Implementation and Experimental Verification of Smart Junction Box for Low-Voltage Automotive Electronics in Electric Vehicles


Abstract
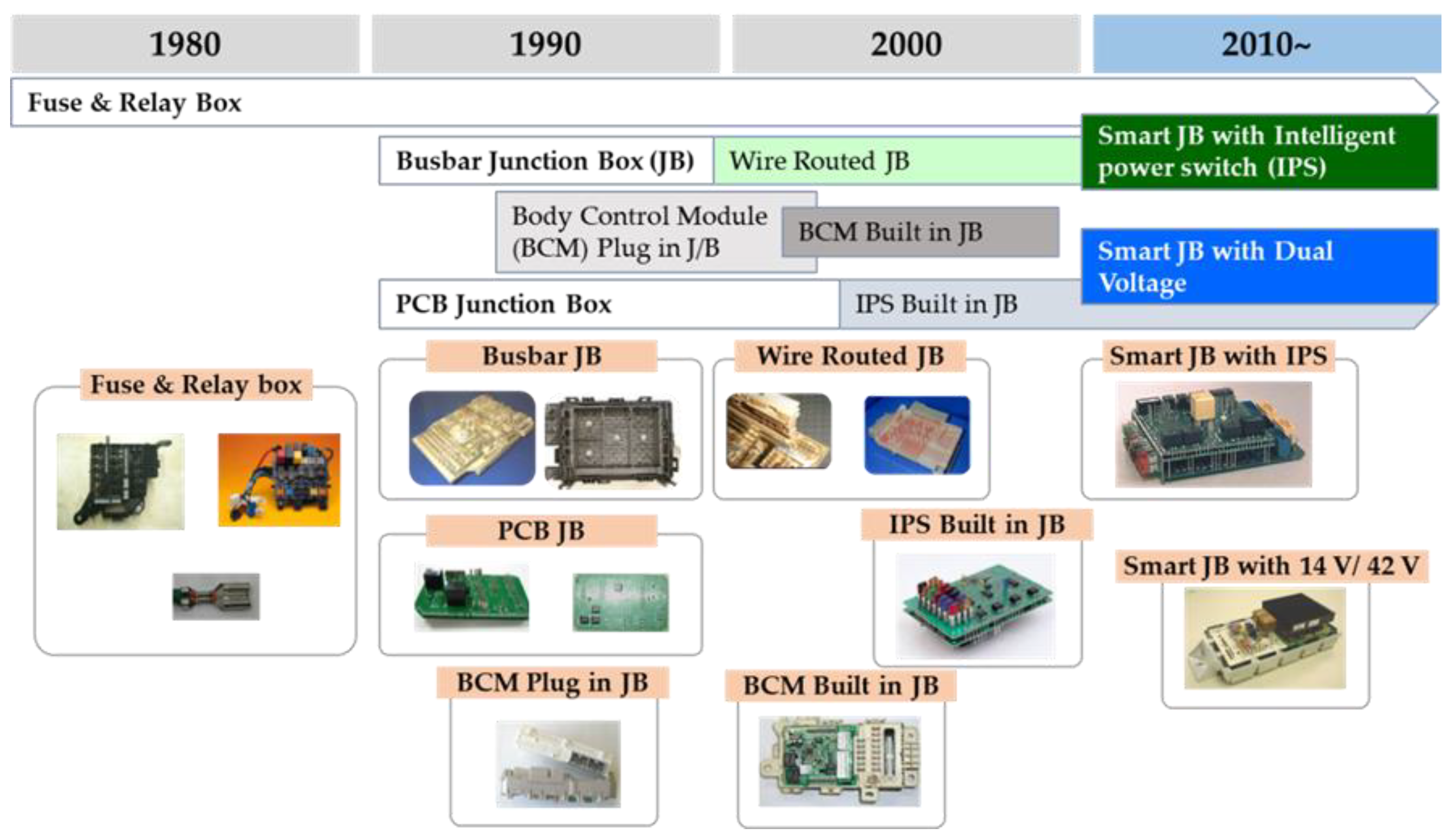
:1. Introduction
2. SJB Implementation
2.1. Design of the SJB PCB Module
- Main power supply circuit: converts the 13.5 V (input) to 5 V (output), as required by the MCU,
- Control MCU: the MCU and its associated peripheral circuits,
- IPS: the IPS and the peripheral circuits required for each load capacity,
- CAN: includes one high speed and one low speed 1-channel CAN bus,
- Watchdog: circuit designed to detect abnormalities in the operation of the MCU, and
- Interface and I/O: Interface circuitry for processing external input signals and input/output circuitry to and from the other circuits in the SJB.
