1. Introduction
In recent years, the domestic security industry market has developed rapidly. As intelligence becomes a major trend in the industry, intelligent security has gradually become the direction of the transformation and upgrading of security companies, and its proportion in the security industry will become increasingly larger. In 2019, the market size of China’s security industry was approximately 720 billion yuan. It is estimated that in 2020, intelligent security will create a market worth about 100 billion yuan, and intelligent security will be an important market in the security field. There is a wide range of applications of the Internet of Things in smart cities, civil security, and some focusing industries. Among these, biometric technology is one of the most important critical technologies. Face recognition technology research based on big data systems is of great significance. With the technology of big data and artificial intelligence developing rapidly, the big data environment not only provides a good basis for the in-depth development of face recognition systems but also realizes the sharing of feature databases in wider fields, which is helpful for achieving more abundant face feature databases. Therefore, face recognition and artificial intelligence are connected and interact safely and seamlessly with big data systems, which have become an important technical support in social security systems. Intelligent security robots with a face recognition function are being developed. This kind of intelligent security robot will be used in many public places to accurately scan human facial features, make judgments, and record personal data and behaviors in the cloud and feed back to the background. It is superior to the traditional surveillance camera and has great practical significance for the development of the security industry.
The current biometric technology [
1] includes face recognition, fingerprint recognition, palm print recognition, iris recognition, etc. Face recognition is the focus of researchers in the fields of pattern recognition and computer vision. It has the characteristics of noncontact and non-aware biometrics, compared with other biometric technologies such as fingerprint recognition and iris recognition. Currently, most face recognition devices are mainly based on two-dimensional images [
2], but these devices are susceptible to ambient light, background, and shooting angle. In order to overcome this shortcoming, the technologies of geometric information and relative position information, which belong to the technologies of three-dimensional (3D) face images, are widely used because of their relatively more stable nature. Mainstream 3D imaging technologies include stereo vision, structured light [
3], time of flight (TOF), and binocular ranging. Therefore, face recognition based on 3D face data achieves a more accurate recognition result. In the context of big data, it can quickly and accurately automatically recognize human faces and apply face recognition technology to the perception system of security robots. We show a new method for face recognition for intelligence security in this paper.
To recognize 3D faces, we must first preprocess the reconstructed 3D face images. In the study of image processing, a method of describing a digital image as a vector in terms of a frequency histogram of graphs and mapping the image into a vector space through a graph transformation is presented [
4]. There is also a method in which an image is encoded by a region adjacency graph (RAG), based on multicolored neighborhood (MCN) clustering algorithm [
5]. Three-dimensional face recognition is divided into two parts: measurement and algorithm. As an important three-dimensional measurement method, grating projection measurement has the advantages of noncontact, low cost, and high precision and is widely used in industrial detection, reverse engineering, biomedicine, virtual reality, and other fields [
6,
7]. The projected grating phase method was first proposed by Tskeda [
8] in 1982. Information on object height is obtained by demodulating the fringes that are previously modulated by the height on the surface of the object in this method. Common fringe projection measurement techniques include phase measuring profilometry (PMP) [
9,
10], Fourier transform profilometry (FTP) [
11], and Moire profilometry (MP). Compared to Fourier transform profilometry and convolutional demodulation, phase measurement profilometry requires more fringe patterns and slightly longer acquisition time. However, PMP has advantages such as a simpler solving process, fewer computations, and a resistance to the background influence. The method directly finds the phase value in fringe patterns through mathematical calculations, and thus, we use PMP for the wrap phase in fringe patterns. The frequency of phase shifts determines speed and accuracy. Fewer phase shifts lead to a faster speed, but the accuracy is lower. Accordingly, more phase shifts help improve the accuracy it may reach, but the speed is slower. Considering the two factors of speed and accuracy, we use a four-step phase-shift method as the demodulation method of the fringe phase. We use an improved Goldstein branching method for a better quality of phase unwrapping patterns and achieve practical significance for the accuracy of 3D reconstruction in human faces.
