An Optimized Covering Spheroids by Spheres


 and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- The concept of the -cover is introduced for the outer multi-spherical approximation of the spheroid.
- A fast two-stage approach is proposed to get a reasonable (optimized) -cover.
- Numerical results are provided to illustrate the main constructions.
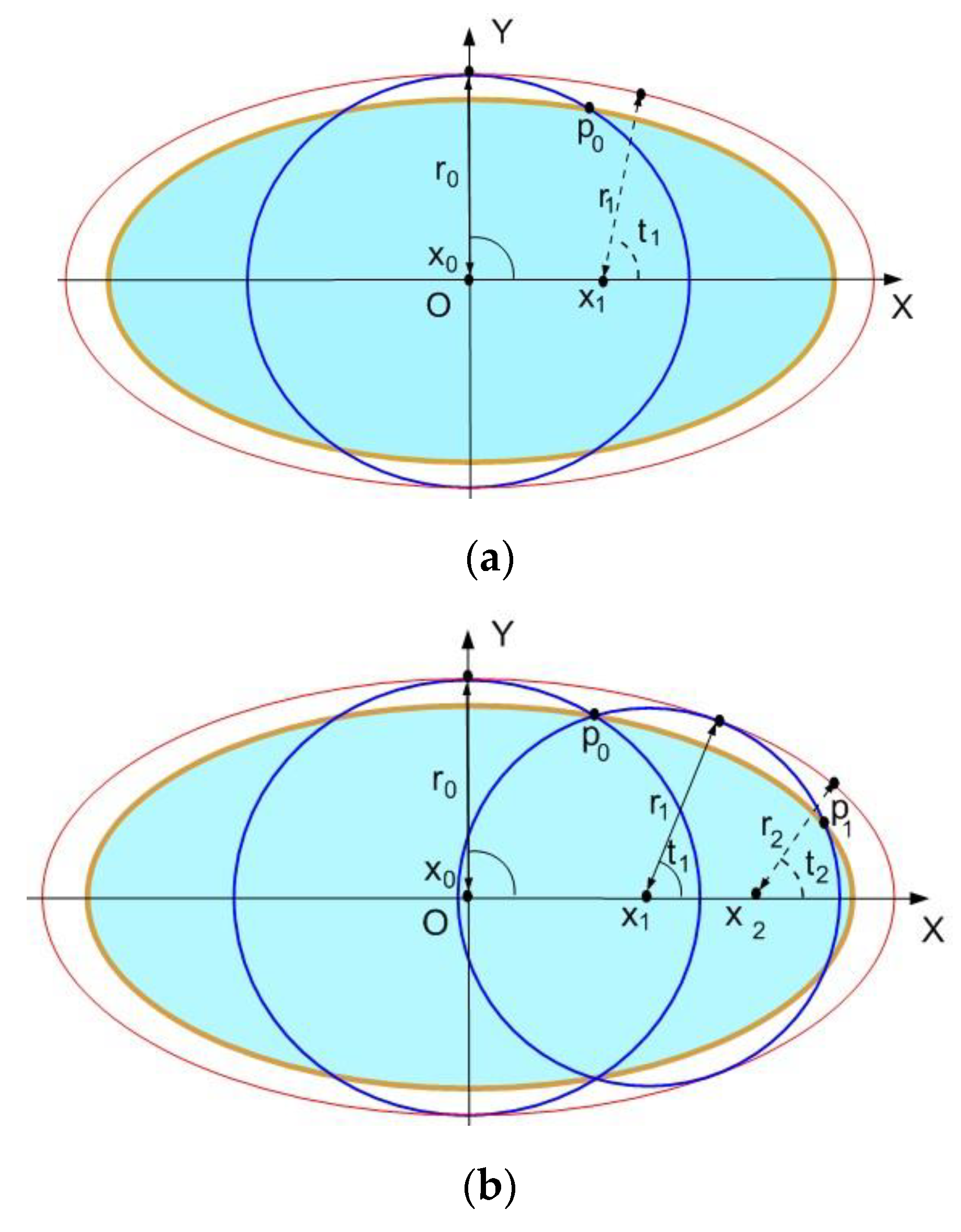
