Measurement and Modeling of 3D Solar Irradiance for Vehicle-Integrated Photovoltaic




Abstract
:Featured Application
Abstract
1. Introduction
2. Model
- Greater chance of shading by objects around the car (trees and buildings)
- Curved surface
- The orientation angle randomly varies
- Mismatching loss by partial shading
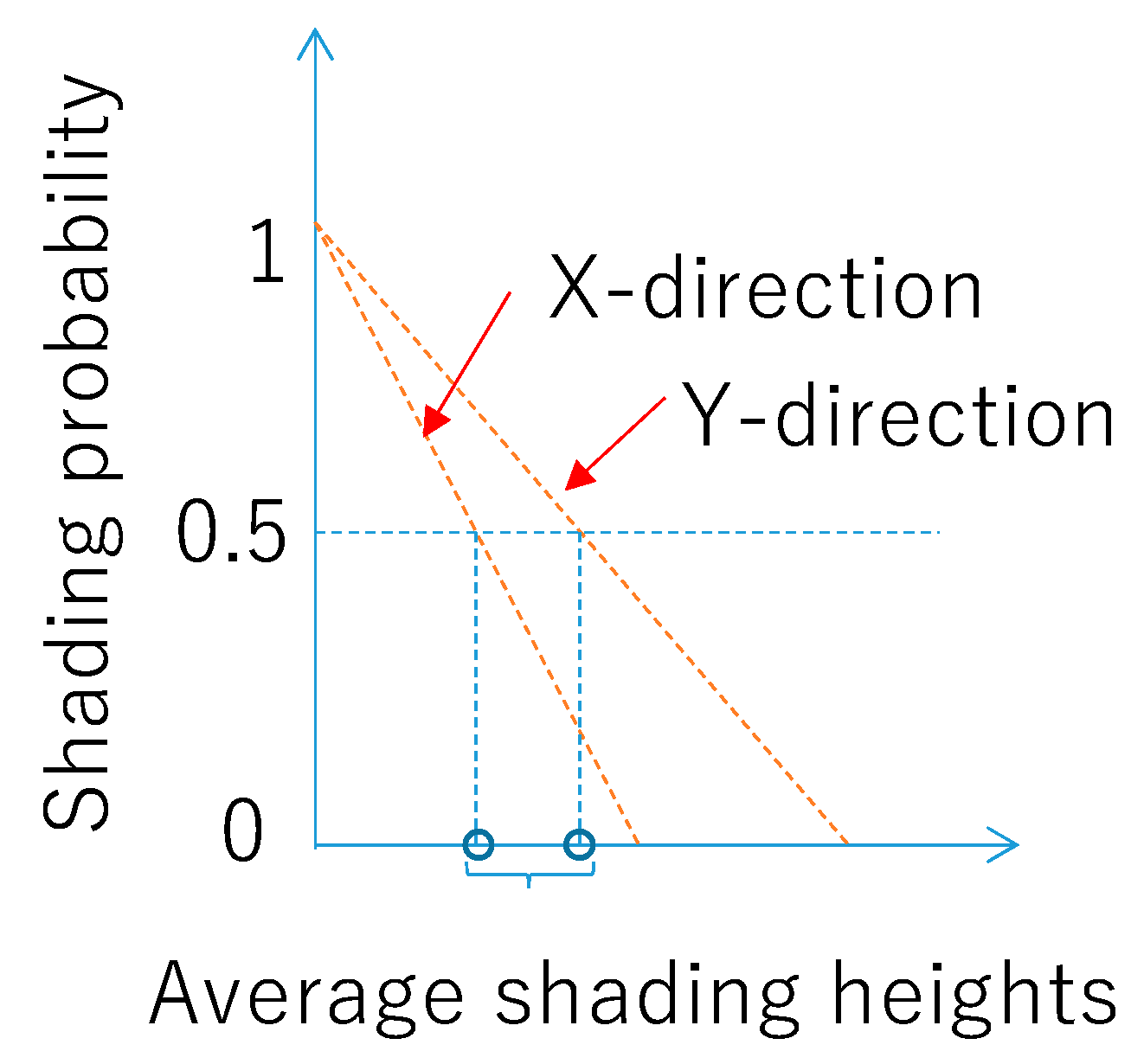