- A terminal block for connection purposes,
- A fuse for power distribution,
- Relay and driver circuits, and
- I/O expansion circuits that support connection to external input signal processors.
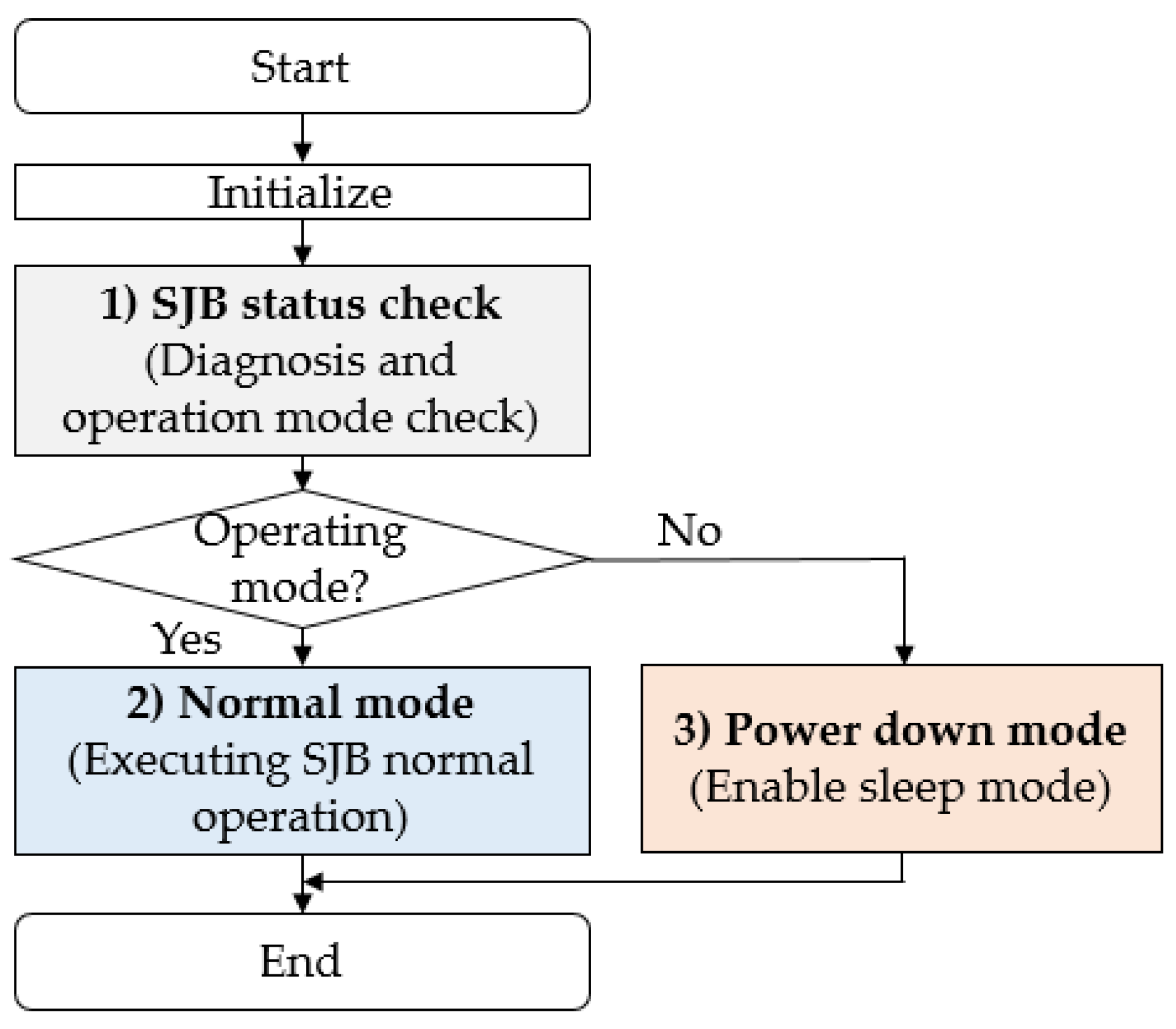
2.2. Design of SJB Software
- SJB status check: determine the status of the SJB by conducting a diagnostic check of the input voltages. If an error is detected, then switch to power down mode by using the algorithm in Appendix A.