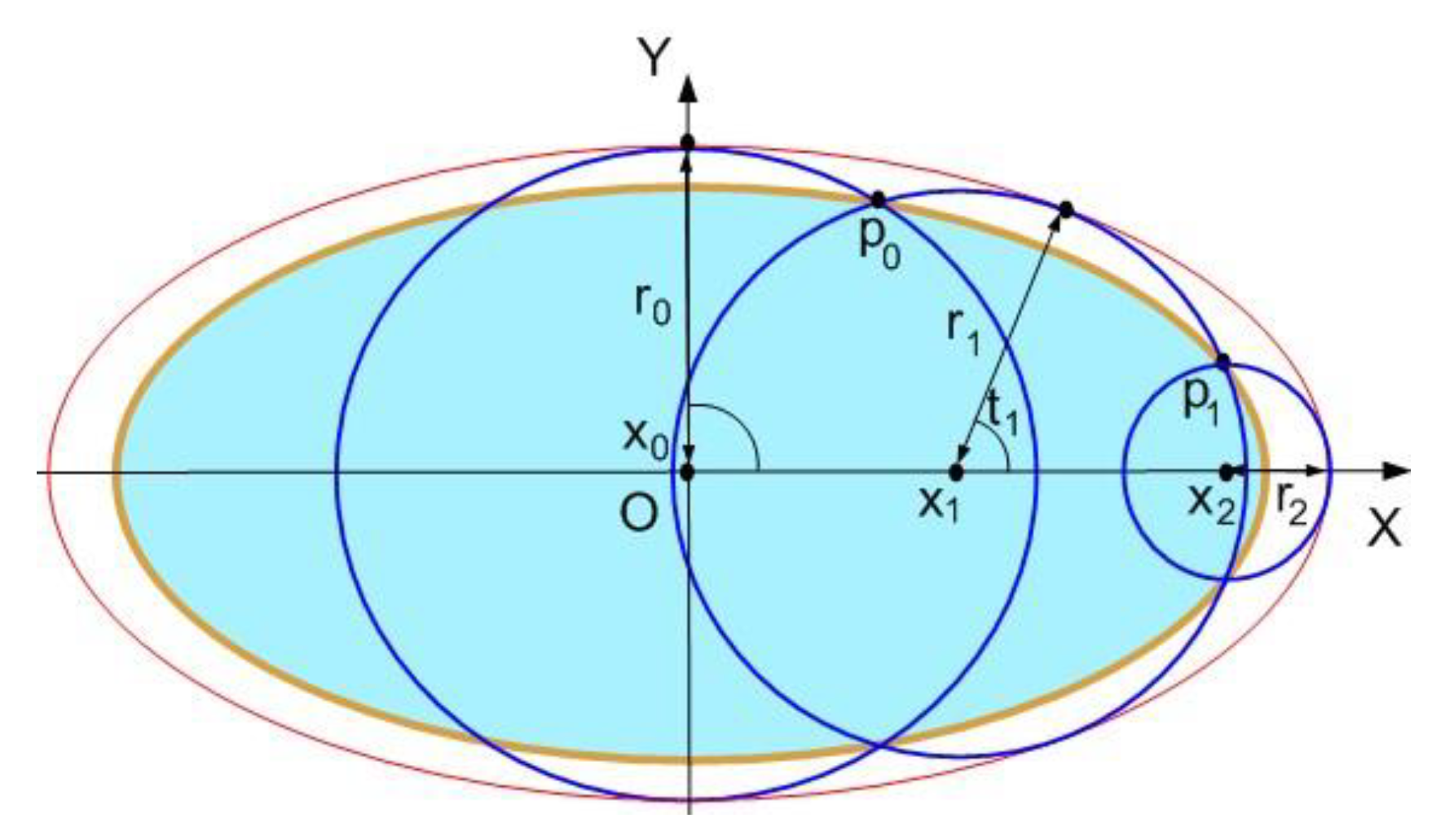
2. Basic Constructions
3. Solution Algorithm
3.1. Solution Algorithm for Stage 1
3.2. Solution Algorithm for the Stage 2
4. Computational Results
- (a)
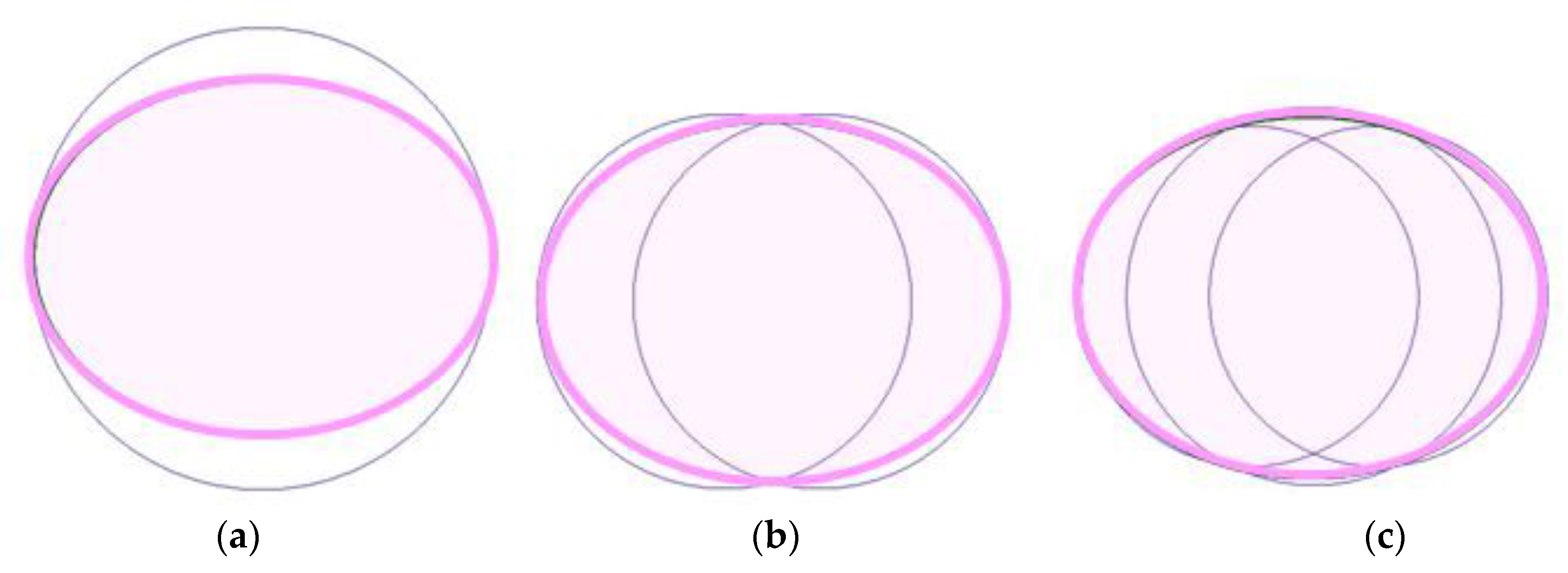
- For , the solution with one covering circle is presented in Figure 5a:
- (b)
- For , the solution with an even number of covering circles is shown in Figure 5b:{0.265385,−0.265385}, and{1.034615, 1.034615}.