2.1. Shading Probability
2.2. 3D Irradiance Model
2.3. Relation to the Conventional Solar Irradiance Model
2.4. Angular Distribution Model
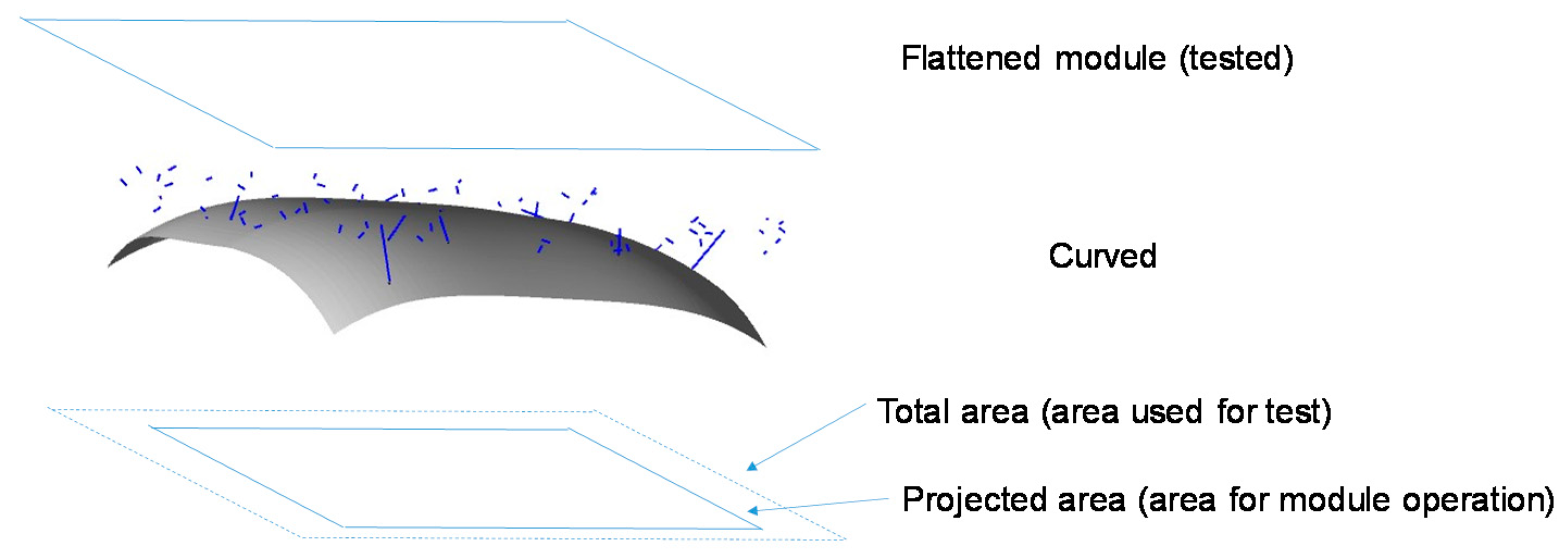
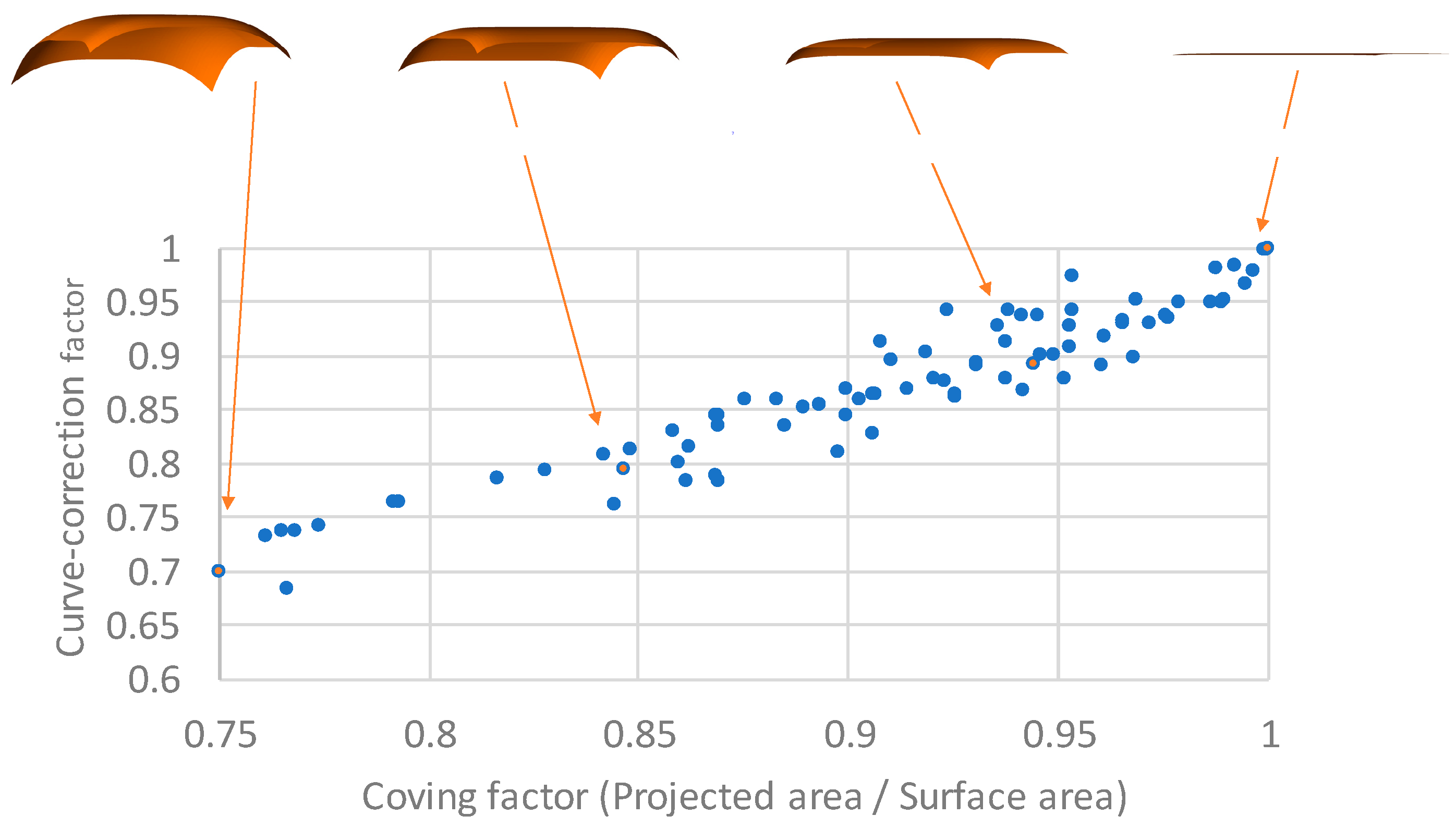
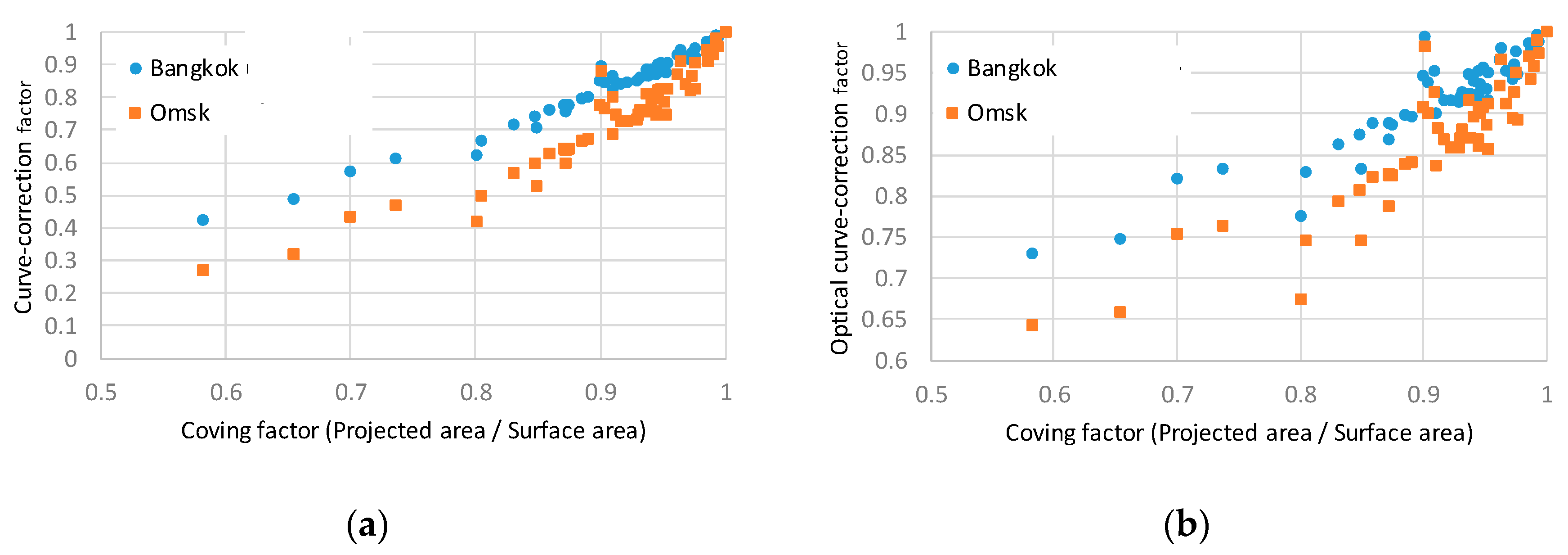
2.5. Curve Correction Model
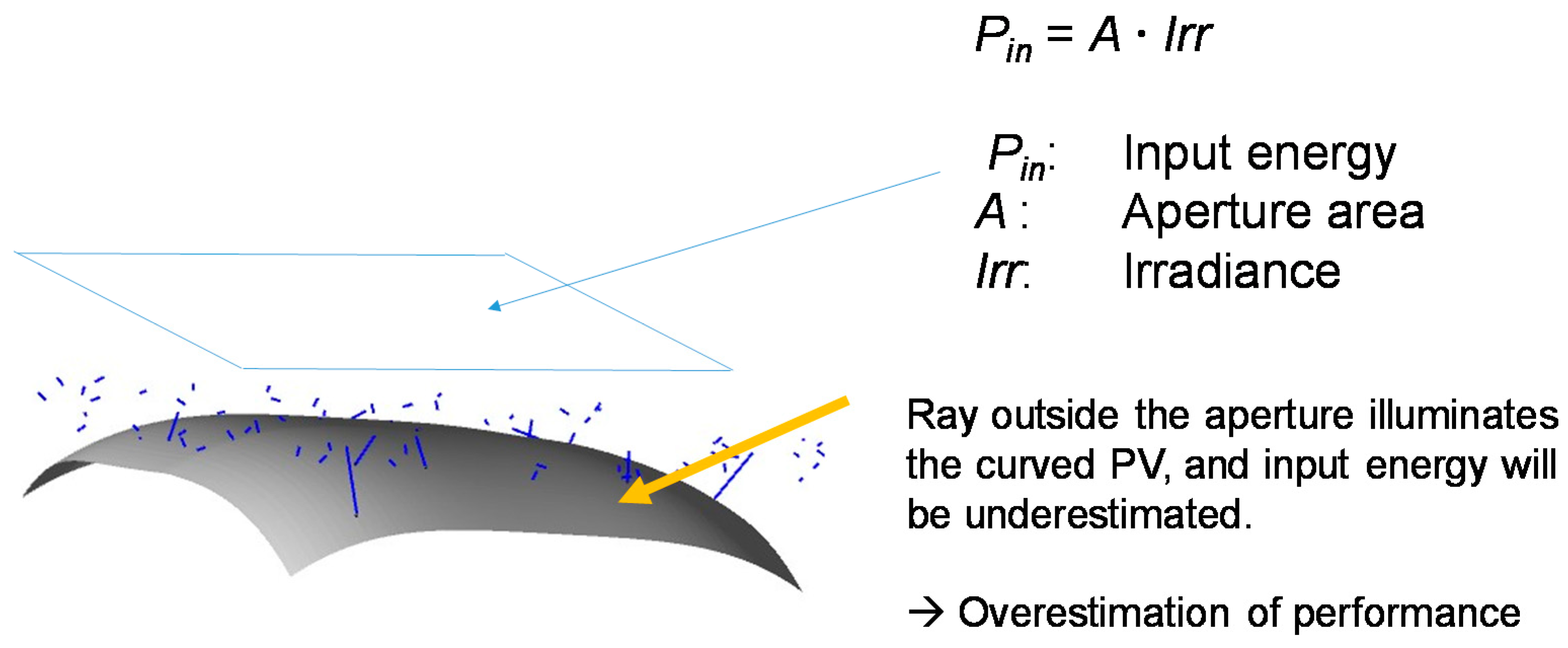
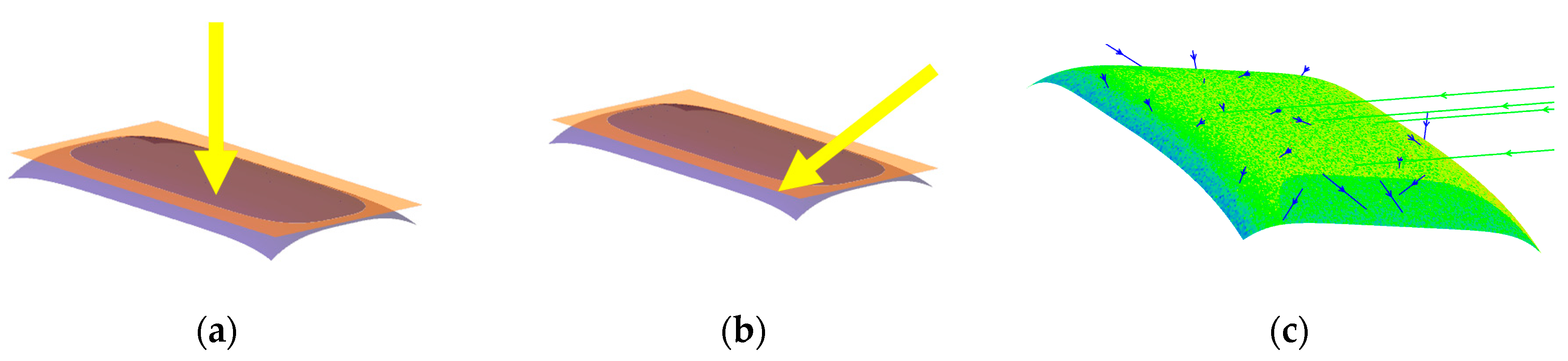
