Control Strategy Development of Driveline Vibration Reduction for Power-Split Hybrid Vehicles


Abstract
:1. Introduction
2. Two-Mode Power-Split Hybrid System Model
2.1. Two-Mode Power-split Hybrid System Transmission
2.2. Internal Combustion Engine Model
2.3. Flexible Shaft Module
3. Vibration Reduction Control Methods
3.1. Pulse Cancellation (PC)
3.2. Proportional-Integral-Derivative Control (PID)
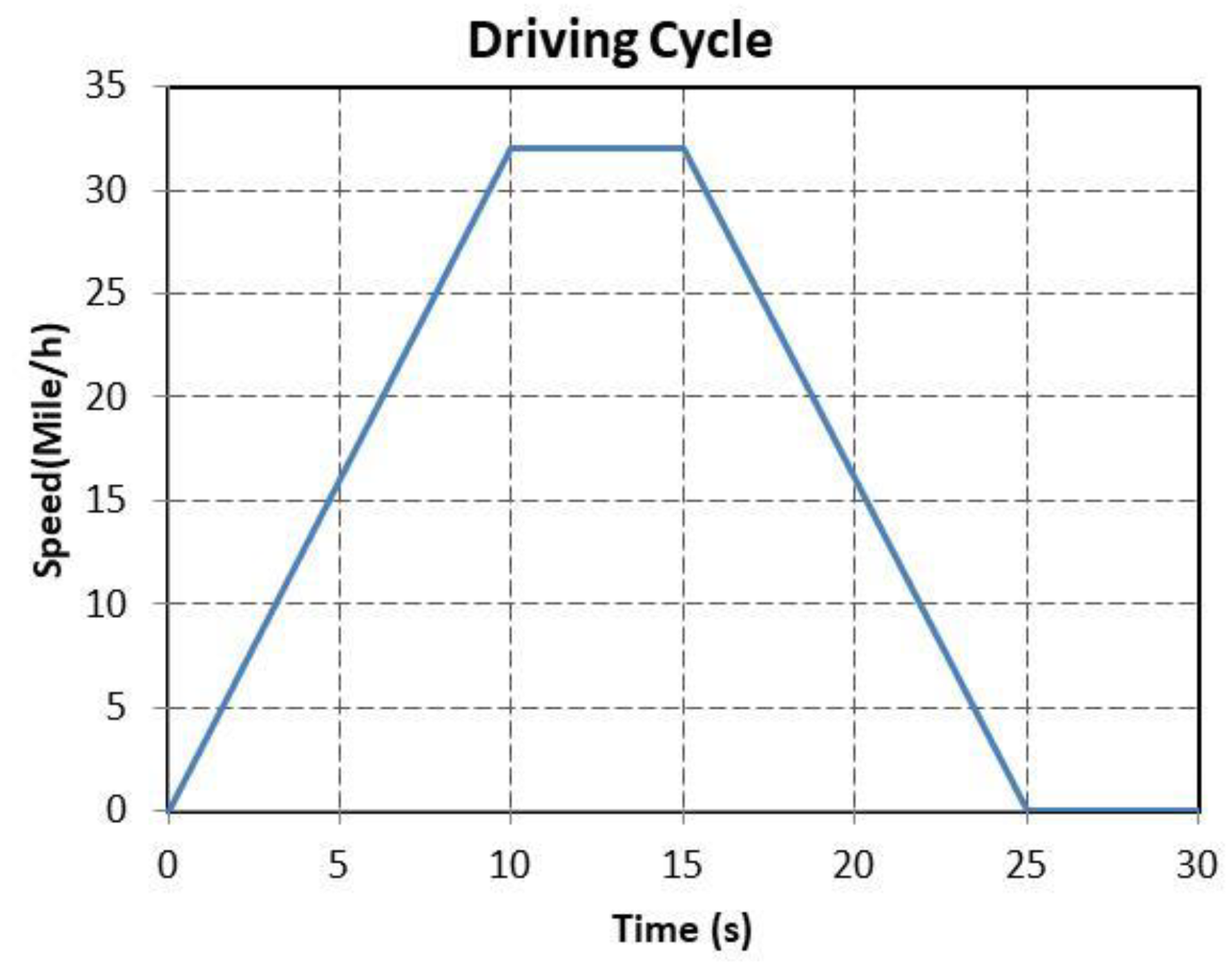
4. Simulation Results
Driving Cycle
5. Conclusions
- The vibration of the half-shaft torque feedback under each control method was observed in the time domain, the effect of PC was obvious when the vehicle accelerated and the internal combustion engine started up, the vibration reduction range of peak-to-peak value of torque was able to reach up to 22.5%. On the whole, however, the PID vibration reduction effect was more significant. The vibration reduction range of peak-to-peak value was able to reach up to 40% when the vehicle accelerated, the convergence speed was also faster, and the torque output was smoother. In addition, the effect in the time domain was not much different from the PID; therefore, the difference will be need to be determined by the frequency response.