- (c)
- For , the solution with an odd number of covering circles is given in Figure 5c:{0.357061, −0.357061, 0.000},{0.942939, 0.942939, 1.040356}.
- (a)
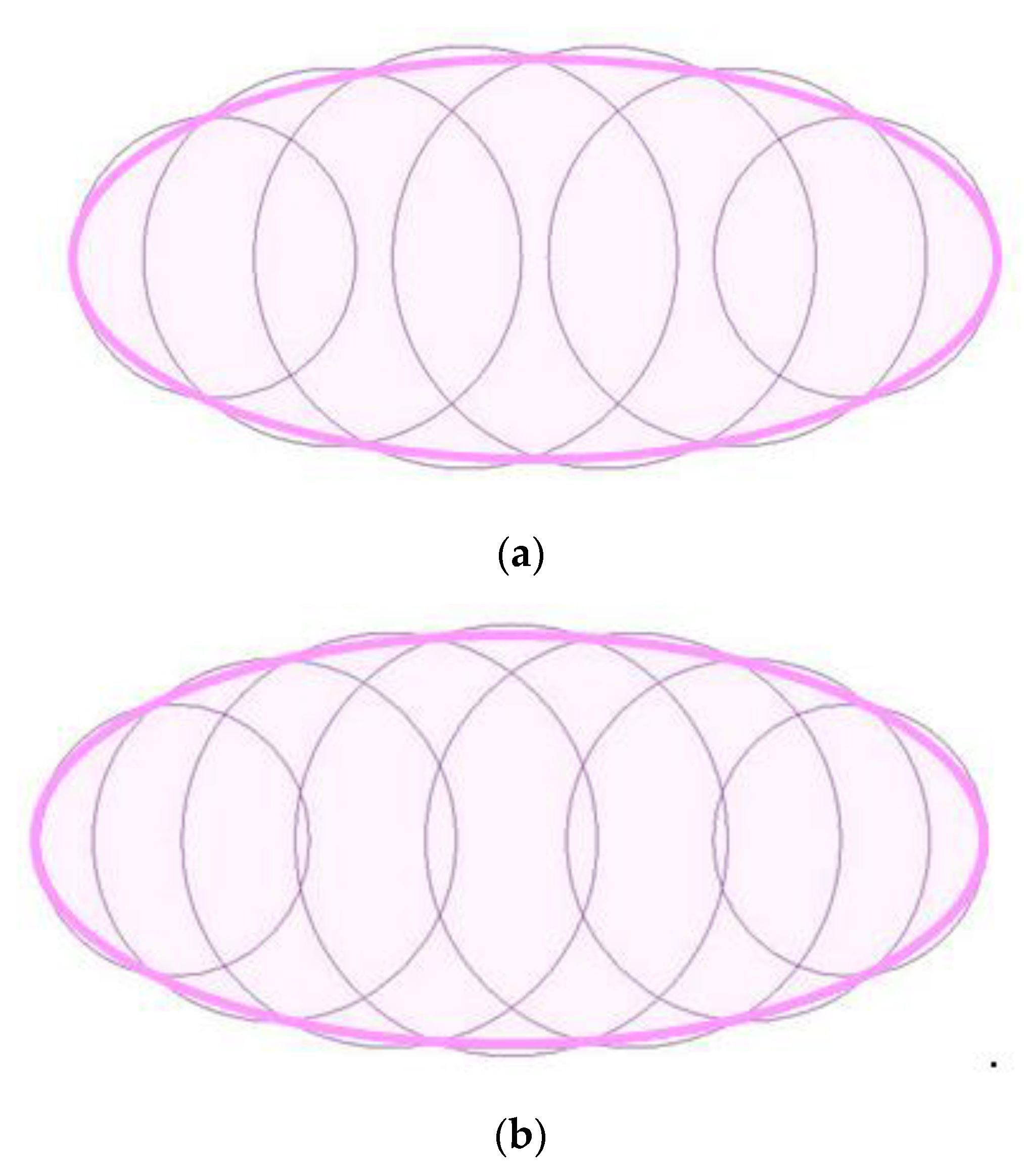
- The optimized cover with an even number of circles is presented in Figure 6a:{1.596217, −1.596217, 1.008362, −1.008362, 0.344754, −0.344754},{0.703783, 0.703783, 0.942524, 0.942524 1.057759, 1.057759}.