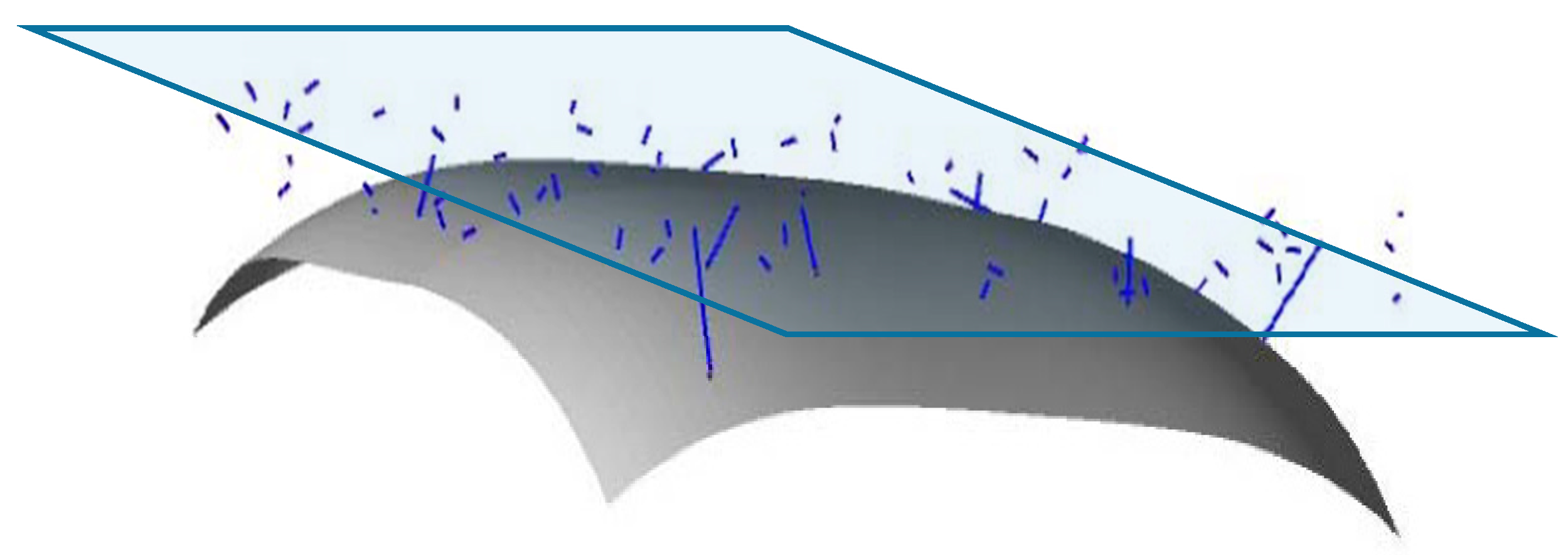
2.5.1. Why the Curved PV Modules are Often Overestimated in Efficiency Measurements
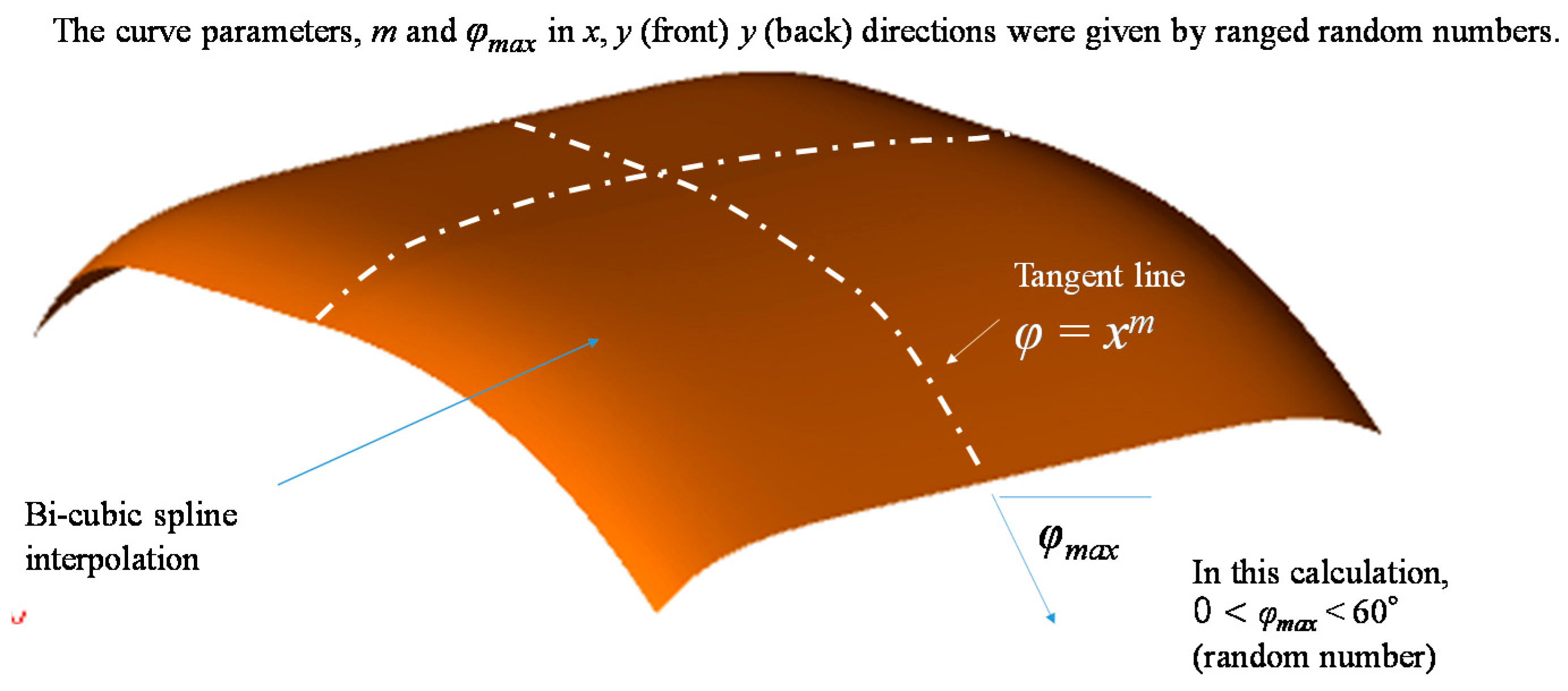
2.5.2. Examples of the Curve-Correction Calculations
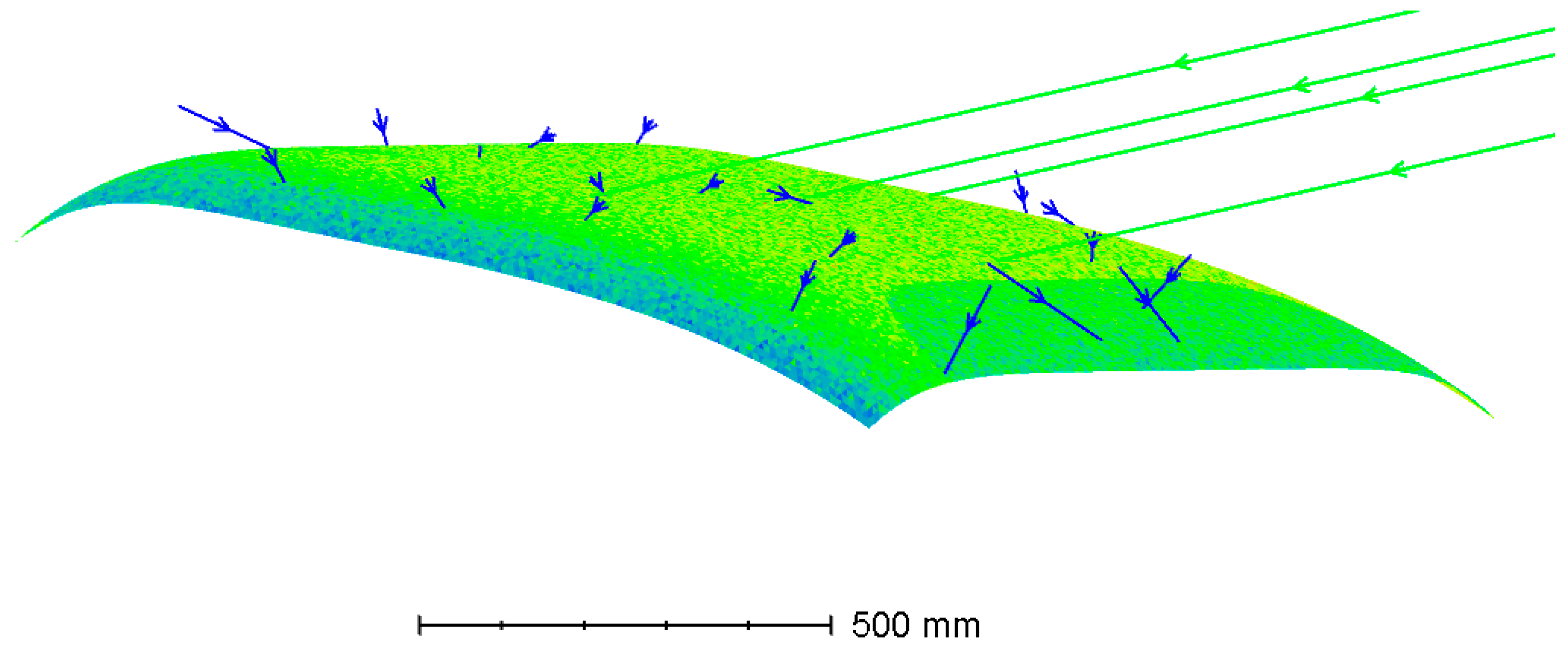
2.5.3. Curve-Correction Calculation Based on Ray-Tracing Simulation
2.6. Partial and Dynamic Shading Model
