A State of Charge Estimation Method of Lithium-Ion Battery Based on Fused Open Circuit Voltage Curve



Abstract
:1. Introduction
2. Lithium-Ion Battery Modeling and Experimental Setup
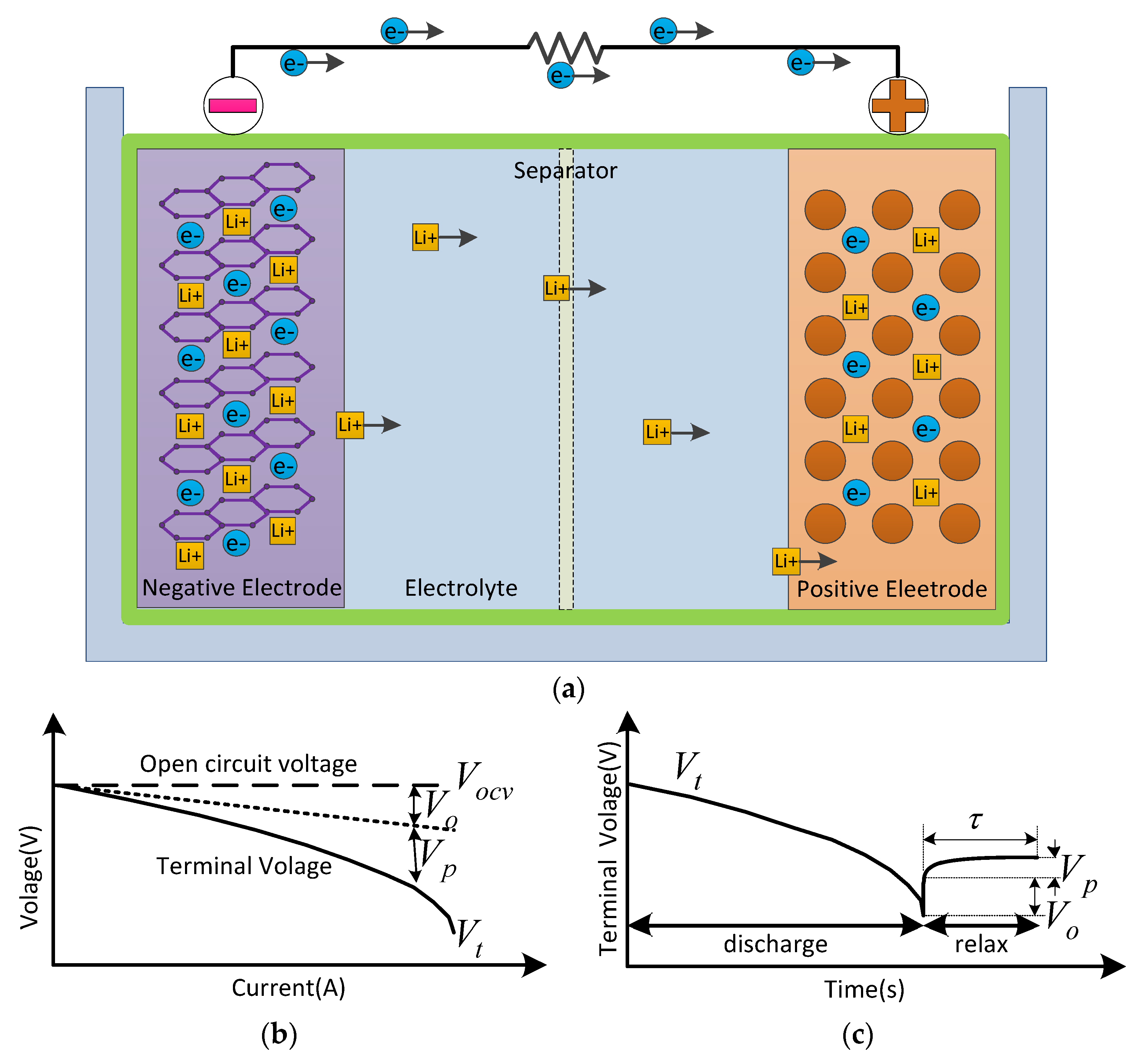
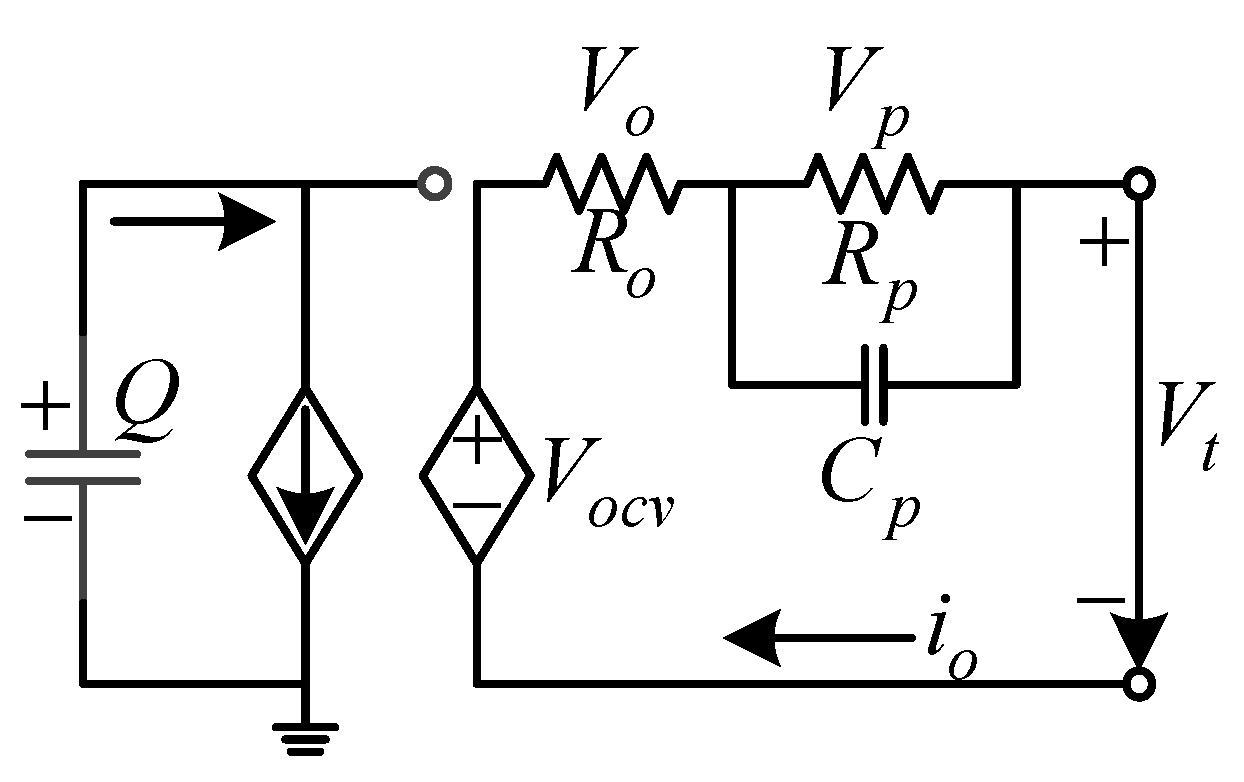
2.1. Lithium-Ion Battery Modeling
