TLS for Dynamic Measurement of the Elastic Line of Bridges



Abstract
:1. Introduction
2. Materials and Methods
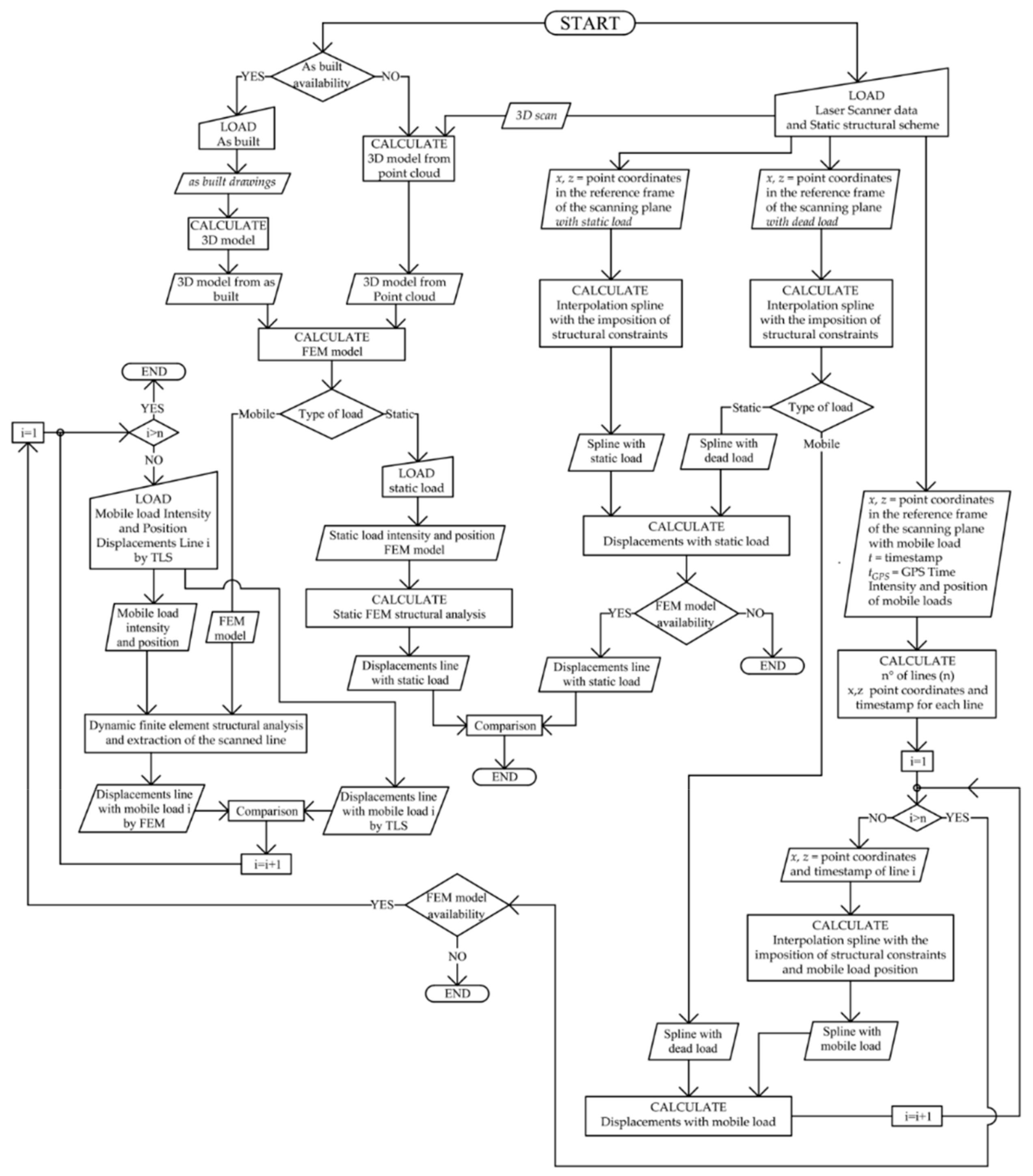
2.1. The Methodology
2.1.1. Time Synchronization
2.1.2. Use of Theoretical Models to Extract the Elastic Curves
- z = deflection
- x = abscissa (along the longitudinal axis)
- M = bending moment;
- E = Modulus of Elasticity;
- I = Area moment of Inertia cross-section.
- F = Force acting on the beam;
- δx = displacement at a distance x from the support 1;
- a = distance from the load to the support 2;
- b = distance from the load to the support 1;
- l = distance between supports.
2.1.3. Structures with Complex Shape
2.1.4. Elastic Curves
2.2. The Hardware Components
2.2.1. The Terrestrial Laser Scanner
2.2.2. The Total Station
2.2.3. The Digital Camera
2.2.4. The GNSS Receiver
2.3. The Software Implemented
3. Results
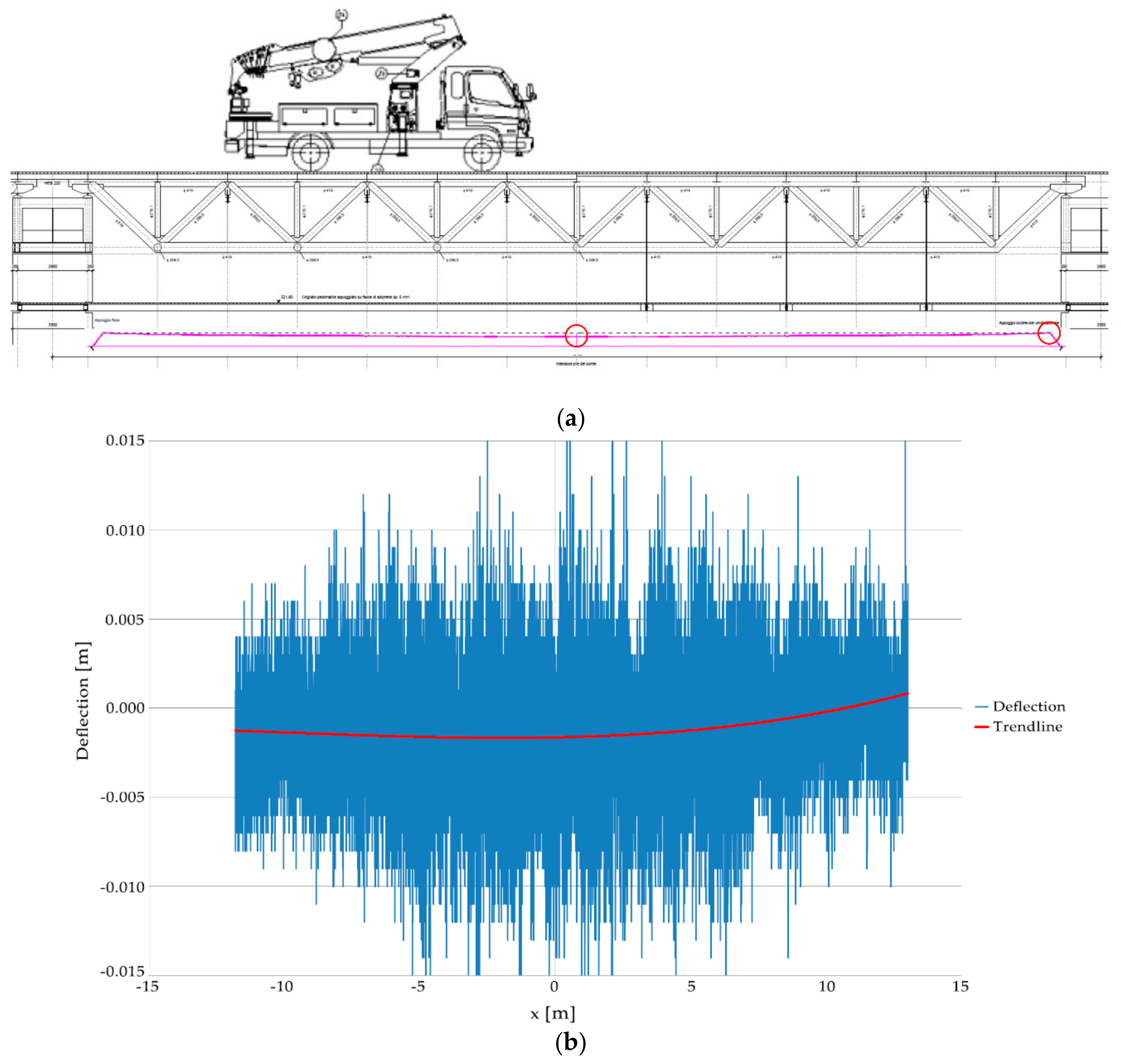
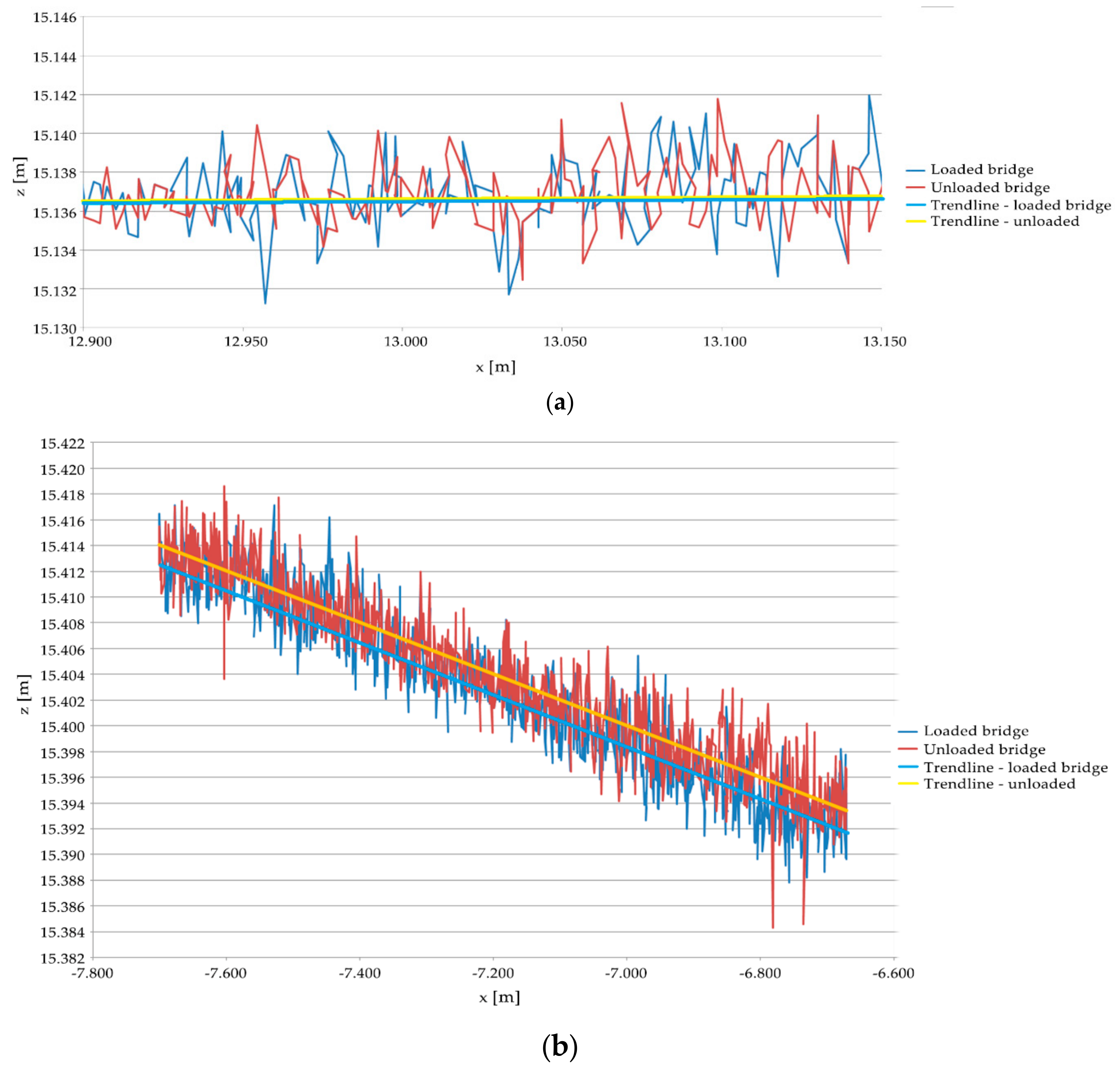
3.1. The First Test: The Bridge at University of Calabria
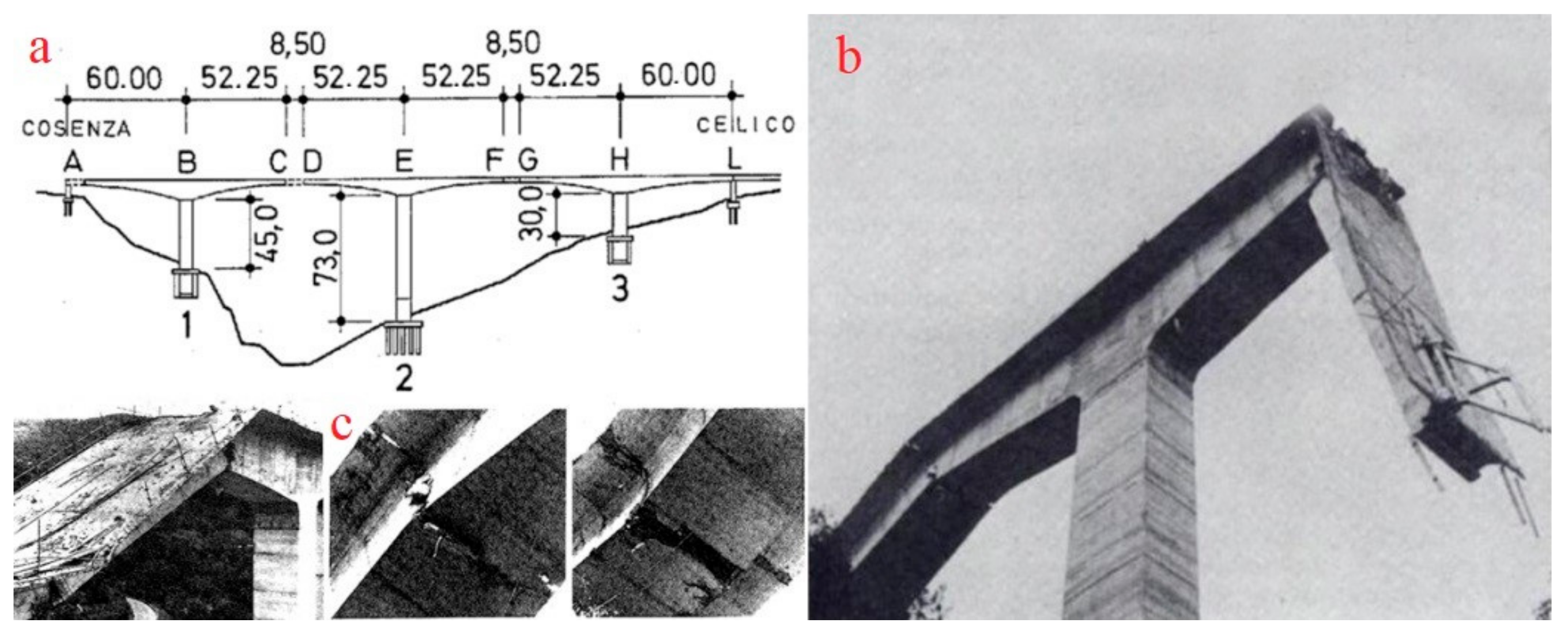
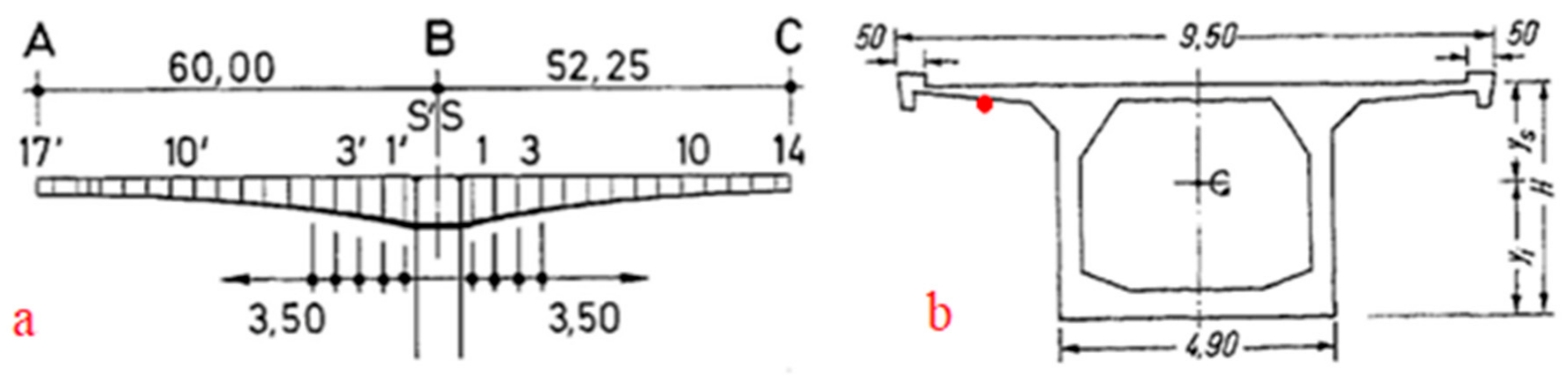
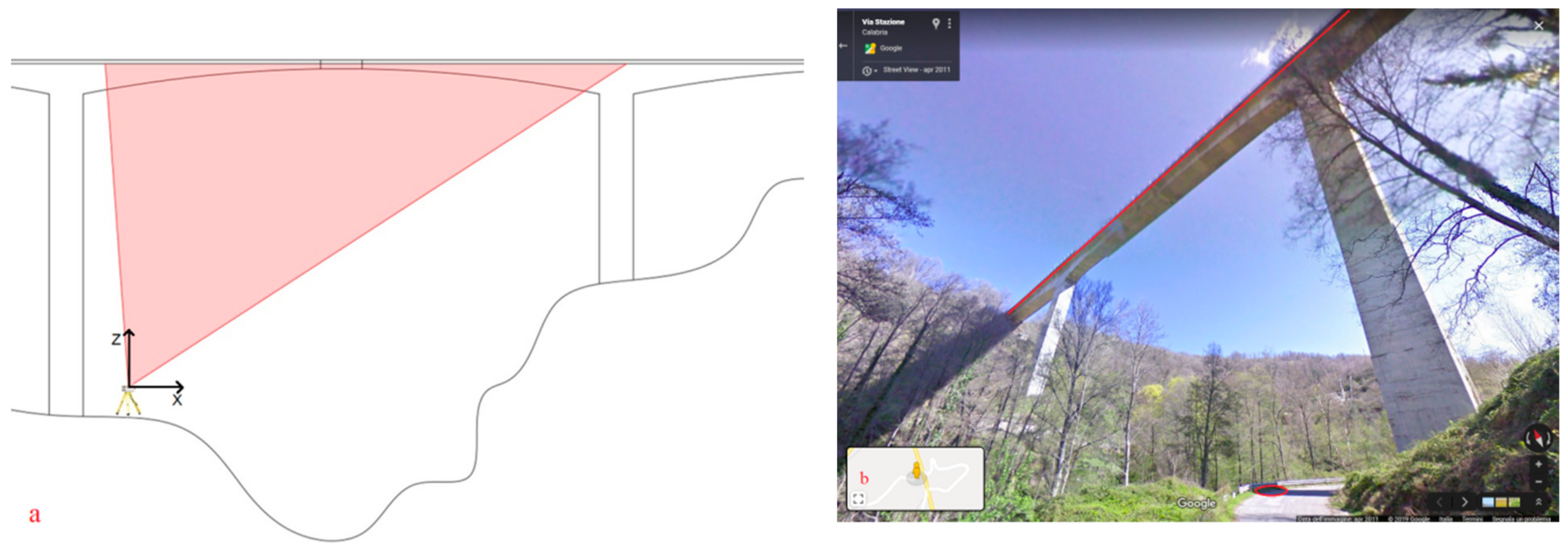
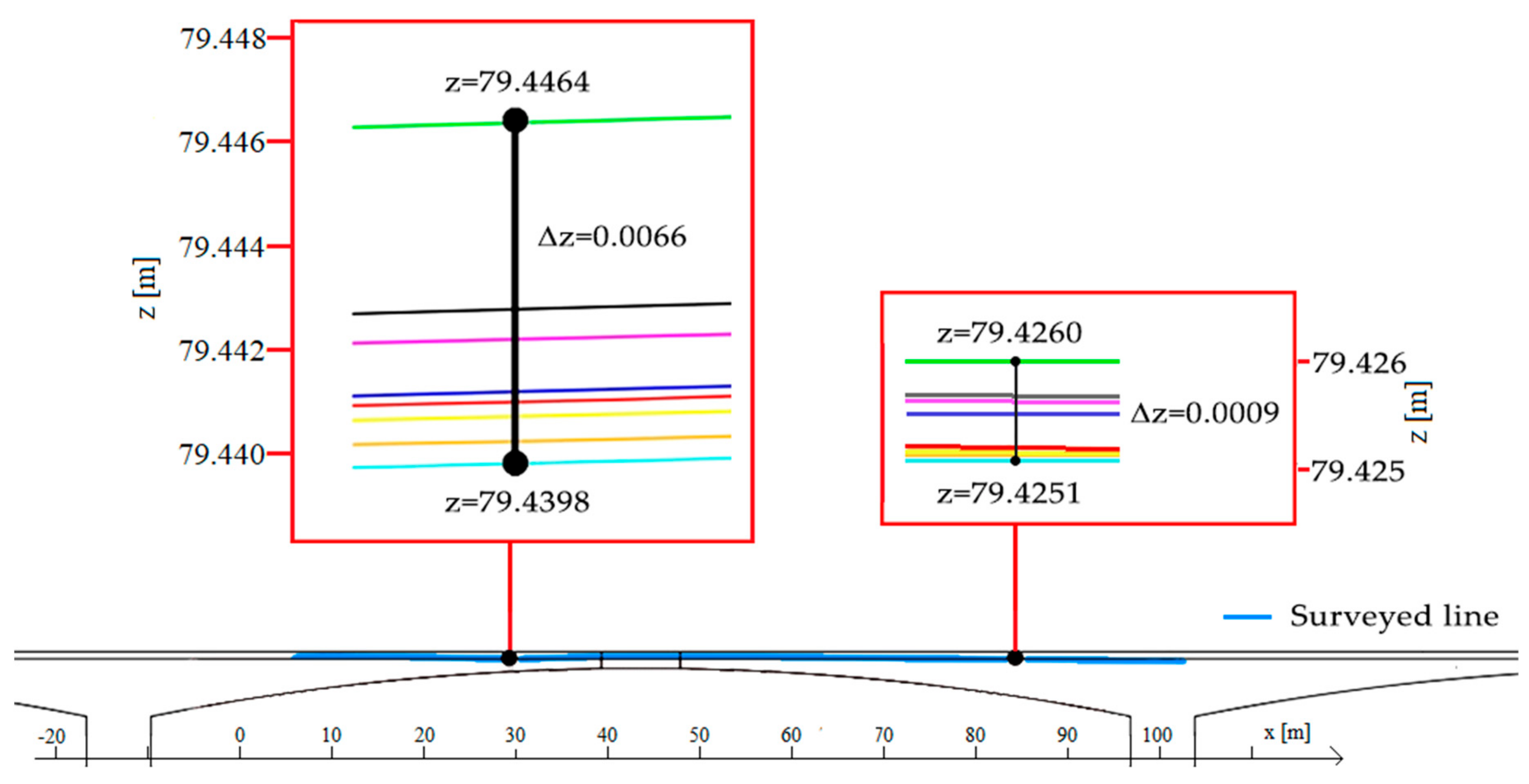
3.2. The Second Test: The Cannavino Bridge at Celico
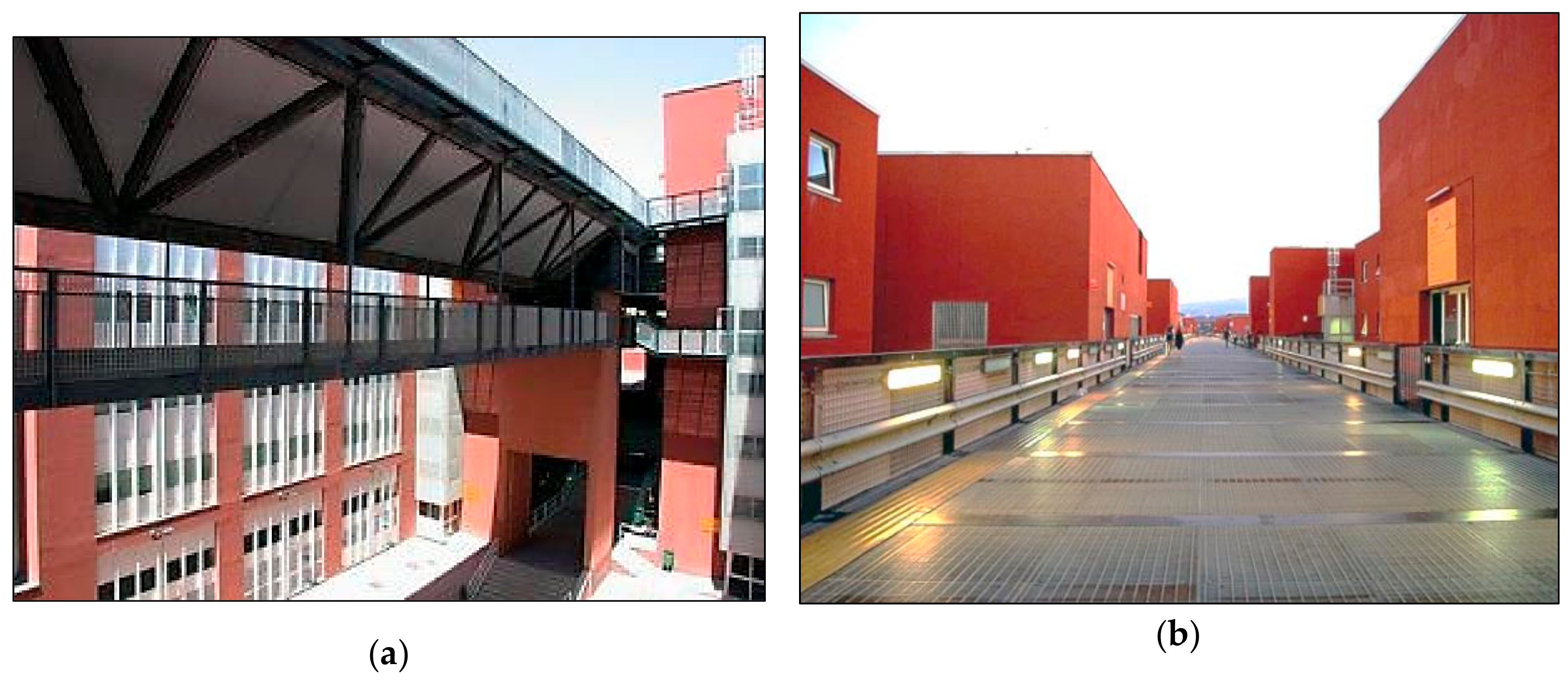
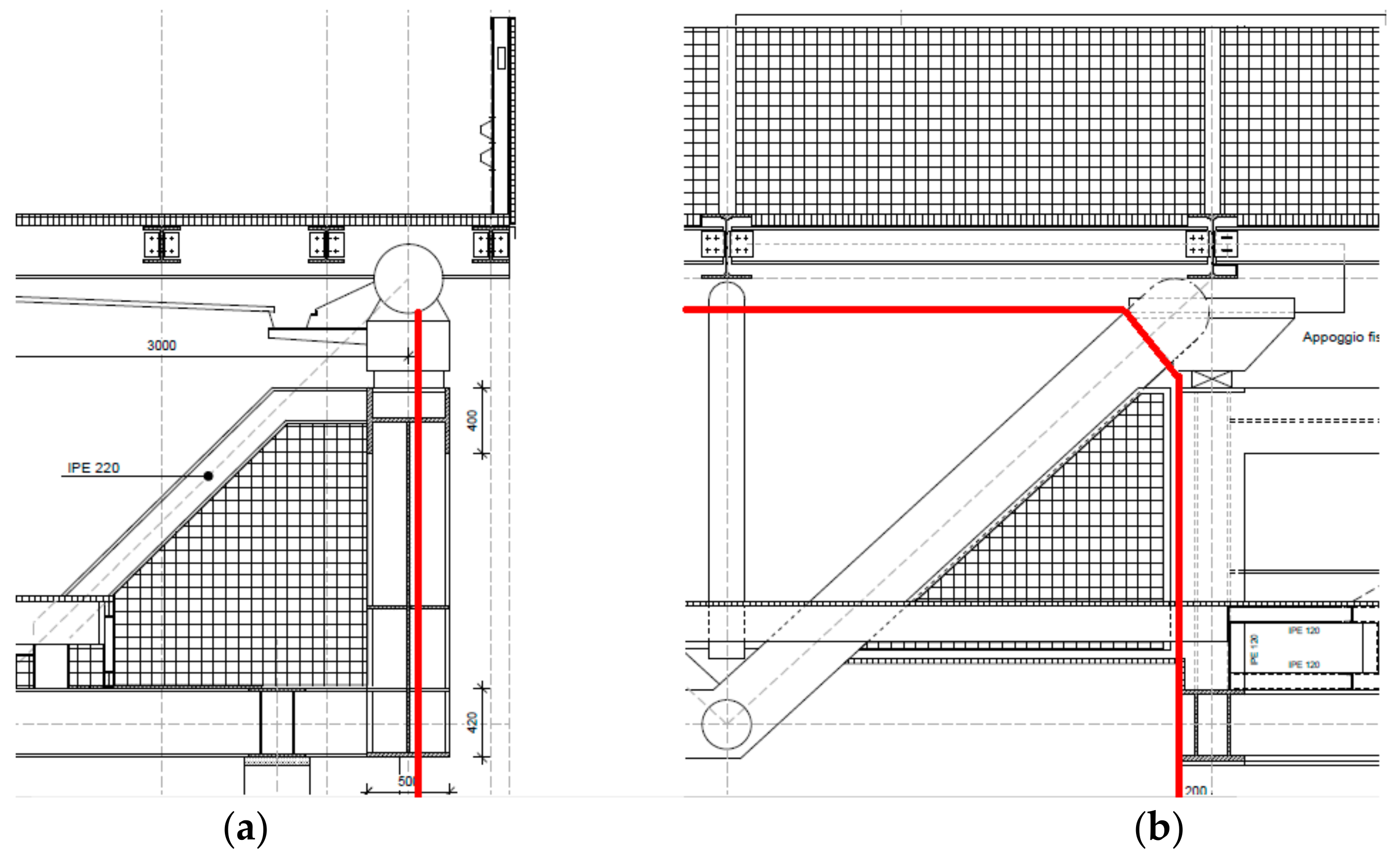
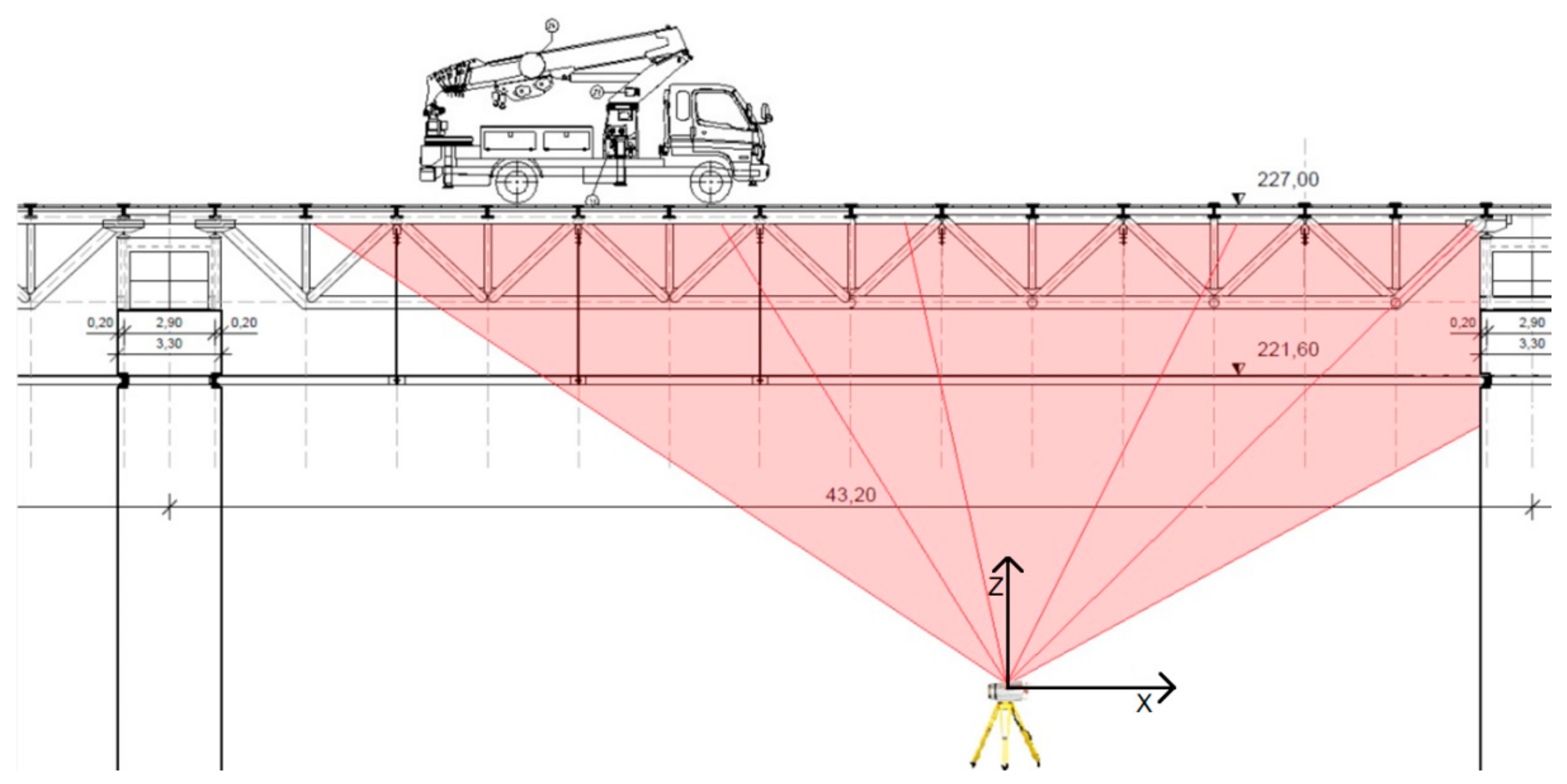
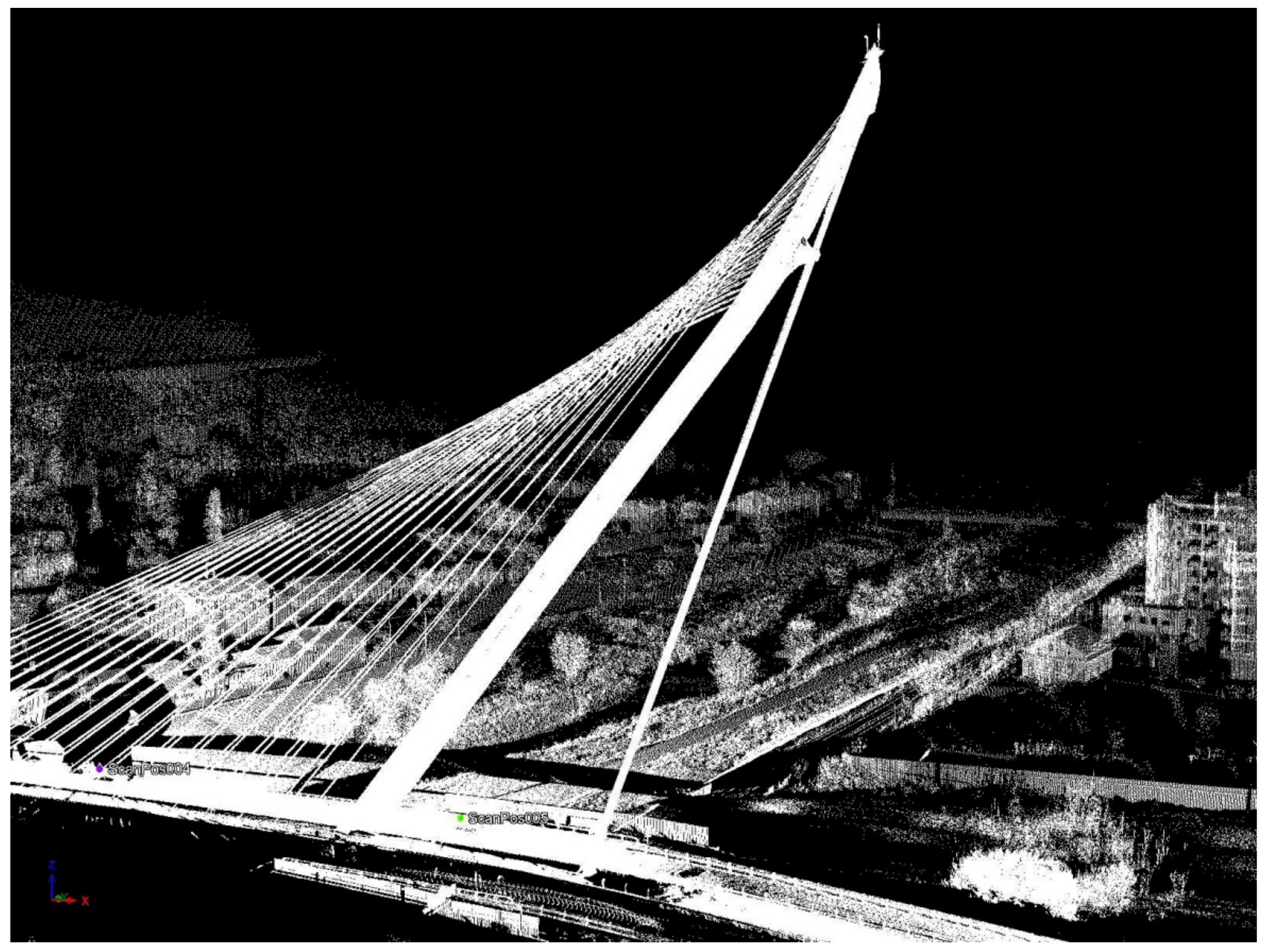
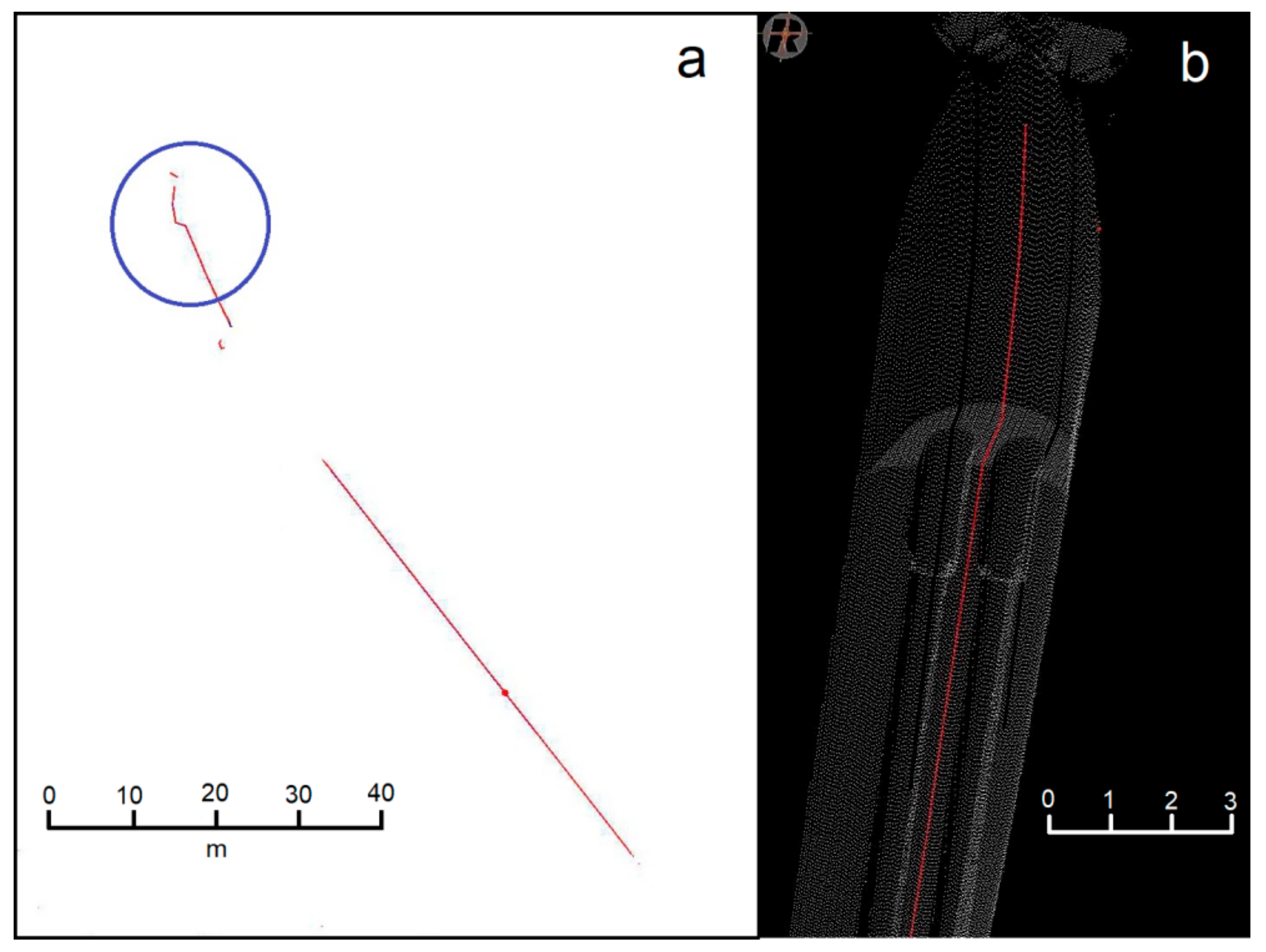
3.3. The Third Test: The Santiago Calatrava’s San Francesco Bridge at Cosenza