- In the sun
- Full shade
- Partial shade

3. Results
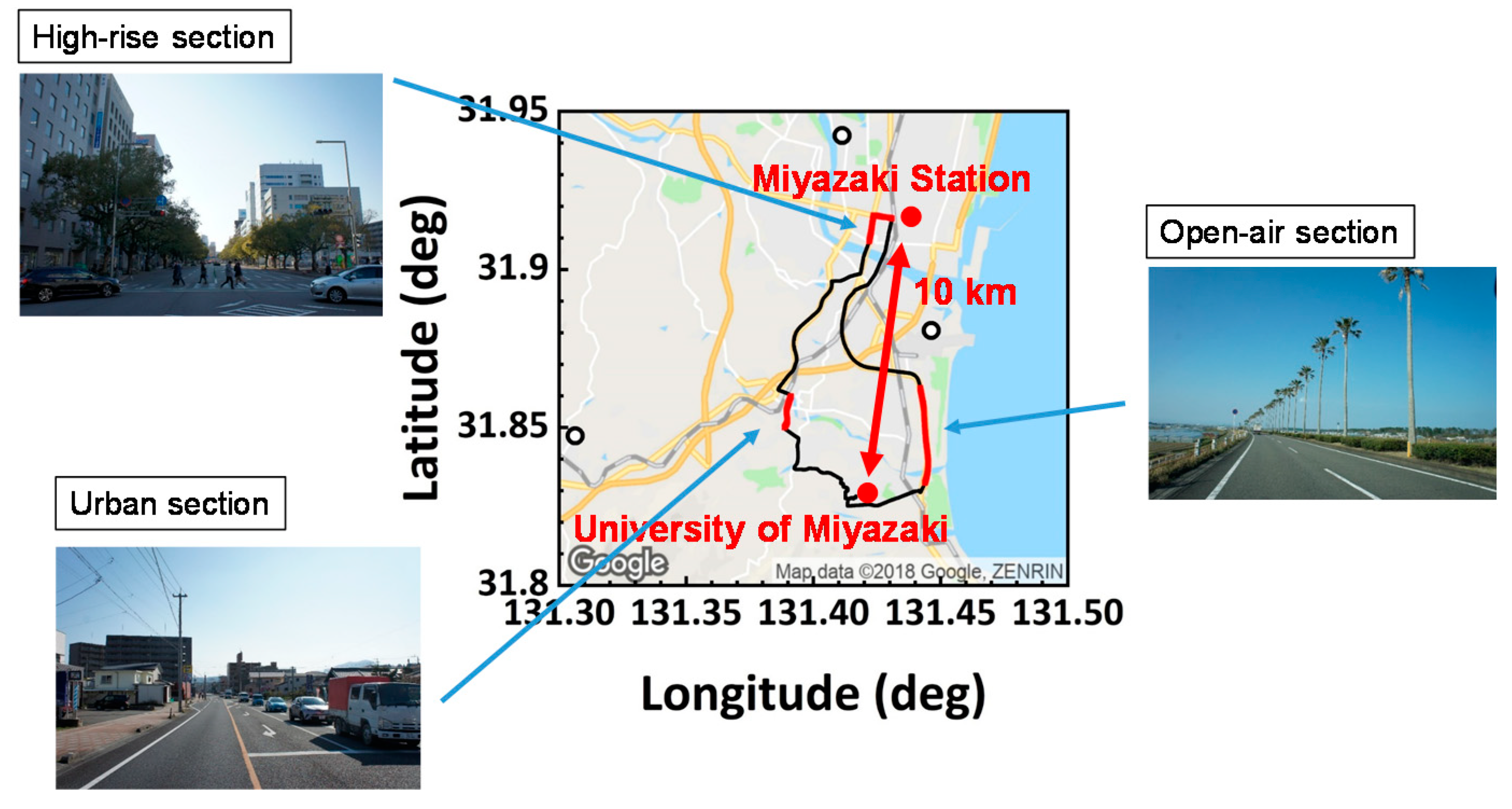
3.1. 3D Measurement by Multiple Pyranometer Array
3.2. Measurement Example of the Solar Irradiance on the Car Roof and Car Side
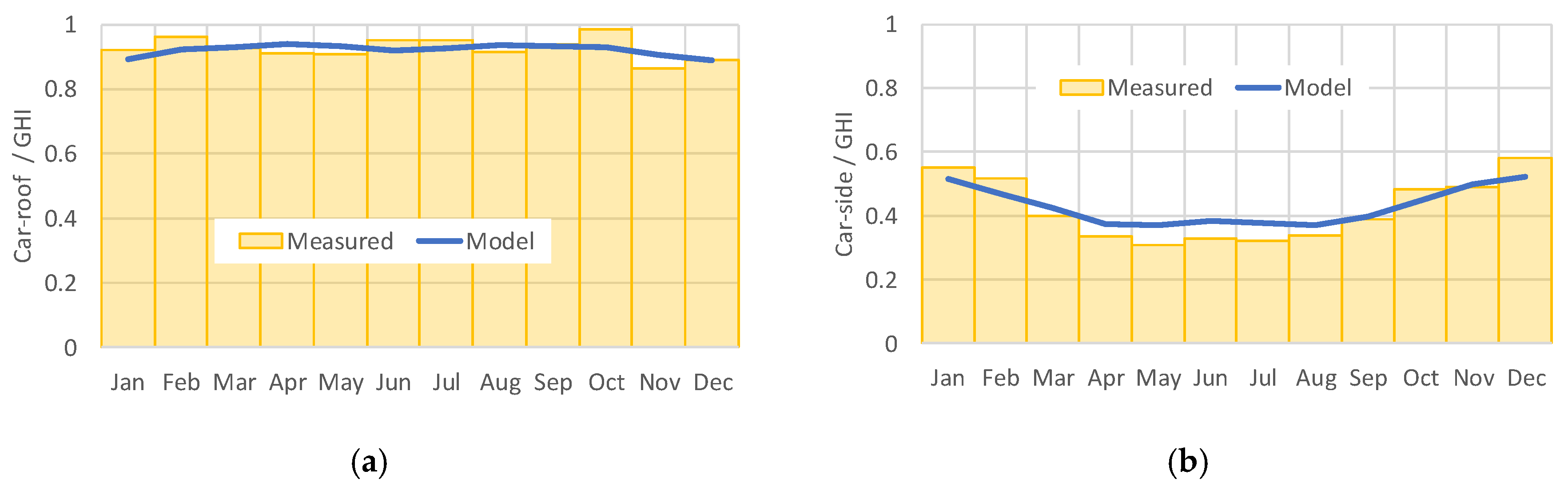
3.3. Validation of the Solar Irradiation Model around the Car (Intensity)