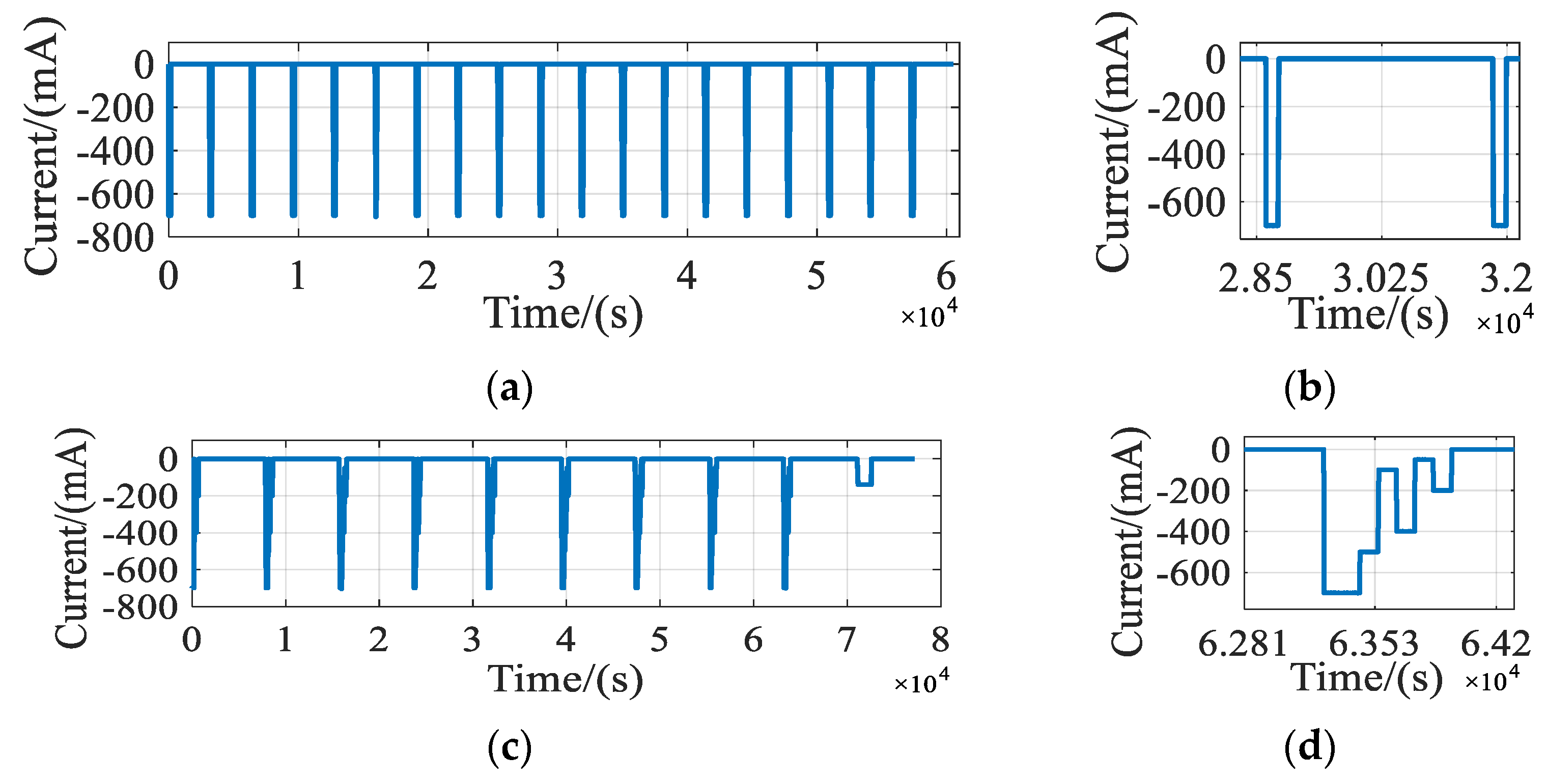
2.2. Experimental Setup
3. State of Charge (SOC) Estimation with Fused Open Circuit Voltage (OCV) Curve Based on Unscented Kalman Filter (UKF)
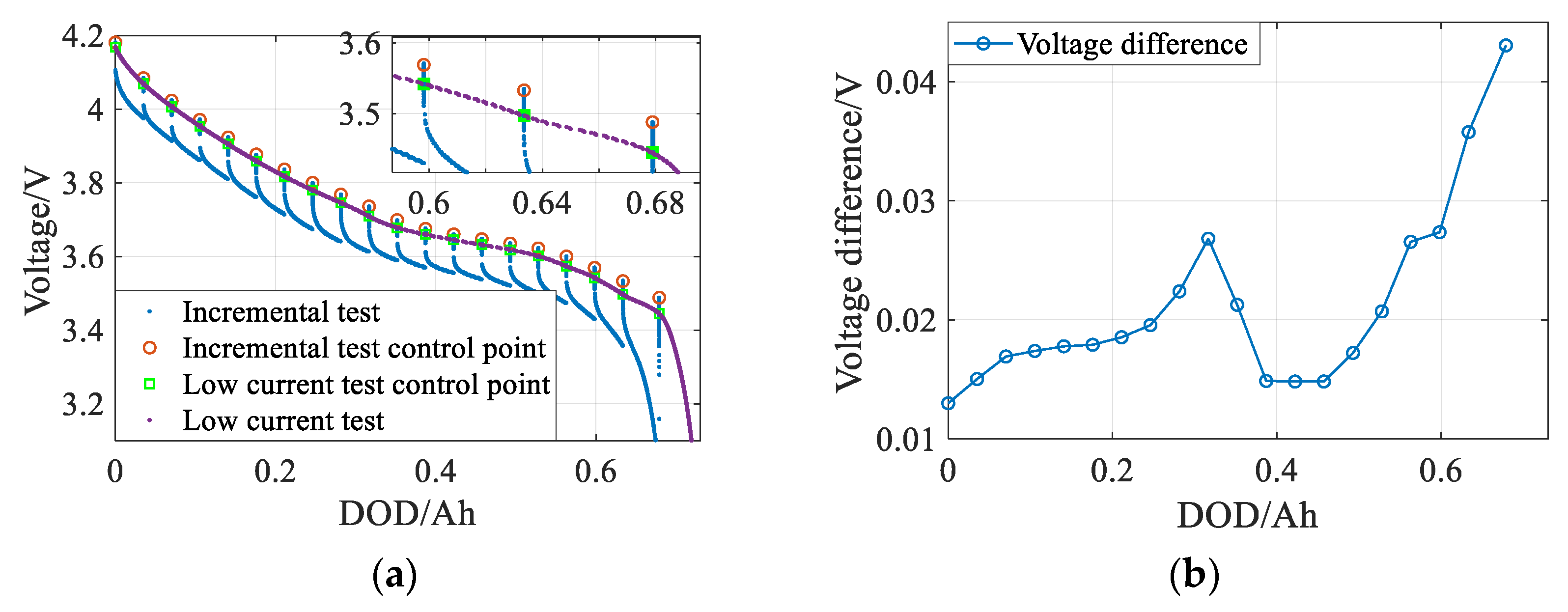
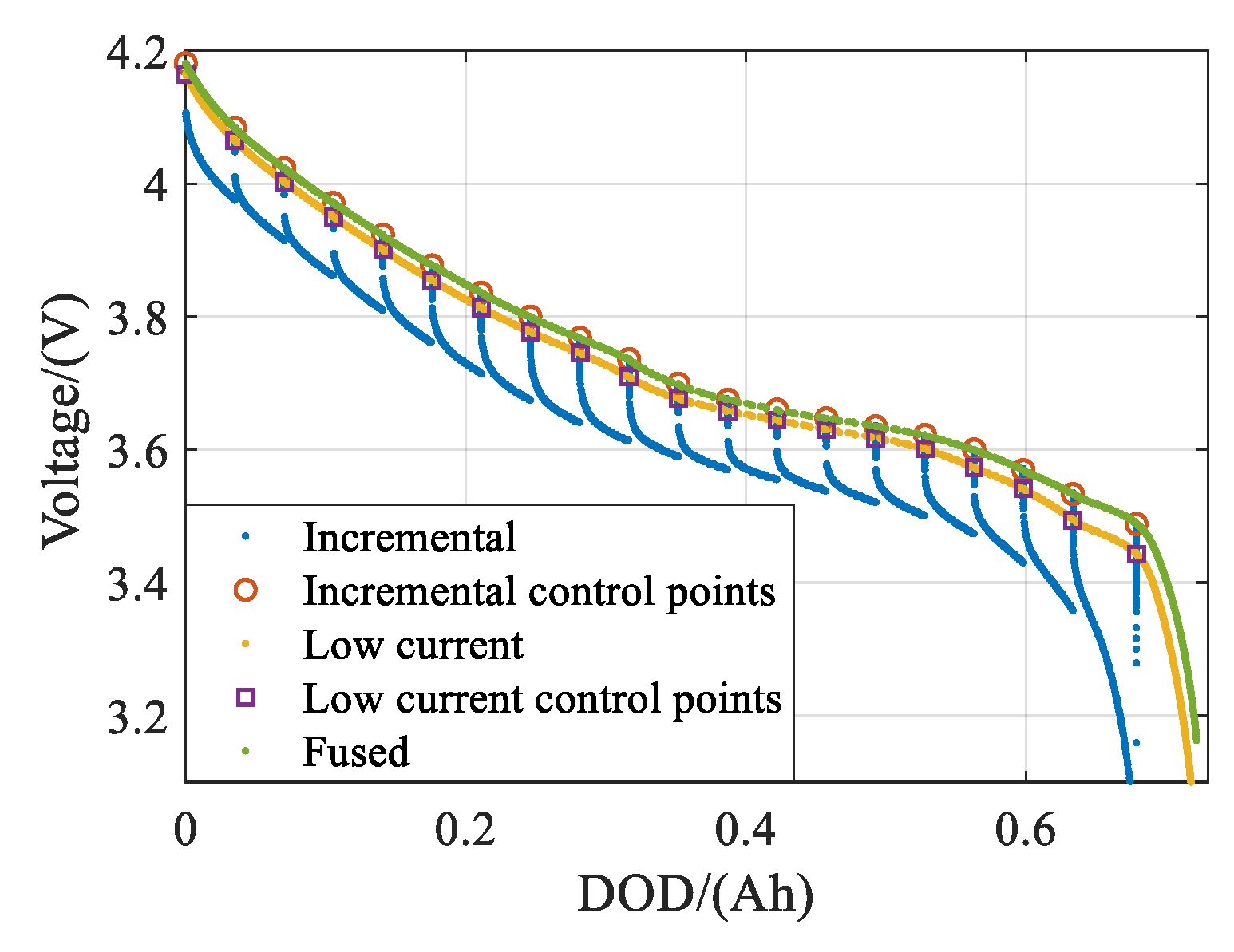
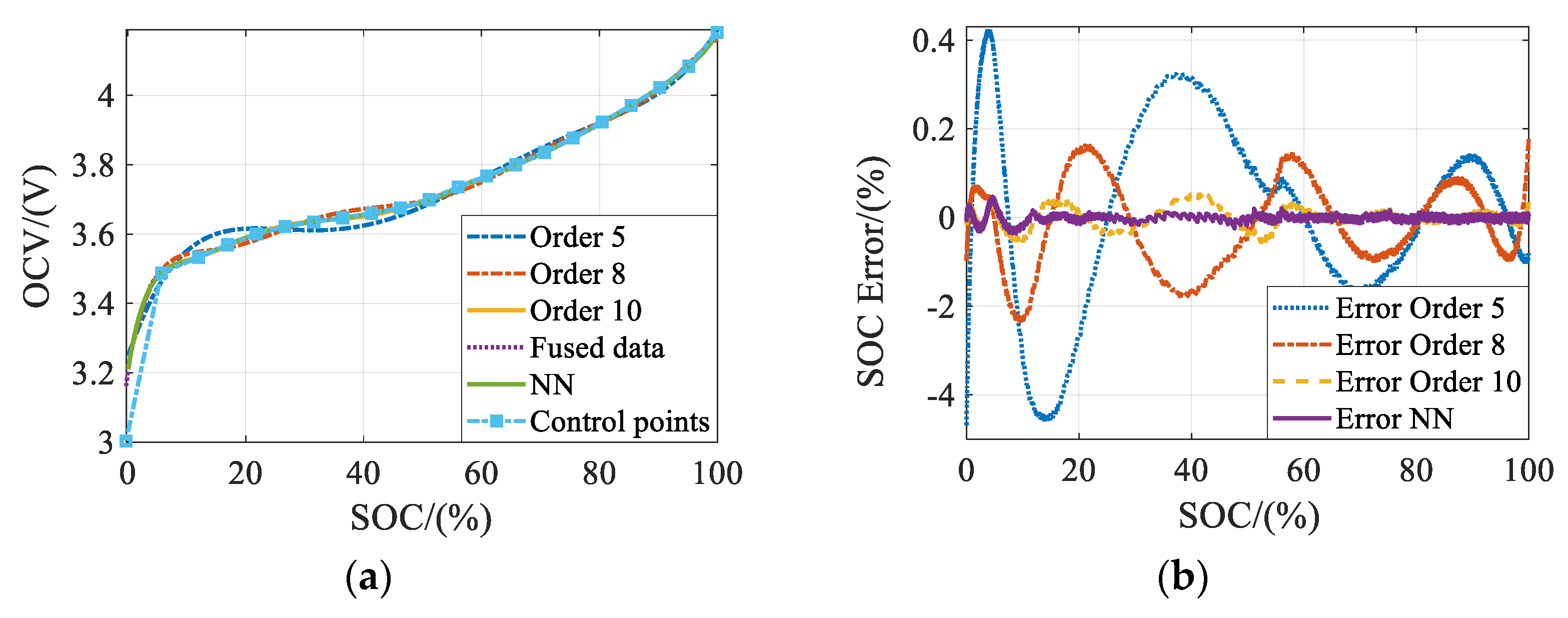