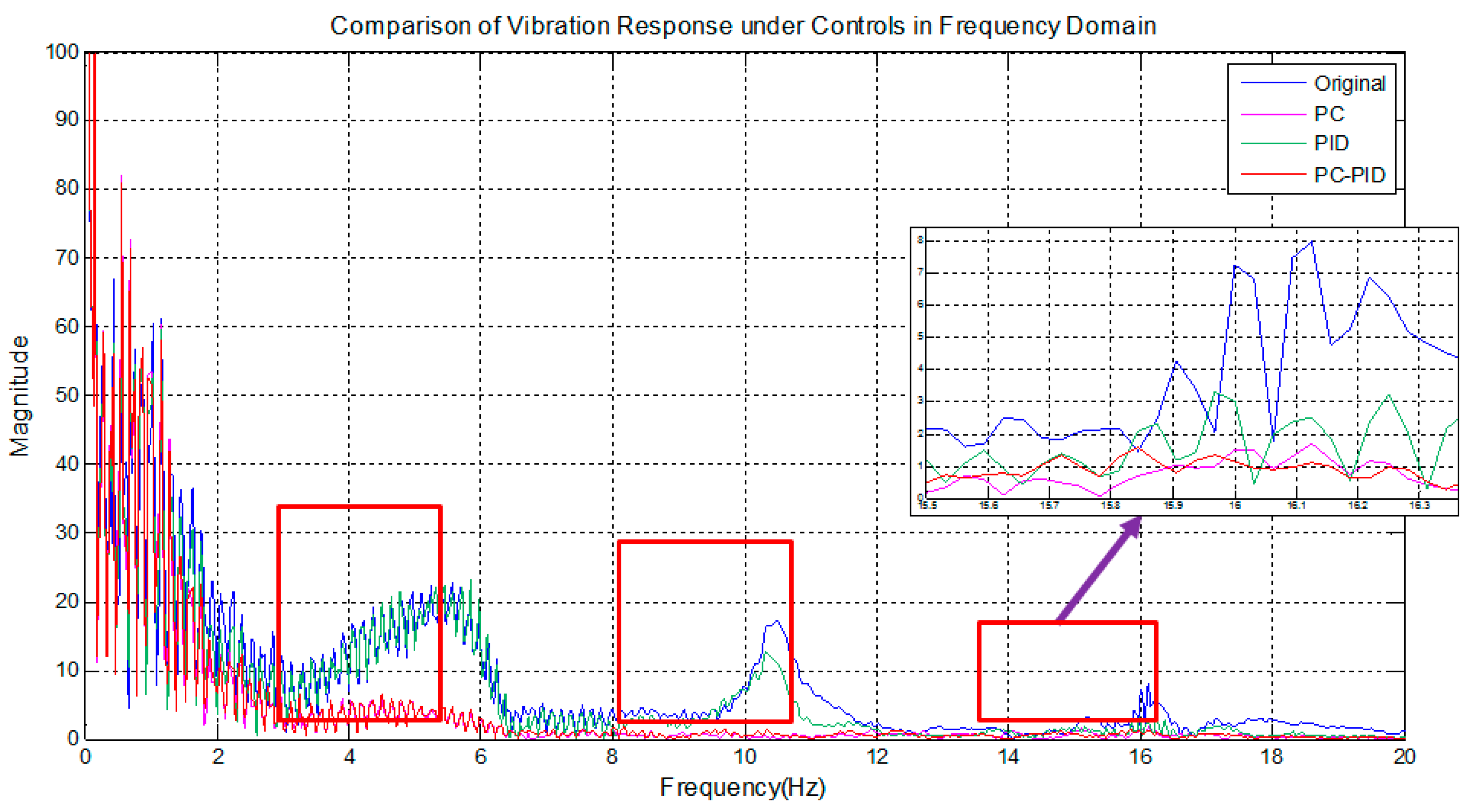
- Apart from the observation of torque in the time domain, Fast Fourier Transform analysis of half-shaft torque of the vehicle was performed. In the frequency response of half-shaft torque, it was found that although the vibration was deduced with PC, and the vibration reduction at engine damper natural frequency, 16 Hz, was able to reach up to 60%. The vibration deduction at tire natural frequency, 5 Hz, was not obvious. The vibration reduction was relatively better in the PID frequency domain response. In the original vibration, sources of 5 Hz, 11 Hz, and 16 Hz were also effectively isolated, each reduced by 78.2%, 94.7%, and 78.7%, respectively, while the effect of vibration reduction of the PC-PID at 16 Hz increased another 8%, strengthening the effect of vibration reduction for the internal combustion engine.
