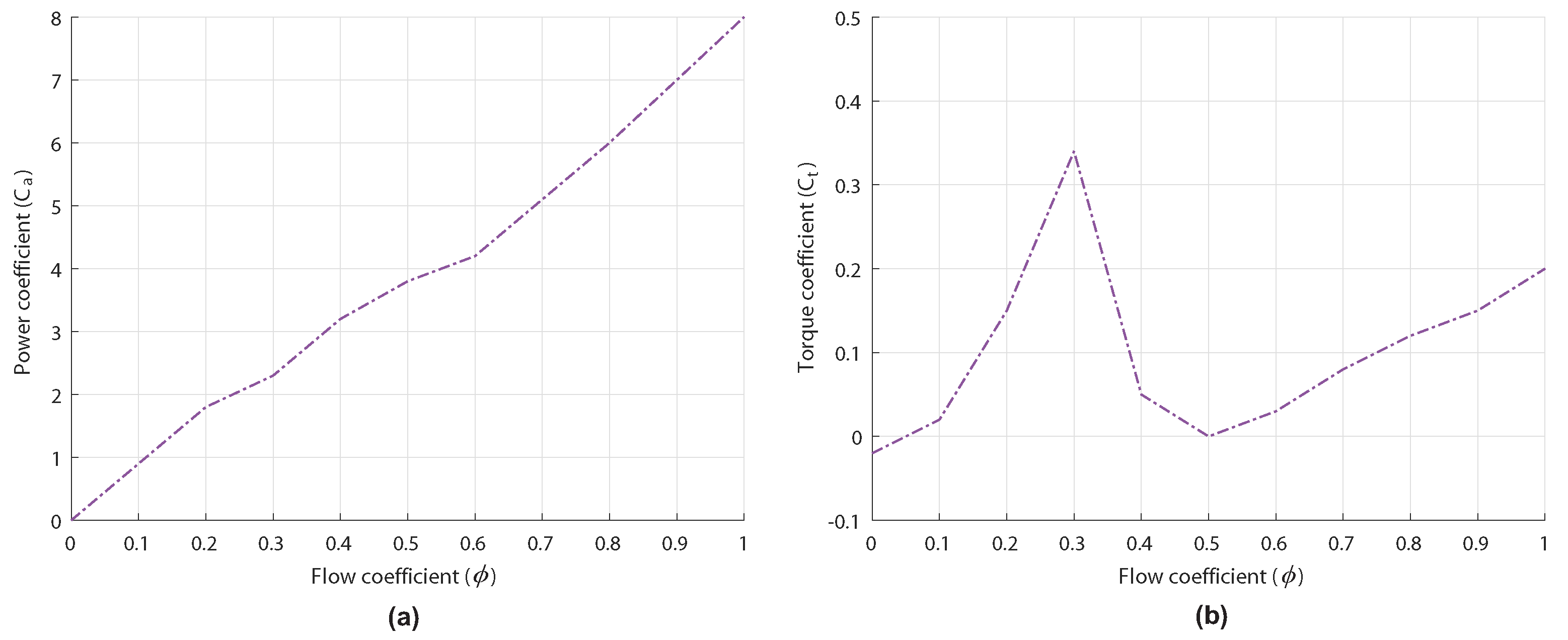
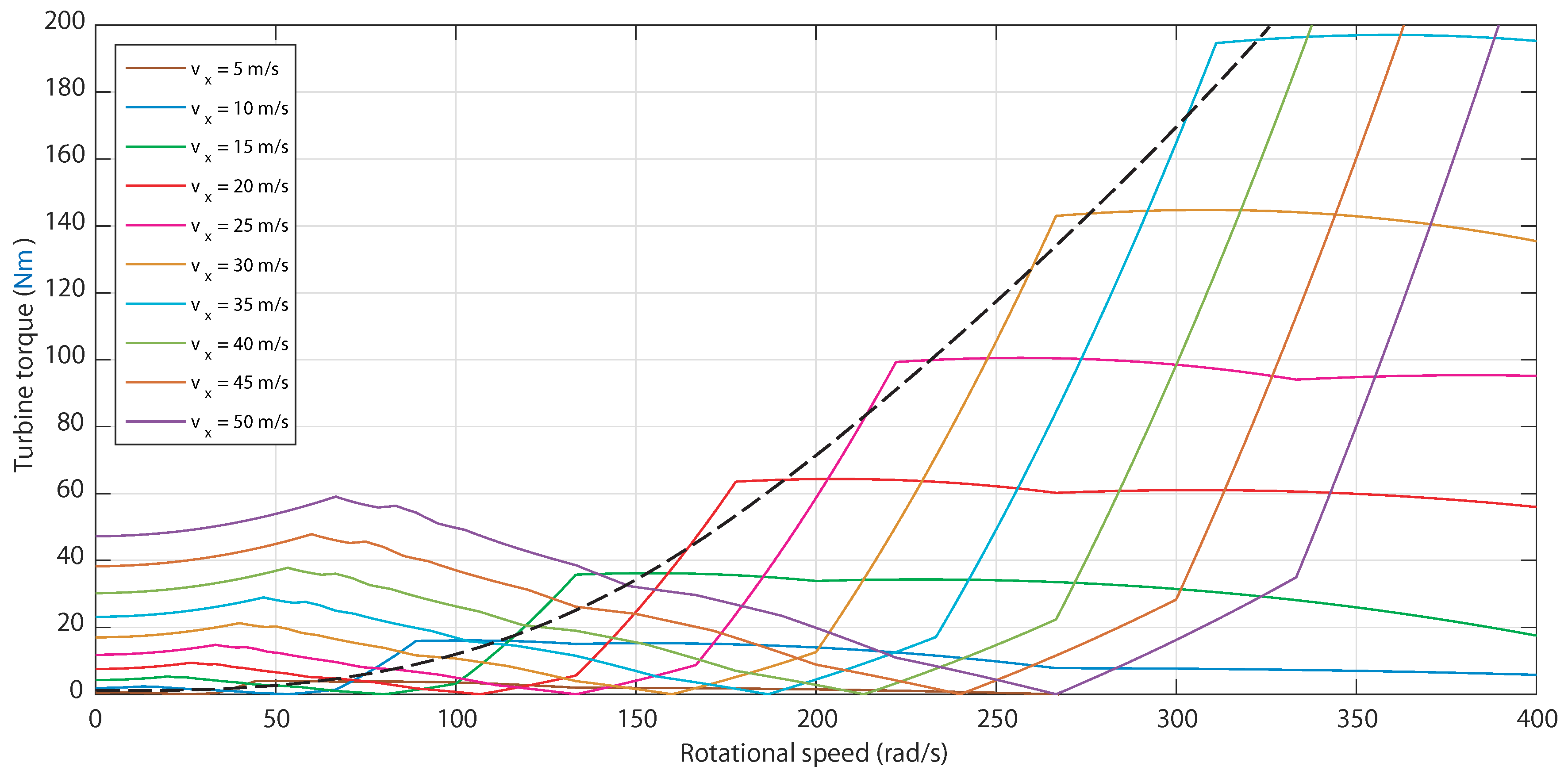
2.3. Wells Turbine Model
2.4. Doubly Fed Induction Generator Model
2.5. Back-to-Back Converter Model
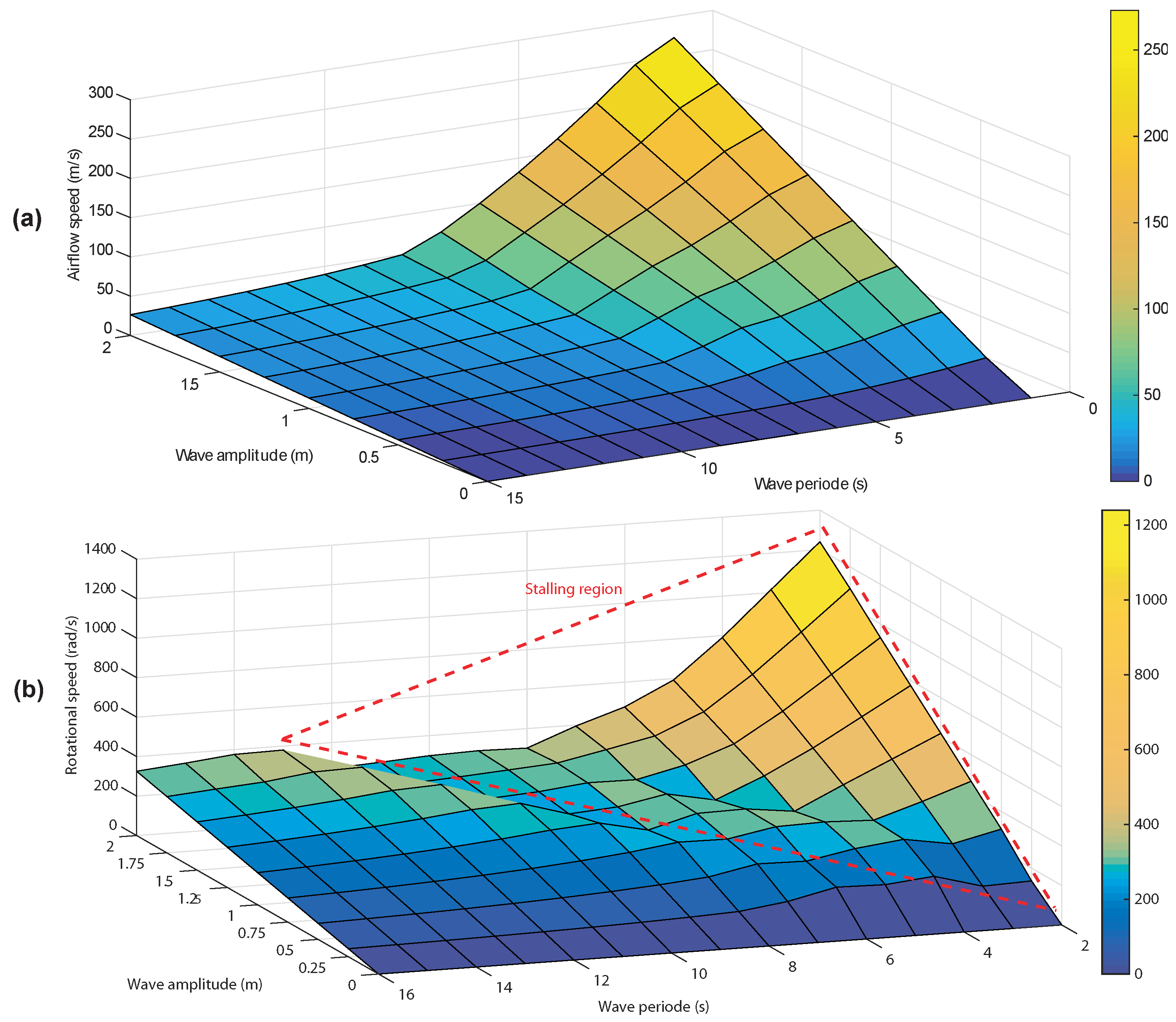
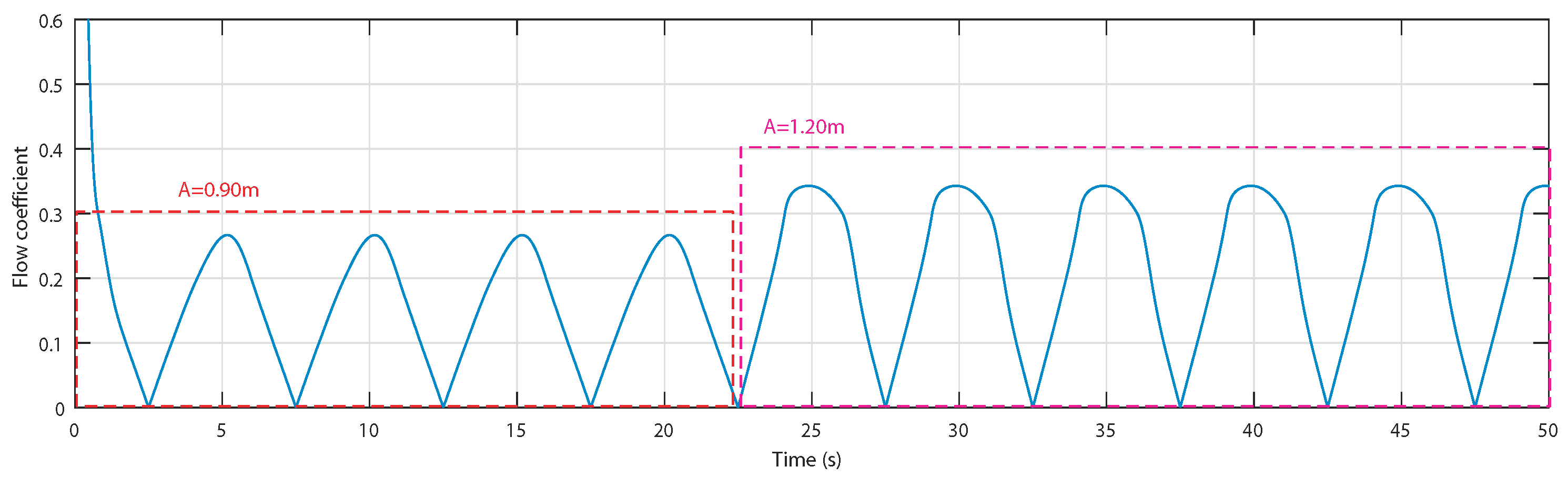
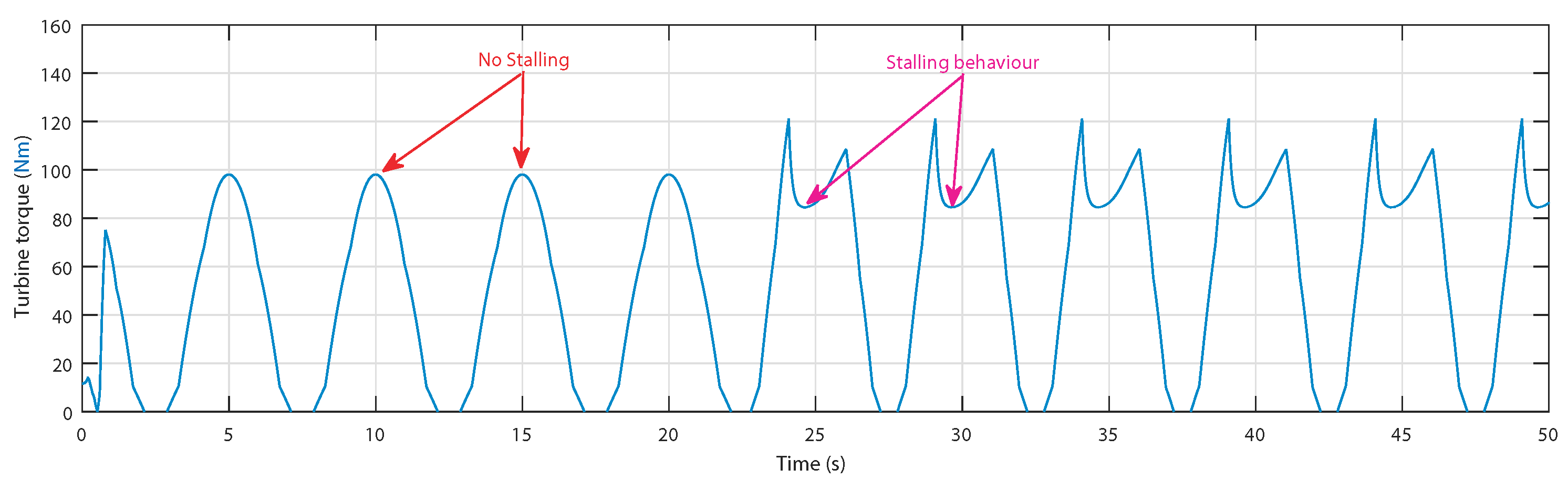
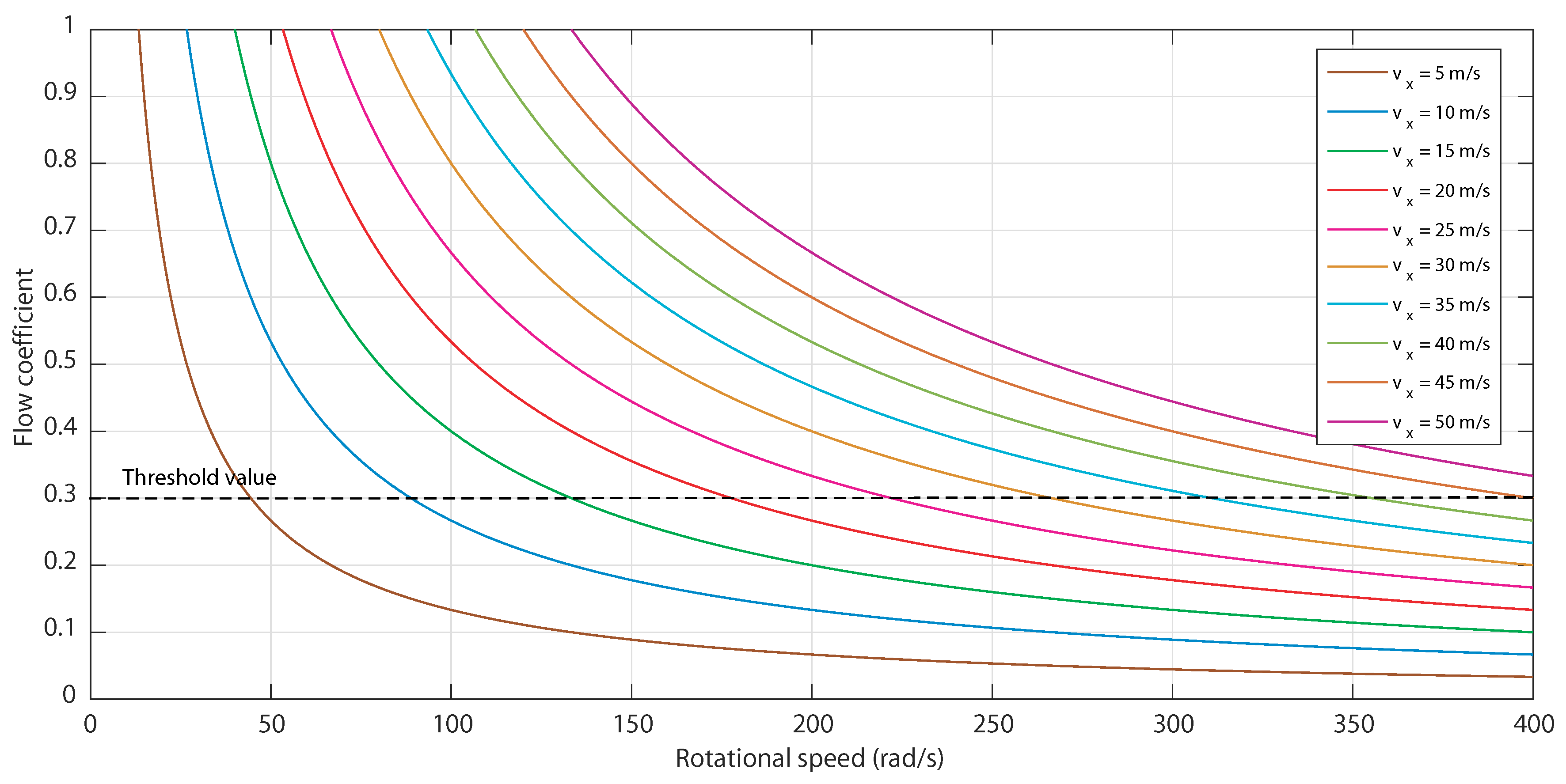
2.6. Stalling Phenomenon
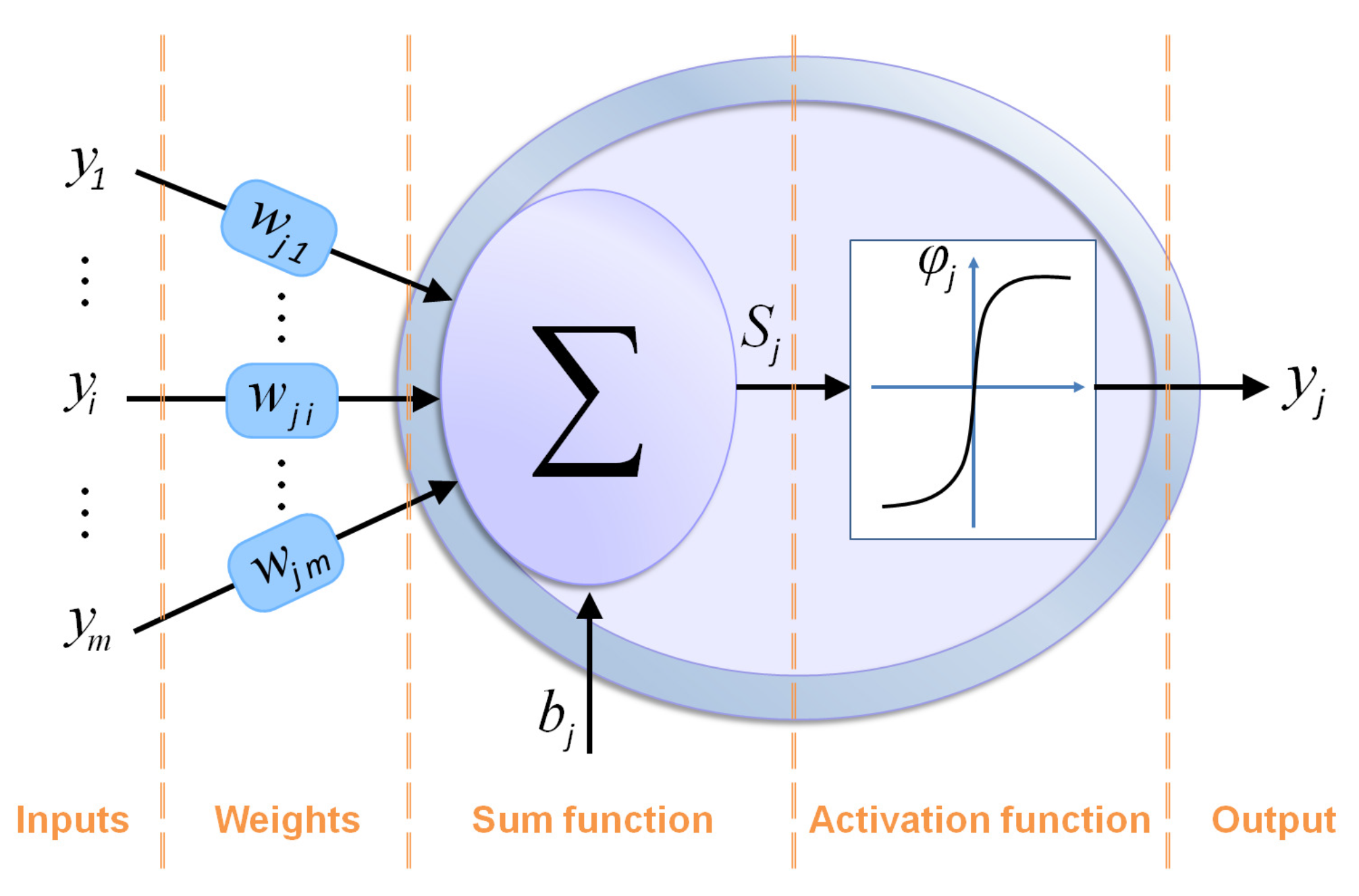
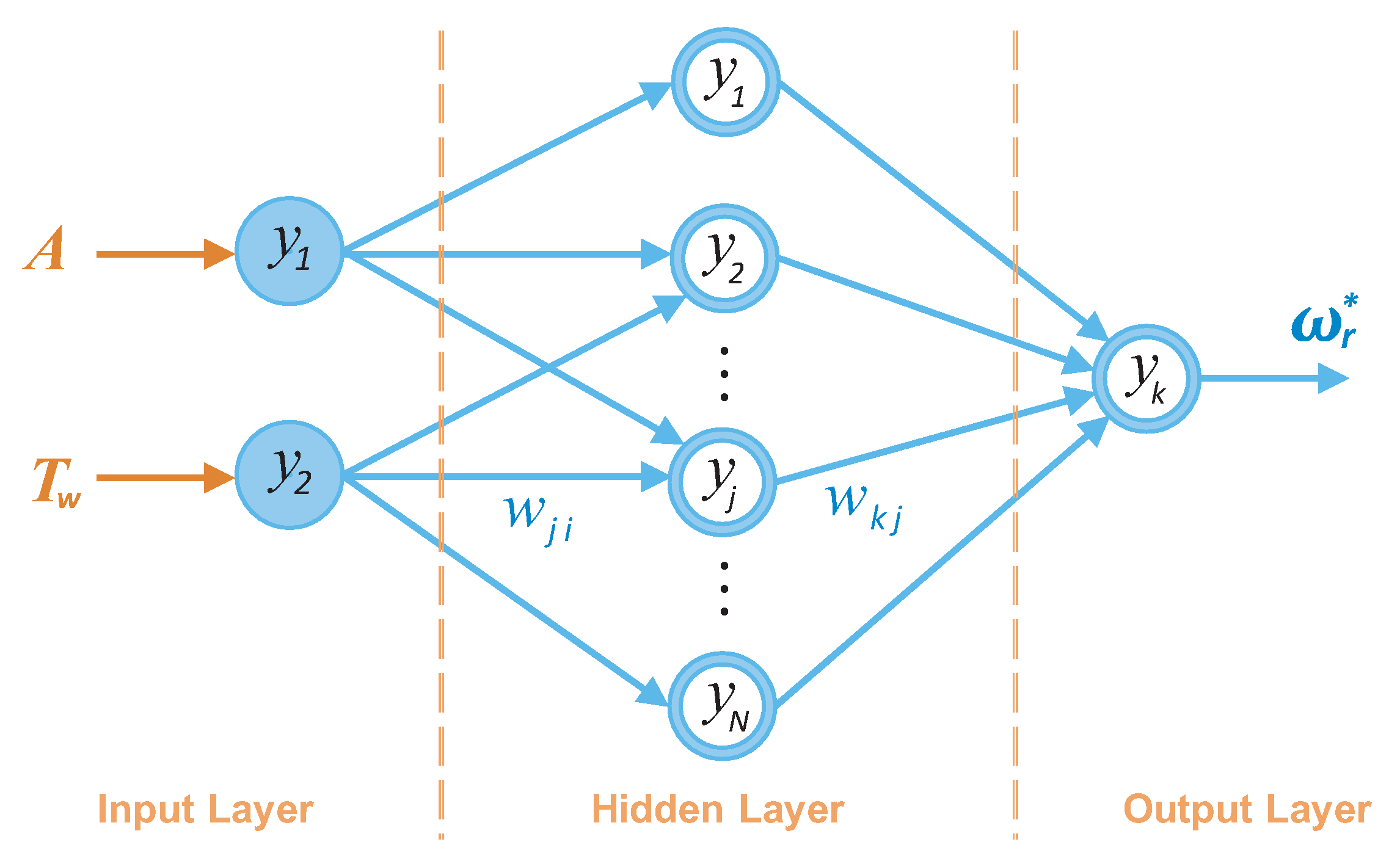
2.7. Artificial Neural Networks
3. Materials and Methods
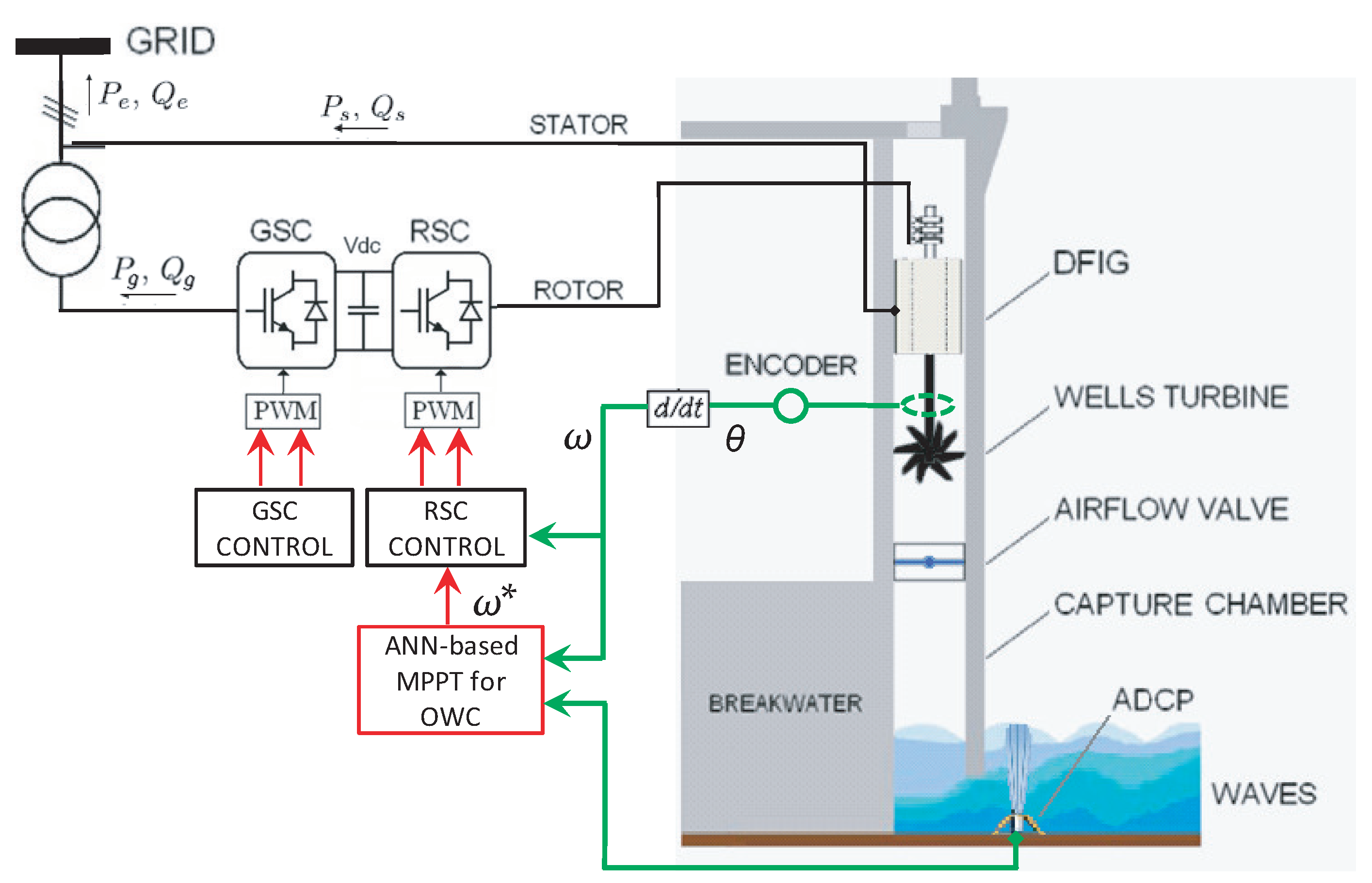
3.1. Proposed ANN-Based Rotational Speed Control
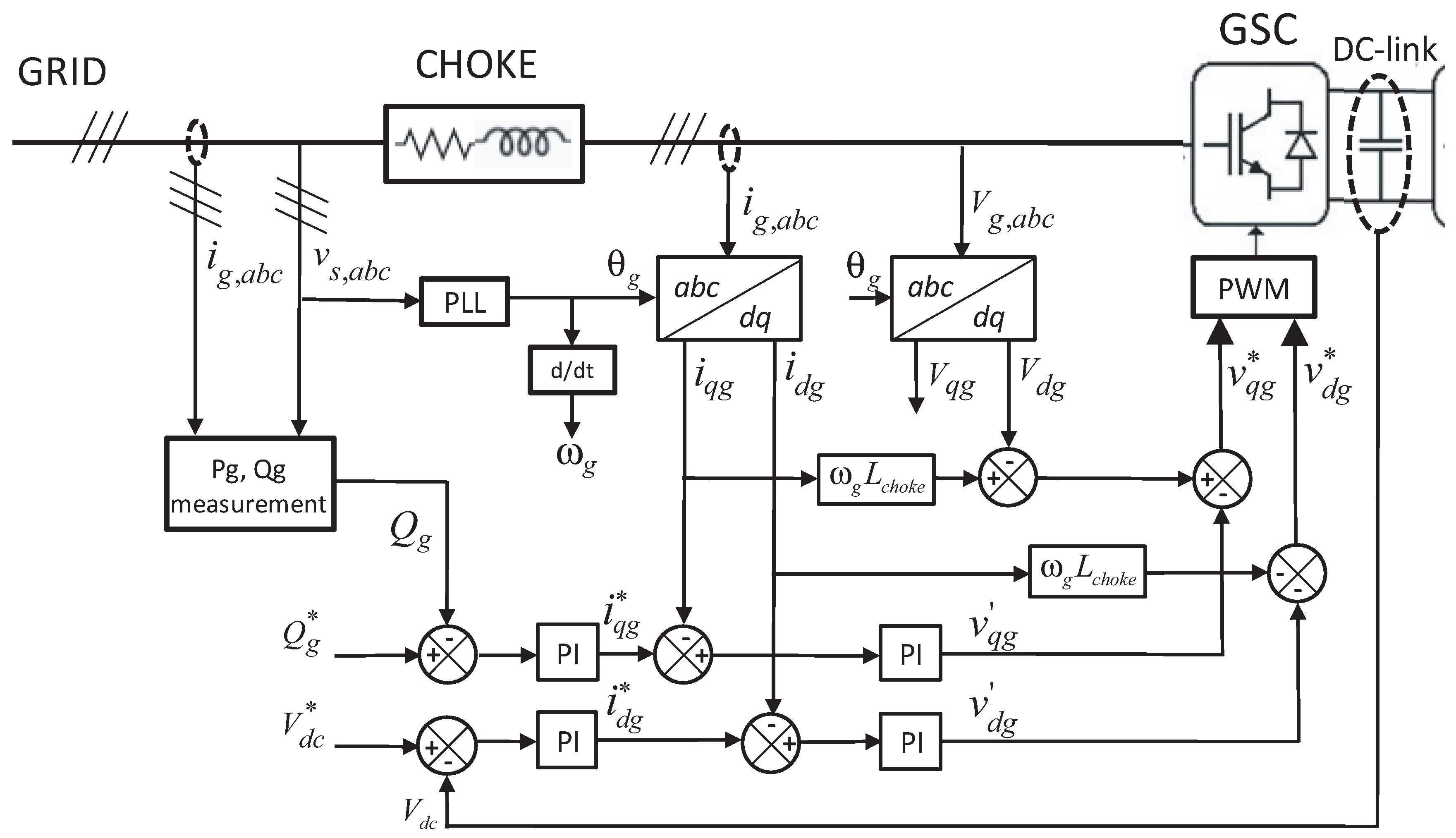
3.1.1. Grid-Side Converter Control
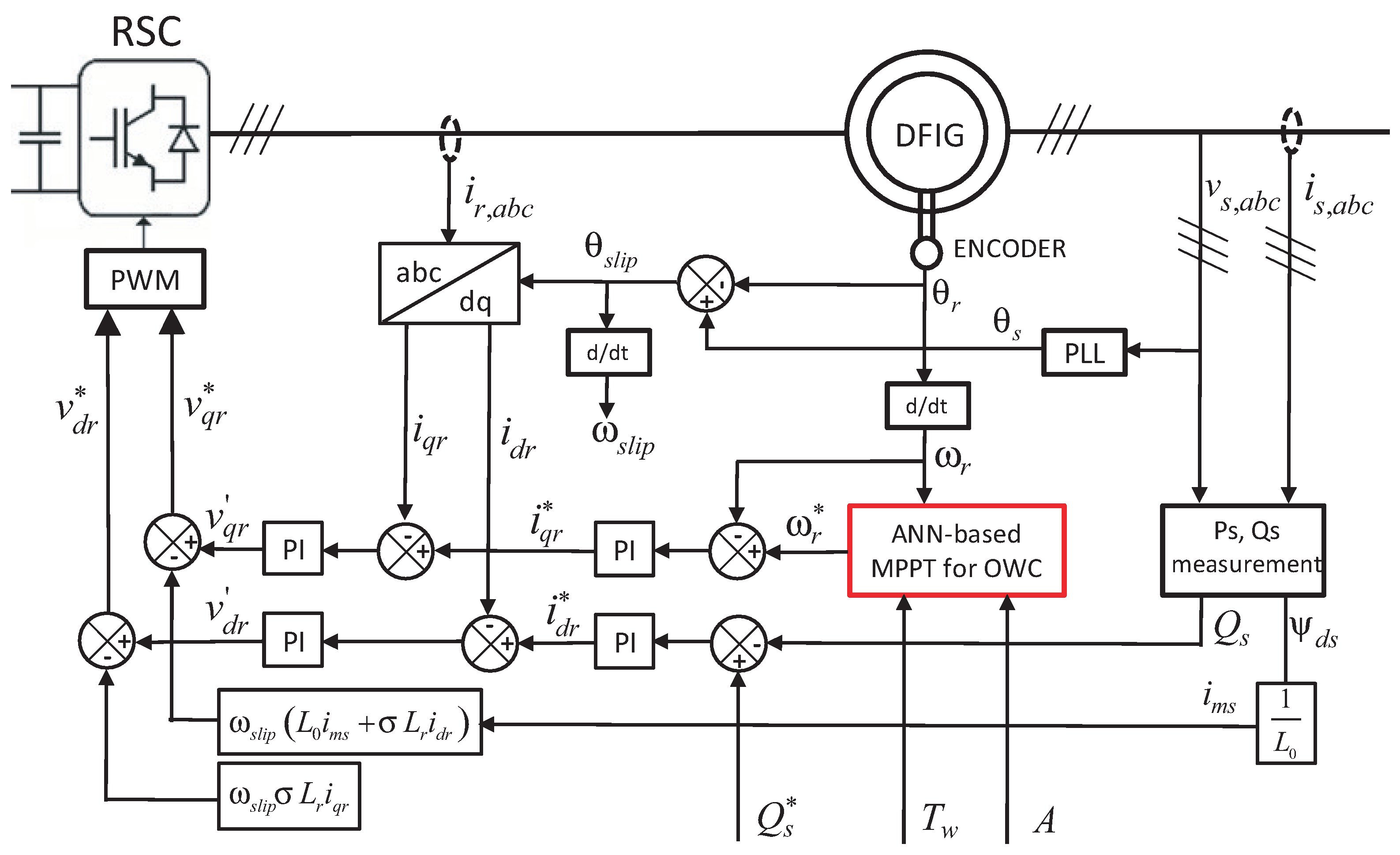
3.1.2. Rotor-Side ANN Rotational Speed Control
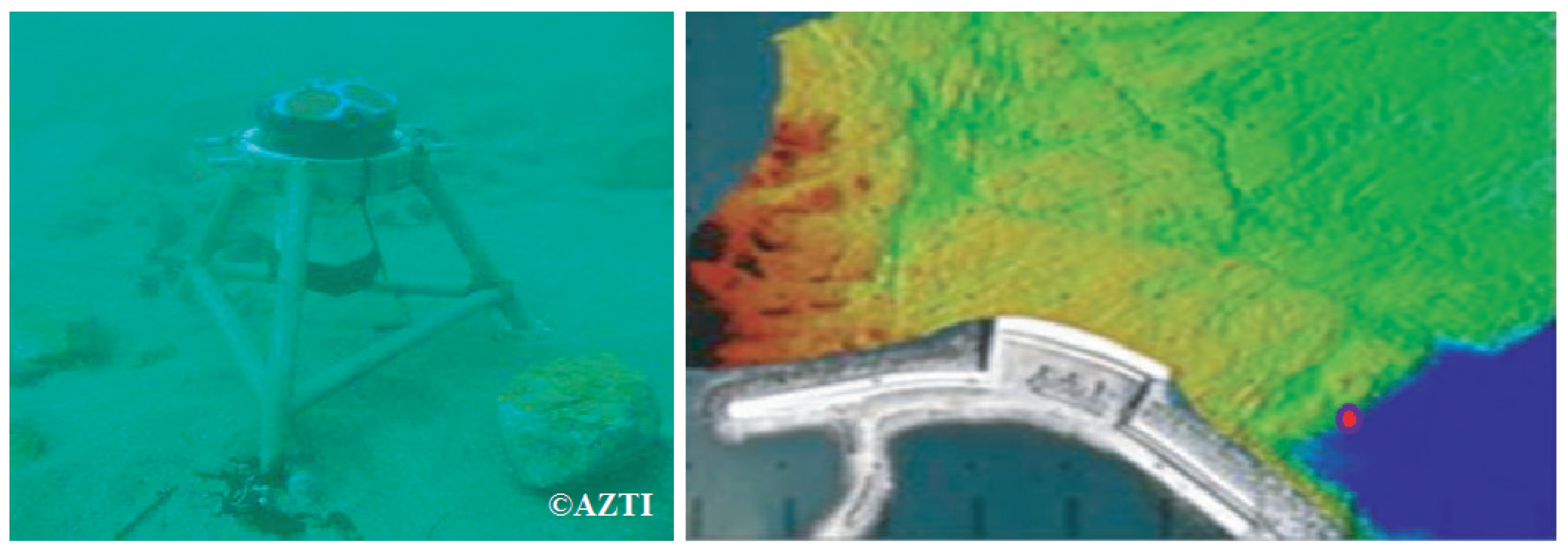
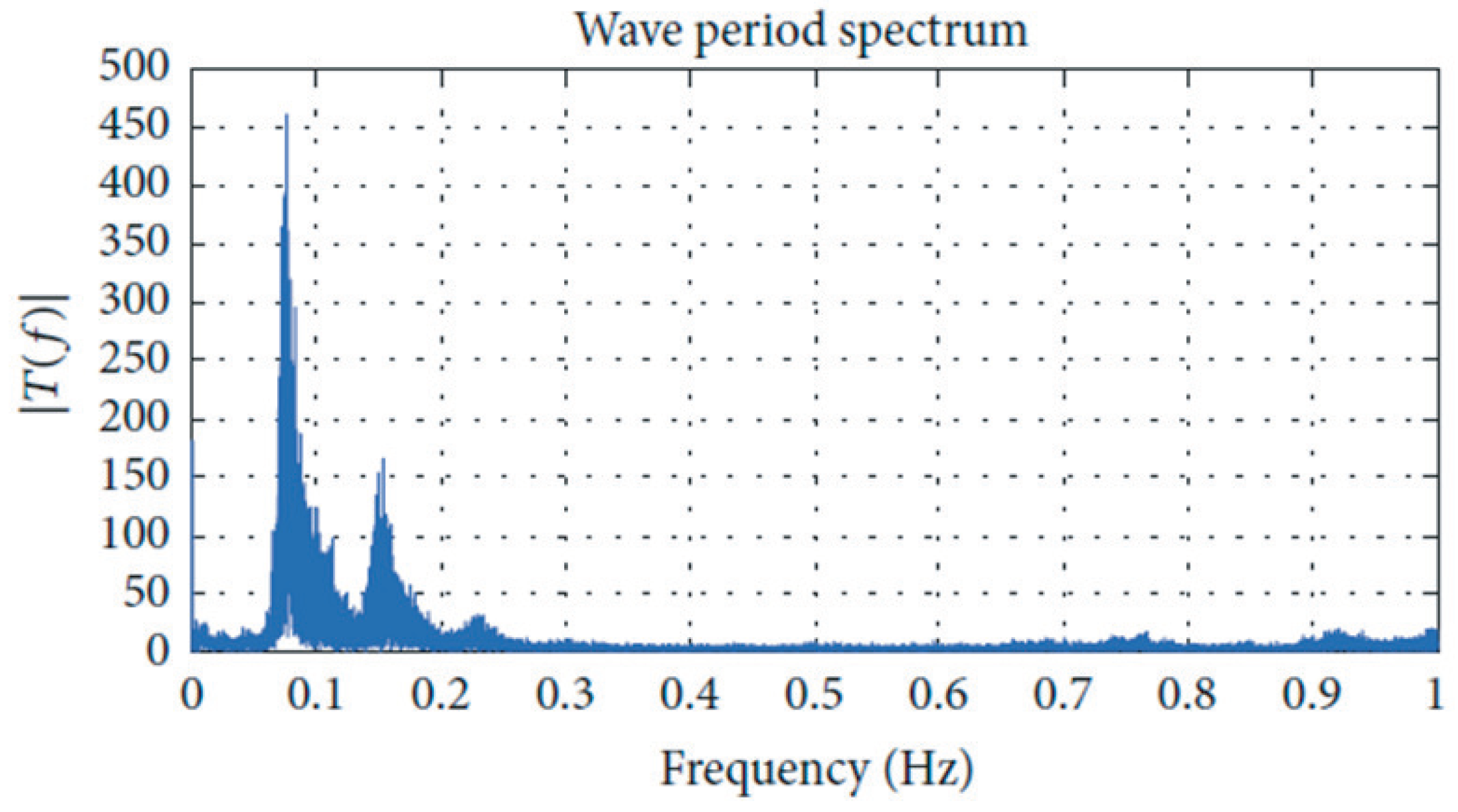
3.2. Gathering Wave Data