4. Discussion
Author Contributions
Funding
Conflicts of Interest
References
- Lantsoght, E.O.L.; der Veen, C.; Boer, A.; Hordijk, D.A. State-of-the-art on load testing of concrete bridges. Eng. Struct. 2017, 150, 2312–2341. [Google Scholar] [CrossRef] [Green Version]
- Zinno, R.; Artese, S.; Clausi, G.; Magarò, F.; Meduri, S.; Miceli, A.; Venneri, A. Structural Health Monitoring (SHM). In The Internet of Things for Smart Urban Ecosystems; Cicirelli, F., Guerrieri, A., Mastroianni, C., Spezzano, G., Vinci, A., Eds.; Springer International Publishing: Switzerland, Cham, 2019; pp. 225–249. [Google Scholar] [CrossRef]
- Fan, W.; Qiao, P. Vibration-based damage identification methods: A review and comparative study. Struct. Health Monit. 2011, 10, 83–111. [Google Scholar] [CrossRef]
- Malekjafarian, A.; McGetrick, P.J.; OBrien, E.J. A Review of Indirect Bridge Monitoring Using Passing Vehicles. Shock Vib. 2015, 2015, 286139. [Google Scholar] [CrossRef] [Green Version]
- Carpinteri, A.; Lacidogna, G.; Pugno, N. Structural damage diagnosis and life-time assessment by Acoustic Emission monitoring. Eng. Fract. Mech. 2007, 74, 273–289. [Google Scholar] [CrossRef]
- Davis, A.; Mirsayar, M.; Hartl, D. Structural health monitoring using embedded magnetic shape memory alloys for magnetic sensing. In Proceedings of the SPIE–International Society for Optics and Photonics, Nondestructive Characterization and Monitoring of Advanced Materials, Aerospace, Civil Infrastructure, and Transportation XIII, Bellingham, WA, USA, 4–7 March 2019; Gyekenyesi, A.L., Ed.; Volume 10971. [Google Scholar]