- Normal mode: Monitor the software status and execute any requested load control commands (headlight: duty cycle control, other IPS loads: On/Off control). During IPS operation, monitor the status of the IPS by using the algorithm in Appendix B.
- Power down mode: When an error is detected, execute sleep mode and provide an error indication to the controller. Then, wait for a wake-up or reset signal to be received through the CAN bus before restarting. The algorithm executed in this step is provided in Appendix C.
3. Experimental Verification of the SJB
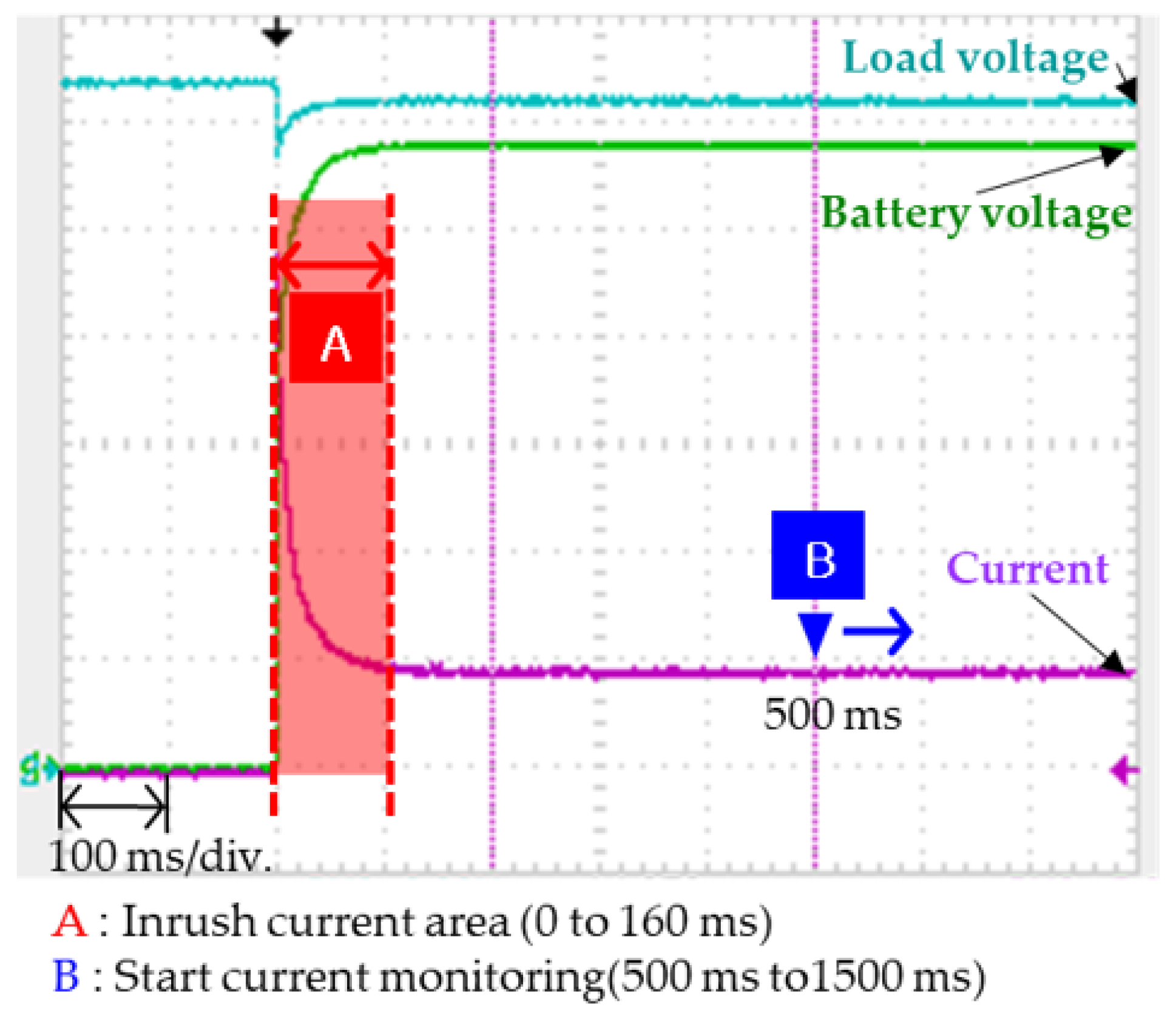
3.1. Load Operation Test (On/Off Control)
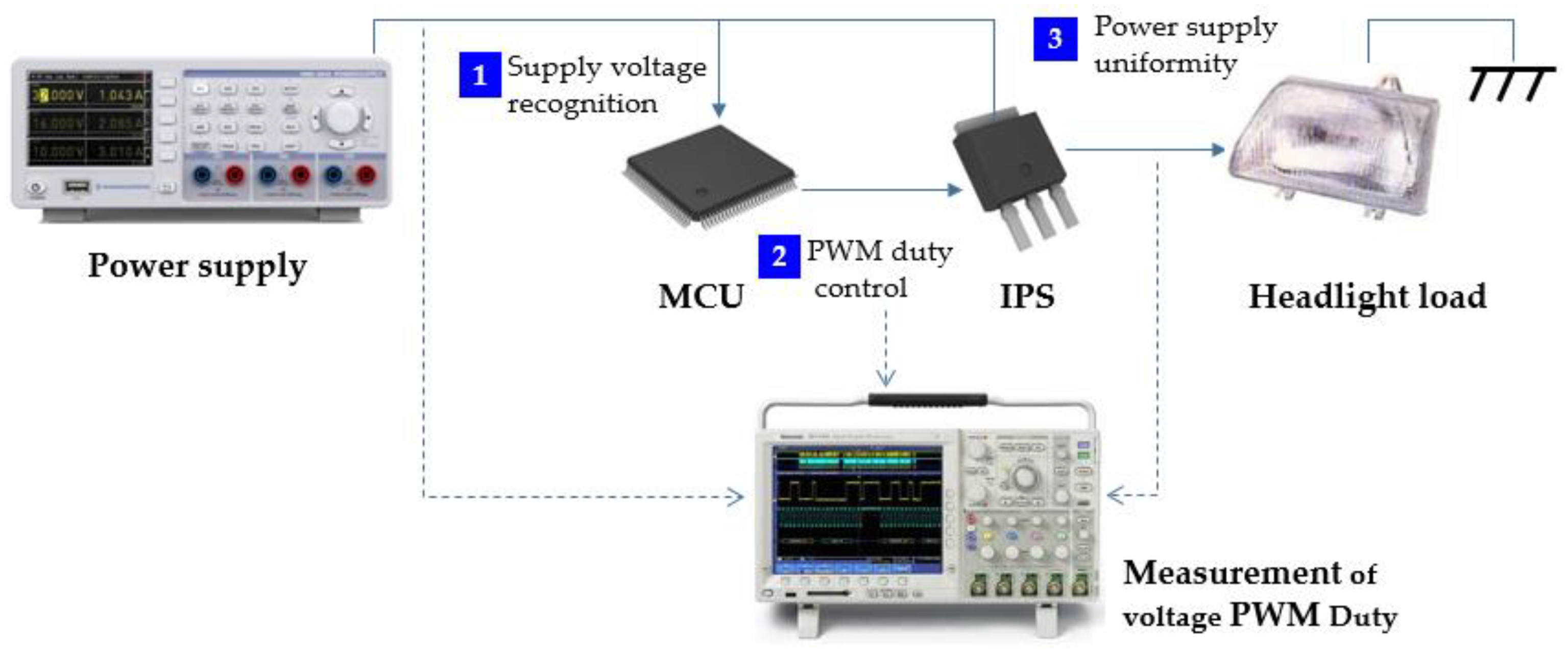
3.2. Assessing the Uniformity of the Supplied Power in the Presence of Supply Voltage Fluctuations
3.3. Protection and Diagnostic Tests
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CAN | Controller area network |
| HSCAN | High speed CAN |
| LSCAN | Low speed CAN |
| MCU | Micro controller unit |
| BCM | Body control module |
| JB | Junction box |
| SJB | Smart junction box |
| IPS | Intelligent power switch |
| LS | Low-side switch |
| HS | High-side switch |
| H/LP | Head lamp |
| LH | Left hand (Left side) |
| RH | Right hand (Right side) |
| FRT | Front |
| ACC | Accessory |
Appendix A
| Algorithm A1. SJB Status Check(Diagnosis(), Mode Check()) |
| if(Diagnostic_Process() == OK) SJB_Control(); |
| else SJB_Control_Error(); |
| Ubyte Diagnostic_Process(void) |
| { |
| Ubyte ci; |
| if((giPower_LH_Analog) && (giPower_RH_Analog) < 409) ci = NOK; |
| Else ci = OK |
| Return ci; } |
| Void SJB_Control(void) |
| { |
| if(gcSJB_Status == 1) Normal_Mode(); |
| Else Power_Down_Mode(); |
| } |
Appendix B
| Algorithm A2. SJB Normal Mode(IPS Control) |
| void Normal_Mode(void) |
| { |
| IPS_Status_Chk(); |
| if((gcH_LP_sig) || (gcFog_sig)) HLP_Operating(); |
| else if(gcH_LP_sig == OFF) HLP_OFF(); |
| Else FOG_OFF(); |
| if((gcTail_sig) || (gcInterior_sig) || (gcTurnSig) || (gcEmergency) || (gcWP_INT_Mode) || (gcWP_LO_Mode)) IPS_WP_Operating(); |
| if((!gcTail_sig) || (!gcInterior_sig) || (!gcTurnSig) || (!gcEmergency) || (!gcWP_INT_Mode) || (!gcWP_LO_Mode)){ |