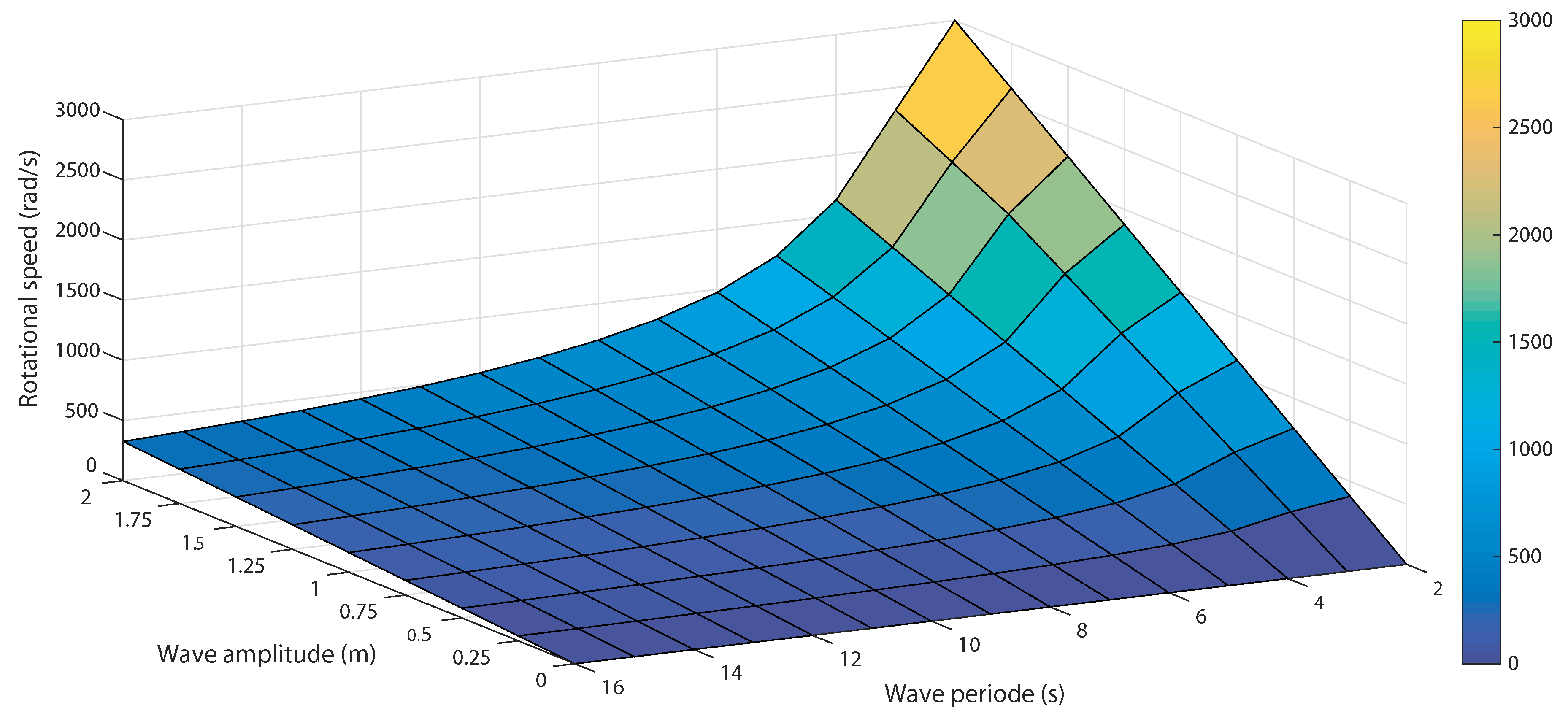
3.3. ANN-Based MPPT Design
3.4. ANN Training Process
| Algorithm 1: Levenberg–Marquardt Algorithm (LMA) |
| 1. Initialize training parameters: , , , , , . |
| 2. Initialize weights vector with small random numbers. |
| 3. Calculate error and performance index F using Equation (35). |
| 4. Calculate Jacobian matrix J and Hessian matrix H using Equations (37) and (38). |
| 5. Calculate weight corrections using Equation (34). |
| 6. Update weights using Equation (33). |
| 7. Using new weights calculate and evaluate new error : |
| (i) if > then • Reset weights to previous values = , |
| • Increase learning rate by a factor : = , |
| • Return to step 4. |
| (ii) if ≤ then • Save new weights as current values = , |
| • Decrease learning rate by a factor : = , |
| • Return to step 3. |