- (b)
- The optimized cover with an odd number of circles is shown in Figure 6b:{1.638879, −1.638879, 1.146544, −1.146544, 0.589831, −0.589831, 0.0000},{0.661121, 0.661121, 0.883641, 0.883641, 1.011495, 1.011495, 1.053720}.
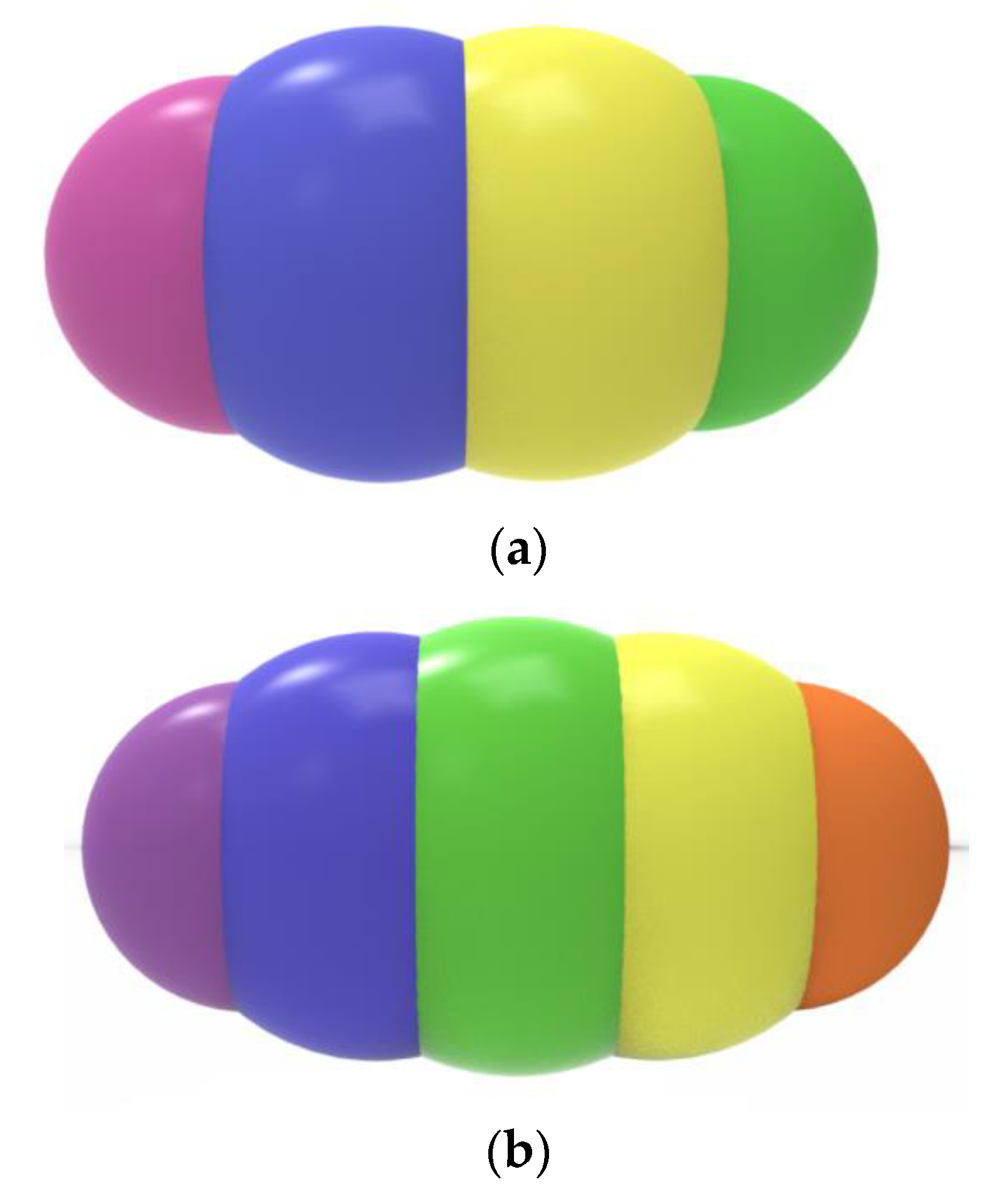
- (a)
- The optimized cover with an even number of spheres is presented in Figure 7a:{1.054209, −1.054209, 0.367367, −0.367367},{0.845791, 0.845791, 1.065344, 1.065344}.
- (b)
- The optimized cover (for2) with an odd number of spheres is shown in Figure 7b:{1.229404, −1.229404, 0.644245, −0.644245, 0.0000},{0.770596, 0.770596, 0.996786, 0.996786, 1.070009}.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
- 1.
- Deriving.
- 2.
- Deriving.
- 3.
- Deriving.