| if(gcTail_sig == OFF) IPS_Tail_OFF(); |
| if(gcInterior_sig == OFF) IPS_Interior_OFF(); |
| if((gcTurnSig == OFF) && (gcEmergency == OFF)) IPS_TSIG_OFF(); |
| if((gcWP_INT_Mode == OFF) && (gcWP_LO_Mode == OFF)) IPS_WP_OFF(); |
| } |
| } |
Appendix C
| Algorithm A3. SJB Power Down Mode |
| void |
| { |
| SJB_Control(void) |
| if(gcSJB_Status == 1) Normal_Mode(); |
| else Powedown_Mode(); |
| } |
| void Powerdown_Mode(void) |
| { |
| pOut_ENT = 1; |
| pOut_NSTB = 0; |
| } |
References
- Guttowski, S.; Weber, S.; Hoene, E.; John, W.; Reichl, H. EMC Issues in Cars with Electric Drives. In Proceedings of the 2003 IEEE Symp Electromagnetic Compatibility. Symposium Record (Cat. No.03CH37446), Boston, MA, USA, 18–22 August 2003; Volume 2, pp. 777–782. [Google Scholar] [CrossRef]
- Kassakian, J.G.; Jahns, T.M. Evolving and Emerging Applications of Power Electronics in Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 47–58. [Google Scholar] [CrossRef]
- Drobnik, J.; Jain, P. Electric and Hybrid Vehicle Power Electronics Efficiency, Testing and Reliability. World Electr. Veh. J. 2013, 6, 719–730. [Google Scholar] [CrossRef] [Green Version]
- Yousaf, J.; Lee, D.; Han, J.; Lee, H.; Faisal, M.; Kim, J.; Nah, W. Near-Field Immunity Test Method for Fast Radiated Immunity Test Debugging of Automotive Electronics. Electronics 2019, 8, 797. [Google Scholar] [CrossRef] [Green Version]
- Ong, N.S.; Boothroyd, G. Assembly times for electrical connections and wire harnesses. Int. J. Adv. Manuf. Technol. 1991, 6, 155–179. [Google Scholar] [CrossRef]
- Ong, N.S. Activity-based cost tables to support wire harness design. Int. J. Prod. Econ. 1993, 29, 271–289. [Google Scholar] [CrossRef]
- Ruppert, T.; Abonyi, J. Software Sensor for Activity-Time Monitoring and Fault Detection in Production Lines. Sensors 2018, 18, 2346. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Evans, J.H. The Simplification of Vehicle Harness Designs through the Application of Active Junction Boxes. Proc. Inst. Mech. Eng. D J. Automob. Eng. 1990, 204, 29–33. [Google Scholar] [CrossRef]