| 8. Continue training until one of the following termination conditions is reached: |
| > or > or ≤ |
3.5. ANN Model Selection
4. Results and Discussion
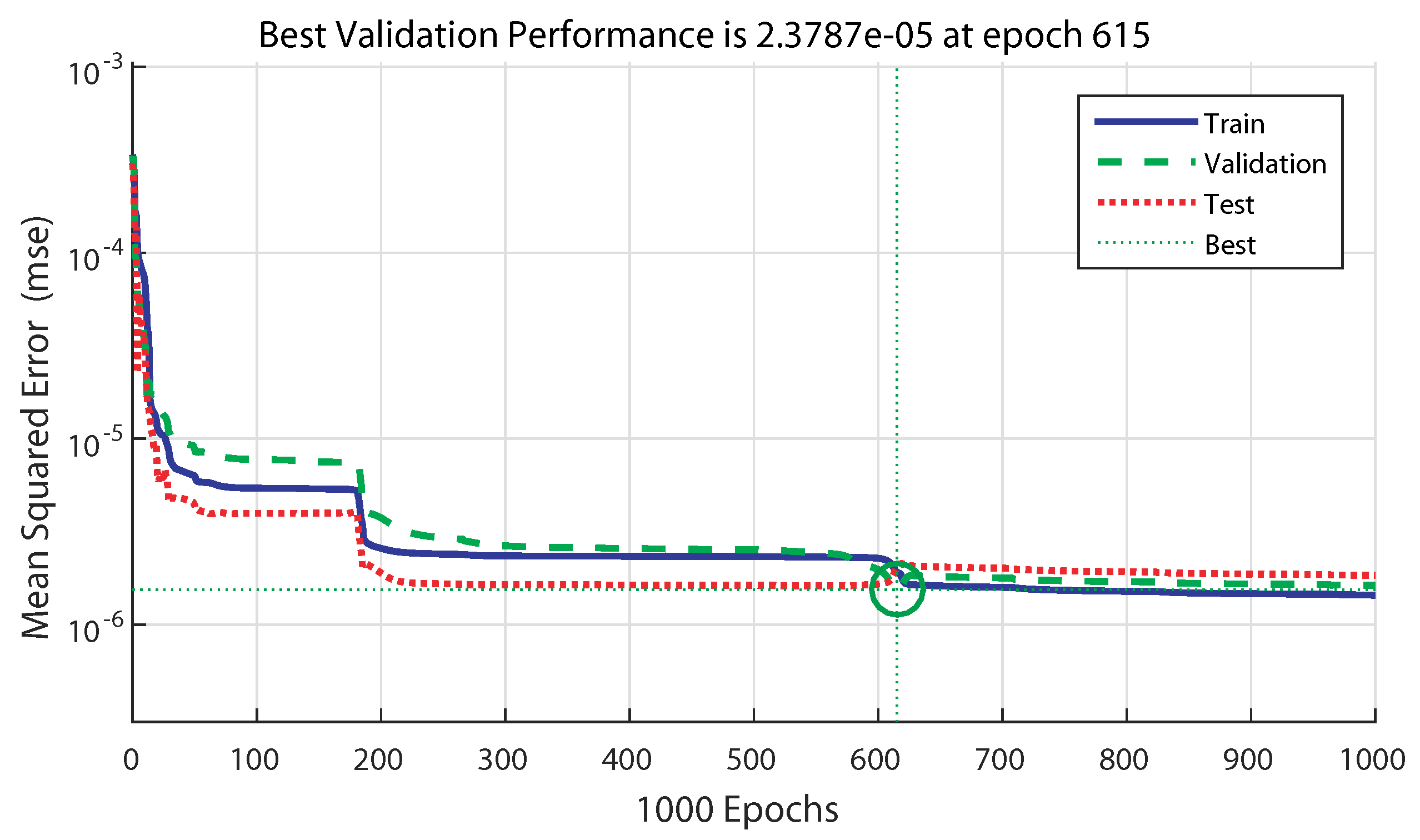
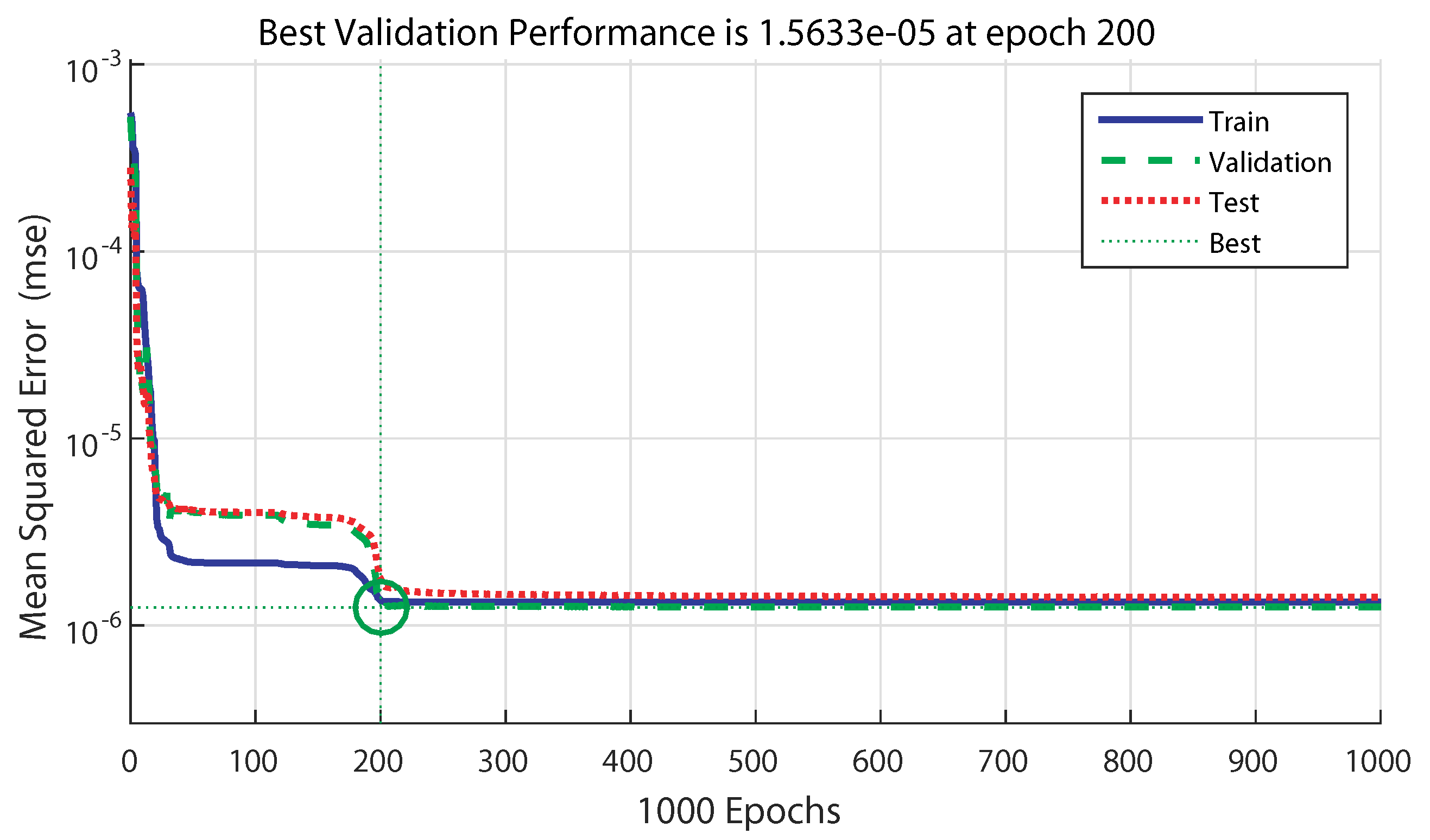
4.1. ANN Training Performance
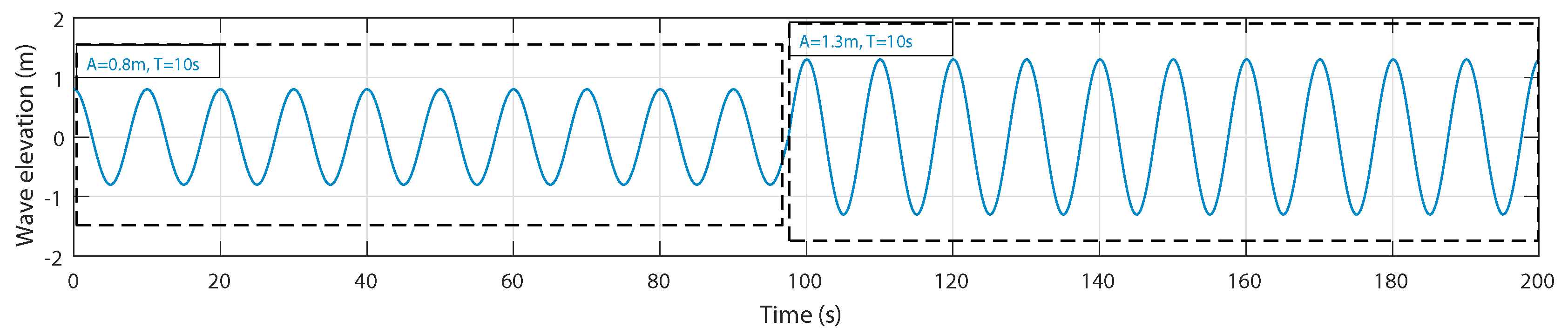
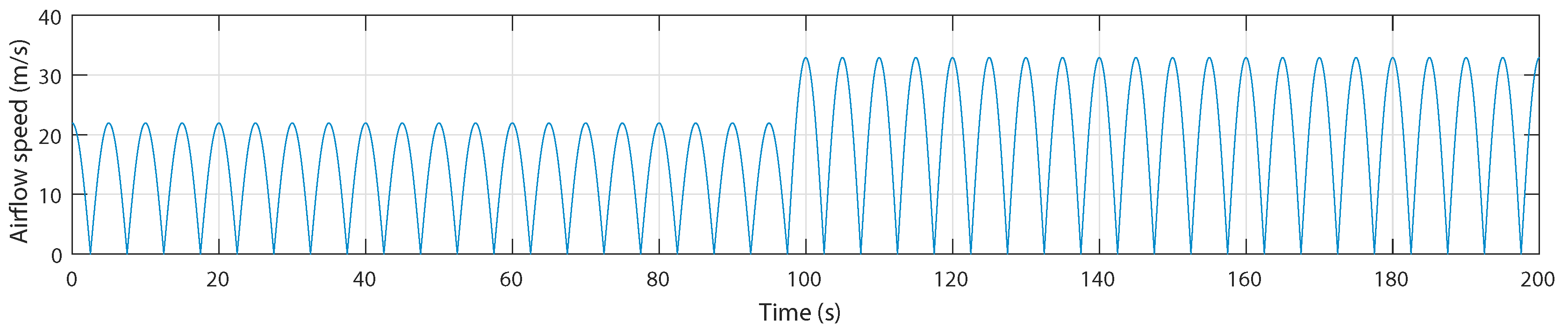
4.2. Control Assessment with Regular Waves
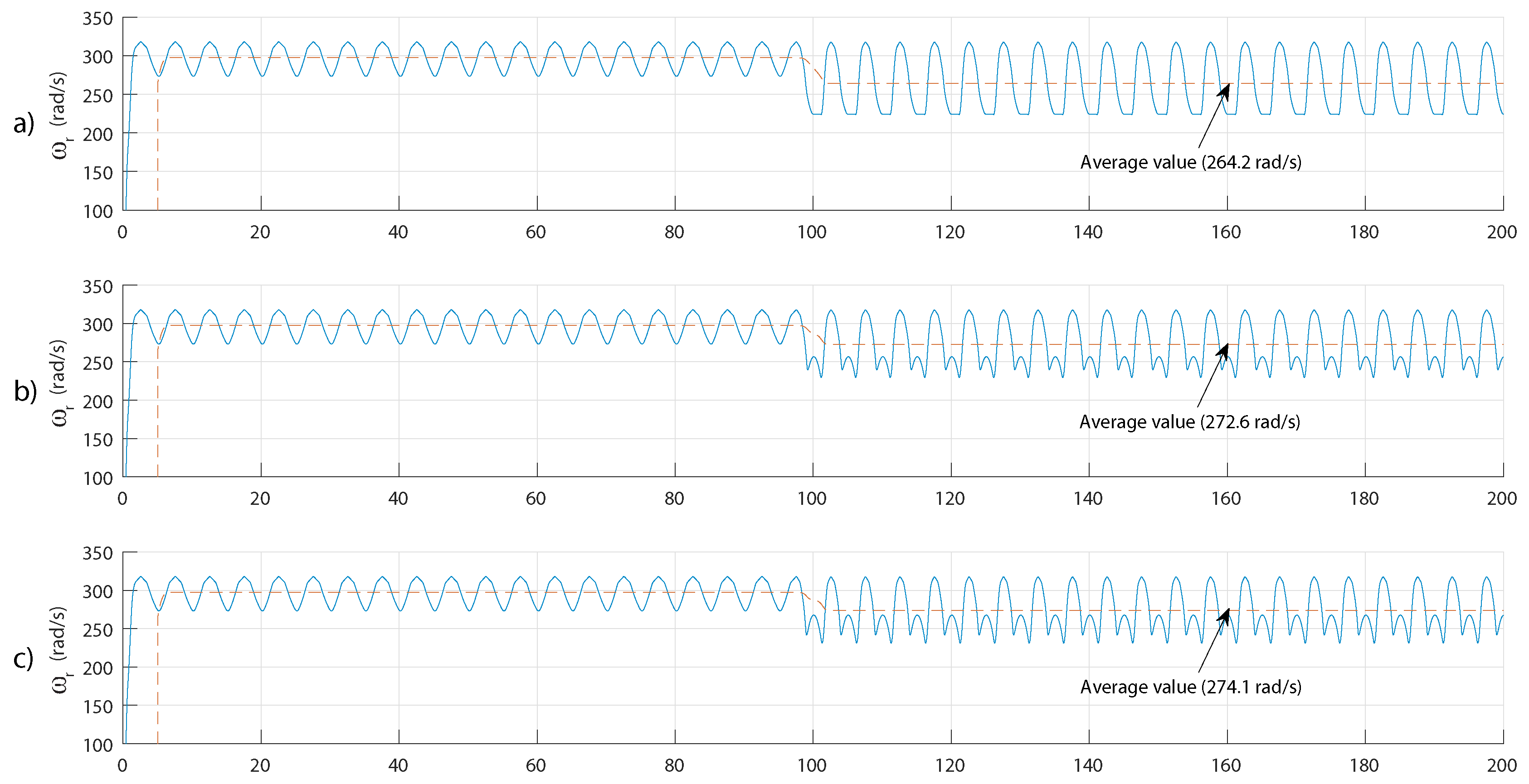
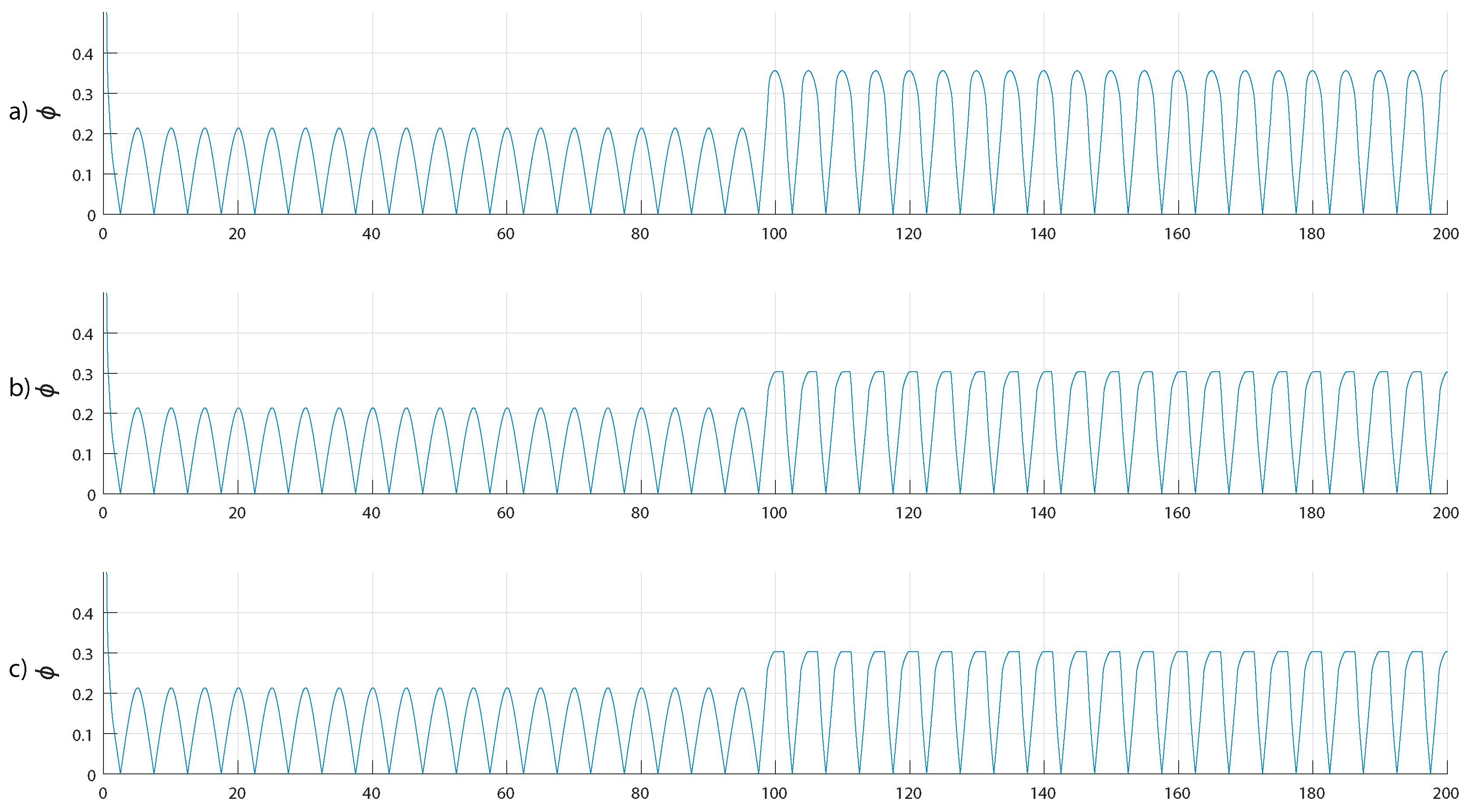
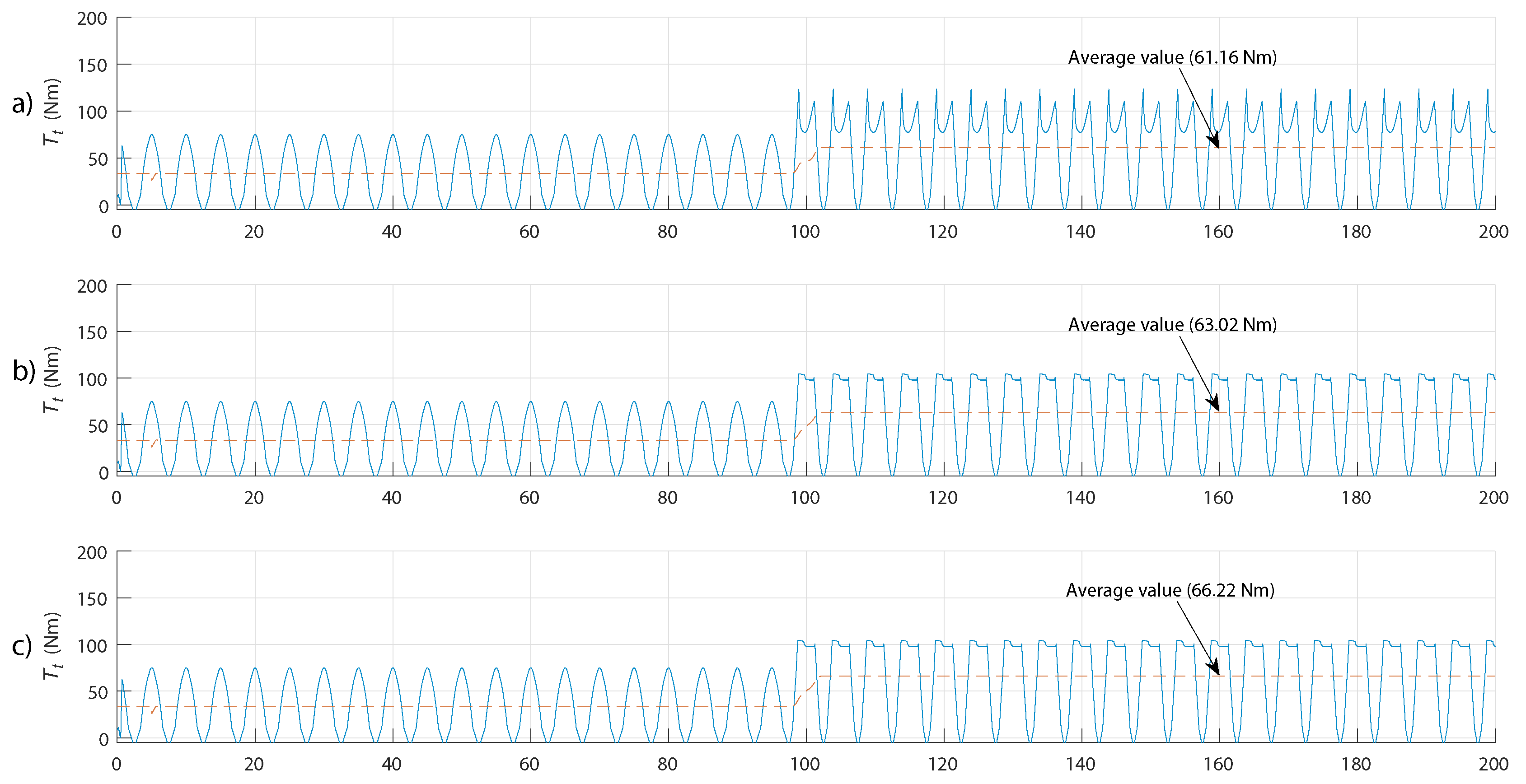
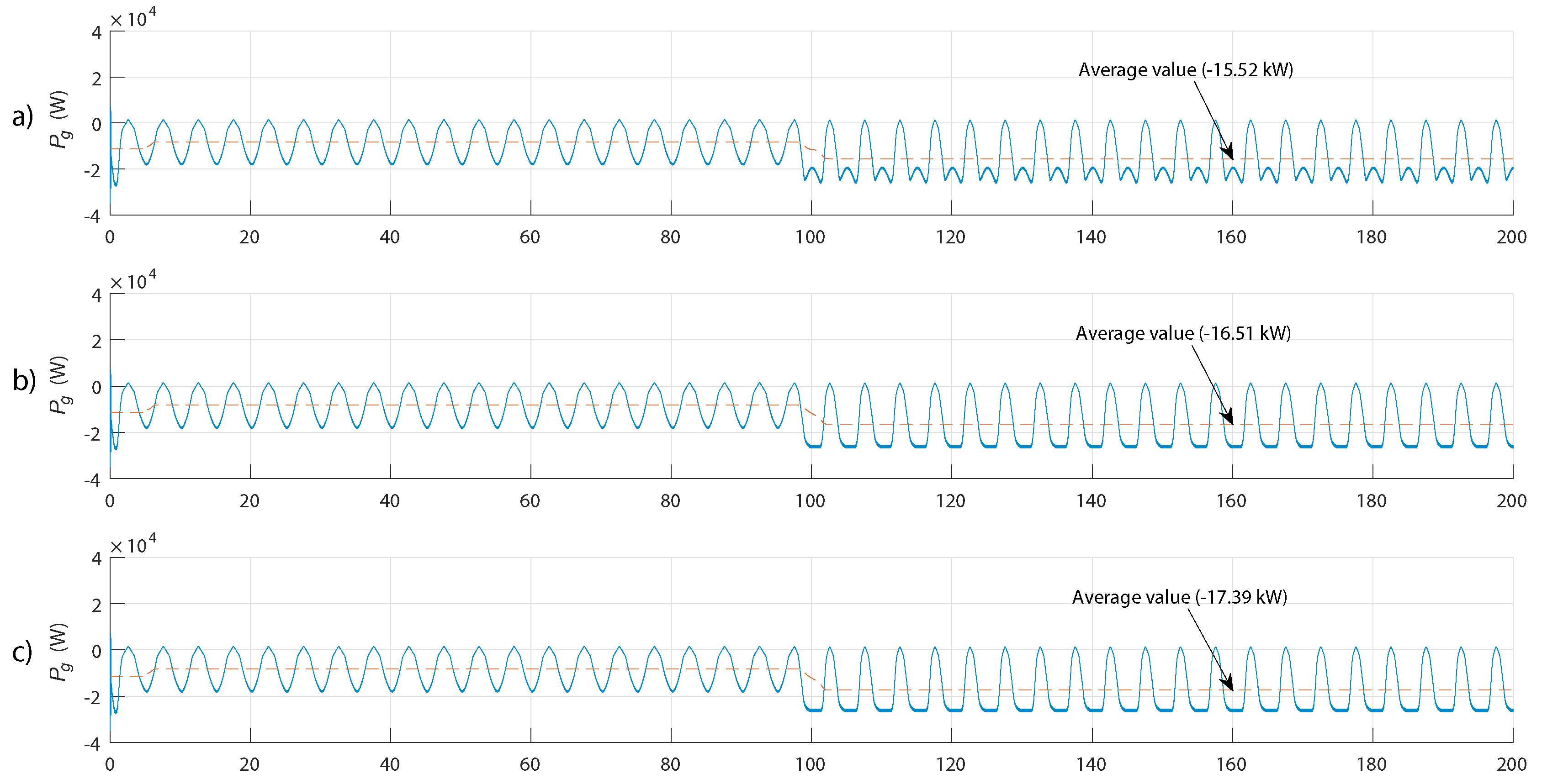
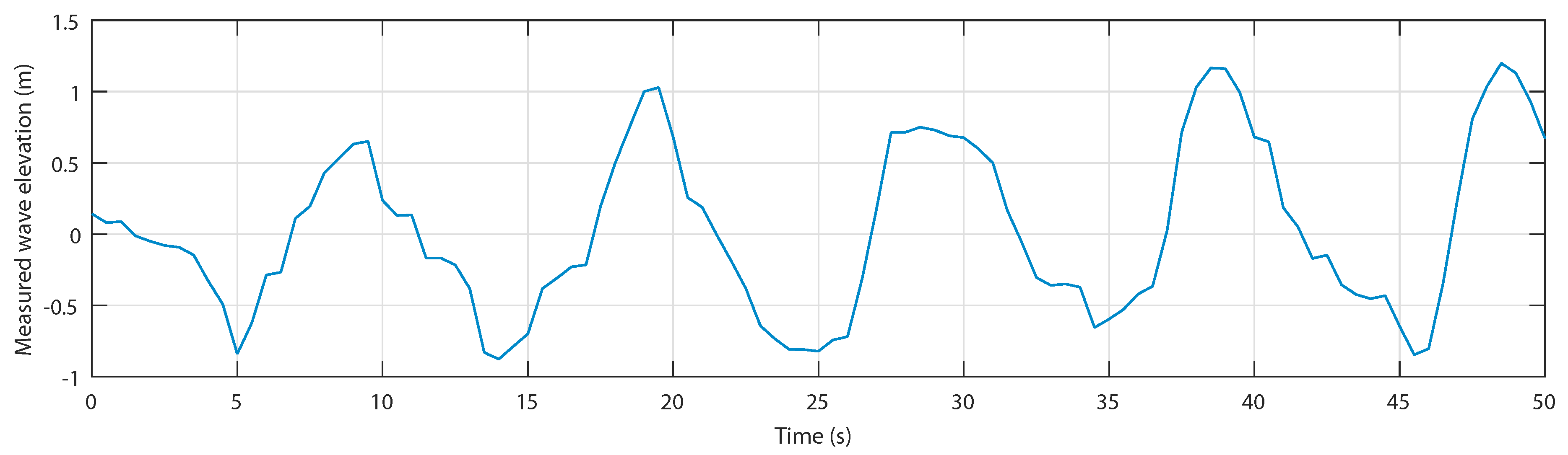
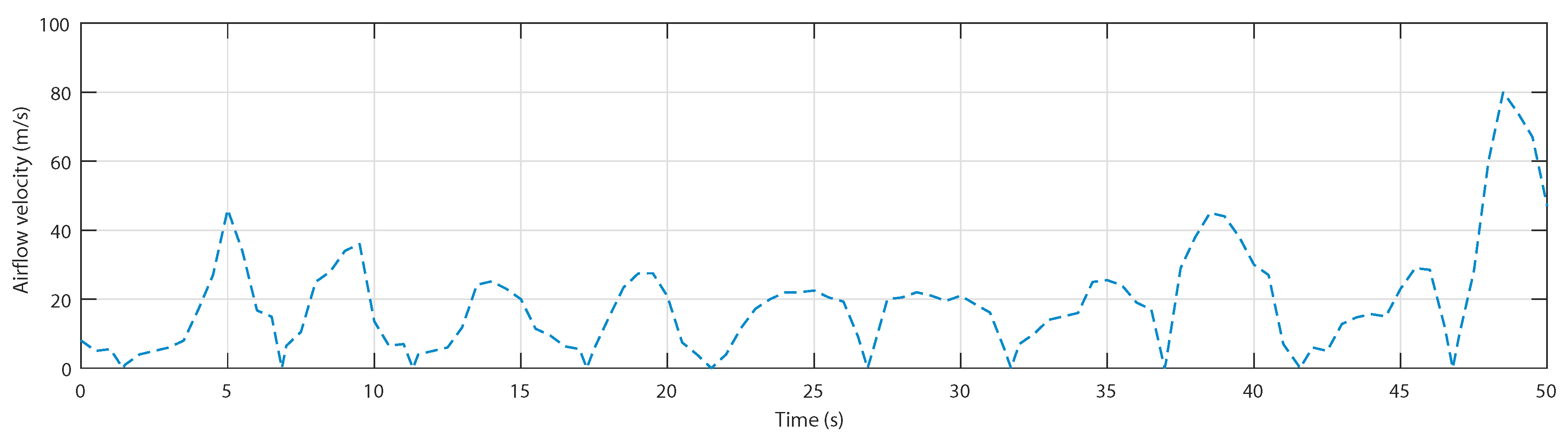
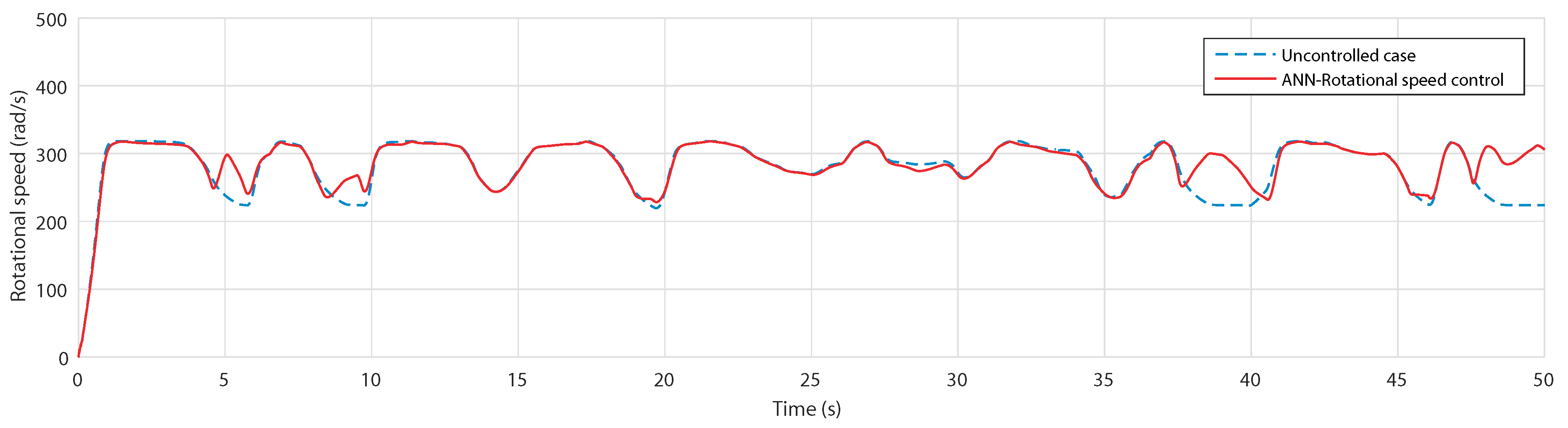
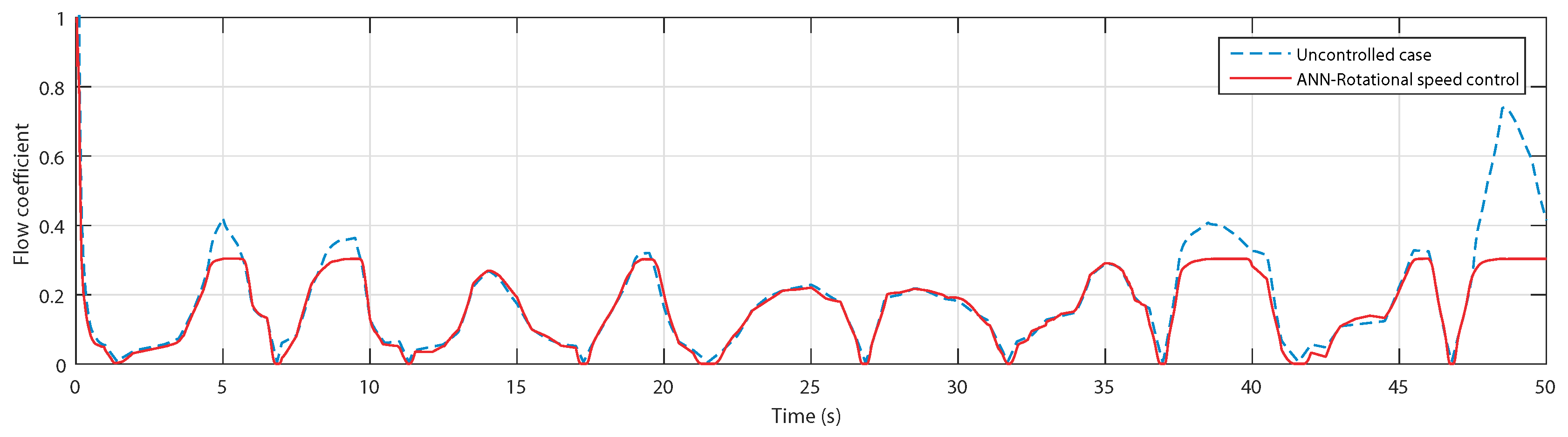
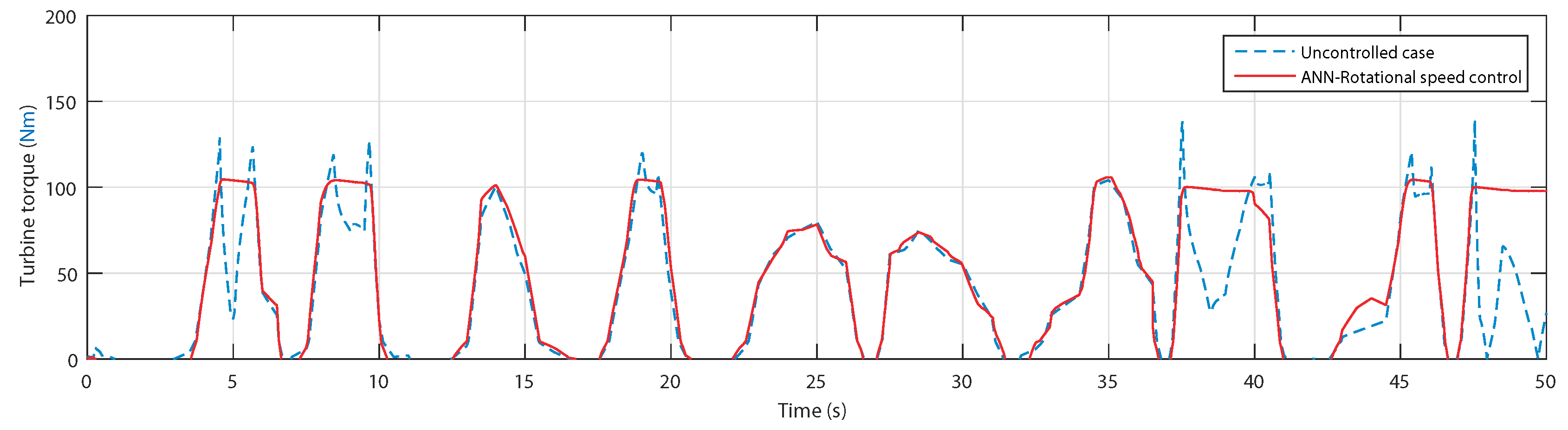
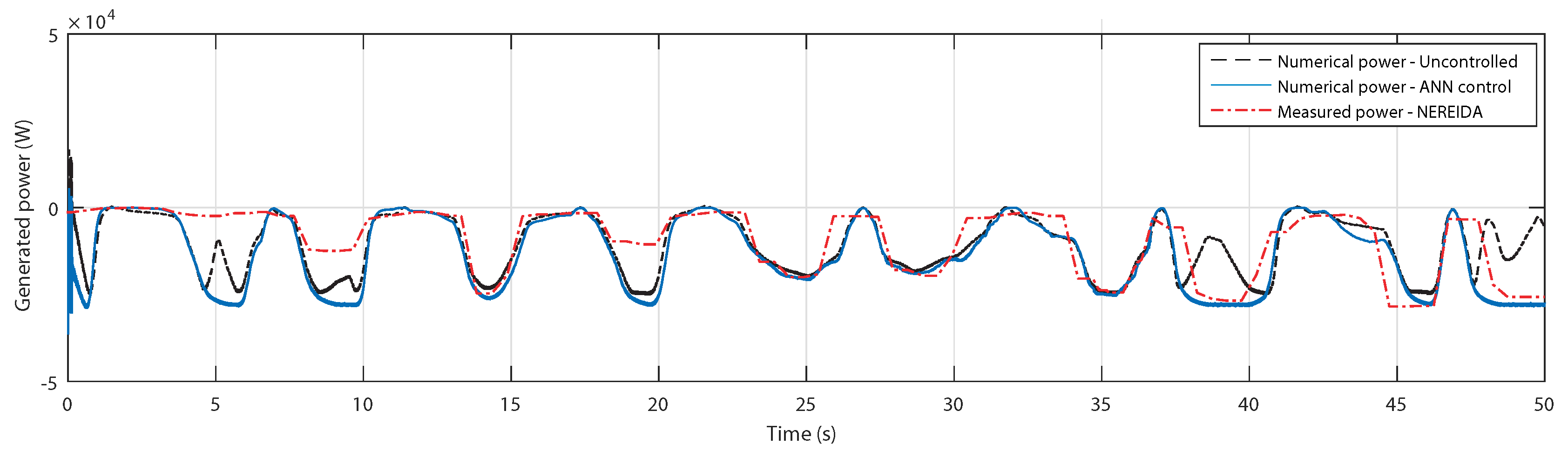
4.3. Control Assessment with Real Measured Wave Data