There are also many researches on algorithms for 3D face recognition. The algorithm introduced by Vezzetti et al. [
12] automatically recognizes six basic facial expressions (anger, disgust, fear, joy, sadness, and surprise) by dividing the face image into 79 regions and comparing the feature values obtained in each region with a threshold. In a study by Marcolin et al. [
13], an algorithm is explored for face recognition by using geometric descriptors (such as mean, Gaussian, path, shape index, curvature, and coefficients of basic form) to extract 3D facial features and analyze them. In a study by Nonis and colleagues [
14], a method which combines 2D and 3D facial features is used for facial expression analysis and recognition. In our daily life, the faces of criminal suspects are often blocked through camouflage, which causes certain difficulties in face recognition. Aiming at this problem, a detection method and repair strategy are proposed by providing a database and corresponding experiment [
15]. Generally speaking, these 3D face recognition algorithms are divided into the following three main categories: spatial-based direct matching, overall feature matching, and local feature matching. Spatial-based direct matching directly performs similarity matching on surfaces without the extraction of features. Commonly used matching methods include iterative closest point (ICP) [
16] and the Hausdorff distance method [
17]. It has a good effect on the matching of rigid surfaces, but it is susceptible to expression changes since the human face is a nonrigid surface. Overall feature matching focuses on the overall features of 3D faces. Those methods include the apparent matching based on depth patterns and methods based on the extended Gaussian image (EGI). Local feature matching mainly extracts local features of human faces for matching. Beumier and Acheroy [