3.1. Method of Constructing Fusion OCV Curve
3.2. Co-Estimation of SOC and Model Parameters Based on UKF
| Algorithm 1 |
| 1. Initialization , For 2. Compute the simple point at time where is the number of estimation state, is the line of the matrix, and . , , . 3. Compute the value of the one-step forecasting model at time 4. Compute the one-step forecasting sample points 5. Compute and : Where 6. Computer the gain matrix 7. State estimation |
4. Experiment Validation and Discussion
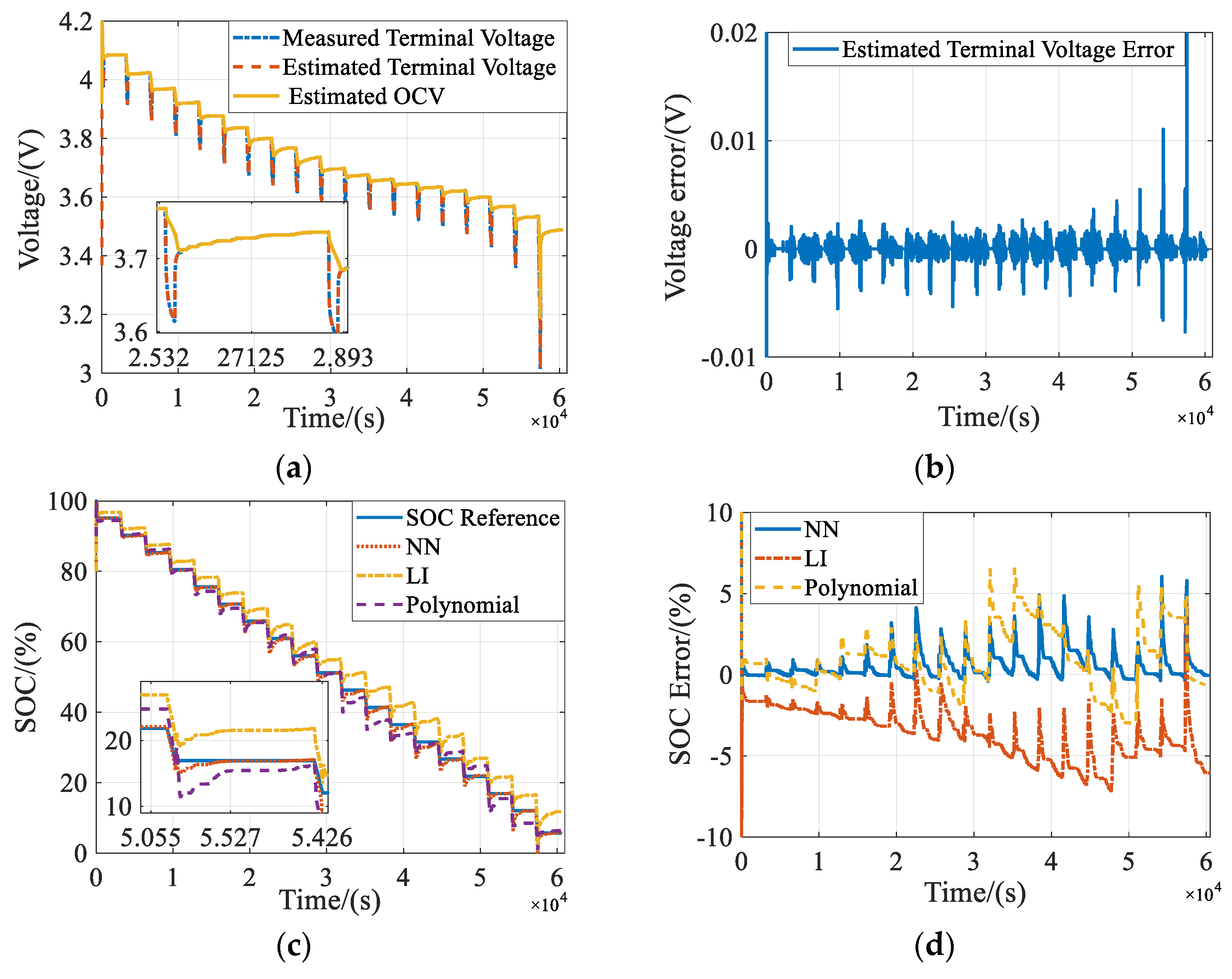
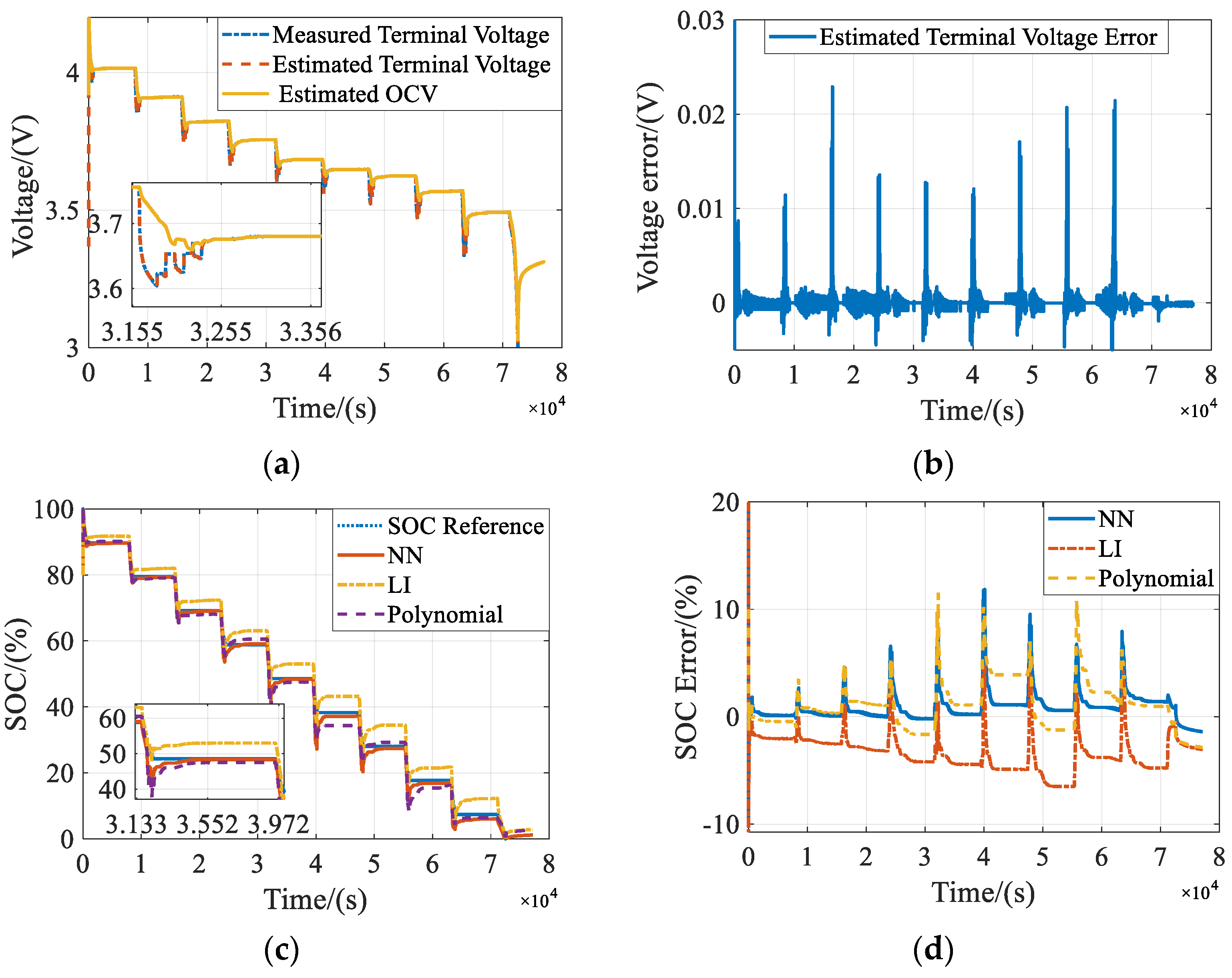
4.1. Comparison of SOC Estimation under Different OCV Curve Construction