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ADCP | Acoustic Doppler Current Profiler |
| AWAC | Acoustic Wave and Current |
| ANN | Artificial Neural Network |
| BTB | Back-to-back converter |
| DC | Direct Current |
| DFIG | Doubly Fed Induction Generator |
| EVE | Ente Vasco de la Energia (Basque Energy Agency) |
| GHG | Greenhouse Gases |
| GSC | Grid-Side Converter |
| IPCC | Intergovernmental Panel on Climate Change |
| LMA | Levenberg–Marquardt Algorithm |
| MLP | Multi-Layer Perceptron |
| MPPT | Maximum Power Point Tracking |
| MSE | Mean Squared Error |
| OWC | Oscillating Water Column |
| PI | Proportion Integral |
| PLL | Phase Locked Loop |
| PWM | Pulse Width Modulation |
| RSC | Rotor-Side Converter |
| SWL | Still Water Level |
| WEC | Wave Energy Converter |
| Wavelength, amplitude and height (m) | |
| Sea depth and wave surface elevation (m) | |
| Wave period (s) and wave frequency (rad/s) | |
| g | Acceleration gravity () |
| Capture chamber pressure and Pressure drop () | |
| Capture chamber inner width and length (m) | |
| Capture chamber volume () and flow rate () | |
| Atmospheric density () and airflow speed () | |
| Blade chord length, blade span and turbine diameter (m) | |
| Blade number, pole number, wave number and turbine constant | |
| Electromagnetic and turbine torques () | |
| J | Turbo-generator inertia () |
| Torque, power and flow coefficients | |
| Stator and rotor resistances () | |
| Stator and rotor inductances (H) | |
| Stator and rotor currents (A) | |
| Stator and rotor flux () | |
| Stator and rotor rotational speed () | |
| Sum function, activation function, bias and output of the jth neuron | |
| output of ith neuron from previous layer and output of the jth neuron from current layer | |