References
- Bernal, J.D. A geometrical approach to the structure of liquids. Nature 1959, 183, 141–147. [Google Scholar] [CrossRef]
- Stillinger, F.H.; Marzio, E.A.D.; Kornegay, R.L. Systematic approach to explanation of the rigid disk phase transition. J. Chem. Phys. 1964, 40, 1564–1576. [Google Scholar] [CrossRef]
- Makse, H.; Kurchan, J. Testing the thermodynamic approach to granular matter with a numerical model of a decisive experiment. Nature 2002, 415, 614–617. [Google Scholar] [CrossRef] [PubMed]
- Costamagna, P.; Costa, P.; Antonucci, V. Micro-modelling of solid oxide fuel cell electrodes. Electrochim. Acta 1998, 43, 375–394. [Google Scholar] [CrossRef]
- Zerhouni, O.; Tarantino, M.G.; Danas, K. Numerically-aided 3D printed random isotropic porous materials approaching the Hashin-Shtrikman bounds. Compos. Part B Eng. 2019, 156, 344–354. [Google Scholar] [CrossRef] [Green Version]
- Gan, J.; Yu, A.; Zhou, Z. DEM simulation on the packing of fine ellipsoids. Chem. Eng. Sci. 2016, 156, 64–76. [Google Scholar] [CrossRef]
- Gately, R.D.; Panhuis, M. Filling of carbon nanotubes and nanofibres. Beilstein J. Nanotechnol. 2015, 6, 508–516. [Google Scholar] [CrossRef] [Green Version]
- Ustach, V.; Faller, R. The raspberry model for protein-like particles: Ellipsoids and confinement in cylindrical pores. Eur. Phys. J. Spec. Top. 2016, 225, 1643–1662. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Zhao, L.; Fuh, J.Y.H.; Lee, H.P. Effect of Porosity on Mechanical Properties of 3D Printed Polymers: Experiments and Micromechanical Modeling Based on X-ray Computed Tomography Analysis. Polymers 2019, 11, 1154. [Google Scholar] [CrossRef] [Green Version]
- Li, C.X.; Zou, R.P.; Pinson, D.; Yu, A.B.; Zhou, Z.Y. An experimental study of packing of ellipsoids under vibrations. Powder Technol. 2020, 361, 45–51. [Google Scholar] [CrossRef]
- Akeb, H. A Look-Ahead-Based Heuristic for Packing Spheres into a Bin: The Knapsack Case. Procedia Comput. Sci. 2015, 65, 652–661. [Google Scholar] [CrossRef] [Green Version]
- Stoyan, Y.; Scheithauer, G.; Yaskov, G. Packing Unequal Spheres into Various Containers. Cybern. Syst. Anal. 2016, 52, 419–426. [Google Scholar] [CrossRef]
- Stetsyuk, P.; Romanova, T.; Scheithauer, G. On the global minimum in a balanced circular packing problem. Optim. Lett. 2016, 10, 1347–1360. [Google Scholar] [CrossRef]
- Hifi, M.; Yousef, L. A local search-based method for sphere packing problems. Eur. J. Oper. Res. 2019, 274, 482–500. [Google Scholar] [CrossRef]
- Litvinchev, I.; Infante, L.; Ozuna, L. Packing circular-like objects in a rectangular container. J. Comput. Syst. Sci. Int. 2015, 54, 259–267. [Google Scholar] [CrossRef]
- Torres-Escobar, R.; Marmolejo-Saucedo, J.A.; Litvinchev, I. Binary monkey algorithm for approximate packing non-congruent circles in a rectangular container. Wirel. Netw. 2018. [Google Scholar] [CrossRef]
- Bertei, A.; Chueh, C.-C.; Pharoah, J.G.; Nicolella, C. Modified collective rearrangement sphere-assembly algorithm for random packings of nonspherical particles: Towards engineering applications. Powder Technol. 2014, 253, 311–324. [Google Scholar] [CrossRef]
- Kallrath, J. Packing ellipsoids into volume-minimizing rectangular boxes. J. Glob. Optim. 2017, 67, 151–185. [Google Scholar] [CrossRef]
- Birgin, E.; Lobato, R. A matheuristic approach with nonlinear subproblems for large-scale packing of ellipsoids. Eur. J. Oper. Res. 2019, 272, 447–464. [Google Scholar] [CrossRef]
- Kampas, F.; Castillo, I.; Pintér, J. Optimized ellipse packings in regular polygons. Optim. Lett. 2019, 13, 1583–1613. [Google Scholar] [CrossRef]
- Pankratov, A.; Romanova, T.; Litvinchev, I. Packing ellipses in an optimized rectangular container. Wirel. Netw. 2018. [Google Scholar] [CrossRef]
- Pankratov, A.; Romanova, T.; Litvinchev, I. Packing ellipses in an optimized convex polygon. J. Glob. Optim. 2019, 75, 495–522. [Google Scholar] [CrossRef]