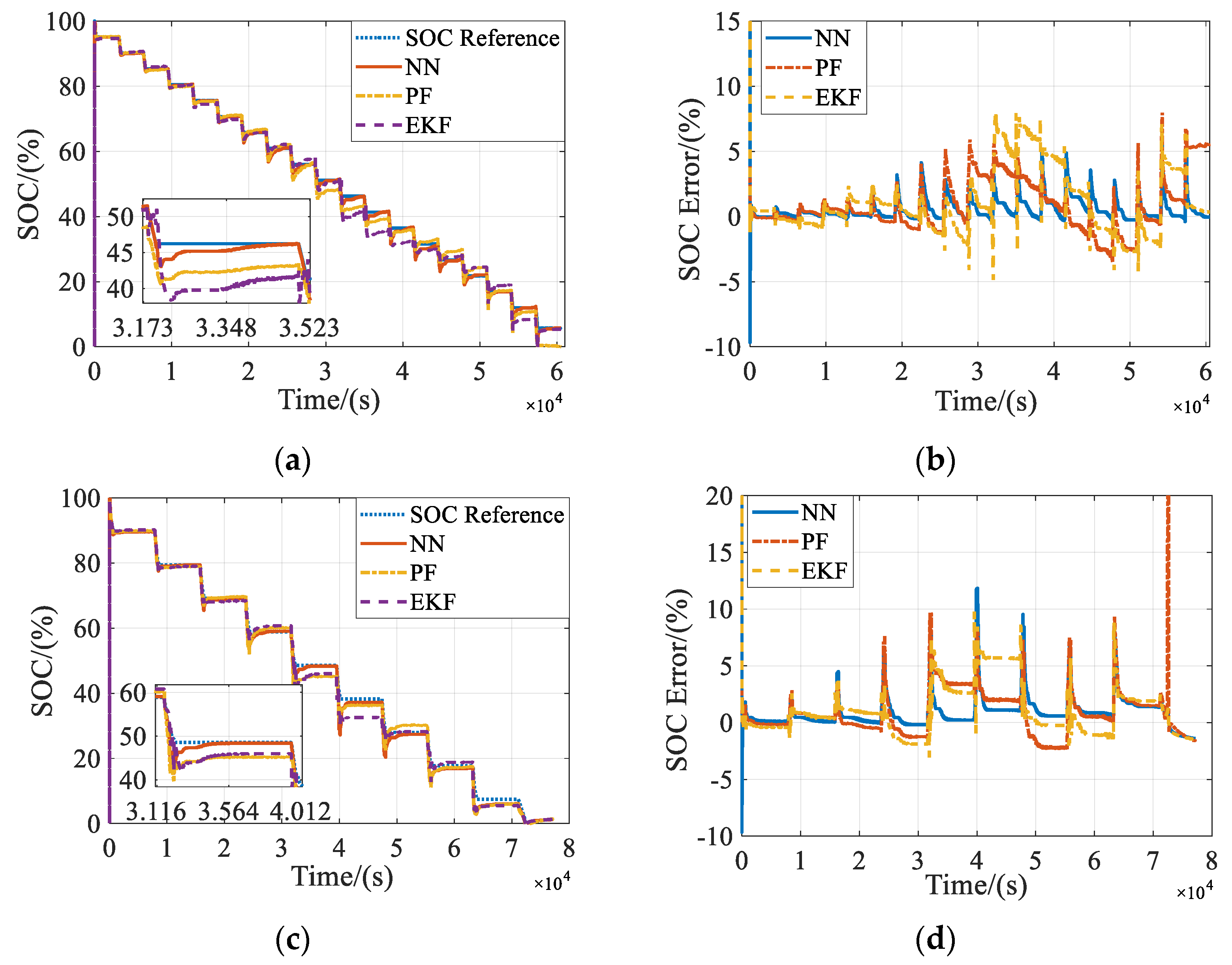
4.2. Comparison of Different SOC Estimation Methods
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Farmann, A.; Waag, W.; Marongiu, A.; Sauer, D.U. Critical review of on-board capacity estimation techniques for lithium-ion batteries in electric and hybrid electric vehicles. J. Power Sources 2015, 281, 114–130. [Google Scholar] [CrossRef]
- The Nobel Prize in Chemistry 2019 rewards the development of the lithium-ion battery. Available online: https://www.nobelprize.org/prizes/chemistry/2019/press-release/ (accessed on 11 October 2019).