| Weight of signal connecting ith neuron from previous layer to jth neuron of current layer |
References
- World Meteorogical Organization (WMO). WMO Climate Statement: Past 4 Years Warmest on Record; World Meteorogical Organization: Geneva, Switzerland, November 2018; Available online: https://public.wmo.int/en/media/press-release/wmo-climate-statement-past-4-years-warmest-record (accessed on 6 September 2020).
- IPCC. Special Report on Global Warming of 1.5 °C (SR15); IPCC: Geneva, Switzerland, October 2018; Available online: https://www.ipcc.ch/sr15/ (accessed on 6 September 2020).
- UNFCCC. What is the Kyoto Protocol; UNFCCC: Bonn, Germany, December 1997; Available online: https://unfccc.int/kyoto_protocol (accessed on 6 September 2020).
- European Commission. 2020 Climate & Energy Package; European Commission: Brussels, Belgium, March 2007; Available online: https://ec.europa.eu/clima/policies/strategies/2020_en#tab-0-0 (accessed on 6 September 2020).
- IRENA. Global Energy Transformation: A Roadmap to 2050, 2019th ed.; International Renewable Energy Agency: Abu Dhabi, UAE, 2019. [Google Scholar]
- UNFCCC. Adoption of the Paris Agreement FCCC/CP/2015/L. 9/Rev. 1. 1. United Nations Framework Convention on Climate Change; UNFCCC: Paris, France, December 2015; Available online: https://unfccc.int/resource/docs/2015/cop21/eng/l09r01.pdf (accessed on 6 September 2020).
- Ocean Energy Forum. Ocean Energy Strategic Roadmap 2016, Building Ocean Energy for Europe; Ocean Energy Forum: Brussels, Belgium, November 2016; Available online: https://webgate.ec.europa.eu/maritimeforum/sites/maritimeforum/files/OceanEnergyForum_Roadmap_Online_Version_08Nov2016.pdf (accessed on 6 September 2020).
