Approach to Risk Performance Reasoning with Hidden Markov Model for Bauxite Shipping Process Safety by Handy Carriers


Abstract
:1. Introduction
2. Literature Review
2.1. System of Maritime Transportation
2.2. Risk of Cargo Liquefaction
2.3. Risk Response for Shipping Process
2.4. Accident History of Bauxite Carriers
2.5. Risk Performance Reasoning for Bauxite Shipping Process
3. Methods
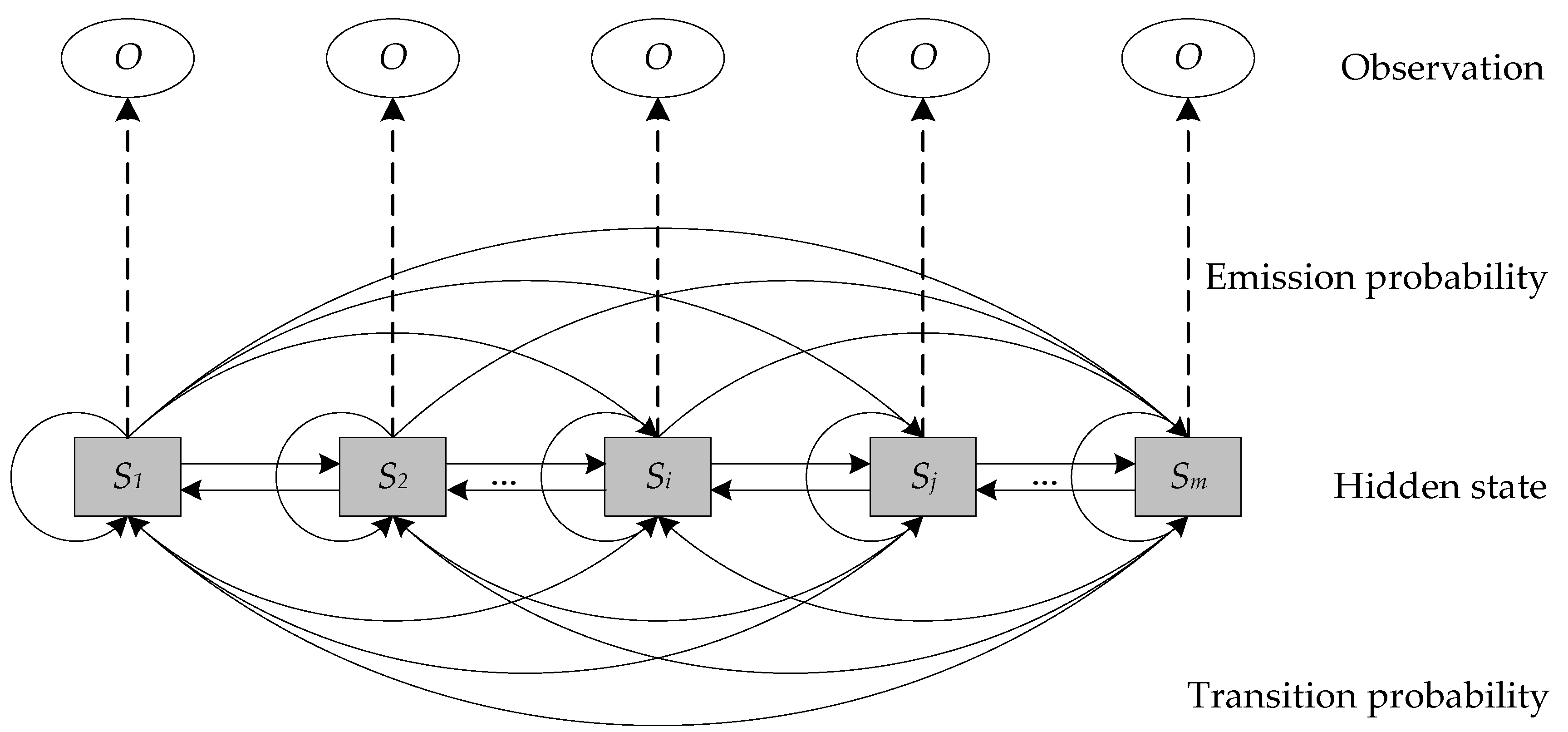
3.1. Theroy of Hidden Markov Model