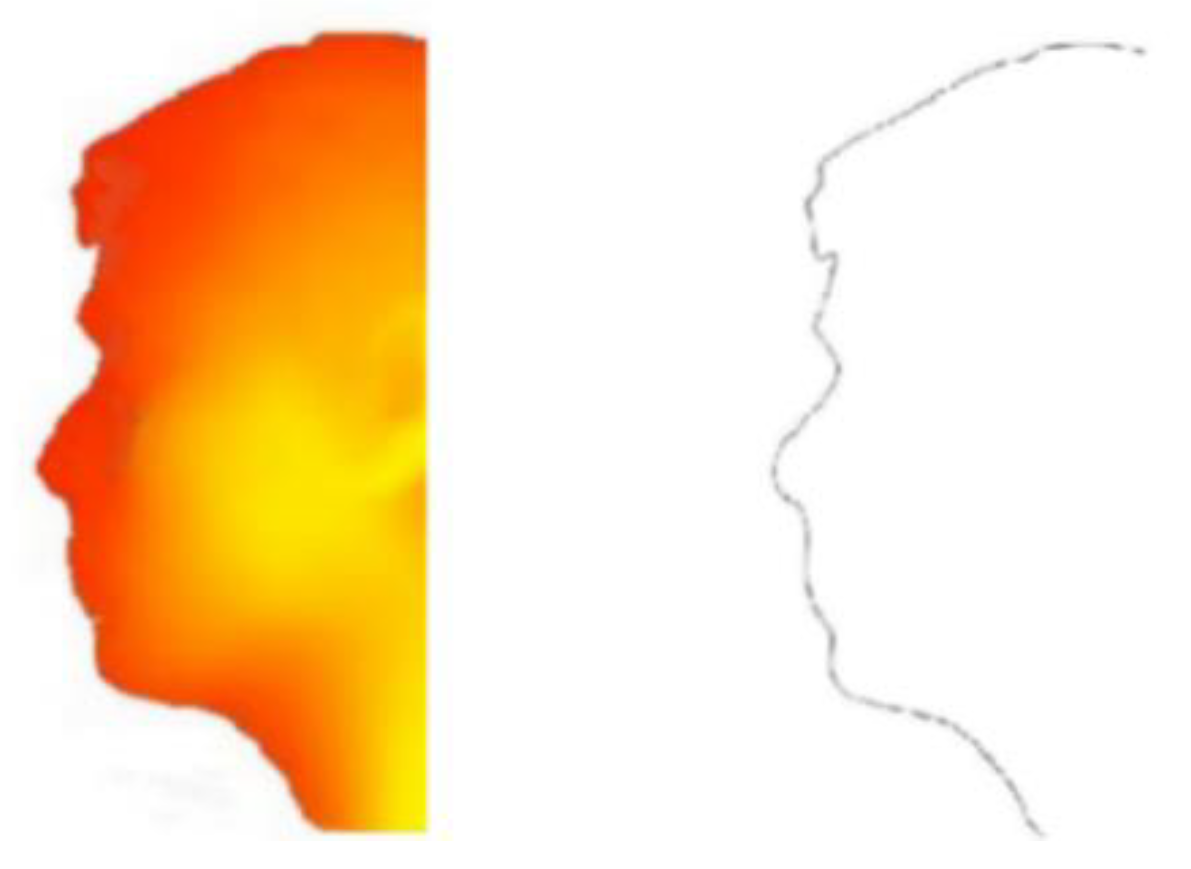
18] extracted the center contour line through the most prominent point on the curves of human faces and two contour lines parallel to it and obtained similarities among three contour lines by comparing the curvature values on the selected contour lines. Further fusion among them then resulted in the similarity of the human face. However, this method only extracts three curves on human faces, which thus leads to a severe loss of curvature information and a relatively narrower representation. Samir et al. [
19] extracted equal-depth contours on the depth pattern of human faces and calculated the geodesic distance between the equal-depth contours of the test face and the library set face on the Riemann space as their matching similarity. Berretti et al. [
20] divided human faces into several equal geodetic areas according to the geodesic distance between points on the curved surface and nose-tip, and then used the positional relationship between the points on the corresponding geodetic areas for face recognition. Gökberket al. [
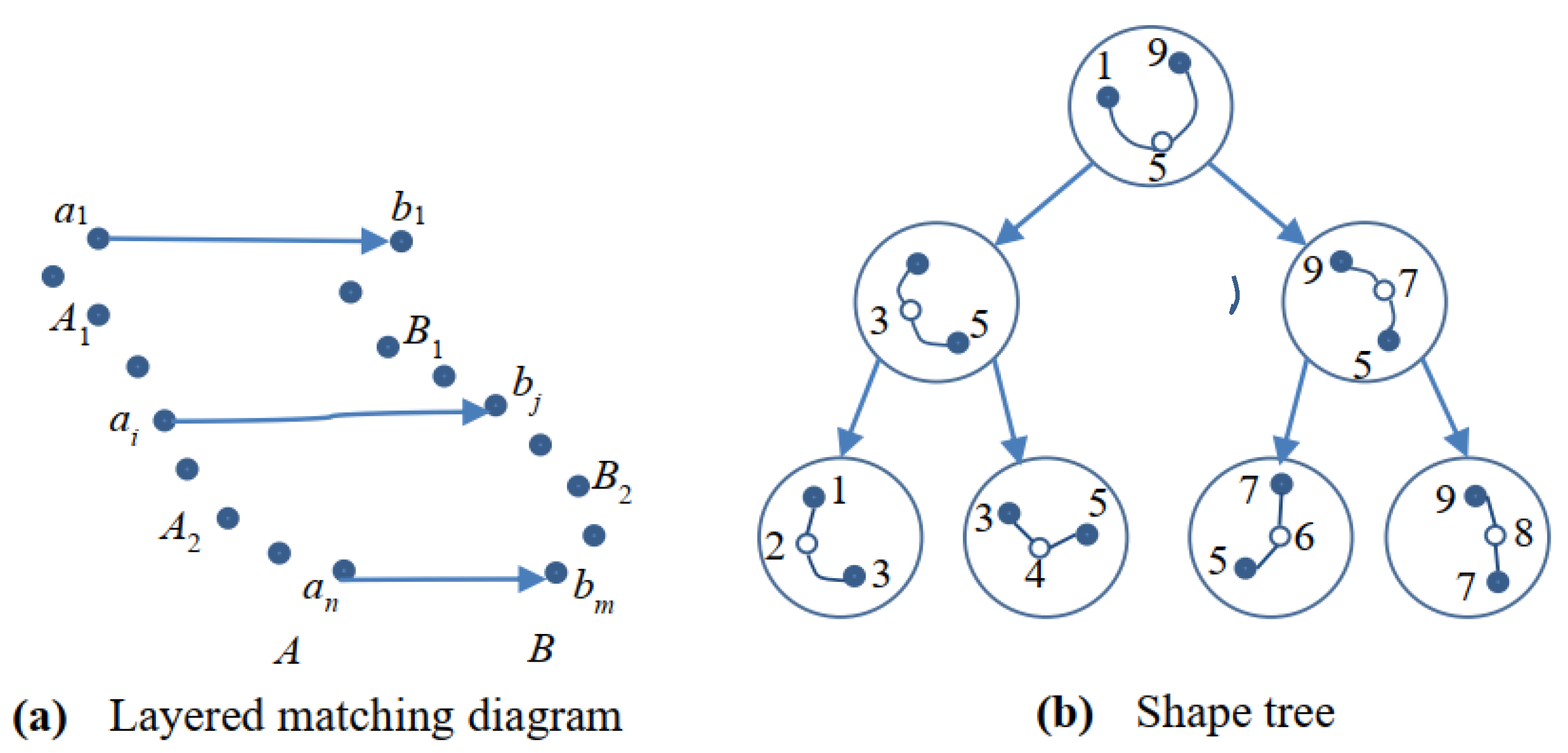
21] extracted seven vertical contour curves on human faces and calculated the similarity between each corresponding curve. Then, the similarities were merged into a total similarity for face recognition. Therefore, we extract the side contour, horizontal contour, and other radial curves from the nose-tip point on the reconstructed 3D face and apply improved layered elastic matching and corresponding point-spacing matching. According to different influences of facial expressions in human faces, the method assigns different weights to different curve recognition similarities for a weighted fusion and thus obtains its total similarity for identification. This method achieves higher face reconstruction efficiency and recognition performance in the context of big data.