- The vibration reduction analysis of this research focused on the low-frequency vibration, which was directly related to the comfort of the human body. This research simulated the vibration situation when the power source was operated by estimating of the torque of the internal combustion engine derived from the cylinder pressure and adding elastomers such as a internal combustion engine damper, Half-Shaft, and tires to the driveline. There are a few more ideas for the modeling process as follows, which could be applied to improve accuracy in the future.
Author Contributions
Funding
Conflicts of Interest
References
- Doucette, R.T.; McCulloch, M.D. Modeling the Prospects of Plug-in Hybrid Electric Vehicles to Reduce CO2 Emissions. Applied Energy 2011, 88, 2315–2323. [Google Scholar] [CrossRef]
- Chau, K.T.; Wong, Y.S. Overview of Power Management in Hybrid Electric Vehicles. Energy Convers. Manag. 2002, 43, 1953–1968. [Google Scholar] [CrossRef]
- Wua, B.C.C.; Lina, Z.; Filipi, H.P.; Assanisa, D. Optimal Power Management for a Hydraulic Hybrid Delivery Truck. Veh. Syst. Dyn. 2004, 42, 23–40. [Google Scholar] [CrossRef]
- Wang, L.; Collins, E.G., Jr.; Li, H. Optimal Design and Real-Time Control for Energy Management in Electric Vehicles. IEEE Trans. Veh. Technol. 2011, 60, 1419–1429. [Google Scholar] [CrossRef]
- Canova, M.; Guezennec, Y.; Yurkovich, S. On the Control of Engine Start/Stop Dynamics in a Hybrid Electric Vehicle. J. Dyn. Sys. Meas., Control. 2009, 131, 061005. [Google Scholar] [CrossRef]
- Matijević, D.V.; Popović, V.M. Overview of Modern Contributions in Vehicle Noise and Vibration Refinement with Special Emphasis on Diagnostics. FME Trans. 2017, 45, 448–458. [Google Scholar] [CrossRef] [Green Version]
- Bayindir, K.; Ali, M.; Teke, A. A Comprehensive Overview of Hybrid Electric Vehicle: Powertrain Configurations, Powertrain Control Techniques and Electronic Control Units. Energy Convers. Manag. 2011, 52, 1305–1313. [Google Scholar] [CrossRef]
- Chang, C.C. The State of the Art of Electric, Hybrid, and Fuel Cell Vehicles. Proc. IEEE 2007, 95, 704–718. [Google Scholar] [CrossRef]
- Hendrickson, J.; Holmes, A.; Freiman, D. General Motors Front Wheel Drive Two-Mode Hybrid Transmission; 2009 SAE World Congress: Detroit, MI, USA, 2009; SAE paper number 2009-01-0508. [Google Scholar]
- Meisel, J. An Analytic Foundation for the Two-Mode Hybrid-Electric Powertrain with a Comparison to the Single-Mode Toyota Prius THS-II Powertrain; SAE World Congress: Detroit, MI, USA, 2009; SAE paper number 2009-01-1321. [Google Scholar]
- Ito, Y.; Tomura, S.; Sasaki, S. Development of Vibration Reduction Motor Control for Hybrid Vehicles. In Proceedings of the 33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007; pp. 516–521. [Google Scholar]
- Davis, R.I.; Lorenz, R.D. Engine Torque Ripple Cancellation with an Integrated Starter Alternator in a Hybrid Electric Vehicle: Implementation and Control. IEEE Trans. Ind. Appl. 2003, 30, 1765–1774. [Google Scholar] [CrossRef]
- Fesefeldt, T.; Müller, S. Optimization and Comparison of Quick and Hybrid Start; SAE World Congress: Detroit, MI, USA, 2009; SAE paper 2009-01-1340. [Google Scholar]