3.1.1. Hidden Markov Model
3.1.2. HMM Parameter Learning
3.2. The Application of Hidden Markov Model
3.2.1. Description of Bauxite Shipping
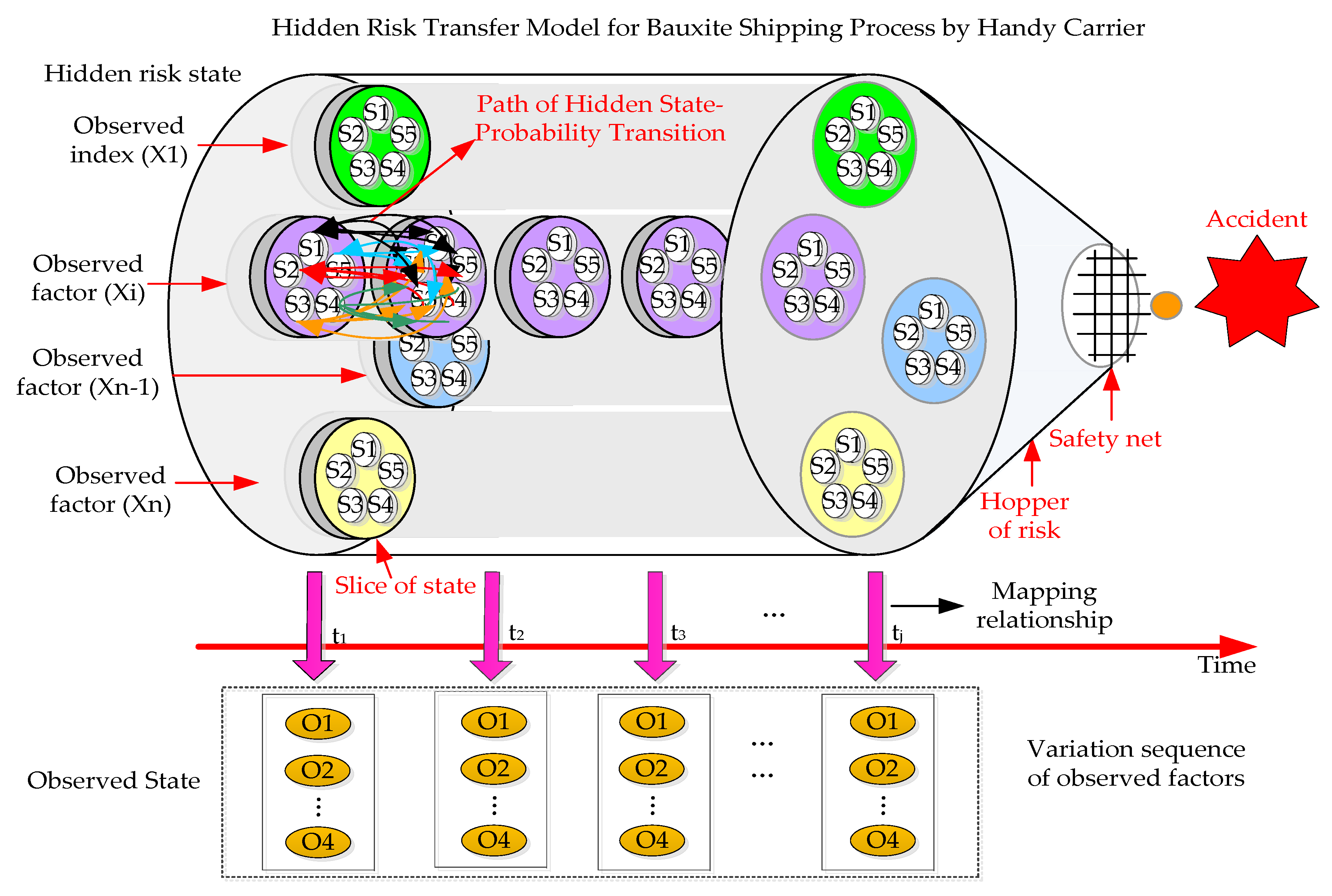
3.2.2. Risk Performance Transition of Bauxite Shipping
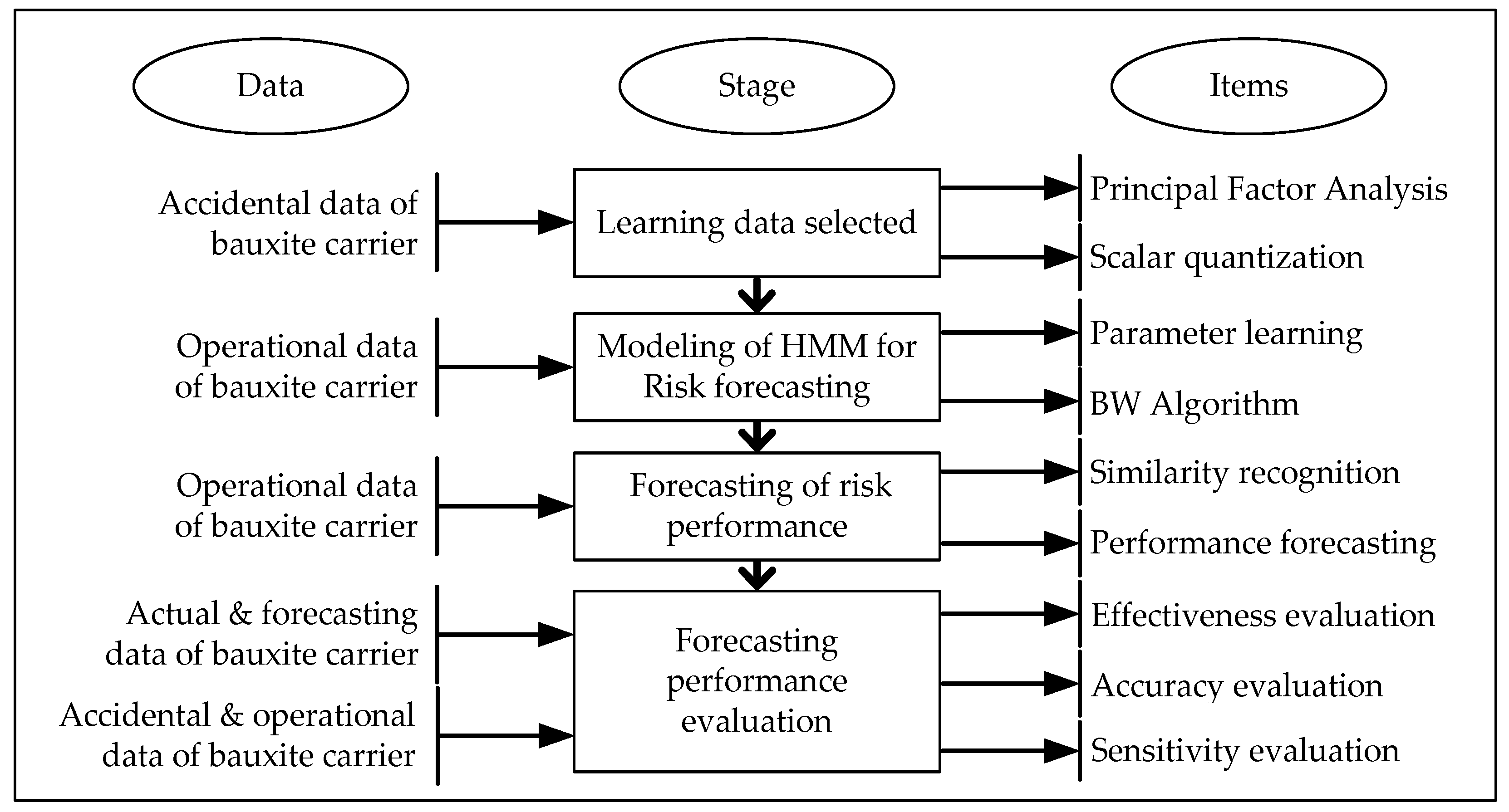
3.2.3. HMM-Based Approach to Risk Performance Reasoning
3.3. Modeling of HMM for Risk Performance Reasoning
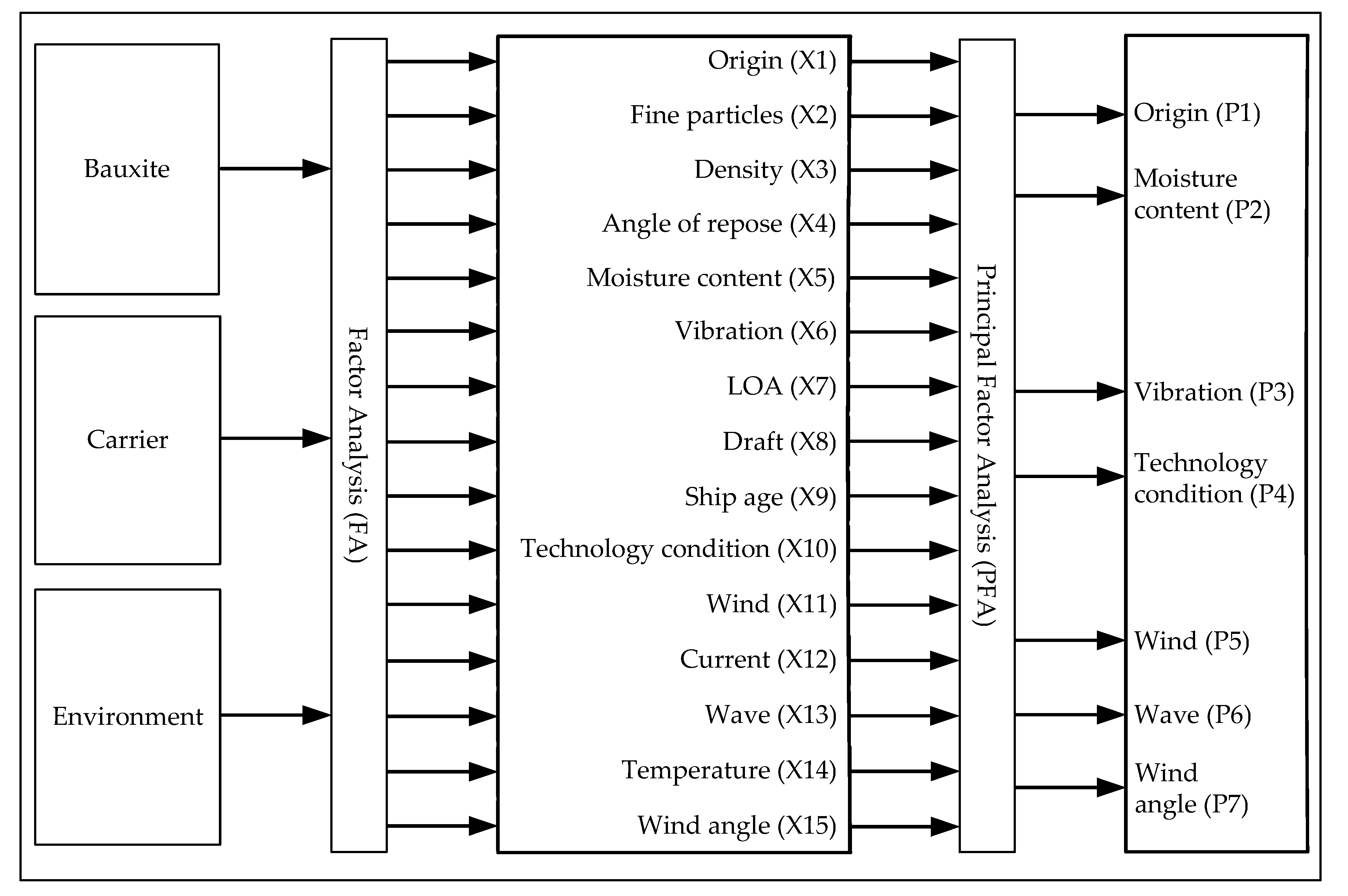
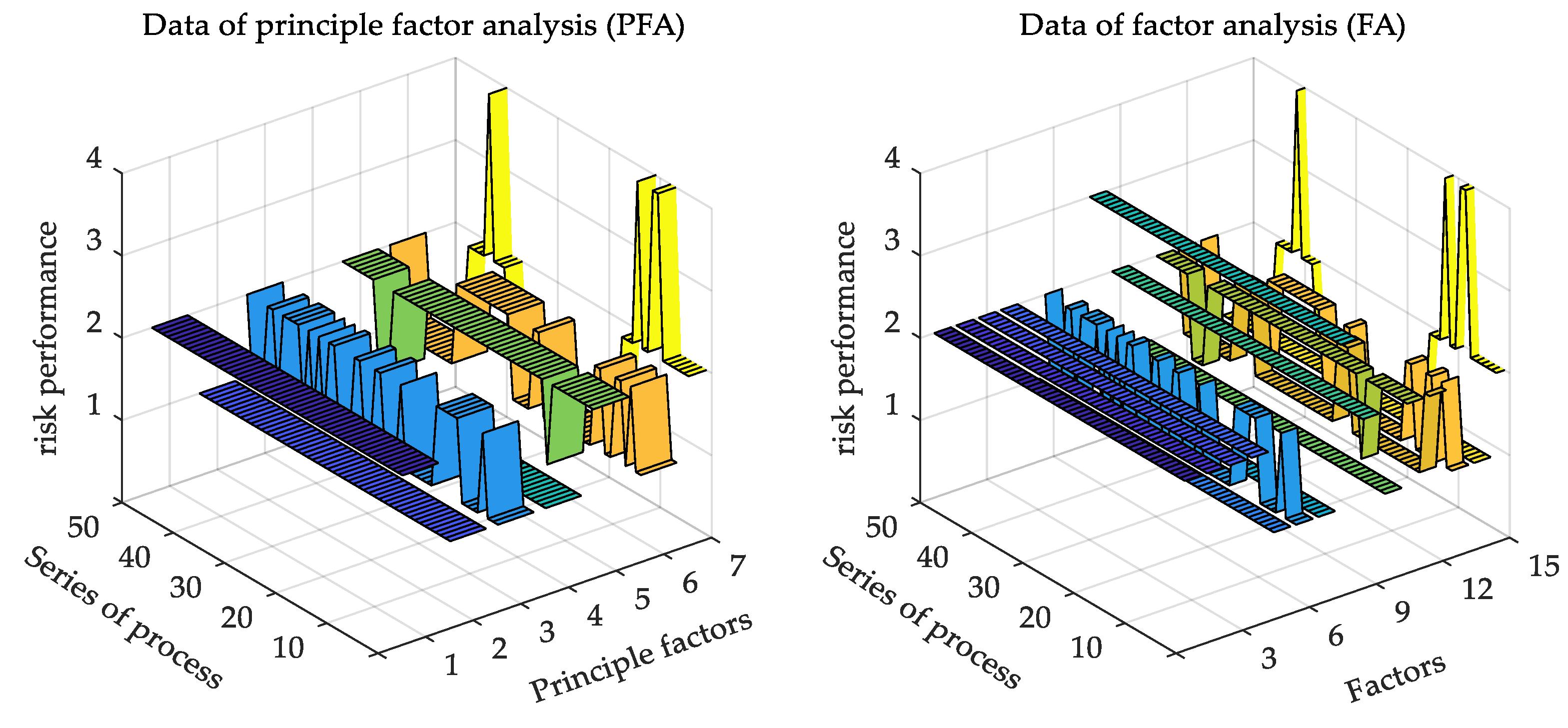