The rest of this paper is organized as follows. We introduce the 3D face recognition system in
Section 2. Then we show the 3D face reconstruction method based on a grating projection method in
Section 3. In
Section 4 we propose the 3D face recognition method. In
Section 5, experiments are carried out for verification, and the result of the method is presented.
3. Related Work
3.1. Optimized Goldstein Branching Method
The four-step phase-shift method is used as the demodulation method of the fringe phase in this paper, which modulates the grating fringe pattern projected onto the surface of the object, and then the phase unwrapping [
22] is calculated. Common spatial phase algorithms for phase unwrapping include: row and column expansion, Goldstein branching [
23], discrete cosine transform least squares (DCT), and Fourier transform least squares. Traditional Goldstein branching methods can eliminate the inconsistency of the phase unwrapping results due to the different integral paths and thus avoid the propagation of errors. However, the established branching tangent line is relatively long, and the phase may be incapable of unfolding due to the formation of a loop in areas with denser residual points. Therefore, to reduce the sum of the lengths of all branch tangent lines, we propose an improved Goldstein branching method, which combines the positive and negative residual points in the interferogram and uses the sum of the lengths of the tangent lines as the evaluation value to replace and re-establish the positive and negative residual points in the interferogram, which can effectively overcome the “island phenomenon” that is prone to occur in areas with denser residual points when the phase is unwrapped.
The Goldstein branching method connects and balances the residual points on the interferogram to find the branching tangent lines that need to be avoided when the phase is unwrapped. When the strategy of connecting residual points to branches differs, the branching tangent lines differ, and phase unwrapping will also have different results. To create a better effect on phase unwrapping, the length of branching tangent lines should be as short as possible, and the connection distance between the positive and negative residual points should be short as well. The probability of residual point occurrence is 1/100 to 1/1000 of the two interference images with a correlation value between 0.3 and 0.5. Assuming that the number of positive and negative residual points is N, then there are N! combinations. If the image is large, there will be many calculations for the optimal combination.
The steps of the optimized Goldstein branching method are as follows:
- (1)
Identify the positive and negative residual points in the two-dimensional interferogram and mark the position of the residual points in the residual point map.
- (2)
Take the positive residual point as the center and search within the radius of 5. If a negative residual point is found within the range, the pair of positive and negative residual points is defined as a “near-point pair”. If there is not any corresponding negative residual point within the range, this positive residual point is defined as a “far point”.
- (3)
Center on the “far point” and gradually expand the search radius until all “far points” have found their negative residual points to become “far point pairs”.
- (4)
Take the positive residual point of the “far point pair” as the center and carry out the search again. The search radius here is the length of the branching tangent line of the “far point pair”. Replace and re-establish all “near-point pairs” and “far point pairs” within the radius. The principle of replacement is based on whether the value of the function (fitness) is reduced, and the evaluation value (fitness) is shown in Equation (1).
- (5)
If the evaluation value does not decrease after the replacement, replace the combination of the positive and negative residual points in the search radius and repeat step (4).
- (6)
Perform steps (4) and (5) for all “far point pairs”.
As the fitness continues to decrease, the length of the branching tangent line also decreases. The above steps are repeated for all those virtually combined branch tangent lines until the evaluation value no longer decreases and tends to converge.
Through the aforementioned operation, the sum of the combined distances of the residual points tends to be the shortest, and the optimized branching tangent lines are obtained. If the replacements in step (3) are counted as an average of K times, all those calculations will require a total of K × N operations. Since K << N, the number of calculations will be greatly reduced compared to N!.
In MATLAB, we use the peaks function as the measured object, and the results obtained after phase unwrapping are shown in
Table 1. To simulate some of the interference in the measurement environment, we added a uniform noise with a mean of 0 and a variance of 1.1258.