- Lu, L.G.; Han, X.B.; Li, J.Q.; Hua, J.F.; Ouyang, M.G. A review on the key issues for lithium-ion battery management in electric vehicles. J. Power Sources 2013, 226, 272–288. [Google Scholar] [CrossRef]
- Yang, N.X.; Zhang, X.W.; Li, G.J. State of charge estimation for pulse discharge of a LiFePO4 battery by a revised Ah counting. Electrochim. Acta 2015, 151, 63–71. [Google Scholar] [CrossRef]
- Xing, Y.J.; He, W.; Pecht, M.; Tsui, K.L. State of charge estimation of lithium-ion batteries using the open-circuit voltage at various ambient temperatures. Appl. Energy 2014, 113, 106–115. [Google Scholar] [CrossRef]
- Wei, Z.; Zhao, J.; Zou, C.; Lim, T.M.; Tseng, K.J. Comparative study of methods for integrated model identification and state of charge estimation of lithium-ion battery. J. Power Sources 2018, 402, 189–197. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, C.; Chen, Z. A method for state-of-charge estimation of LiFePO4 batteries at dynamic currents and temperatures using particle filter. J. Power Sources 2015, 279, 306–311. [Google Scholar] [CrossRef]
- Wei, J.; Dong, G.; Chen, Z. Lyapunov-based state of charge diagnosis and health prognosis for lithium-ion batteries. J. Power Sources 2018, 397, 352–360. [Google Scholar] [CrossRef]
- Lai, X.; Zheng, Y.J.; Sun, T. A comparative study of different equivalent circuit models for estimating state-of-charge of lithium-ion batteries. Electrochim. Acta 2018, 259, 566–577. [Google Scholar] [CrossRef]
- Issac, J.; Qin, J.C.; Saeedifard, M.; Wasynczuk, O. Impact of Current Rate and Temperature on State-of-Charge Estimation of Li-ion Batteries Based on the Extended Kalman Filter. In IECON 2014—40th Annual Conference of the IEEE Industrial Electronics Society; IEEE: New York, NY, USA, 2014; pp. 3122–3128. [Google Scholar]
- Hu, J.N.; Hu, J.J.; Lin, H.B.; Li, X.P.; Jiang, C.L.; Qiu, X.H.; Li, W.S. State-of-charge estimation for battery management system using optimized support vector machine for regression. J. Power Sources 2014, 269, 682–693. [Google Scholar] [CrossRef]
- Chemali, E.; Kollmeyer, P.J.; Preindl, M.; Emadi, A. State-of-charge estimation of Li-ion batteries using deep neural networks: A machine learning approach. J. Power Sources 2018, 400, 242–255. [Google Scholar] [CrossRef]
- Tong, S.; Lacap, J.H.; Park, J.W. Battery state of charge estimation using a load-classifying neural network. J. Energy Storage 2016, 7, 236–243. [Google Scholar] [CrossRef]
- Xiong, R.; Yu, Q.Q.; Wang, L.Y.; Lin, C. A novel method to obtain the open circuit voltage for the state of charge of lithium ion batteries in electric vehicles by using H infinity filter. Appl. Energy 2017, 207, 346–353. [Google Scholar] [CrossRef]
- Petzl, M.; Danzer, M.A. Advancements in OCV measurement and analysis for lithium-ion batteries. IEEE Trans. Energy Convers. 2013, 28, 675–681. [Google Scholar] [CrossRef]
- Meng, J.H.; Ricco, M.; Acharya, A.B.; Luo, G.Z.; Swierczynski, M.; Stroe, D.I.; Teodorescu, R. Low-complexity online estimation for LiFePO4 battery state of charge in electric vehicles. J. Power Sources 2018, 395, 280–288. [Google Scholar] [CrossRef]
- Hu, C.; Youn, B.D.; Chung, J. A multiscale framework with extended Kalman filter for lithium-ion battery SOC and capacity estimation. Appl. Energy 2012, 92, 694–704. [Google Scholar] [CrossRef]
- Dong, G.; Chen, Z.; Wei, J.; Zhang, C.; Wang, P. An online model-based method for state of energy estimation of lithium-ion batteries using dual filters. J. Power Sources 2016, 301, 277–286. [Google Scholar] [CrossRef]
- Meng, J.; Stroe, D.; Ricco, M.; Luo, G.; Teodorescu, R. A Simplified Model-Based State-of-Charge Estimation Approach for Lithium-Ion Battery With Dynamic Linear Model. IEEE Trans. Ind. Electron. 2019, 66, 7717–7727. [Google Scholar] [CrossRef] [Green Version]
- Dong, G.; Wei, J.; Chen, Z.; Sun, H.; Yu, X. Remaining dischargeable time prediction for lithium-ion batteries using unscented Kalman filter. J. Power Sources 2017, 364, 316–327. [Google Scholar] [CrossRef]