- Afridi, K.K.; Tabors, R.D.; Kassakian, J.G. Alternative Electrical Distribution System Architectures for Automobiles. In Proceedings of the 1994 IEEE Workshop on Power Electronics in Transportation, Dearborn, MI, USA, 20–21 October 1994; pp. 33–38. [Google Scholar] [CrossRef]
- Dominguez-Garcia, A.D.; Kassakian, J.G.; Schindall, J.E. Reliability evaluation of the power supply of an electrical power net for safety-relevant applications. Reliab. Eng. Syst. Saf. 2006, 91, 505–514. [Google Scholar] [CrossRef]
- Harter, W.; Pfeiffer, W.; Dominke, P.; Ruck, G.; Blessing, P. Future Electrical Steering Systems: Realizations with Safety Requirements; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2000. [Google Scholar] [CrossRef]
- Hammett, R.C.; Babcock, P.S. Achieving 10-9 Dependability with Drive-By-Wire Systems; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2003. [Google Scholar] [CrossRef]
- Kim, M.; Bae, S.; Choung, S.H. Analysis on Reliability Characteristics of Power Electronic Devices for Aerial Vehicles. In Proceedings of the 2017 20th International Conference on Electrical Machines and Systems (ICEMS), Sydney, NSW, Australia, 11–14 August 2017. [Google Scholar] [CrossRef]
- Lim, H.; Park, J. Headlamp Modelling for Simulating the Capacity of Automotive Wiring Systems. Proc. Inst. Mech. Eng. D J. Automob. Eng. 2003, 217, 1043–1047. [Google Scholar] [CrossRef]
- Schmidt, C. Automotive Electronics—Enabling the Future of Individual Mobility. In Proceedings of the 2007 IEEE International Electron Devices Meeting, Washington, DC, USA, 10–12 December 2007; pp. 3–8. [Google Scholar] [CrossRef]
- Carvou, E.; Ben Jema, N.; Mitchell, B.; Gautherot, C.; Rivenc, J.; Colchen, L. Contact Behavior of Electrical Vehicle-battery Junction Box under High Shorting and Breaking Current. In Proceedings of the 26th International Conference Electrical Contacts (ICEC 2012), Beijing, China, 14–17 May 2012; pp. 151–155. [Google Scholar] [CrossRef]
- Fisher, P.; Jostins, J.; Hilmansen, S.; Kendall, K. Electronic integration of fuel cell and battery system in novel hybrid vehicle. J. Power Sources 2012, 220, 114–121. [Google Scholar] [CrossRef] [Green Version]