- Morris, I.; Abdel-Jaber, H.; Glisic, B. Quantitative Attribute Analyses with Ground Penetrating Radar for Infrastructure Assessments and Structural Health Monitoring. Sensors 2019, 19, 1637. [Google Scholar] [CrossRef] [Green Version]
- Artese, S.; Perrelli, M. Monitoring a Landslide with High Accuracy by Total Station: A DTM-Based Model to Correct for the Atmospheric Effects. Geosciences 2018, 8, 46. [Google Scholar] [CrossRef] [Green Version]
- Artese, G.; Perrelli, M.; Artese, S.; Manieri, F. Geomatics activities for monitoring the large landslide of Maierato, Italy. Appl. Geomat. 2015, 7, 171. [Google Scholar] [CrossRef]
- Lienhart, W.; Ehrhart, M.; Grick, M. High Frequent Total Station Measurements for the Monitoring of Bridge Vibrations. In Proceedings of the 3rd Joint International Symposium on Deformation Monitoring (JISDM), Vienna, Austria, 30 March–1 April 2016; Available online: https://www.fig.net/resources/proceedings/2016/ (accessed on 2 September 2019).
- Yu, J.; Zhu, P.; Xu, B.; Meng, X. Experimental assessment of high sampling-rate robotic total station for monitoring bridge dynamic responses. Measurement 2017, 104, 60–69. [Google Scholar] [CrossRef]
- Lovse, J.W.; Teskey, W.F.; Lachapelle, G.; Cannon, M.E. 7-Dynamic Deformation Monitoring of Tall Structure Using GPS Technology. J. Surv. Eng. 1995, 121, 35–40. [Google Scholar] [CrossRef]