- Fotouhi, A.; Auger, D.J.; Propp, K.; Longo, S. Accuracy Versus Simplicity in Online Battery Model Identification. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 195–206. [Google Scholar] [CrossRef] [Green Version]
- Nejad, S.; Gladwin, D.T.; Stone, D.A. A systematic review of lumped-parameter equivalent circuit models for real-time estimation of lithium-ion battery states. J. Power Sources 2016, 316, 183–196. [Google Scholar] [CrossRef] [Green Version]
- Ding, X.F.; Zhang, D.H.; Cheng, J.W.; Wang, B.B.; Luk, P.C.K. An improved Thevenin model of lithium-ion battery with high accuracy for electric vehicles. Appl. Energy 2019, 254, 8. [Google Scholar] [CrossRef]
- Liu, C.; Liu, W.; Wang, L.; Hu, G.; Ma, L.; Ren, B. A new method of modeling and state of charge estimation of the battery. J. Power Sources 2016, 320, 1–12. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Guo, H.; Li, S. Comparison study on the battery models used for the energy management of batteries in electric vehicles. Energy Convers. Manag. 2012, 64, 113–121. [Google Scholar] [CrossRef]
- Hu, X.; Li, S.; Peng, H. A comparative study of equivalent circuit models for Li-ion batteries. J. Power Sources 2012, 198, 359–367. [Google Scholar] [CrossRef]
- Zheng, F.D.; Xing, Y.J.; Jiang, J.C.; Sun, B.X.; Kim, J.; Pecht, M. Influence of different open circuit voltage tests on state of charge online estimation for lithium-ion batteries. Appl. Energy 2016, 183, 513–525. [Google Scholar] [CrossRef]
- Chen, Z.; Sun, H.; Dong, G.; Wei, J.; Wu, J. Particle filter-based state-of-charge estimation and remaining-dischargeable-time prediction method for lithium-ion batteries. J. Power Sources 2019, 414, 158–166. [Google Scholar] [CrossRef]
- Dong, G.; Wei, J.; Zhang, C.; Chen, Z. Online state of charge estimation and open circuit voltage hysteresis modeling of LiFePO4 battery using invariant imbedding method. Appl. Energy 2016, 162, 163–171. [Google Scholar] [CrossRef]
- Yang, H.; Sun, X.; An, Y.; Zhang, X.; Wei, T.; Ma, Y. Online parameters identification and state of charge estimation for lithium-ion capacitor based on improved Cubature Kalman filter. J. Energy Storage 2019, 24, 100810. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Specification |
|---|---|
| Nominal Capacity | 700 mAh |
| Charge Mode | CC 1/CV 2 |
| Charge Voltage | 4.2 V |
| Standard Charge Current | 140 mA |
| Fast Charge Current | 1400 mA |
| Charge Cut-off Current | 14 mA |
| Discharge End Voltage | 3.0 V |
| Standard Discharge Current | 140 mA |
| Type of Test | Evaluating Indicator | Fusion OCV Curve | Low Current Test OCV Curve | Increment Test OCV Curve |
|---|---|---|---|---|
| Pulse constant current discharge test | RMSE | 0.9918% | 3.9525% | 2.0772% |
| MAE | 0.5866% | 3.6636% | 1.5856% | |
| Dynamic current discharge test | RMSE | 1.6663% | 1.9236% | 2.3598% |
| MAE | 1.0303% | 1.2070% | 1.7902% |
| Type of Test | Evaluating Indicator | UKF 1 | PF 2 | RLS-EKF 3 |
|---|---|---|---|---|
| Pulse constant current discharge test | RMSE | 0.9918% | 2.1932% | 2.6907% |
| MAE | 0.5866% | 1.5567% | 1.8705% | |
| Dynamic current discharge test | RMSE | 1.6663% | 10.8486% | 2.4914% |
| MAE | 1.0303% | 1.8835% | 1.7650% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Zhao, L.; Cheng, J.; Zhou, J.; Wang, S. A State of Charge Estimation Method of Lithium-Ion Battery Based on Fused Open Circuit Voltage Curve. Appl. Sci. 2020, 10, 1264. https://doi.org/10.3390/app10041264
Wang Y, Zhao L, Cheng J, Zhou J, Wang S. A State of Charge Estimation Method of Lithium-Ion Battery Based on Fused Open Circuit Voltage Curve. Applied Sciences. 2020; 10(4):1264. https://doi.org/10.3390/app10041264
Chicago/Turabian StyleWang, Yipeng, Lin Zhao, Jianhua Cheng, Junfeng Zhou, and Shuo Wang. 2020. "A State of Charge Estimation Method of Lithium-Ion Battery Based on Fused Open Circuit Voltage Curve" Applied Sciences 10, no. 4: 1264. https://doi.org/10.3390/app10041264
APA StyleWang, Y., Zhao, L., Cheng, J., Zhou, J., & Wang, S. (2020). A State of Charge Estimation Method of Lithium-Ion Battery Based on Fused Open Circuit Voltage Curve. Applied Sciences, 10(4), 1264. https://doi.org/10.3390/app10041264