- Nordelöf, A.; Alatalo, M.; Söderman, M.L. A scalable life cycle inventory of an automotive power electronic inverter unit-part I: Design and composition. Int. J. Life Cycle Assess. 2019, 24, 78–92. [Google Scholar] [CrossRef] [Green Version]
- ISO Std. 10483-1:2004. Road Vehicles—Intelligent Power Switches—Part 1: High-Side Intelligent Power Switch; ISO: Geneva, Switzerland, 2004. [Google Scholar]
- Gu, C.; Wheeler, P.; Castellazzi, A.; Watson, A.J.; Effah, F. Semiconductor Devices in Solid-State/Hybrid Circuit Breakers: Current Status and Future Trends. Energies 2017, 10, 495. [Google Scholar] [CrossRef]
- ISO Std. 7637-2:2011. Road Vehicles—Electrical Disturbances from Conduction and Coupling—Part 2: Electrical Transient Conduction Along Supply Lines Only; ISO: Geneva, Switzerland, 2011. [Google Scholar]
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A Comprehensive Study of Key Electric Vehicle (EV) Components, Technologies, Challenges, Impacts, and Future Direction of Development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef] [Green Version]
- Lim, H.; Jung, D.-H.; Kwon, G.; Lee, Y.J.; Park, J.S. Downsizing an automotive junction box based on large current-carrying printed-circuit board optimization. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2017, 231, 267–278. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Requirements | Descriptions |
|---|---|---|
| Regulator | Output: 5 V, 200–500 mA Inhibit Enable | TLE727220 (Infineon):
|
| Micro Controller | ADC: 15 ch CAN: 2 ch I/O: >30 Pin | SAK-XC2364B-40F80L AA (Infineon):
|
| CAN Transceiver | Low speed: diagnosis, sleep mode (Inhibit mode) | TLE6254-3G (Low speed):
|
| EEPROM | SPI or IIC community | M95020 (ST):
|
| Items | Lamp Output [W] | Actual Current Consumption [A] | Specification of IPS |
|---|---|---|---|
| H/LP Low LH | 55 | 4.07 | BTS6142D (Infineon):
|
| H/LP Low RH | 55 | 4.11 | |
| H/LP High LH | 60 | 4.45 | |
| H/LP High RH | 60 | 4.51 | |
| Fog Lamp LH | 35 | 2.55 | |
| Fog Lamp RH | 35 | 2.59 |
| Items | Starting State | Switching Condition | Final State |
|---|---|---|---|
| A01 | Turn on (Initial mode) | Short | Turn on/off (Retry 10 times) |