- Roberts, G.W.; Meng, X.; Dodson, A.H. Integrating a global positioning system and accelerometers to monitor the deflection of bridges. J. Surv. Eng. 2004, 130, 65–72. [Google Scholar] [CrossRef]
- Yu, J.; Meng, X.; Shao, X.; Yan, B.; Yang, L. Identification of dynamic displacements and modal frequencies of a medium-span suspension bridge using multimode GNSS processing. Eng. Struct. 2014, 81, 432–443. [Google Scholar] [CrossRef]
- Jo, B.W.; Lee, Y.S.; Jo, J.H.; Khan, R.M.A. Computer Vision-Based Bridge Displacement Measurements Using Rotation-Invariant Image Processing Technique. Sustainability 2018, 10, 1785. [Google Scholar] [CrossRef] [Green Version]
- Baohua Shan, B.; Wang, L.; Huo, X.; Yuan, W.; Xue, Z. A Bridge Deflection Monitoring System Based on CCD. Adv. Mater. Sci. Eng. 2016, 2016, 4857373. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Brownjohn, J.M.W. Review of machine-vision based methodologies for displacement measurement in civil structures. J. Civil Struct. Health Monit. 2018, 8, 91. [Google Scholar] [CrossRef] [Green Version]
- Feng, D.; Feng, M.Q. Experimental validation of cost-effective vision-based structural health monitoring. Mech. Syst. Signal Process. 2017, 88, 199–211. [Google Scholar] [CrossRef]
- Yoneyama, S.; Ueda, H. Bridge Deflection Measurement Using Digital Image Correlation with Camera Movement Correction. Mater. Trans. 2012, 53, 285–290. [Google Scholar] [CrossRef] [Green Version]