3.3.1. Principal Factor Analysis
3.3.2. Scalar Quantization
3.4. Risk Performance Reasoning
3.4.1. Similarity Recognition
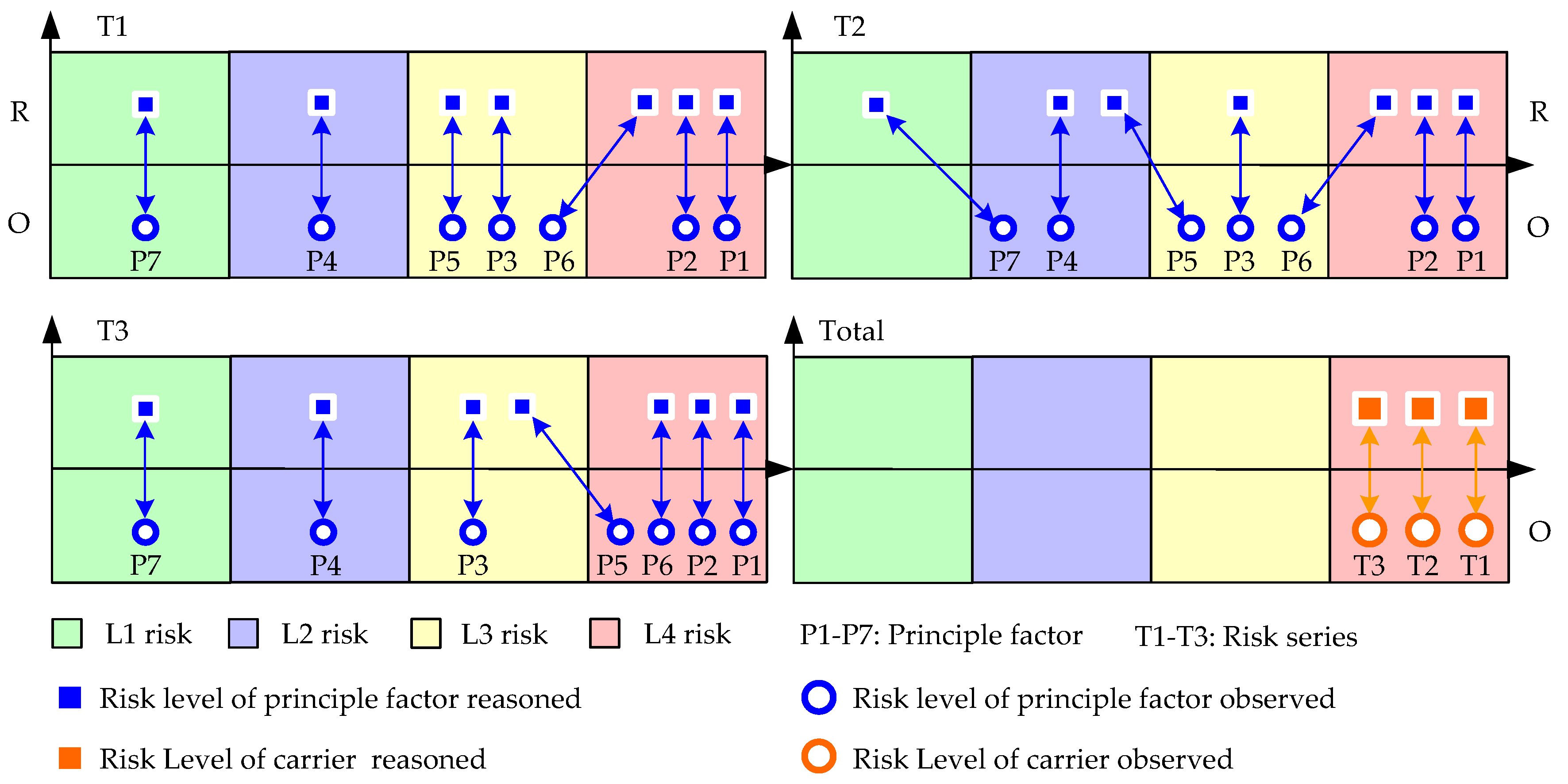
3.4.2. Risk Performance Reasoning of Factors
3.4.3. Risk Performance Reasoning of Ship
3.5. Performance Evaluation of Reasoning
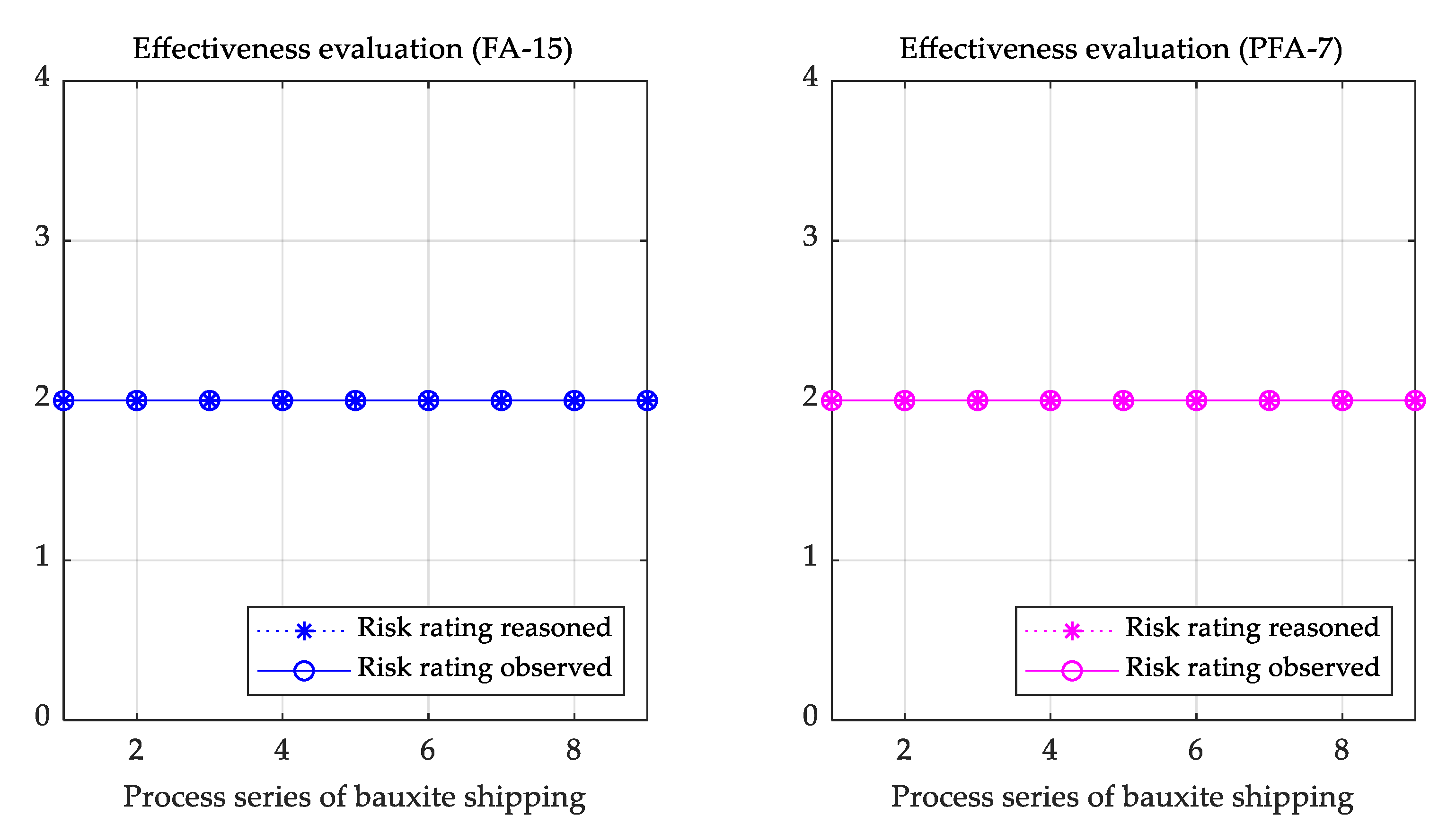
3.5.1. Effectiveness Evaluation
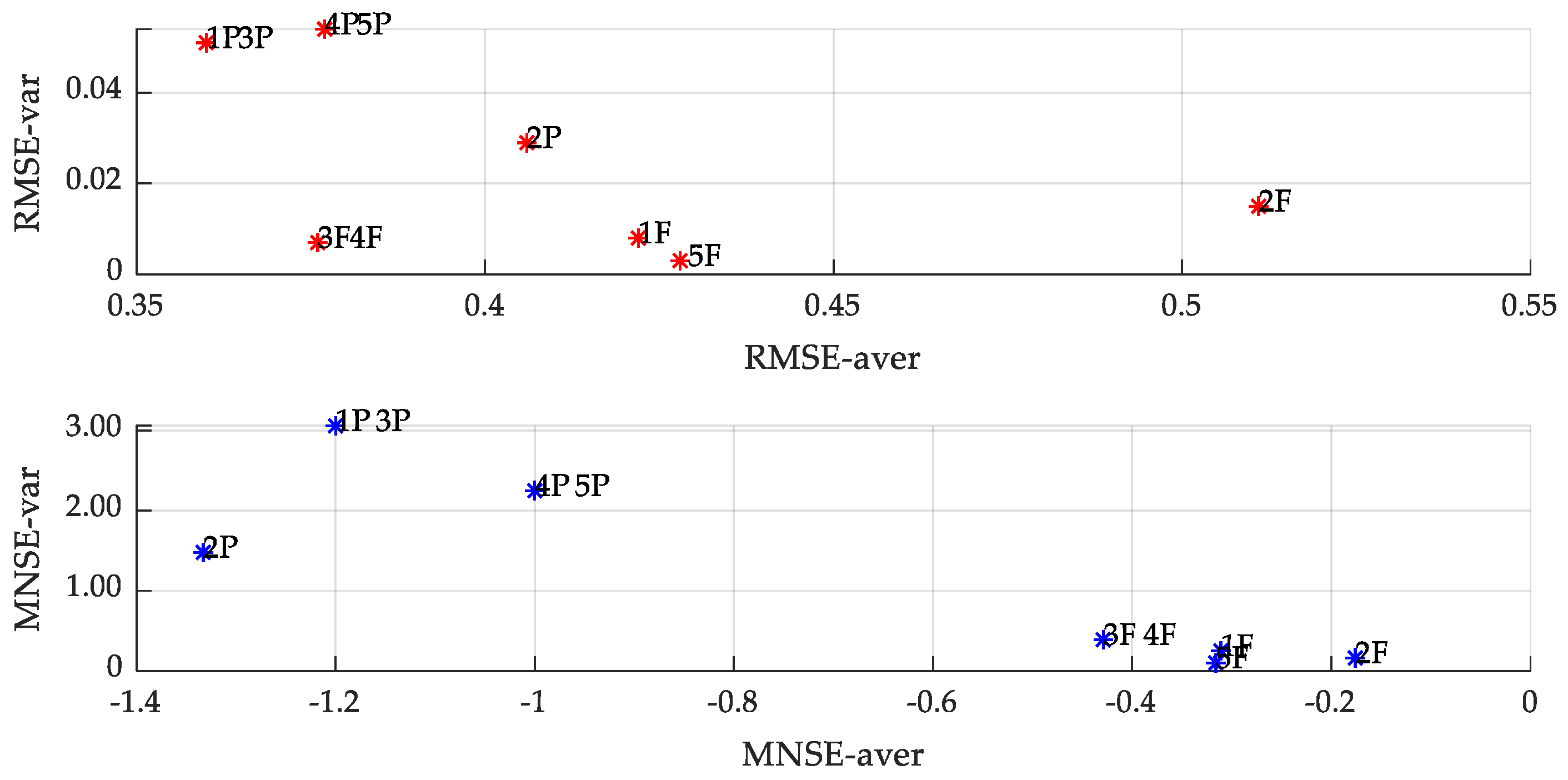
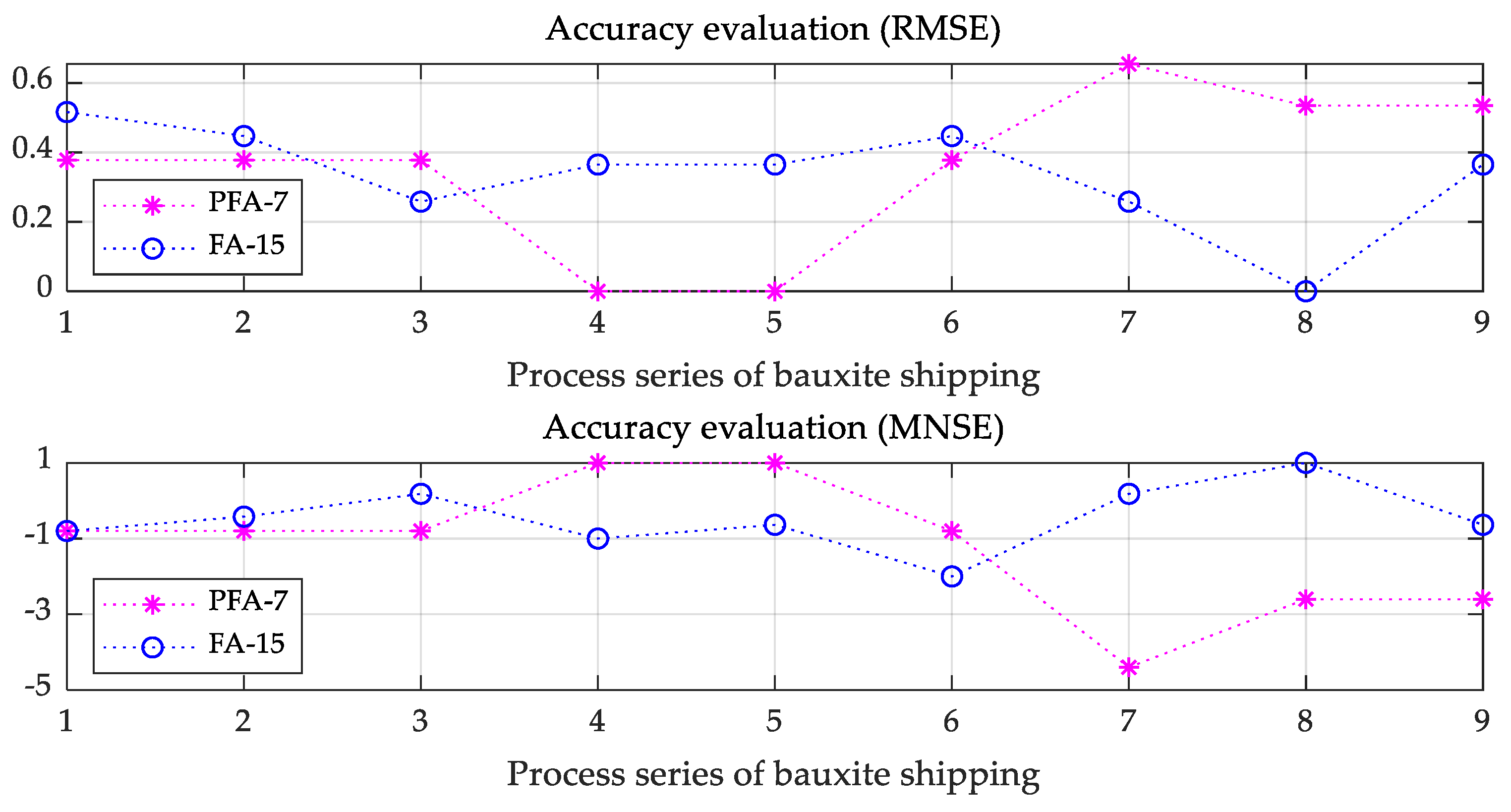