- Yang, Y.; Zhang, Y.; Zhang, S.; Tian, J.; Hu, S. Control Strategy of Mode Transition with Engine Start in a Plug-in Hybrid Electric Bus. Energies 2019, 14, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Wang, S.; Xia, B.; He, C.; Zhang, S.; Shi, D. Mode Transition Control for Single-Shaft Parallel Hybrid Electric Vehicle Using Model Predictive Control Approach. Adv. Mech. Eng. 2018, 10, 1–10. [Google Scholar] [CrossRef] [Green Version]
- He, R.; Tian, X.; Ni, Y.; Xu, Y. Mode Transition Coordination Control for Parallel Hybrid Electric Vehicle Based on Switched System. Adv. Mech. Eng. 2017, 9, 1–12. [Google Scholar] [CrossRef]
- Guo, R.; Chen, H.; Wang, M.J. Modeling and Active Control of Power-Split Hybrid Electric Vehicle Launch Vibration. J. Low Freq. Noise Vib. Act. Control 2019, 38, 592–607. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Zhang, J.; Cai, Y.; Zhou, Z.; Sun, X. New Method for Power Allocation of Multi-Power Sources Considering Speed-Up Transient Vibration of Planetary Power-Split HEVs Driveline System. Mechanical Syst. Signal Process. 2019, 128, 1–18. [Google Scholar] [CrossRef]
- Herbst, G. A Simulative Study on Active Disturbance Rejection Control (ADRC) as a Control Tool for Practitioners. Electronics 2013, 2, 246–279. [Google Scholar] [CrossRef]
- Liao, Y.S. Toyota Powersplit Hybrid Driveline Vibration Reduction. Master’s Thesis, Vehicle Engineering, National Taipei University of Technology, Taipei, Taiwan, 2013. [Google Scholar]
- Chen, J.S.; Hwang, H.Y. Engine Automatic Start-Stop Dynamic Analysis and Vibration Reduction for a Two-Mode Hybrid Vehicle. Proc. IMechE Part D J. Automob. Eng. 2013, 227, 1303–1312. [Google Scholar] [CrossRef]
- Vu, D.H. Fuzzy Control Strategy for GM Front Wheel Drive Two-Mode Hybrid Electric Vehicle. Master’s Thesis, National Taipei University of Technology, Taipei, Taiwan, 2013. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Peak-to-Peak Vibration (Acc. in N-m) | Peak-to-Peak Vibration (Dec. in N-m) | Vibration Reduction (Acc./Dec. in N-m) | |
|---|---|---|---|
| Basic model | 2637 | 3007 | -/- |
| PC | 2043 | 3007 | 594/419 |
| PID | 1582 | 2588 | 1055/419 |
| PC-PID | 1611 | 2588 | 1025/419 |
| PC (%) | PID (%) | PC-PID (%) | |
|---|---|---|---|
| 5 Hz | 4.3% | 78.2% | 78.2% |
| 11 Hz | 24.7% | 94.7% | 92.9% |
| 16 Hz | 60% | 78.7% | 86.2% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hwang, H.-Y.; Lan, T.-S.; Chen, J.-S. Control Strategy Development of Driveline Vibration Reduction for Power-Split Hybrid Vehicles. Appl. Sci. 2020, 10, 1712. https://doi.org/10.3390/app10051712
Hwang H-Y, Lan T-S, Chen J-S. Control Strategy Development of Driveline Vibration Reduction for Power-Split Hybrid Vehicles. Applied Sciences. 2020; 10(5):1712. https://doi.org/10.3390/app10051712
Chicago/Turabian StyleHwang, Hsiu-Ying, Tian-Syung Lan, and Jia-Shiun Chen. 2020. "Control Strategy Development of Driveline Vibration Reduction for Power-Split Hybrid Vehicles" Applied Sciences 10, no. 5: 1712. https://doi.org/10.3390/app10051712
APA StyleHwang, H. -Y., Lan, T. -S., & Chen, J. -S. (2020). Control Strategy Development of Driveline Vibration Reduction for Power-Split Hybrid Vehicles. Applied Sciences, 10(5), 1712. https://doi.org/10.3390/app10051712