A Novel Hybrid Harmony Search Approach for the Analysis of Plane Stress Systems via Total Potential Optimization

 ,
,  ,
,  , and
, and 
Abstract
:1. Introduction
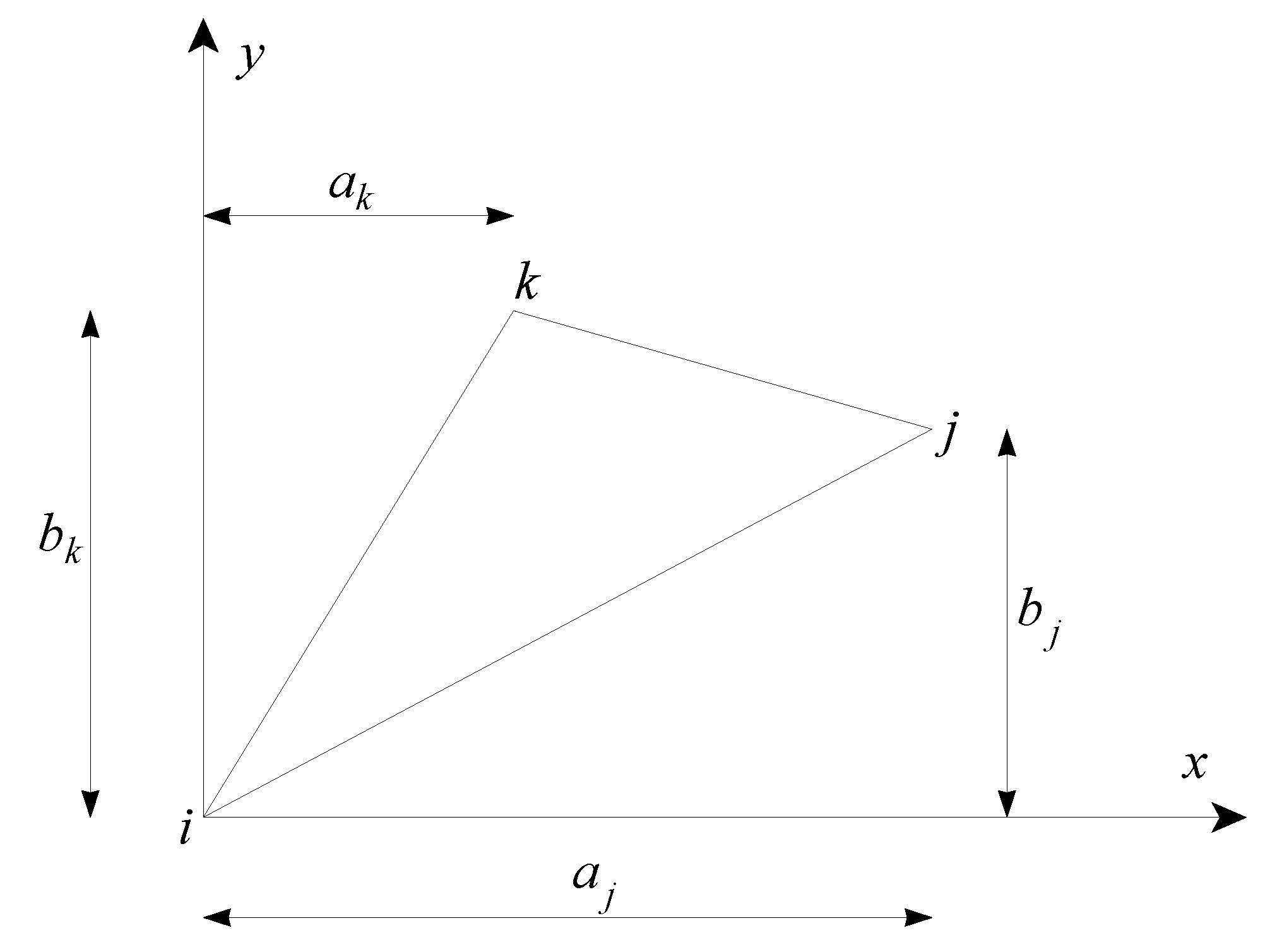