- Pepe, M. Image-based methods for metric surveys of buildings using modern optical sensors and tools: From 2D approach to 3D and vice versa. Int. J. Civil Eng. Technol. 2018, 9, 729–745. [Google Scholar]
- Yan, Y.; Hang, L.; Dongsheng, L.; Xingquan, M.; Jinping, O. Bridge Deflection Measurement Using Wireless MEMS Inclination Sensor Systems. Int. J. Smart Sens. Intell. Syst. 2013, 6, 38–57. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Liu, H.; Yu, Y.; Xu, X.; Hu, W.; Li, M.; Ou, J. Bridge displacement monitoring method based on laser projection-sensing technology. Sensors 2015, 15, 8444–8463. [Google Scholar] [CrossRef]
- Artese, S.; Achilli, V.; Zinno, R. Monitoring of Bridges by a Laser Pointer: Dynamic Measurement of Support Rotations and Elastic Line Displacements: Methodology and First Test. Sensors 2018, 18, 338. [Google Scholar] [CrossRef] [Green Version]
- Jung, J.; Kim, D.-J.; Palanisamy Vadivel, S.K.; Yun, S.-H. Long-Term Deflection Monitoring for Bridges Using X and C-Band Time-Series SAR Interferometry. Remote Sens. 2019, 11, 1258. [Google Scholar] [CrossRef] [Green Version]
- Di Pasquale, A.; Nico, G.; Pitullo, A.; Prezioso, G. Monitoring Strategies of Earth Dams by Ground-Based Radar Interferometry: How to Extract Useful Information for Seismic Risk Assessment. Sensors 2018, 18, 244. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gordon, S.J.; Lichti, D.D. Modeling Terrestrial Laser Scanner Data for Precise Structural Deformation Measurement. J. Surv. Eng. 2007, 133, 72–80. [Google Scholar] [CrossRef]