It can be seen that the Goldstein branching method partially failed to unwrap and forms unexpanded regions. The time takes longer by the least squares method. The improved branch cutting method makes the expansion effect better through a shorter branch tangent by connecting the positive and negative residual points. Thus, the optimized Goldstein branching method makes the results of 3D reconstruction more accurate and contributes to subsequent processing and use.
3.2. 3D Human Face Reconstruction
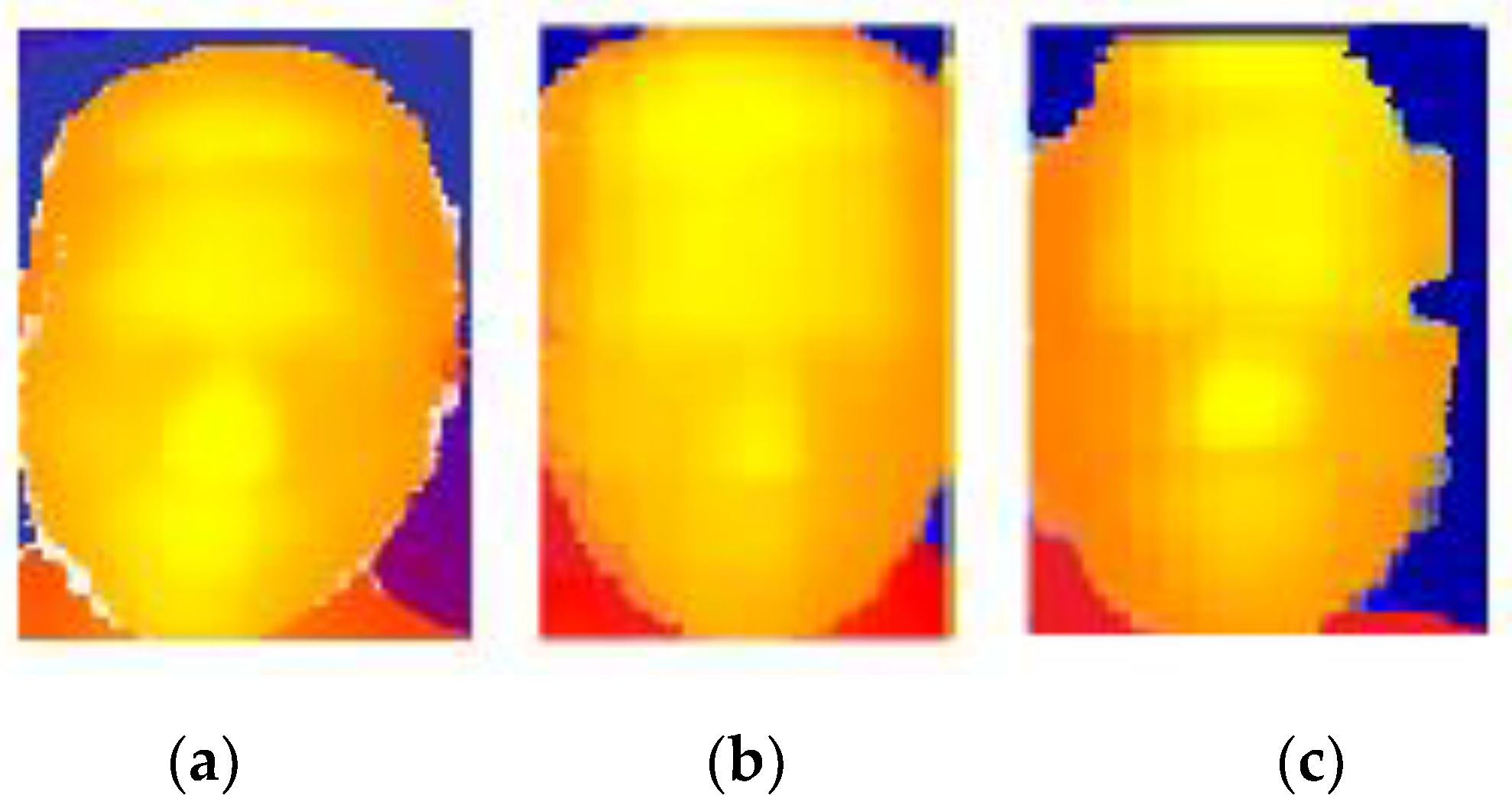
More accurate calculations are required for face recognition, and the quality of the image directly affects the accuracy of the recognition. Additionally, the number of projected fringes directly affects the accuracy of the wrapped phase values, which then affect the quality of the image. When the number of fringes is too large, the distance between them is very narrow. If the resolution of the projection device or the acquisition device cannot meet its requirements, the projected image or the fringe pattern obtained is severely deformed. Severely deformed fringe patterns result in serious errors in 3D face recognition. Therefore, to achieve more accurate 3D face feature positioning and recognition, we attempt to find the influence of the number of fringes on the reconstruction of 3D shapes using fringe patterns with different fringe numbers of 32, 64, and 128, respectively. The images collected are shown in
Figure 4 and the reconstructed face image is shown in
Figure 5.