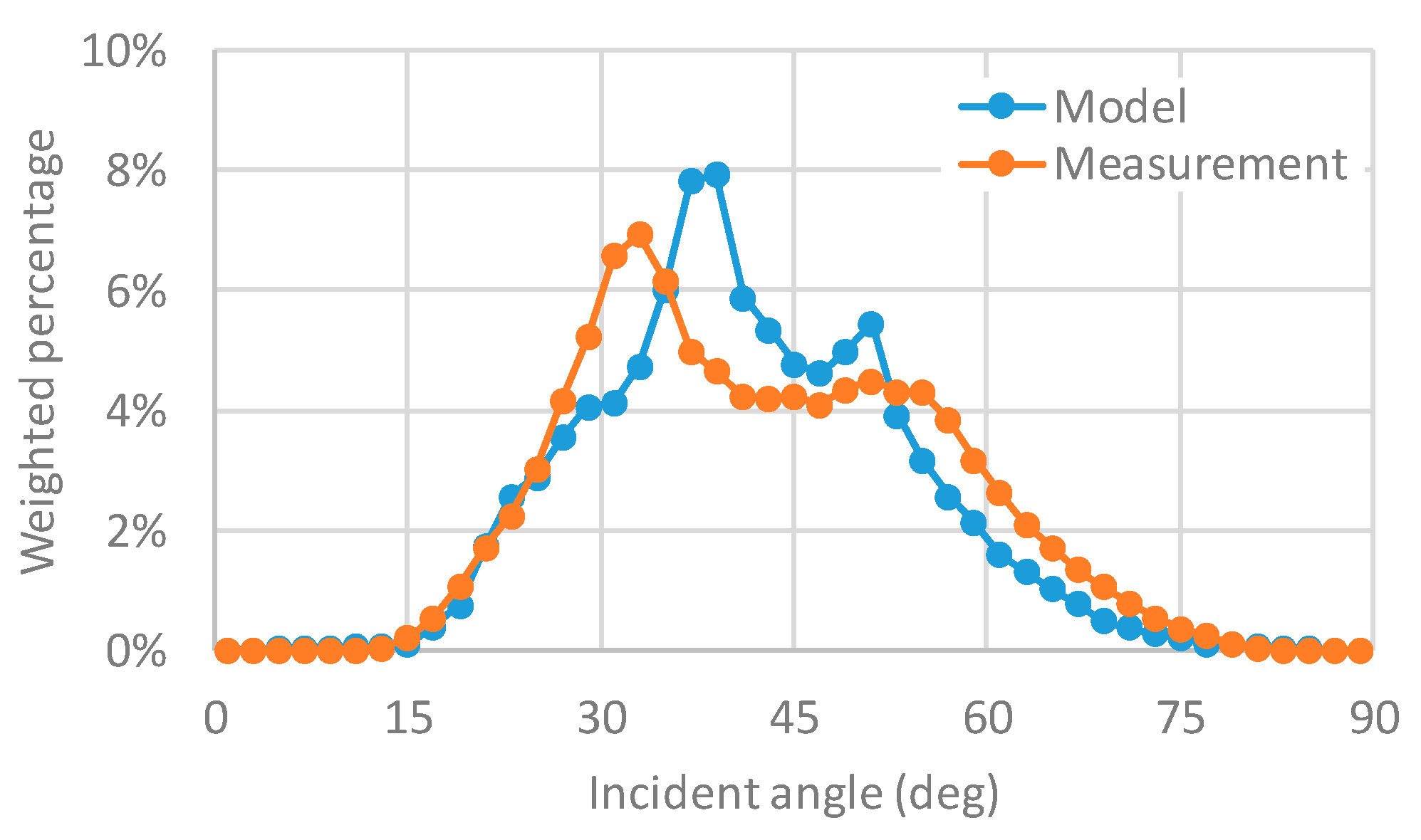
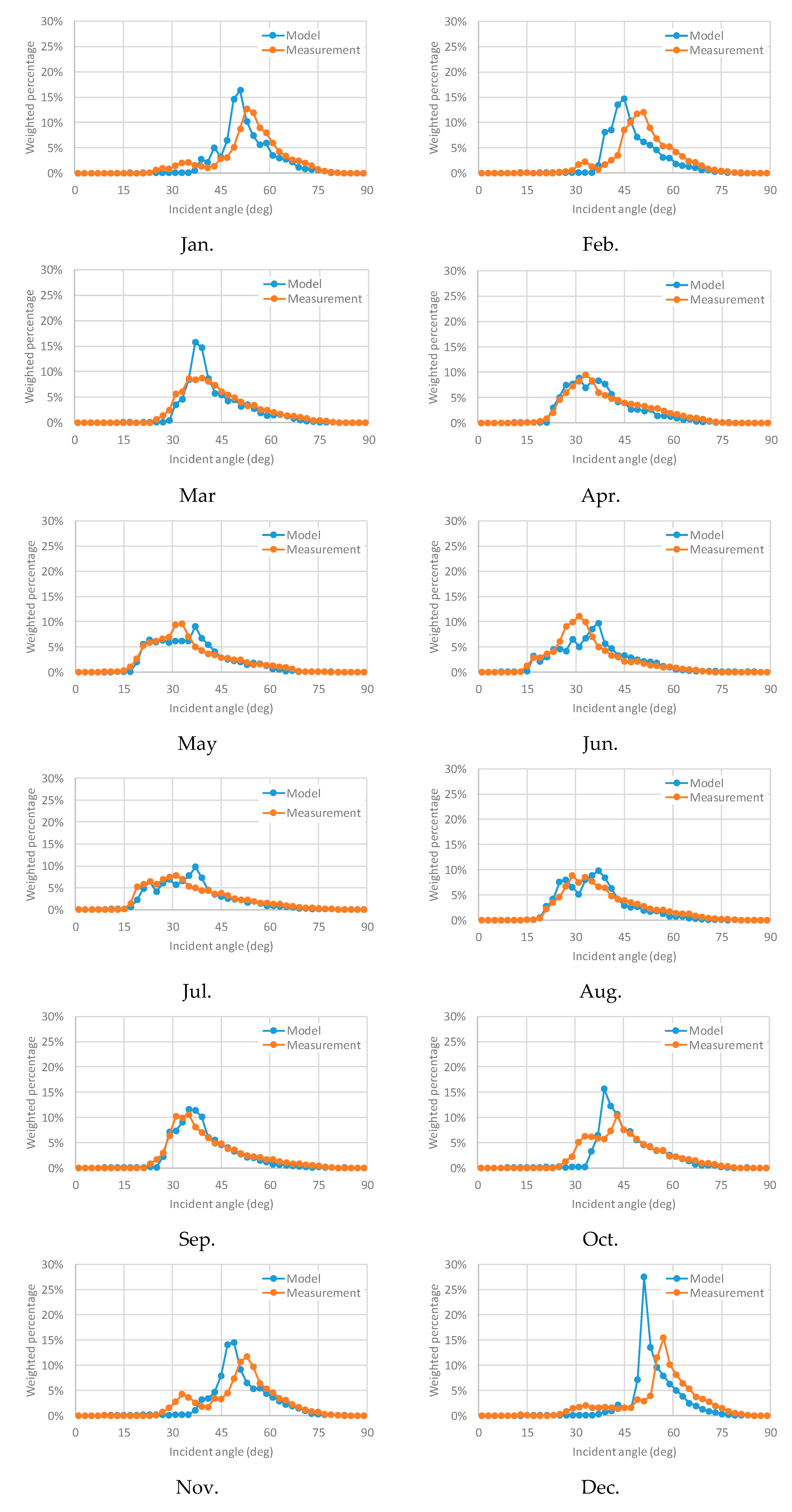
3.4. Validation of the Solar Irradiation Model around the Car (Angle)
4. Discussion
4.1. Simplified Rating Method of VIPV Considering 3D Solar Irradiance
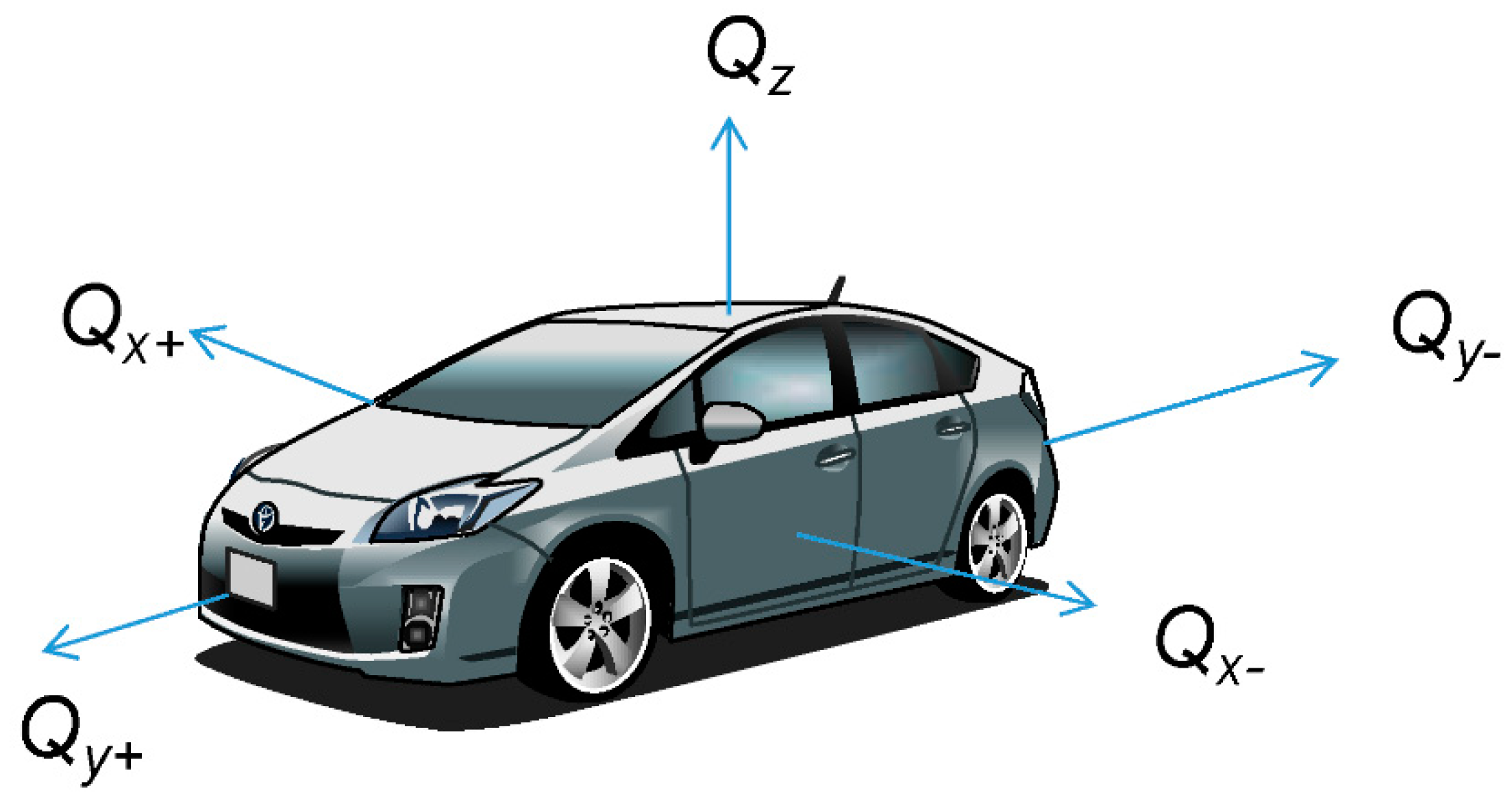
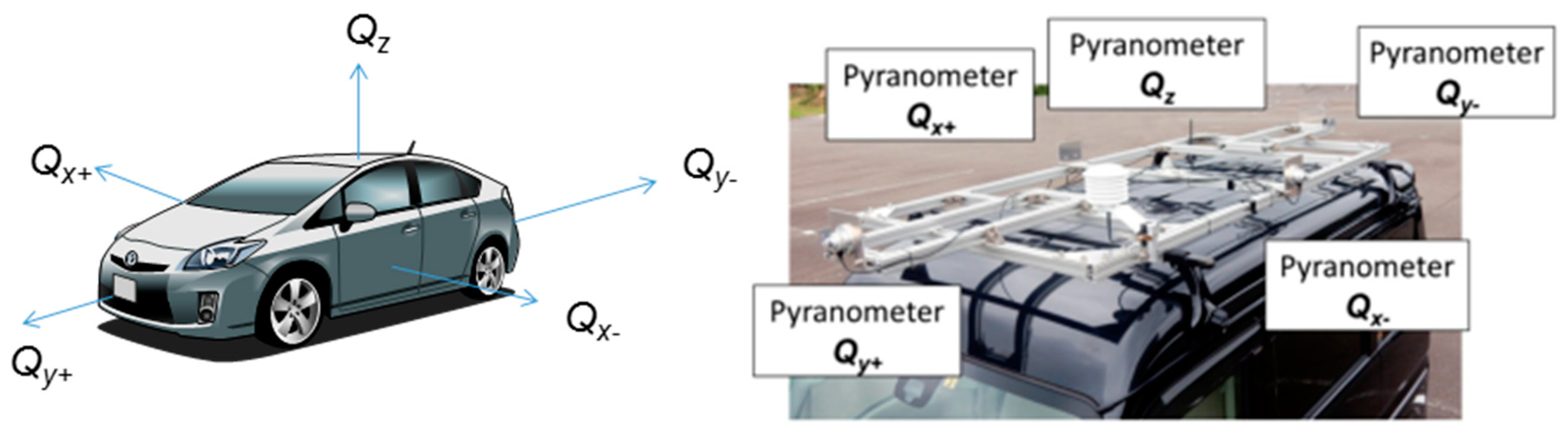
- Measure the PV performance in five directions (see Figure 2).