- Truong-Hong, L.; Laefer, D.F. Using Terrestrial Laser Scanning for Dynamic Bridge Deflection Measurement. In Proceedings of the IABSE Istanbul Bridge Conference, Istanbul, Turkey, 11–13 August 2014; ISBN 978-605-64131-6-2. [Google Scholar]
- Artese, S. Survey, diagnosis and monitoring of structures and land using geomatics techniques: Theoretical and experimental aspects. In Geomatics Research 2016; Vettore, A., Ed.; AUTeC: Caldogno, Italy, 2017; pp. 31–42. ISBN 978-88-905917-9-2. [Google Scholar]
- Chen, W.; Lui, E. Handbook of Structural Engineering, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2005; p. 1768. ISBN 9780849315695. [Google Scholar]
- Gordon, S.J.; Lichti, D.D.; Chandler, I.; Stewart, M.P.; Franke, J. Precision Measurement of Structural Deformation using Terrestrial Laser Scanners. In Proceedings of the Optical 3D Methods, Zurich, Switzerland, 22–25 September 2003; Gruen, A., Kahmen, H., Eds.; [Google Scholar]
- Madeo, A.; Casciaro, R.; Zagari, G.; Zinno, R.; Zucco, G. A mixed isostatic 16 dof quadrilateral membrane element with drilling rotations, based on Airy stresses. Finite Elem. Anal. Des. 2014, 89, 52–66. [Google Scholar] [CrossRef]
- Stradeanas.it. Available online: https://www.stradeanas.it/it/calabria-strada-statale-107-l%E2%80%99anas-prosegue-il-monitoraggio-delle-condizioni-statiche-del-viadotto (accessed on 30 September 2019).
- Wittfoht, H. Ursachen fur den Teil-Ensturz des “Viadotto Cannavino” bei Agro di Celico. Beton Stahlbetonbau 1983, 78, 29–36, ISSN 0005-9900. [Google Scholar] [CrossRef]