| A02 | Status check | Less than 3 times ACC (on/off) | Turn on |
| A03 | Input diagnosis information | ACC off | Turn off (Error mode) |
| A04 | Status check | More than 3 times ACC (on/off) | Turn off (Error mode) |
| A05 | Turn on/off (Retry 10 times) | More than 10 times Retry | Turn off (Error mode) |
| A06 | Turn on/off (Retry 10 times) | Less than 10 times Retry | Input diagnosis information |
| A07 | Input diagnosis information | After entering the diagnosis (less than 20 ms) | Status check |
| Lamp Load | Output Power [W] | Battery Voltage [V] | Load Voltage [V] | Inrush Current [A] | Operating Current [A] |
|---|---|---|---|---|---|
| H/LP High LH | 55 | 12.7 | 10.1 | 26.6 | 4.7 |
| H/LP Low RH | 55 | 12.7 | 10.3 | 22.4 | 4.2 |
| H/LP Low LH | 55 | 12.7 | 10.6 | 23.2 | 4.2 |
| H/LP High RH | 55 | 12.7 | 10.1 | 22.6 | 4.5 |
| Fog LH | 35 | 12.7 | 10.8 | 21 | 2.8 |
| Fog RH | 35 | 12.7 | 10.6 | 18 | 2.8 |
| Headlight Load | Open Circuit Test | Short Circuit Test |
|---|---|---|
| H/LP High LH | Pass | Pass |
| H/LP Low RH | Pass | Pass |
| H/LP Low LH | Pass | Pass |
| H/LP High RH | Pass | Pass |
| Fog LH | Pass | Pass |
| Fog RH | Pass | Pass |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.W.; Baek, S.-W. Implementation and Experimental Verification of Smart Junction Box for Low-Voltage Automotive Electronics in Electric Vehicles. Appl. Sci. 2020, 10, 2214. https://doi.org/10.3390/app10072214
Lee SW, Baek S-W. Implementation and Experimental Verification of Smart Junction Box for Low-Voltage Automotive Electronics in Electric Vehicles. Applied Sciences. 2020; 10(7):2214. https://doi.org/10.3390/app10072214
Chicago/Turabian StyleLee, Sang Wook, and Soo-Whang Baek. 2020. "Implementation and Experimental Verification of Smart Junction Box for Low-Voltage Automotive Electronics in Electric Vehicles" Applied Sciences 10, no. 7: 2214. https://doi.org/10.3390/app10072214
APA StyleLee, S. W., & Baek, S. -W. (2020). Implementation and Experimental Verification of Smart Junction Box for Low-Voltage Automotive Electronics in Electric Vehicles. Applied Sciences, 10(7), 2214. https://doi.org/10.3390/app10072214