3.5.2. Accuracy Evaluation
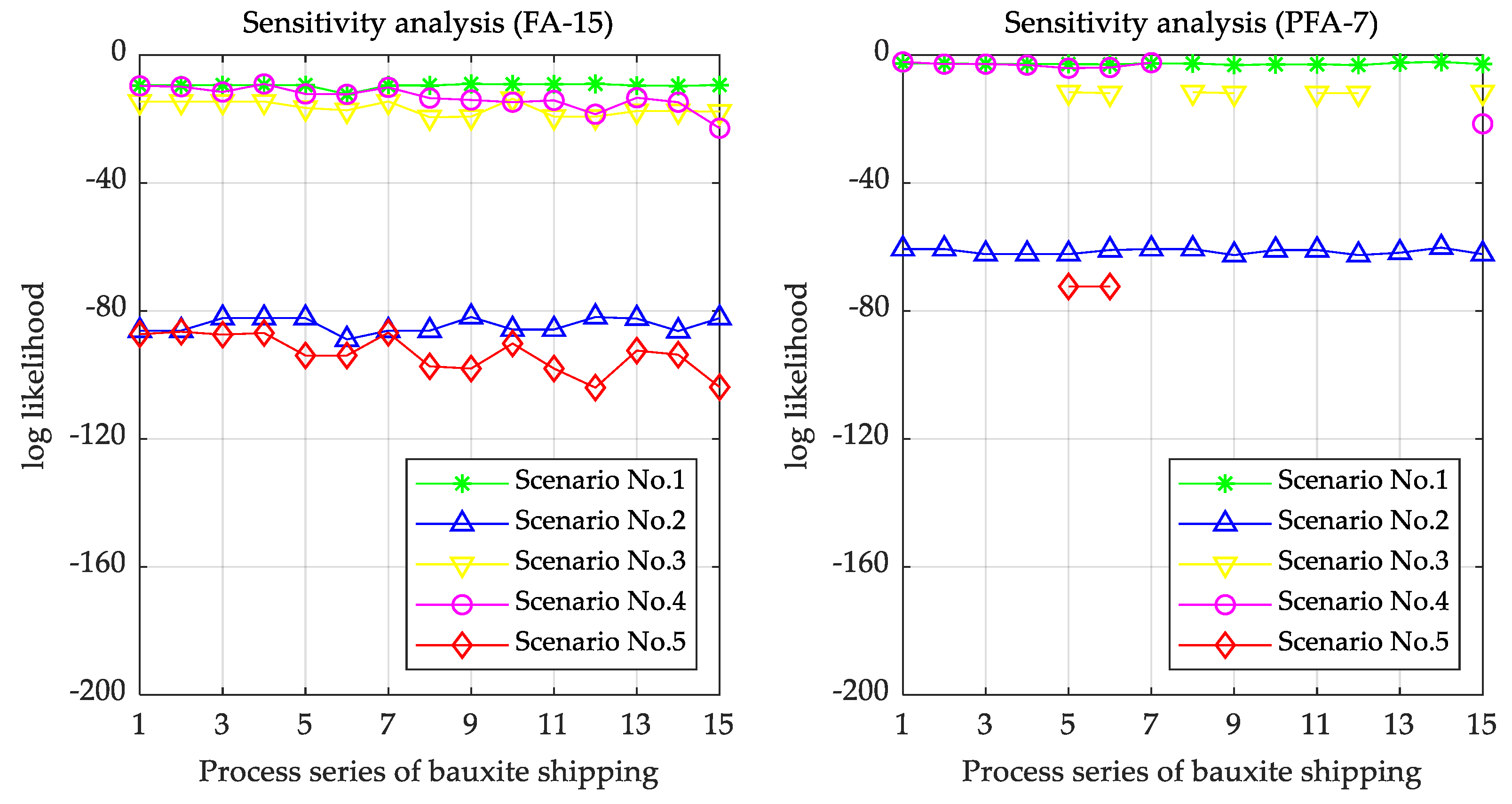
3.5.3. Sensitivity Evaluation
4. Results
4.1. Data of Handy Bauxite Carrier
4.1.1. Ship Parameters
4.1.2. Operational Case
4.1.3. Accident Case
4.1.4. Data Collection
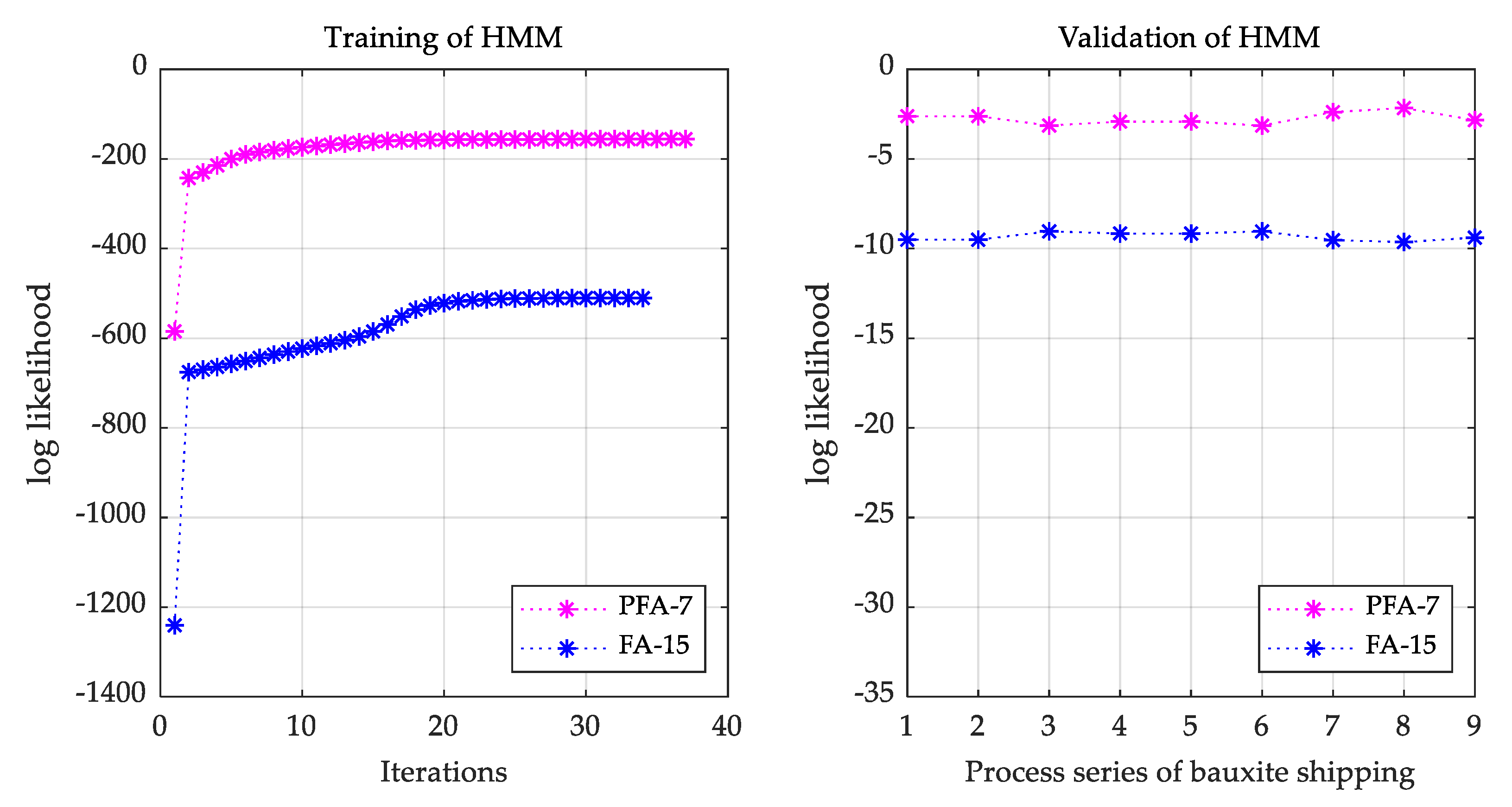
4.2. Parameter Training
4.3. Selection of Approach to Reasoning
4.4. Result of Reasoning
4.5. Effectiveness and Accuracy
5. Analysis and Discussion
5.1. Sensitivity Analysis
5.2. Pre-Warning of Threat
5.3. Risk Performance Reasoning with Hidden Markov Model
- The influencing factors of the reasoning performance were obtained through the demonstration, thereby providing a reference for optimizing the model parameters and the reasoning approach. According to the results and analysis of the risk performance reasoning, increasing the training data and identifying principal factors can improve the reasoning performance.
- Due to the great influence of cargo performance on the total risk performance of Handy bauxite carriers, high-risk cargo factors should be avoided. In particular, when the size of a bauxite carrier and the shipping environment or ship routing cannot be changed, the cargo quality related to shipping safety must be closely monitored, and a moisture content audit must be performed before loading, while rainproof measures should be ensured during loading and navigating.