- Artese, S. The Survey of the San Francesco Bridge by Santiago Calatrava in Cosenza, Italy. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2019, XLII-2/W9, 33–37. [Google Scholar] [CrossRef] [Green Version]
- Artese, G.; Perrelli, M.; Artese, S.; Meduri, S.; Brogno, N. POIS, a Low Cost Tilt and Position Sensor: Design and First Tests. Sensors 2015, 15, 10806–10824. [Google Scholar] [CrossRef] [Green Version]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Feature | Values/Availability |
|---|---|
| Max Measurement Range | 1400 m |
| Effective Measurement Rate | 29,000 to 122,000 meas/s |
| Precision | 5 mm |
| Accuracy | 8 mm |
| Vertical Scan Angle Range | +60°/−40° |
| Scan Speed | 3 lines/sec to 120 lines/s |
| GPS Receiver | Integrated L1 antenna |
| Compass | Integrated |
| Internal Sync Timer | Integrated real time synchronized time stamping of scan data |
| Multiple Target Capability | Yes |
| Laser Plummet | Integrated |
| Beam Divergence | 0.3 mrad |
| Technical Feature | Values/Availability |
|---|---|
| Angular accuracy | 1” |
| Pinpoint EDM accuracy | 1 mm + 1 ppm |
| Measurement range without prism | 1000 m |
| Measurement range with a prism | 3500 m |
| Automatic Target Recognition | |
| (ATR) accuracy | 1” |
| Visible Laser Pointer | YES |
| Feature | Value |
|---|---|
| Type | Single-lens reflex digital camera |
| Effective pixels | 24.3 million |