- The rating of the total performance in the specific area can be weighted by the normalized solar resources using Equation (23) and the values in Table 2, namely,where P is the rated power output. Pz is the measured power output by the illumination on the car roof. Px+, Px−, Py+, and Py1 are the measured power outputs by the illumination on the car sides in the direction defined in Figure 1. a, b, and c are weighting coefficients given by Table 2. Note that the coefficients a, b, and c in our measurement in Miyazaki, Japan are 0.925, 0.395, and 0.435, respectively. Equation (21) gives a total energy output of the entire PV system on the vehicle considering 3D solar irradiance around the vehicle comparable to GHI.
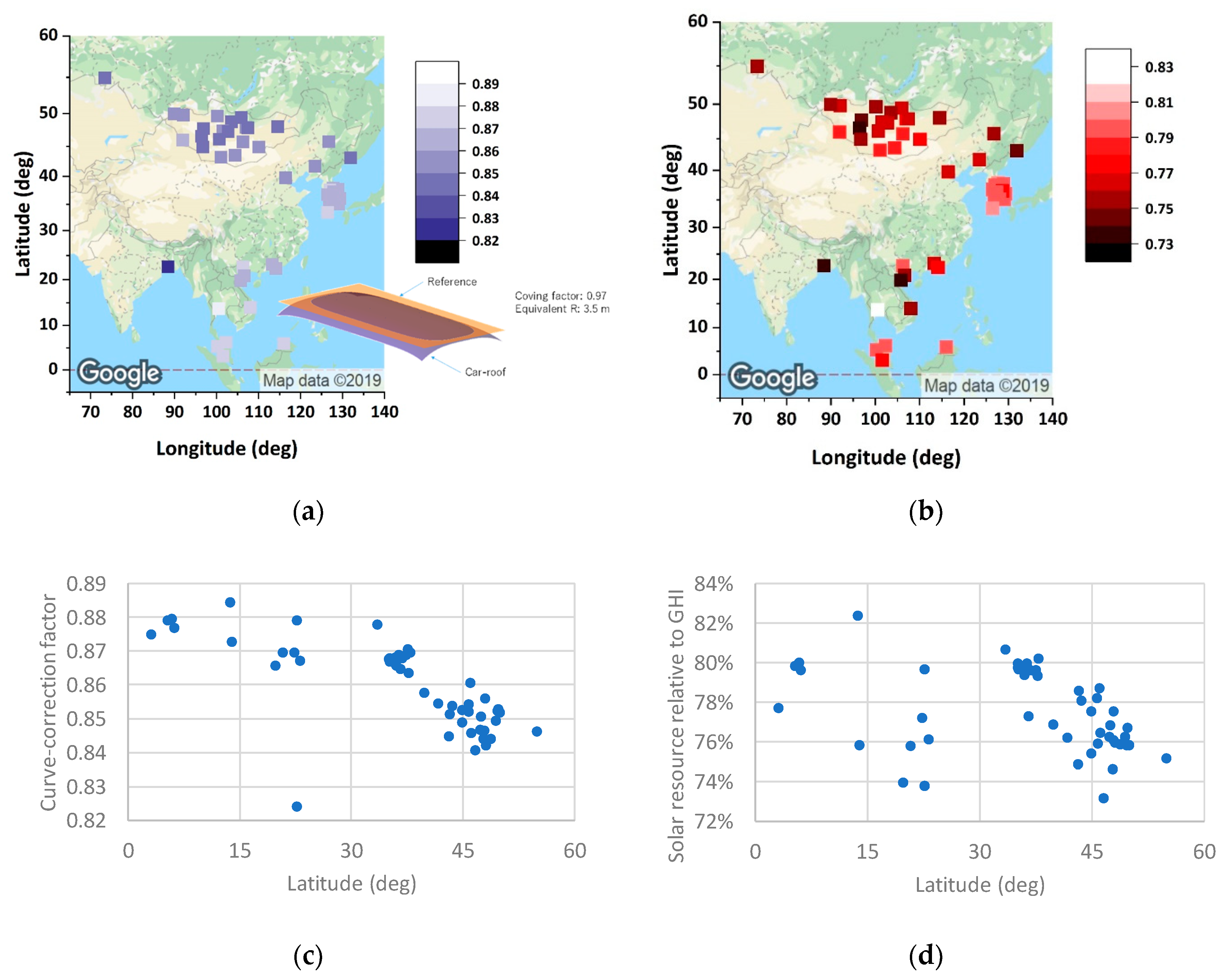
4.2. Estimation of the Practical Solar Resource to VIPV in Other Regions
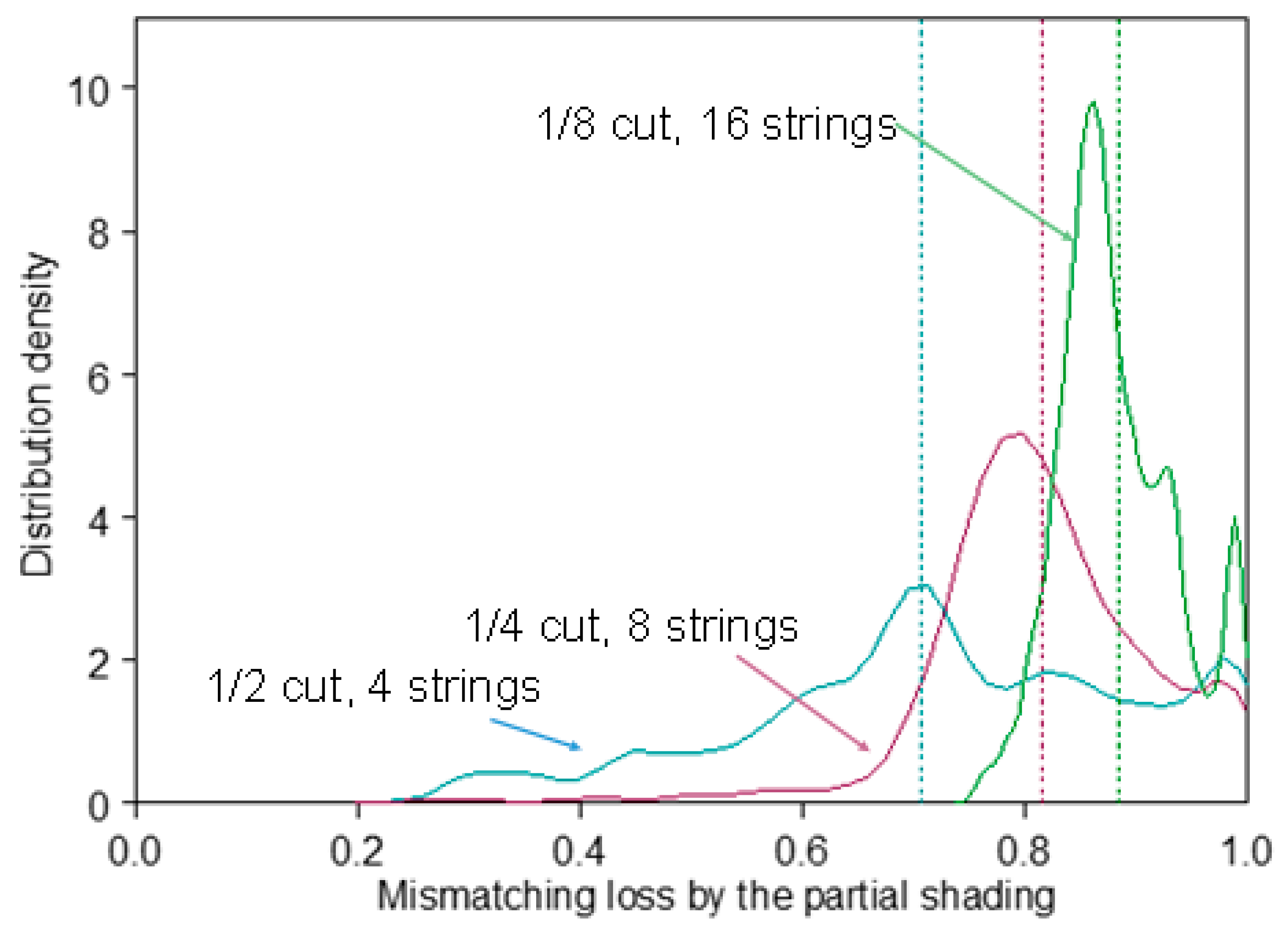
4.3. Partial Shading Issue
4.4. Limitation of the Model
4.5. Feasibility of the VIPV Based on Our Measurement and Modeling
4.6. Future Works
- Improvement of the shading model. The current model is useful but too simplified, especially in the urban area. Note that more than 45° of the average shading height is not allowed, because the maximum height becomes more than 90°. Even in the area of Miyazaki, the average height of 15.5° means that the maximum height should be 31°. However, there are many buildings of more than 31°. Possibly, we need to develop a curved trend, namely the two parameters model.