- Compared with the effect of any single factor, the effect of the cargo, ship, and environment is more significant, leading to a transition of the total risk performance of Handy bauxite carriers. The process between subsystems is an important part of the shipping process risk control of Handy bauxite carriers. In order to ensure safety of shipping, it is essential to respond to risks timely and effectively based on accurate multi-source risk data, such as ship maneuvering, environmental information, and dynamic cargo information from the water ingress alarm system and the radar fluid-level meter fixed in the cargo hold. Therefore, it is essential to make full use of the Internet of things and artificial intelligence to develop intelligent risk monitoring sensors and forecasting equipment for shipping processes on Handy bauxite carriers.
- Based on the accurate historical data of principal factors and a more detailed classification of risk performance, short-term process risk reasoning with high-quality can be realized. Detailed shipping data of bauxite and Handy carriers include, but are not limited to, information from the logbook, which can be used in parameter learning to obtain more accurate parameters of the HMM. This will allow real-time monitoring and pre-warnings of cargo liquefaction and ship stability for the navigator onboard and ship manager ashore.
- In total, 91% of the accidents on international routes caused by the liquefaction of solid bulk cargo involve Handy carriers [47], which are usually between 80 m and 190 m in length. When a Handy carrier navigates at sea with a wavelength of 90–150 m and the speed is close to the wave speed, the ship ends up hogging and sagging, threatening the structural strength of the ship. The stability of the ship is, thus, greatly reduced.
- If possible, Handy carriers with bauxite should avoid sailing in heavy seas. In the stormy season, some special voyages of bauxite shipping could be conducted by larger bulk carriers or special ore carriers, which would have strong stability even when bauxite is liquefied. Appropriate working conditions of the main engine and ballast water can reduce the vibration intensity in the cargo hold, thereby reducing the risk of early cargo liquefaction, and obtaining earlier pre-warnings and for a better response time.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- China’s Imported Bauxite Was 82.62 Million Tons in 2018. Available online: http://www.mofcom.gov.cn/article/i/jyjl/k/201902/20190202834585.shtml (accessed on 15 February 2019).
- Global Bauxite Working Group. IMO-CCC4/INF.10. Global Bauxite Working Group Report on Research into the Bauxite during Shipping; International Maritime Organization: London, UK, 2017. [Google Scholar]
- International Association of Dry Cargo Shipowners. Bulk Carrier Casualty Report (2003, the Previous Ten Years (1994–2003) and the Trends); International Association of Dry Cargo Shipowners: London, UK, 2004. [Google Scholar]
- International Association of Dry Cargo Shipowners. Bulk Carrier Casualty Report (2005 to 2015). Available online: https://www.intercargo.org/bulk-carrier-casualty-report-2005-2015/ (accessed on 1 March 2016).
- International Association of Dry Cargo Shipowners. Bulk Carrier Casualty Report (Years 2008 to 2017 and the Trends). Available online: https://www.intercargo.org/bulk-carrier-casualty-report-2017/ (accessed on 3 May 2018).
- International Association of Dry Cargo Shipowners. Cargo Liquefaction Continues to Be a Major Risk for Dry Bulk Shipping. Media Release. 31 January 2019. Available online: https://www.intercargo.org/cargo-liquefaction-continues-to-be-a-major-risk-for-dry-bulk-shipping/ (accessed on 31 January 2019).
- Insurance Companies Appeal Shipowners to Pay Attention to Bauxite Transportation. Available online: http://www.eworldship.com/html/2015/ship_finance_0109/97262.html (accessed on 9 January 2015).
- Li, J.M.; Qi, J.; Zheng, Z.Y. Safety evolution mechanism for the maritime dangerous chemical transportation system under uncertainty conditions. J. Harbin Eng. Univ. 2014, 35, 707–712. [Google Scholar]
- Ma, X.X.; Li, W.H.; Zhang, J.; Qiao, W.L.; Zhang, Y.D.; An, J. Accident occurrence regularity analysis of shipping ore concentrate powder which may liquify and countermeasures. Navig. China 2014, 2, 43–47. [Google Scholar]
- Shen, J. Nickel Ore and its safe shipment. Adv. Mater. Res. 2012, 396–398, 2183–2187. [Google Scholar] [CrossRef]
- Wang, H.L.; Koseki, J.; Sato, T.; Chiaro, G.; Tian, J.T. Effect of saturation on liquefaction resistance of iron ore fines and two sandy soils. Soils Found. 2016, 56, 732–744. [Google Scholar] [CrossRef]
- Popek, M. Investigation of influence of organic polymer on TML value of the mineral concentrates. In Proceedings of ESREL; Kołowrocki, K., Ed.; Taylor and Francis Group: London, UK, 2005; pp. 1593–1596. [Google Scholar]
- Popek, M. The influence of organic polymer on parameters determining ability to liquefaction of mineral concentrates. Int. J. Mar. Navig. Saf. Sea Transp. 2010, 4, 435–440. [Google Scholar]
- Altun, O.; Göller, Z. The effect of filter aid reagent on CBI copper concentrate moisture. In Proceedings of the 23rd International Mining Congress and Exhibition of Turkey, Antalya, Turkey, 16–19 April 2013. [Google Scholar]
- Wu, J.J.; Liu, Y.X.; Hu, S.P.; Zhao, Y.H. Hidden Markov model for risk estimation of ship carrying liquefiable cargoes. China Saf. Sci. J. 2017, 27, 73–78. [Google Scholar]
- Munro, M.C.; Mohajerani, A. Moisture content limits of iron ore fines to prevent liquefaction during transport: Review and experimental study. Int. J. Miner. Process. 2016, 148, 137–146. [Google Scholar] [CrossRef]
- Munro, M.C.; Mohajerani, A. Liquefaction incidents of mineral cargoes on board bulk carriers. Adv. Mater. Sci. Eng. 2016, 2016, 5219474. [Google Scholar] [CrossRef] [Green Version]
- Spandonidis, C.C. Modelling and Numerical/Experimental Investigation of Granular Cargo Shift in Maritime Transportation. Ph.D. Thesis, National Technical University of Athens, Athens, Greece, 2016. [Google Scholar]
- Montewka, J.; Goerlandt, F.; Kujala, P.; Lensu, M. Towards probabilistic models for the prediction of a ship performance in dynamic ice. Cold Reg. Sci. Technol. 2015, 112, 14–28. [Google Scholar] [CrossRef]
- Wang, Y.G.; Tan, J.H. Research progress on ship stability and capsizing in random waves. J. Ship Mech. 2010, 14, 191–201. [Google Scholar]
- Ren, Y.L.; Mou, J.M.; Li, Y.J.; Yi, K. Monte Carlo simulation for the grounding probability of ship maneuvering in approach channels. J. Ship Mech. 2014, 18, 532–539. [Google Scholar]
- Zhao, Y.L.; Meng, S.X. Safety transportation of easily fluidized cargoes. J. Dalian Marit. Univ. 2012, 38, 15–18. [Google Scholar]