| Image sensor | Nikon FX format 35.9 × 24.0 mm—DX format 24 × 16 mm |
| File format | NEF (RAW), JPEG, NEF (RAW) + JPEG |
| Lens | NIKKOR 18–55 mm f/3.5–5.6 G VR |
| Shutter | Electronically-controlled vertical-travel focal-plane shutter |
| ISO sensitivity | ISO 100 to 6400 in steps of 1/3 or 1/2 EV |
| HD frame and frame rate | 1920 × 1080 pixels; 30 p (progressive), 25 p, 24 p |
| GP-1 unit providing Coordinated Universal Time (UTC). | YES |
| Event | GPS Time (s) |
|---|---|
| Start of TLS acquisitions | 1,200,220,888 |
| Start of first Truck | 1,200,221,072 |
| Stop of first Truck | 1,200,221,098 |
| Start of second Truck | 1,200,221,186 |
| Stop of second Truck | 1,200,221,214 |
| Start of third Truck | 1,200,221,243 |
| Stop of third Truck | 1,200,221,268 |
| Stop of TLS acquisitions | 1,200,221,500 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Artese, S.; Zinno, R. TLS for Dynamic Measurement of the Elastic Line of Bridges. Appl. Sci. 2020, 10, 1182. https://doi.org/10.3390/app10031182
Artese S, Zinno R. TLS for Dynamic Measurement of the Elastic Line of Bridges. Applied Sciences. 2020; 10(3):1182. https://doi.org/10.3390/app10031182
Chicago/Turabian StyleArtese, Serena, and Raffaele Zinno. 2020. "TLS for Dynamic Measurement of the Elastic Line of Bridges" Applied Sciences 10, no. 3: 1182. https://doi.org/10.3390/app10031182
APA StyleArtese, S., & Zinno, R. (2020). TLS for Dynamic Measurement of the Elastic Line of Bridges. Applied Sciences, 10(3), 1182. https://doi.org/10.3390/app10031182