- Modeling of partial shading validated to the measured data. To do this, we need to start monitoring the partial shading on the car roof and car body.
- Validation of energy yield using the real curved PV module.
- Validation of the shading model by several areas with different shading height and shading density.
- Development of the spectrum model for predicting energy yield by multi-junction solar cells on the car roof and car body.
5. Conclusions
- A simple shading model to VIPV was developed and validated by one-year monitoring on the solar irradiation on the car roof and car body in five axes.
- The curve-correction model of the curved surface of VIPV was developed.
- A mismatching model using Monte Carlo simulation was developed to analyze the partial shading of VIPV.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Araki, K.; Ji, L.; Kelly, G.; Yamaguchi, M. To Do List for Research and Development and International Standardization to Achieve the Goal of Running a Majority of Electric Vehicles on Solar Energy. Coatings 2018, 8, 251. [Google Scholar] [CrossRef] [Green Version]
- Masuda, T.; Araki, K.; Okumura, K.; Urabe, S.; Kudo, Y.; Kimura, K.; Nakado, T.; Sato, A.; Yamaguchi, M. Static concentrator photovoltaics for automotive applications. Sol. Energy 2017, 146, 523–531. [Google Scholar] [CrossRef]
- NEDO. Interim Report of the Exploratory Committee on the Automobile Using Photovoltaic System. Available online: http://www.nedo.go.jp/news/press/AA5_100909.html (accessed on 9 May 2018).
- Masuda, T.; Araki, K.; Okumura, K.; Urabe, S.; Kudo, Y.; Kimura, K.; Nakado, T.; Sato, A.; Yamaguchi, M. Next environment-friendly cars: Application of solar power as automobile energy source. In Proceedings of the IEEE 43rd Photovoltaic Specialists Conference (PVSC), Portland, OR, USA, 5–10 June 2016; pp. 580–584. [Google Scholar]
- Araki, K.; Sato, D.; Masuda, T.; Lee, K.H.; Yamada, N.; Yamaguchi, M. Why and how does car roof PV create 50 GW/year of new installations? Also, why is a static CPV suitable to this application? In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2019; Volume 2149, p. 050003. [Google Scholar]
- Stutzmann, M. Role of mechanical stress in the light-induced degradation of hydrogenated amorphous silicon. Appl. Phys. Lett. 1985, 47, 21–23. [Google Scholar] [CrossRef]
- Moeini, I.; Ahmadpour, M.; Mosavi, A.; Alharbi, N.; Gorji, N.E. Modeling the time-dependent characteristics of perovskite solar cells. Sol. Energy 2018, 170, 969–973. [Google Scholar] [CrossRef]
- Lindroos, J.; Savin, H. Review of light-induced degradation in crystalline silicon solar cells. Sol. Energy Mater. Sol. Cells 2016, 147, 115–126. [Google Scholar] [CrossRef]
- Meyer, E.L.; Van Dyk, E.E. Assessing the reliability and degradation of photovoltaic module performance parameters. IEEE Trans. Reliab. 2004, 53, 83–92. [Google Scholar] [CrossRef]
- Letendre, S.; Perez, R.; Herig, C. Vehicle integrated PV: A clean and secure fuel for hybrid electric vehicles. In Proceedings of the Solar Conference; American Solar Energy Society: Boulder, CO, USA; American Institute of Architects: Washington, DC, USA, 2003; pp. 201–206. [Google Scholar]
- De Pinto, S.; Lu, Q.; Camocardi, P.; Chatzikomis, C.; Sorniotti, A.; Ragonese, D.; Iuzzolino, G.; Perlo, P.; Lekakou, C. Electric vehicle driving range extension using photovoltaic panels. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Hangzhou, China, 17–20 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Kim, J.; Wang, Y.; Pedram, M.; Chang, N. Fast photovoltaic array reconfiguration for partial solar powered vehicles. In Proceedings of the International Symposium on Low Power Electronics and Design, La Jolla, CA, USA, 11–13 August 2014; pp. 357–362. [Google Scholar]
- Alhammad, Y.A.; Al-Azzawi, W.F. Exploitation the waste energy in hybrid cars to improve the efficiency of solar cell panel as an auxiliary power supply. In Proceedings of the 10th International Symposium on Mechatronics and its Applications (ISMA), Sharjah, UAE, 8–10 December 2015; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Fujinaka, M. The practically usable electric vehicle charged by photovoltaic cells. In Proceedings of the 24th Intersociety Energy Conversion Engineering Conference, Washington, DC, USA, 6–11 August 1989; IEEE: Piscataway, NJ, USA, 2002; pp. 2473–2478. [Google Scholar]
- Ezzat, M.F.; Dincer, I. Development, analysis and assessment of a fuel cell and solar photovoltaic system powered vehicle. Energy Convers. Manag. 2016, 129, 284–292. [Google Scholar] [CrossRef]
- Araki, K.; Ota, Y.; Nishioka, K.; Tobita, H.; Ji, L.; Kelly, G.; Yamaguchi, M. Toward the Standardization of the Car-roof PV—The challenge to the 3D Sunshine Modeling and Rating of the 3D Continuously Curved PV Panel. In Proceedings of the IEEE 7th World Conference on Photovoltaic Energy Conversion (WCPEC) (A Joint Conference of 45th IEEE PVSC, 28th PVSEC & 34th EU PVSEC), Waikoloa Village, HI, USA, 10–15 June 2018; pp. 368–373. [Google Scholar] [CrossRef]
- Araki, K.; Algora, C.; Siefer, G.; Nishioka, K.; Leutz, R.; Carter, S.; Wang, S.; Askins, S.; Ji, L.; Kelly, G. Standardization of the CPV and car roof PV technology in 2018—Where are we going to go? AIP Conf. Proc. 2018, 2012, 070001. [Google Scholar]
- Araki, K.; Algora, C.; Siefer, G.; NIshioka, K.; Muller, M.; Leutz, R.; Carter, S.; Wang, S.; Askins, S.; Ji, L.; et al. Toward Standardization of Solar trackers, concentrator PV, and car-ROOF pv. Grand Renew. Energy Proc. Jpn. Counc. Renew. Energy 2018, 2018, 37. [Google Scholar]
- Araki, K.; Algora, C.; Siefer, G.; Nishioka, K.; Leutz, R.; Carter, S.; Wang, S.; Askins, S.; Ji, L.; Kelly, G. Standardization of the CPV technology in 2019—The path to new CPV technologies. In AIP Conference Proceedings; AIP Publishing: Melville, NY, USA, 2019; Volume 2149, p. 090001. [Google Scholar]
- Ota, Y.; Masuda, T.; Araki, K.; Yamaguchi, M. Curve-Correction Factor for Characterization of the Output of a Three-Dimensional Curved Photovoltaic Module on a Car Roof. Coatings 2018, 8, 432. [Google Scholar] [CrossRef] [Green Version]
- Schuss, C.; Kotikumpu, T.; Eichberger, B.; Rahkonen, T. Impact of dynamic environmental conditions on the output behaviour of photovoltaics. In Proceedings of the 20th IMEKO TC-4 International Symposium, Benevento, Italy, 15–17 September 2014; pp. 993–998. [Google Scholar]
- Schuss, C.; Gall, H.; Eberhart, K.; Illko, H.; Eichberger, B. Alignment and interconnection of photovoltaics on electric and hybrid electric vehicles. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC) Proceedings, Montevideo, Uruguay, 12–15 May 2014; pp. 153–158. [Google Scholar]
- Schuss, C.; Eichberger, B.; Rahkonen, T. Impact of sampling interval on the accuracy of estimating the amount of solar energy. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference Proceedings, Taipei, Taiwan, 23–26 May 2016; pp. 1–6. [Google Scholar]
- Araki, K.; Lee, K.-H.; Masuda, T.; Hayakawa, Y.; Yamada, N.; Ota, Y.; Yamaguchi, M. Rough and Straightforward Estimation of the Mismatching Loss by Partial Shading of the PV Modules Installed on an Urban Area or Car-Roof. In Proceedings of the 46th IEEE PVSC, Chicago, IL, USA, 16–21 June 2019. [Google Scholar]
- Tayagaki, T.; Araki, K.; Yamaguchi, M.; Sugaya, T. Impact of Nonplanar Panels on Photovoltaic Power Generation in the Case of Vehicles. IEEE J. Photovolt. 2019, 9, 1721–1726. [Google Scholar] [CrossRef]
- Araki, K.; Ota, Y.; Lee, K.-H.Y.; Yamada, N.; Yamaguchi, M. Curve Correction of the Energy Yield by Flexible Photovoltaics for VIPV and BIPV Applications Using a Simple Correction Factor. In Proceedings of the 46th IEEE PVSC, Chicago, IL, USA, 16–21 June 2019. [Google Scholar]
- Ota, Y.; Masuda, T.; Araki, K.; Yamaguchi, M. A mobile multipyranometer array for the assessment of solar irradiance incident on a photovoltaic-powered vehicle. Sol. Energy 2019, 184, 84–90. [Google Scholar] [CrossRef]
- Araki, K.; Ota, Y.; Ikeda, K.; Lee, K.H.; Nishioka, K.; Yamaguchi, M. Possibility of static low concentrator PV optimized for vehicle installation. AIP Conf. Proc. 2016, 1766, 020001. [Google Scholar]