- Holmes, R.; Williams, K.; Honeyands, T.; Orense, R.; Roberts, A.; Pender, M.; McCallum, D.; Krull, T. Bulk commodity characterisation for transportable moisture limit determination. In Proceedings of the International Mineral Processing Congress, Québec City, QC, Canada, 11–15 September 2016. [Google Scholar]
- Ding, S. Numerical study on vibration characteristics of a cargo ship. Ship Sci. Technol. 2017, 39, 19–21. [Google Scholar]
- Munro, M.C.; Mohajerani, A. Variation of the geotechnical properties of Iron Ore Fines under cyclic loading. Ocean Eng. 2016, 126, 411–431. [Google Scholar] [CrossRef]
- Drzewieniecka, B. Safety aspect of handling and carriage of solid bulk cargoes by sea. Sci. J. Marit. Univ. Szczec. 2014, 39, 63–66. [Google Scholar]
- Ju, L.; Vassalos, D.; Boulougouris, E. Numerical assessment of cargo liquefaction potential. Ocean Eng. 2016, 120, 383–388. [Google Scholar] [CrossRef] [Green Version]
- Andrei, C.; Pazara, R.H. The impact of bulk cargoes liquefaction on ship’s intact stability. UPB Sci. Bull. 2013, 75, 12–16. [Google Scholar]
- Munro, M.C.; Mohajerani, A. Laboratory scale reproduction and analysis of the behaviour of iron ore fines under cyclic loading to investigate liquefaction during marine transportation. Mar. Struct. 2018, 59, 482–509. [Google Scholar] [CrossRef]
- Daoud, S.; Ennour, S.; Said, I.; Bouassida, M. Quasi-static numerical modelling of ore cargo during shipping. In Proceedings of the XVI European Conference on Soil Mechanics and Geotechnical Engineering, Edinburgh, Scotland, UK, 13–17 September 2015. [Google Scholar]
- Daoud, S.; Ennour, S.; Said, I.; Bouassida, M. Numerical analysis of cargo liquefaction mechanism under the swell motion. Mar. Struct. 2018, 57, 52–71. [Google Scholar]
- Liu, D.G.; Zheng, Z.Y.; Wu, Z.L. Risk analysis system of underway ships in heavy sea. J. Traffic Transp. Eng. 2004, 4, 100–102. [Google Scholar]
- IMO. CCC.1/Circ.2. Carriage of Bauxite that May Liquefy; International Maritime Organization: London, UK, 2015. [Google Scholar]
- IMO. CCC.1/Circ.2/Rev.1. Carriage of Bauxite that May Liquefy; International Maritime Organization: London, UK, 2017. [Google Scholar]
- Wu, J.; Hu, S.; Jin, Y.; Fei, J.; Fu, S. Performance simulation of the transportation process risk of bauxite carriers based on the Markov chain and cloud model. J. Mar. Sci. Eng. 2019, 7, 108. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Chung, G.; Kim, B.S.; Kim, T.W. Modified analogue forecasting in the hidden Markov framework for meteorological droughts. Sci. China Technol. Sci. 2019, 1, 151–162. [Google Scholar] [CrossRef]
- Joshi, J.C.; Kumar, T.; Srivastava, S.; Sachdeva, D. Optimisation of Hidden Markov Model using Baum–Welch algorithm for prediction of maximum and minimum temperature over Indian Himalaya. J. Earth Syst. Sci. 2017, 126, 3. [Google Scholar] [CrossRef] [Green Version]
- Fabbri, T.; Vicen-Bueno, R. Weather-Routing system based on METOC Navigation Risk assessment. J. Mar. Sci. Eng. 2019, 7, 127. [Google Scholar] [CrossRef] [Green Version]
- Wen, Z.C.; Chen, Z.G. Network security situation prediction method based on hidden Markov model. J. Cent. South Univ. Sci. Technol. 2015, 46, 3689–3695. [Google Scholar]
- Ghahramani, Z.; Jordan, M.I. Factorial hidden markov models. Mach. Learn. 1997, 29, 245–273. [Google Scholar] [CrossRef]
- Hu, S.; Li, Z.; Xi, Y.; Gu, X.; Zhang, X. Path analysis of causal factors influencing marine traffic accident via structural equation numerical modeling. J. Mar. Sci. Eng. 2019, 7, 96. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.X.; Ren, H.L. Research on the evaluation methods of formal safety assessment for ships. Syst. Eng. Electron. 2002, 10, 66–70. [Google Scholar]
- Wen, Z.C.; Chen, Z.G.; Tang, J. Prediction of network security situation on the basis of time series analysis. J. South China Univ. Technol. Nat. Sci. Ed. 2016, 5, 137–143. [Google Scholar]
- Zhang, X.N.; Lei, W.; Li, B. Bering fault detection and diagnosis method based on principal component analysis and hidden Markov model. J. Xi’an Jiaotong Univ. 2017, 6, 1–7. [Google Scholar]
- Li, Z. Passenger Ro-Ro ship type evaluation for Taiwan straits. Navig. China 2010, 33, 99–102. [Google Scholar]
- The Bahamas Maritime Authority. “M.V Bulk Jupiter”—Report of the Marine Safety Investigation into the Loss of a Bulk Carrier in the South China Sea on January 2nd 2015; Bahamas Maritime Authority: London, UK, 2015. [Google Scholar]
- Munro, M.C.; Mohajerani, A. Bulk cargo liquefaction incidents during marine transportation and possible Causes. Ocean Eng. 2017, 141, 125–142. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Observed Factor | Factor Value | Normal Risk | Low Risk | High Risk | Uncontrolled |
|---|---|---|---|---|---|
| Origin (P1) | Risk property | Better | Good | Bad | Worse |
| Moisture (P2) | Absolute value | <0.8 × TML | 0.8 × TML–TML | TML–FMP | >FMP |
| Vibration (P3) | Intensity scales | Weak | General | Strong | Violent |
| Technology (P4) | Reliability | Better | Good | Bad | Worse |
| Wind (P5) | Beaufort Scale | 1–3 | 3–6 | 7–9 | >9 |
| Wave (P6) | Wave scale | 1–2 | 3–4 | 5–6 | >7 |
| Wind angle (P7) | Intersection angle | 0–30 or 150–180 | 30–60 or 120–150 | 60–80 or 100–120 | 80–100 |
| Ship Name | LOA | Breadth | Depth | Service Speed | Total Cargo Weight |
|---|---|---|---|---|---|
| M.V. Yuming | 189.9 m | 32.36 m | 15.7 m | 14.2 kn | 42,700 t |
| M.V. Bulk Jupiter | 189.99 m | 32.26 m | 17.9 m | 14.5 kn | 46,400 t |
| Scenario | Scenario No. 2 | Scenario No. 3 | Scenario No. 4 | Scenario No. 5 |
|---|---|---|---|---|
| FA-based DOS | 88.962 | 35.789 | 3.118 | 89.567 |
| PFA-based DOS | 96.234 | 80.398 | 0.001 | 96.854 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Jin, Y.; Hu, S.; Fei, J.; Zhang, Y. Approach to Risk Performance Reasoning with Hidden Markov Model for Bauxite Shipping Process Safety by Handy Carriers. Appl. Sci. 2020, 10, 1269. https://doi.org/10.3390/app10041269
Wu J, Jin Y, Hu S, Fei J, Zhang Y. Approach to Risk Performance Reasoning with Hidden Markov Model for Bauxite Shipping Process Safety by Handy Carriers. Applied Sciences. 2020; 10(4):1269. https://doi.org/10.3390/app10041269
Chicago/Turabian StyleWu, Jianjun, Yongxing Jin, Shenping Hu, Jiangang Fei, and Yuanqiang Zhang. 2020. "Approach to Risk Performance Reasoning with Hidden Markov Model for Bauxite Shipping Process Safety by Handy Carriers" Applied Sciences 10, no. 4: 1269. https://doi.org/10.3390/app10041269
APA StyleWu, J., Jin, Y., Hu, S., Fei, J., & Zhang, Y. (2020). Approach to Risk Performance Reasoning with Hidden Markov Model for Bauxite Shipping Process Safety by Handy Carriers. Applied Sciences, 10(4), 1269. https://doi.org/10.3390/app10041269