It can be seen that when the number of fringes is 32, the projected image is not deformed, and a 3D face image with better quality is obtained; however, some details are missing in the image. When the number of fringes is 128, there are too many fringes in the projected image, which causes its deformation, and thus, the obtained 3D face image is severely deformed. When the number of fringes is 64, the projected image is not deformed, and the quality of the 3D face image is the best among the three images, with more details recovered in the human face. These details can make 3D face feature positioning and recognition more precise. Therefore, we chose the fringe pattern with 64 fringes.
The efficiency of 3D face reconstruction is significantly improved after the improvement of the branching method and the selection of the best number of fringes.
5. Experimental Results and Analysis
The experimental environment in this paper is shown in
Figure 10 and is composed of a projector, camera, and computer. Both the camera and the projector are connected to the computer. The projector is a product of SHARP, with a resolution of 1280 × 720 and a brightness of 2000 lumens; it is lightweight and small-sized and thus suitable for our measurement environment. The camera is powered by Canon, with a resolution of 1920 × 1080. It is easy to place in a variety of measurement environments. The Central Processing Unit (CPU) model of the computer is Core i7-8550U, and the software used in this experiment is MATLAB R2018a.
In this experiment, 60 sets of images is collected in the natural light and darkness, and the different poses of 30 faces is tested. The background of the image is a white wall. A neutral face of each person is selected as the library set, and the remaining faces are used as a test set, forming an all vs. neutral experiment.
The 3D face reconstruction effect is better when the number of projected stripes is 64. Then, a set of four-step phase-shift diagrams are generated by the computer, as shown in
Figure 11. The four-step phase-shift method is used to solve the wrapped phase value of each point in the image from the deformed stripe image, and the face wrapped phase diagram is obtained, as shown in
Figure 12. The optimized branch cutting method is used to obtain the unrolled phase diagram of the object, and the 3D face image is reconstructed according to the phase height relationship, as shown in
Figure 13.
Figure 14 shows the reconstructed 3D face images in various postures.
When the layered matching is used for rank recognition alone, the recognition rate is 91.5%. Additionally, when the point-distance matching is used for rank recognition alone, the recognition rate is 76.5%. The layered elastic matching contains the local and global features of the curve, but since the method only uses the two-dimensional coordinate information of the sampling points and discards their one-dimensional information, the recognition rate is not ideal. The point-distance matching further uses the spatial distance of the sampling points relative to the nose-tip point. The recognition rate here may be lower, but it retains the spatial three-dimensional information well, which helps in the shortcomings of layered elastic matching. In this paper, we use a combination of point-distance matching and the layered elastic matching and obtain a higher recognition rate. The cumulative match characteristic (CMC) curves of the three experiments are shown in
Figure 15.
To compare the performance of the face recognition method based on grating projection, we compare this method with other methods.
Table 2 lists the recognition rates and speeds for iterative closest point (ICP), subspace pursuit (SP) and local binary pattern (LBP). It can be seen that the recognition rate of this method is higher, and the speed is faster, and it has better recognition performance.
Table 3 shows the identification of the method in this paper under different lighting conditions. Among the 120 three-dimensional face images with different facial attitudes under natural light, 116 images are accurately identified with a recognition rate of 96.67%. The rate has been dropped by 0.82% compared to the recognition in the dark environment. The recognition rate in both natural light and dark environment is above 90%, which indicates that the 3D face recognition method based on grating projection in this study has little influence from natural light.
In the experiment, we considered images in different attitudes. It can be seen from
Figure 16 that the overall recognition rate of the proposed method is higher than that of the Gabor-based face recognition method [
28] and that of the LBP algorithm [
29].



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}