- Ota, Y.; Nishioka, K.; Araki, K.; Ikeda, K.; Lee, K.H.; Yamaguchi, M. Optimization of static concentrator photovoltaics with aspherical lens for automobile. In Proceedings of the IEEE 43rd Photovoltaic Specialists Conference (PVSC), Portland, OR, USA, 5–10 June 2016; pp. 570–573. [Google Scholar]
- Araki, K.; Lee, K.H.; Yamaguchi, M. The possibility of the static LCPV to mechanical-stack III-V//Si module. Aip Conf. Proc. 2018, 2012, 090002. [Google Scholar]
- Sato, D.; Lee, K.H.; Araki, K.; Masuda, T.; Yamaguchi, M.; Yamada, N. Design and Evaluation of Low-concentration Static III-V/Si Partial CPV Module for Car-rooftop Application. In Proceedings of the IEEE 7th World Conference on Photovoltaic Energy Conversion (WCPEC) (A Joint Conference of 45th IEEE PVSC, 28th PVSEC & 34th EU PVSEC), Waikoloa Village, HI, USA, 10–15 June 2018; pp. 954–957. [Google Scholar]
- Sato, D.; Lee, K.H.; Araki, K.; Masuda, T.; Yamaguchi, M.; Yamada, N. Design of low-concentration static III-V/Si partial CPV module with 27.3% annual efficiency for car-roof application. Prog. Photovolt. Res. Appl. 2019, 27, 501–510. [Google Scholar] [CrossRef]
- Ekins-Daukes, N.J.; Betts, T.R.; Kemmoku, Y.; Araki, K.; Lee, H.S.; Gottschalg, R.; Yamaguchi, M. Syracuse-a multi-junction concentrator system computer model. In Proceedings of the Conference Record of the Thirty-first IEEE Photovoltaic Specialists Conference, Lake Buena Vista, FL, USA, 3–7 January 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 651–654. [Google Scholar]
- Tawa, H.; Saiki, H.; Ota, Y.; Araki, K.; Takamoto, T.; Nishioka, K. Accurate output forecasting method for various photovoltaic modules considering incident angle and spectral change owing to atmospheric parameters and cloud conditions. Appl. Sci. 2020, in press. [Google Scholar] [CrossRef] [Green Version]
- Araki, K.; Ota, Y.; Lee, K.H.; Nishioka, K.; Yamaguchi, M. Optimization of the Partially Radiative-coupling Multi-junction Solar Cells Considering Fluctuation of Atmospheric Conditions. In Proceedings of the IEEE 7th World Conference on Photovoltaic Energy Conversion (WCPEC) (A Joint Conference of 45th IEEE PVSC, 28th PVSEC & 34th EU PVSEC), Waikoloa Village, HI, USA, 10–15 June 2018; pp. 1661–1666. [Google Scholar]
- Araki, K.; Ota, Y.; Saiki, H.; Tawa, H.; Nishioka, K.; Yamaguchi, M. Super-Multi-Junction Solar Cells—Device Configuration with the Potential for More Than 50% Annual Energy Conversion Efficiency (Non-Concentration). Appl. Sci. 2019, 9, 4598. [Google Scholar] [CrossRef] [Green Version]
- Saiki, H.; Sakai, T.; Araki, K.; Ota, Y.; Lee, K.H.; Yamaguchi, M.; Nishioka, K. Verification of uncertainty in CPV’s outdoor performance. In Proceedings of the IEEE 7th World Conference on Photovoltaic Energy Conversion (WCPEC) (A Joint Conference of 45th IEEE PVSC, 28th PVSEC & 34th EU PVSEC), Waikoloa Village, HI, USA, 10–15 June 2018; pp. 949–953. [Google Scholar]
- Araki, K.; Ota, Y.; Lee, K.H.; Sakai, T.; Nishioka, K.; Yamaguchi, M. Analysis of fluctuation of atmospheric parameters and its impact on performance of CPV. AIP Conf. Proc. 2018, 2012, 080002. [Google Scholar]
- Araki, K.; Lee, K.H.; Yamaguchi, M. Impact of the atmospheric conditions to the bandgap engineering of multi-junction cells for optimization of the annual energy yield of CPV. AIP Conf. Proc. 2017, 1881, 070002. [Google Scholar]
- Araki, K.; Ota, Y.; Lee, K.H.; Nishioka, K.; Yamaguchi, M. Improvement of the Spectral Sensitivity of CPV by Enhancing Luminescence Coupling and Fine-tuning to the Bottom-bandgap Matched to Local Atmospheric Conditions. AIP Conf. Proc. 2019, 2149, 060001. [Google Scholar]
- Araki, K.; Ota, Y.; Sakai, T.; Lee, K.H.; Nishioka, K.; Yamaguchi, M. Energy yield prediction of multi-junction cells considering atmospheric parameters fluctuation using Monte Carlo methods. In Proceedings of the PVSEC-27, Otsu, Japan, 12–17 November 2017. [Google Scholar]
- Araki, K.; Ota, Y.; Sakai, T.; Lee, K.H.; Yamaguchi, M. Inherent uncertainty of energy ratings of multi-junction cells by the fluctuation of atmospheric parameters. In Proceedings of the PVSEC-27, Otsu, Japan, 12–17 November 2017. [Google Scholar]
- Ota, Y.; Ueda, K.; Takamoto, T.; Nishioka, K. Output evaluation of a world’s highest efficiency flat sub module with InGaP/GaAs/InGaAs inverted triple-junction solar cell under outdoor operation. Jpn. J. Appl. Phys. 2018, 57, 08RD08. [Google Scholar] [CrossRef]
- Itagaki, A.; Okumura, H.; Yamada, A. Preparation of meteorological data set throughout Japan for suitable design of PV systems Photovoltaic Energy Conversion. In Proceedings of the 3rd World Conference on Photovoltaic Energy Conversion, Osaka, Japan, 11–18 May 2003; Volume 2. [Google Scholar]
- Shirakawa, K.; Itagaki, A.; Utsunomiya, T. Preparation of hourly solar radiation data on inclined surface (METPV-11) throughout Japan. In Proceedings of the JSES/JWEA Joint Conference, Wakkanai, Japan, 21–22 September 2011; pp. 193–196. [Google Scholar]
- Nishimura, A.; Yasui, T.; Kitagawa, S.; Hirota, M.; Hu, E. An Energy Supply Chain from Large Scale Photovoltaic Power Generation from Asian Cities to End Users in Japan. Smart Grid Renew. Energy 2017, 8, 145. [Google Scholar] [CrossRef] [Green Version]
- Talluri, G.; Grasso, F.; Chiaramonti, D. Is Deployment of Charging Station the Barrier to Electric Vehicle Fleet Development in EU Urban Areas? An Analytical Assessment Model for Large-Scale Municipality-Level EV Charging Infrastructures. Appl. Sci. 2019, 9, 4704. [Google Scholar] [CrossRef] [Green Version]
- Ximenes Naves, A.; Tulus, V.; Garrido Vazquez, E.; Jiménez Esteller, L.; Naked Haddad, A.; Boer, D. Economic Optimization of the Energy Supply for a Logistics Center Considering Variable-Rate Energy Tariffs and Integration of Photovoltaics. Appl. Sci. 2019, 9, 4711. [Google Scholar] [CrossRef] [Green Version]
- Ebrahimzadeh, E.; Blaabjerg, F.; Lund, T.; Godsk Nielsen, J.; Carne Kjær, P. Modelling and Stability Analysis of Wind Power Plants Connected to Weak Grids. Appl. Sci. 2019, 9, 4695. [Google Scholar] [CrossRef] [Green Version]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | Distribution | Type | Range |
|---|---|---|---|
| Date (day number) 1 | Uniform distribution | Integer | 0–364 (day) |
| Time 1 | Uniform distribution | Integer | 0–23 (h) |
| Number of cells partially shaded 2 | Uniform distribution | Integer | 0 (Number of cells in the string) |
| Number of cells fully shaded 2 | Uniform distribution | Integer | 0 (Number of cells in the string) |
| Shading ratio of each partially-shaded cell 3 | Uniform distribution | Real | 0–1 |
| Car orientation 4 | Uniform distribution | Real | 0°–360° |
| Isc of each cell | Normal distribution | Real | -- |
| Voc of each cell | Normal distribution | Real | -- |
| Diode ideality 5 | Normal distribution | Real | Greater than 1 |
| Measured | Model by Rough Physical Measurement | Modeled by Parameter Fit (Average Height of Shading Objects and Reflectance of the Road) 1 | |
|---|---|---|---|
| Car roof | 0.925 | 0.929 | 0.925 |
| Car side (x-direction) | 0.395 | 0.412 | 0.395 |
| Car side (y-direction) | 0.435 | 0.435 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Araki, K.; Ota, Y.; Yamaguchi, M. Measurement and Modeling of 3D Solar Irradiance for Vehicle-Integrated Photovoltaic. Appl. Sci. 2020, 10, 872. https://doi.org/10.3390/app10030872
Araki K, Ota Y, Yamaguchi M. Measurement and Modeling of 3D Solar Irradiance for Vehicle-Integrated Photovoltaic. Applied Sciences. 2020; 10(3):872. https://doi.org/10.3390/app10030872
Chicago/Turabian StyleAraki, Kenji, Yasuyuki Ota, and Masafumi Yamaguchi. 2020. "Measurement and Modeling of 3D Solar Irradiance for Vehicle-Integrated Photovoltaic" Applied Sciences 10, no. 3: 872. https://doi.org/10.3390/app10030872
APA StyleAraki, K., Ota, Y., & Yamaguchi, M. (2020). Measurement and Modeling of 3D Solar Irradiance for Vehicle-Integrated Photovoltaic. Applied Sciences, 10(3), 872. https://doi.org/10.3390/app10030872