- Rusu, L.; Onea, F. Assessment of the performances of various wave energy converters along the European continental coasts. Energy 2015, 82, 889–904. [Google Scholar] [CrossRef]
- Stratigaki, V. WECANet: The First Open Pan-European Network for Marine Renewable Energy with a Focus on Wave Energy-COST Action CA17105. Water 2019, 11, 1249. [Google Scholar] [CrossRef] [Green Version]
- Raghunathan, S. Performance of the Wells self-rectifying turbine. Aeronaut. J. 1985, 89, 369–379. [Google Scholar]
- Raghunathan, S. The wells air turbine for wave energy conversion. Prog. Aerosp. Sci. 1995, 31, 335–386. [Google Scholar] [CrossRef]
- Torresi, M.; Camporeale, S.M.; Pascazio, G. Detailed CFD analysis of the steady flow in a Wells turbine under incipient and deep stall conditions. J. Fluids Eng. 2009, 131, 0711031–07110317. [Google Scholar] [CrossRef]
- Torresi, M.; Stefanizzi, M.; Fornarelli, F.; Gurnari, L.; Filianoti, P.G.F.; Camporeale, S.M. Performance characterization of a wells turbine under unsteady flow conditions. AIP Conf. Proc. 2019, 2191, 020149. [Google Scholar]
- Cambuli, F.; Ghisu, T.; Virdis, I.; Puddu, P. Dynamic interaction between OWC system and Wells turbine: A comparison between CFD and lumped parameter model approaches. Ocean. Eng. 2019, 191, 106459. [Google Scholar] [CrossRef]
- Hashem, I.; Hameed, H.A.; Mohamed, M.H. An axial turbine in an innovative oscillating water column (OWC) device for sea-wave energy conversion. Ocean. Eng. 2018, 164, 536–562. [Google Scholar] [CrossRef]
- Barambones, O.; Cortajarena, J.A.; de Durana, J.M.G.; Alkorta, P. A real time sliding mode control for a wave energy converter based on a wells turbine. Ocean. Eng. 2018, 163, 275–287. [Google Scholar] [CrossRef]
- Sobey, R.; Goodwin, P.; Thieke, R.; Westberg, R.J., Jr. Application of Stokes, Cnoidal, and Fourier wave theories. J. Waterw. Port Coastal Ocean. Eng. 1987, 113, 565–587. [Google Scholar] [CrossRef]
- Le Roux, J.P. An extension of the Airy theory for linear waves into shallow water. Coast. Eng. 2008, 55, 295–301. [Google Scholar] [CrossRef]
- Garrido, A.J.; Otaola, E.; Garrido, I.; Lekube, J.; Maseda, F.J.; Liria, P.; Mader, J. Mathematical Modeling of Oscillating Water Columns Wave-Structure Interaction in Ocean Energy Plants. Math. Probl. Eng. 2015, 2015, 1–11. [Google Scholar] [CrossRef] [Green Version]
- M’zoughi, F.; Garrido, I.; Garrido, A.J.; De La Sen, M. Self-Adaptive Global-Best Harmony Search Algorithm-Based Airflow Control of a Wells-Turbine-Based Oscillating-Water Column. Appl. Sci. 2020, 10, 4628. [Google Scholar] [CrossRef]
- M’zoughi, F.; Bouallègue, S.; Garrido, A.J.; Garrido, I.; Ayadi, M. Fuzzy gain scheduled PI-based airflow control of an oscillating water column in wave power generation plants. IEEE J. Ocean. Eng. 2019, 44, 1058–1076. [Google Scholar] [CrossRef]
- M’zoughi, F.; Garrido, I.; Garrido, A.J.; De La Sen, M. Fuzzy Gain Scheduled-Sliding Mode Rotational Speed Control of an Oscillating Water Column. IEEE Access 2020, 8, 45853–45873. [Google Scholar] [CrossRef]
- Falcão, A.F.O.; Gato, L.M.C. Air Turbines. In Comprehensive Renewable Energy; Sayigh, A., Ed.; Elsevier: Oxford, UK, 2012; Volume 8, pp. 111–149. [Google Scholar] [CrossRef]
- López, I.; Andreu, J.; Ceballos, S.; De Alegría, I.M.; Kortabarria, I. Review of wave energy technologies and the necessary power-equipment. Renew. Sustain. Energy Rev. 2013, 27, 413–434. [Google Scholar] [CrossRef]
- Setoguchi, T.; Takao, M. Current status of self rectifying air turbines for wave energy conversion. Energy Convers. Manag. 2006, 47, 2382–2396. [Google Scholar] [CrossRef]
- Muller, S.; Diecke, M.; De Donker, R.W. Doubly fed induction generator systems for wind turbines. IEEE Ind. Appl. Mag. 2002, 8, 26–33. [Google Scholar] [CrossRef]
- Ledesma, P.; Usaola, J. Doubly fed induction generator model for transient stability analysis. IEEE Trans. Energy Convers. 2005, 20, 388–397. [Google Scholar] [CrossRef]
- Chen, Z.; Guerrero, J.M.; Blaabjerg, F. A review of the state of the art of power electronics for wind turbines. IEEE Trans. Power Electron. 2009, 24, 1859–1875. [Google Scholar] [CrossRef]
- Fletcher, J.; Yang, J. Introduction to the Doubly-Fed Induction Generator for Wind Power Applications. In Paths to Sustainable Energy; INTECH Open Access Publisher: London, UK, 2010. [Google Scholar]
- Alhato, M.M.; Bouallègue, S. Direct Power Control Optimization for Doubly Fed Induction Generator Based Wind Turbine Systems. Math. Comput. Appl. 2019, 24, 77. [Google Scholar] [CrossRef] [Green Version]
- Alhato, M.M.; Bouallègue, S. Thermal exchange optimization based control of a doubly fed induction generator in wind energy conversion systems. Indones. J. Electr. Eng. Comput. Sci. 2020, 20, 1252–1260. [Google Scholar] [CrossRef]
- Lei, Y.; Mullane, A.; Lightbody, G.; Yacamini, R. Modeling of the wind turbine with a doubly fed induction generator for grid integration studies. IEEE Trans. Energy Convers. 2006, 21, 257–264. [Google Scholar] [CrossRef]
- Omidvar, O.; Elliott, D.L. Neural Systems for Control; Academic Press: Cambridge, MA, USA, 1997; ISBN 9780080537399. [Google Scholar]
- Yilmaz, A.S.; Ozer, Z. Pitch angle control in wind turbines above the rated wind speed by multi-layer perceptron and radial basis function neural networks. Expert Syst. Appl. 2009, 36, 9767–9775. [Google Scholar] [CrossRef]
- Alberdi, M.; Amundarain, M.; Garrido, A.; Garrido, I. Neural control for voltage dips ride-through of oscillating water column-based wave energy converter equipped with doubly-fed induction generator. Renew. Energy 2012, 48, 16–26. [Google Scholar] [CrossRef]
- Simpson, M.R. Discharge Measurements Using a Broad-Band Acoustic Doppler Current Profiler; US Department of the Interior, US Geological Survey: Reston, CA, USA, 2001.
- Brumley, B.H.; Cabrera, R.G.; Deines, K.L.; Terray, E.A. Performance of a broad-band acoustic Doppler current profiler. IEEE J. Ocean. Eng. 1991, 16, 402–407. [Google Scholar] [CrossRef]
- Pedersen, T.; Nylund, S.; Dolle, A. Wave height measurements using acoustic surface tracking. In Proceedings of the OCEANS’02 MTS/IEEE, Biloxi, MI, USA, 29–31 October 2002; Volume 3, pp. 1747–1754. [Google Scholar]
- Pedersen, T.; Siegel, E.; Wood, J. Directional wave measurements from a subsurface buoy with an acoustic wave and current profiler (AWAC). In Proceedings of the OCEANS 2007, Vancouver, BC, Canada, 29 September–4 October 2007; pp. 1–10. [Google Scholar]
- Lohrmann, A.; Pedersen, T.K.; Nortek, A.S. System and Method for Determining Directional and Non-Directional Fluid Wave and Current Measurements. U.S. Patent 7,352,651, 1 April 2008. [Google Scholar]
- Work, P.A. Nearshore directional wave measurements by surface-following buoy and acoustic Doppler current profiler. Ocean. Eng. 2008, 35, 727–737. [Google Scholar] [CrossRef]
- Hagan, M.T.; Menhaj, M.B. Training feedforward networks with the Marquardt algorithm. IEEE Trans. Neural Netw. 1994, 5, 989–993. [Google Scholar] [CrossRef] [PubMed]
- Sheela, K.G.; Deepa, S.N. Review on methods to fix number of hidden neurons in neural networks. Math. Probl. Eng. 2013. [Google Scholar] [CrossRef] [Green Version]
- Wilamowski, B.M.; Yu, H. Improved computation for Levenberg–Marquardt training. IEEE Trans. Neural Netw. 2010, 21, 930–937. [Google Scholar] [CrossRef]
- Suratgar, A.A.; Tavakoli, M.B.; Hoseinabadi, A. Modified Levenberg–Marquardt method for neural networks training. Int. J. Comput. Inf. Eng. 2010, 6, 46–48. [Google Scholar]
- Ampazis, N.; Perantonis, S.J. Levenberg–Marquardt algorithm with adaptive momentum for the efficient training of feedforward networks. In Proceedings of the IEEE-INNS-ENNS International Joint Conference on Neural Networks, Como, Italy, 27 July 2000; pp. 126–131. [Google Scholar]
- Ghefiri, K.; Bouallègue, S.; Garrido, I.; Garrido, A.J.; Haggège, J. Multi-Layer Artificial Neural Networks Based MPPT-Pitch Angle Control of a Tidal Stream Generator. Sensors 2018, 18, 1317. [Google Scholar] [CrossRef] [PubMed] [Green Version]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Capture Chamber | Wells Turbine | DFIG Generator | |
|---|---|---|---|
| = 4.5 m | n = 5 | = 0.5968 | = 18.45 kW |
| = 4.3 m | b = 0.21 m | = 0.6258 | = 400 V |
| = 1.19 kg/m3 | l = 0.165 m | = 0.0003495 H | = 50 Hz |
| = 1029 kg/m3 | r = 0.375 m | = 0.324 H | p = 2 |
| a = 0.4417 m2 | = 0.324 H | ||
| MLP | Learning | Testing | Validation | MLP | Learning | Testing | Validation |
|---|---|---|---|---|---|---|---|
| Structure | Quality | Quality | Quality | Structure | Quality | Quality | Quality |
| 2 × 2 × 1 | 86.04% | 86.34% | 84.89% | 2 × 2 × 4 × 1 | 95.08% | 95.36% | 94.58% |
| 2 × 4 × 1 | 88.32% | 87.01% | 86.48% | 2 × 4 × 2 × 1 | 96.49% | 96.44% | 96.44% |
| 2 × 8 × 1 | 90.22% | 90.22% | 89.76% | 2 × 4 × 4 × 1 | 97.41% | 97.41% | 97.41% |
| 2 × 16 × 1 | 91.42% | 91.63% | 91.61% | 2 × 4 × 8 × 1 | 98.24% | 98.32% | 98.32% |
| 2 × 2 × 2 × 1 | 93.60% | 92.82% | 92.74% | 2 × 8 × 8 × 1 | 96.05% | 96.05% | 95.56% |
| 2 × 2 × 4 × 1 | 94.43% | 94.02% | 94.11% | 2 × 16 × 16 × 1 | 94.38% | 93.17% | 92.89% |
| Structure | Epochs | MSE | Structure | Epochs | MSE | Structure | Epochs | MSE |
|---|---|---|---|---|---|---|---|---|
| 35 | 9.786 × 10 | 243 | 7.612 × 10 | 172 | 3.347 × 10 | |||
| 2 × 2 × 1 | 254 | 6.554 × 10 | 2 × 2 × 2 × 1 | 457 | 6.484 × 10 | 2 × 4 × 8 × 1 | 344 | 1.014 × 10 |
| 681 | 5.724 × 10 | 682 | 5.876 × 10 | (ANN1) | 615 | 2.378 × 10 | ||
| 533 | 3.866 × 10 | 607 | 4.466 × 10 | 200 | 1.563 × 10 | |||
| 2 × 4 × 1 | 786 | 2.018 × 10 | 2 × 2 × 4 × 1 | 773 | 3.778 × 10 | 2 × 8 × 4 × 1 | 366 | 2.872 × 10 |
| 834 | 9.022 × 10 | 879 | 3.101 × 10 | (ANN2) | 641 | 5.423 × 10 | ||
| 645 | 7.624 × 10 | 712 | 2.525 × 10 | 478 | 3.664 × 10 | |||
| 2 × 8 × 1 | 792 | 5.236 × 10 | 2 × 4 × 2 × 1 | 914 | 2.011 × 10 | 2 × 8 × 8 × 1 | 726 | 4.073 × 10 |
| 889 | 3.447 × 10 | 726 | 1.806 × 10 | 1000 | 5.748 × 10 | |||
| 726 | 2.168 × 10 | 605 | 8.122 × 10 | 684 | 5.420 × 10 | |||
| 2 × 16 × 1 | 904 | 1.678 × 10 | 2 × 4 × 4 × 1 | 832 | 6.886 × 10 | 2 × 16 × 16 × 1 | 892 | 6.011 × 10 |
| 1000 | 8.761 × 10 | 1000 | 5.241 × 10 | 1000 | 6.845 × 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
M’zoughi, F.; Garrido, I.; Garrido, A.J.; De La Sen, M. Rotational Speed Control Using ANN-Based MPPT for OWC Based on Surface Elevation Measurements. Appl. Sci. 2020, 10, 8975. https://doi.org/10.3390/app10248975
M’zoughi F, Garrido I, Garrido AJ, De La Sen M. Rotational Speed Control Using ANN-Based MPPT for OWC Based on Surface Elevation Measurements. Applied Sciences. 2020; 10(24):8975. https://doi.org/10.3390/app10248975
Chicago/Turabian StyleM’zoughi, Fares, Izaskun Garrido, Aitor J. Garrido, and Manuel De La Sen. 2020. "Rotational Speed Control Using ANN-Based MPPT for OWC Based on Surface Elevation Measurements" Applied Sciences 10, no. 24: 8975. https://doi.org/10.3390/app10248975
APA StyleM’zoughi, F., Garrido, I., Garrido, A. J., & De La Sen, M. (2020). Rotational Speed Control Using ANN-Based MPPT for OWC Based on Surface Elevation Measurements. Applied Sciences, 10(24), 8975. https://doi.org/10.3390/app10248975