- Romanova, T.; Stoyan, Y.; Pankratov, A.; Litvinchev, I.; Avramov, K.; Chernobryvko, M.; Yanchevskyi, I.; Mozgova, I.; Bennell, J. Optimal layout of ellipses and its application for additive manufacturing. Int. J. Prod. Res. 2019. [Google Scholar] [CrossRef]
- Litvinchev, I.; Infante, L.; Ozuna, L. Approximate Circle Packing in a Rectangular Container: Integer Programming Formulations and Valid Inequalities. In Lecture Notes in Computer Science; Gonzalez-Ramirez, R.G., Ed.; Springer: Berlin/Heidelberg, Germany, 2014; Volume 8760, pp. 47–60. [Google Scholar]
- Jones, D.R. A fully general, exact algorithm for nesting irregular shapes. J. Glob. Optim. 2014, 59, 367–404. [Google Scholar] [CrossRef]
- Rocha, P.; Gomes, A.M.; Rodrigues, R.; Toledo, F.M.B.; Andretta, M. Constraint aggregation in non-linear programming models for nesting problems. In Computational Management Science: State of the Art 2014; Fonseca, J.R., Weber, G.-W., Telhada, J., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 175–180. [Google Scholar]
- Yuan, Y.; Liu, L.; Deng, W.; Li, S. Random-packing properties of spheropolyhedra. Powder Technol. 2019, 351, 186–194. [Google Scholar] [CrossRef]
- Birgin, E.; Bustamante, L.; Callisaya, H.; Martnez, J. Packing circles within ellipses. Int. Trans. Oper. Res. 2013, 20, 365–389. [Google Scholar] [CrossRef] [Green Version]
- Wachter, A.; Biegler, L. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Programm. 2006, 106, 25–57. [Google Scholar] [CrossRef]
- Stoyan, Y.; Romanova, T. Mathematical models of placement optimisation: Two- and three-dimensional problems and applications. In Modeling and Optimization in Space Engineering; Fasano, G., Pintér, J., Eds.; Springer Optimization and its Applications: New York, NY, USA, 2013; Volume 73, pp. 363–388. [Google Scholar]
- Stoyan, Y.; Pankratov, A.; Romanova, T. Cutting and packing problems for irregular objects with continuous rotations: Mathematical modeling and nonlinear optimization. J. Oper. Res. Soc. 2016, 67, 786–800. [Google Scholar] [CrossRef]
- Romanova, T.; Bennell, J.; Stoyan, Y.; Pankratov, A. Packing of concave polyhedra with continuous rotations using nonlinear optimization. Eur. J. Oper. Res. 2018, 268, 37–53. [Google Scholar] [CrossRef]
- Kiseleva, E.M.; Lozovskaya, L.I.; Timoshenko, E.V. Solution of continuous problems of optimal covering with spheres using optimal set-partition theory. Cybern. Syst. Anal. 2009, 45, 421–437. [Google Scholar] [CrossRef]
- Scheithauer, G.; Stoyan, Y.G.; Romanova, T.; Krivulya, A. Covering a polygonal region by rectangles. Comput. Optim. Appl. Springer Neth. 2011, 48, 675–695. [Google Scholar]
- Yakovlev, S.; Kartashov, O.; Komyak, V.; Shekhovtsov, S.; Sobol, O.; Yakovleva, I. Modeling and simulation of coverage problem in geometric design systems. In Proceedings of the 15th International Conference on the Experience of Designing and Application of CAD Systems, CADSM 2019, Lviv, Ukraine, 26 February–2 March 2019; pp. 20–23. [Google Scholar]
- Torres-Escobar, R.; Marmolejo-Saucedo, J.A.; Litvinchev, I.; Vasant, P. Monkey algorithm for packing circles with binary variables. In Intelligent Computing & Optimization. ICO 2018; Vasant, P., Zelinka, I., Weber, G.-W., Eds.; Springer International Publishing: Cham, Switzerland, 2019; Volume 866, pp. 547–559. [Google Scholar]









© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pankratov, A.; Romanova, T.; Litvinchev, I.; Marmolejo-Saucedo, J.A. An Optimized Covering Spheroids by Spheres. Appl. Sci. 2020, 10, 1846. https://doi.org/10.3390/app10051846
Pankratov A, Romanova T, Litvinchev I, Marmolejo-Saucedo JA. An Optimized Covering Spheroids by Spheres. Applied Sciences. 2020; 10(5):1846. https://doi.org/10.3390/app10051846
Chicago/Turabian StylePankratov, Alexander, Tatiana Romanova, Igor Litvinchev, and Jose Antonio Marmolejo-Saucedo. 2020. "An Optimized Covering Spheroids by Spheres" Applied Sciences 10, no. 5: 1846. https://doi.org/10.3390/app10051846
APA StylePankratov, A., Romanova, T., Litvinchev, I., & Marmolejo-Saucedo, J. A. (2020). An Optimized Covering Spheroids by Spheres. Applied Sciences, 10(5), 1846. https://doi.org/10.3390/app10051846