2. The Total Potential Energy of Plane Stress Members
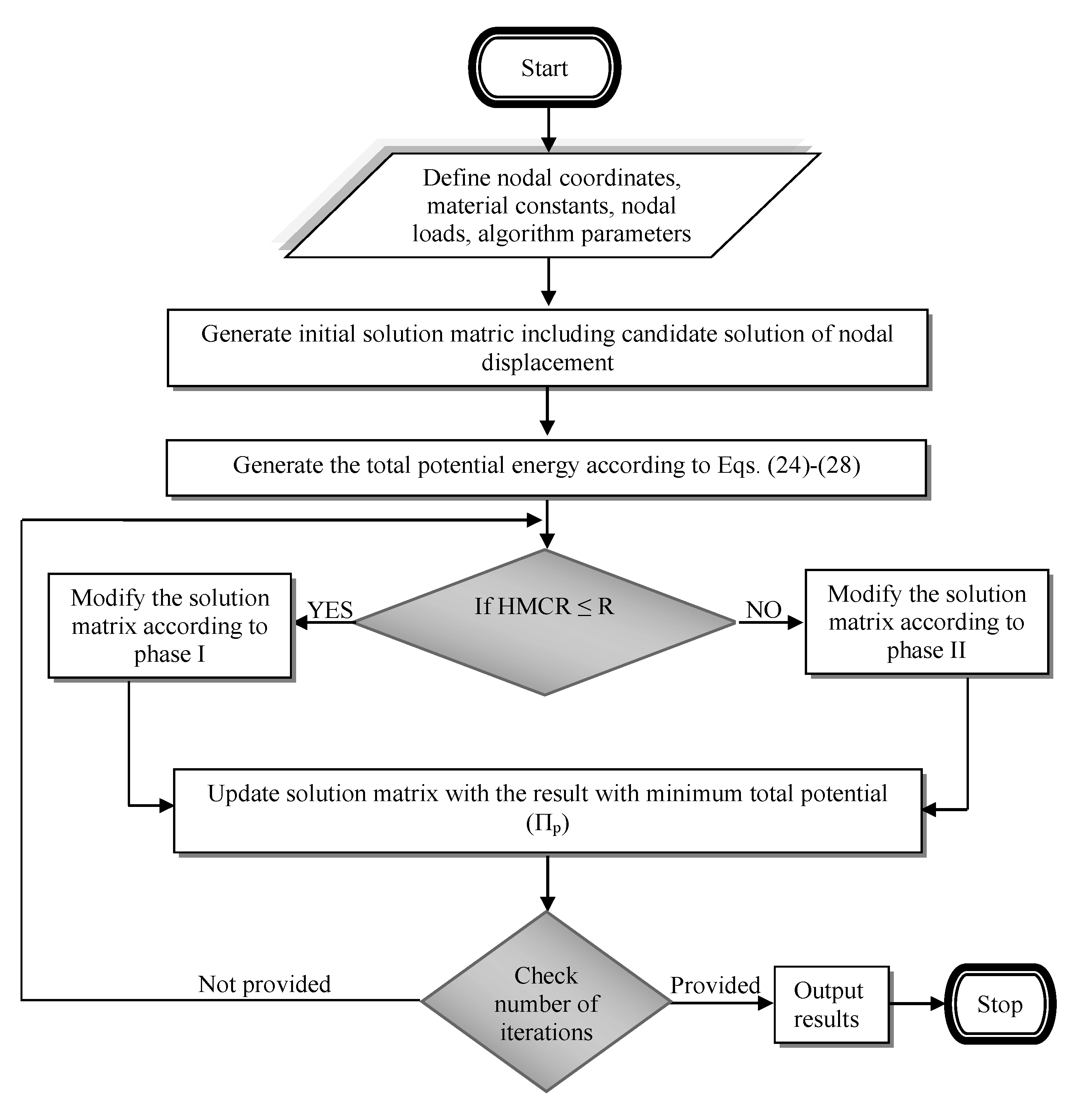
3. The Analysis Methodology
3.1. Classical Harmony Search
3.2. Hybridization of Harmony Search
4. Numerical Examples
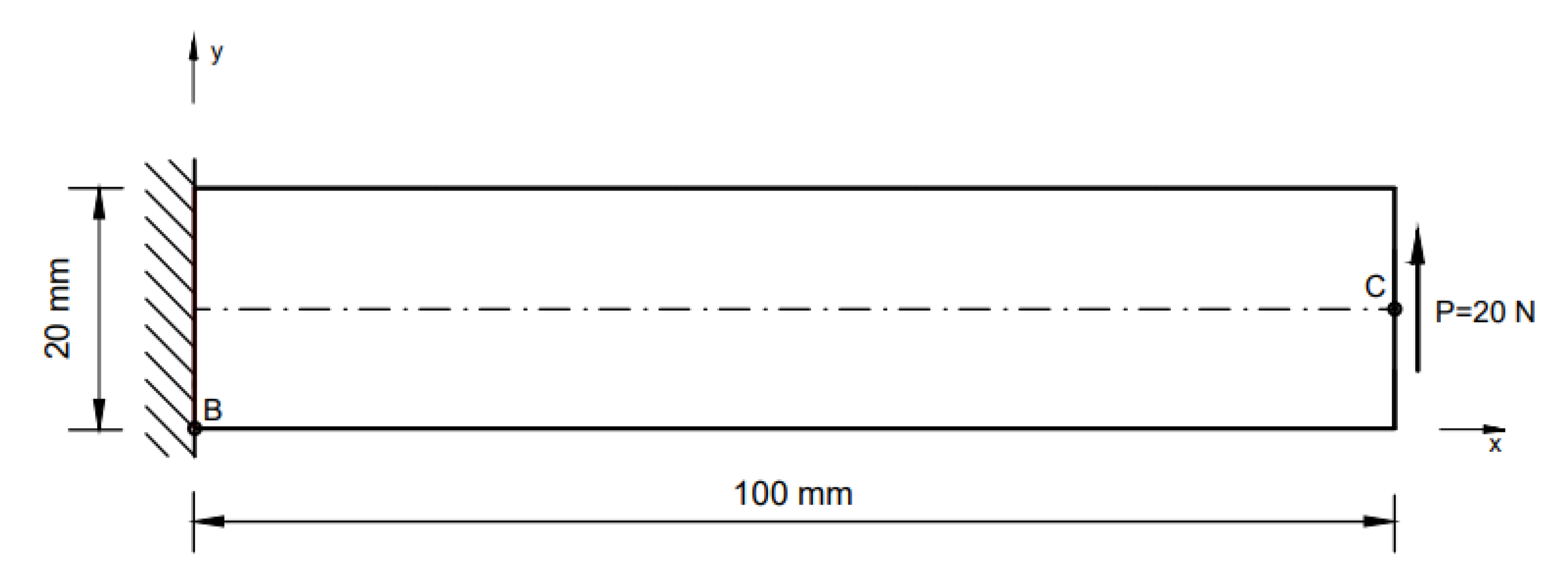
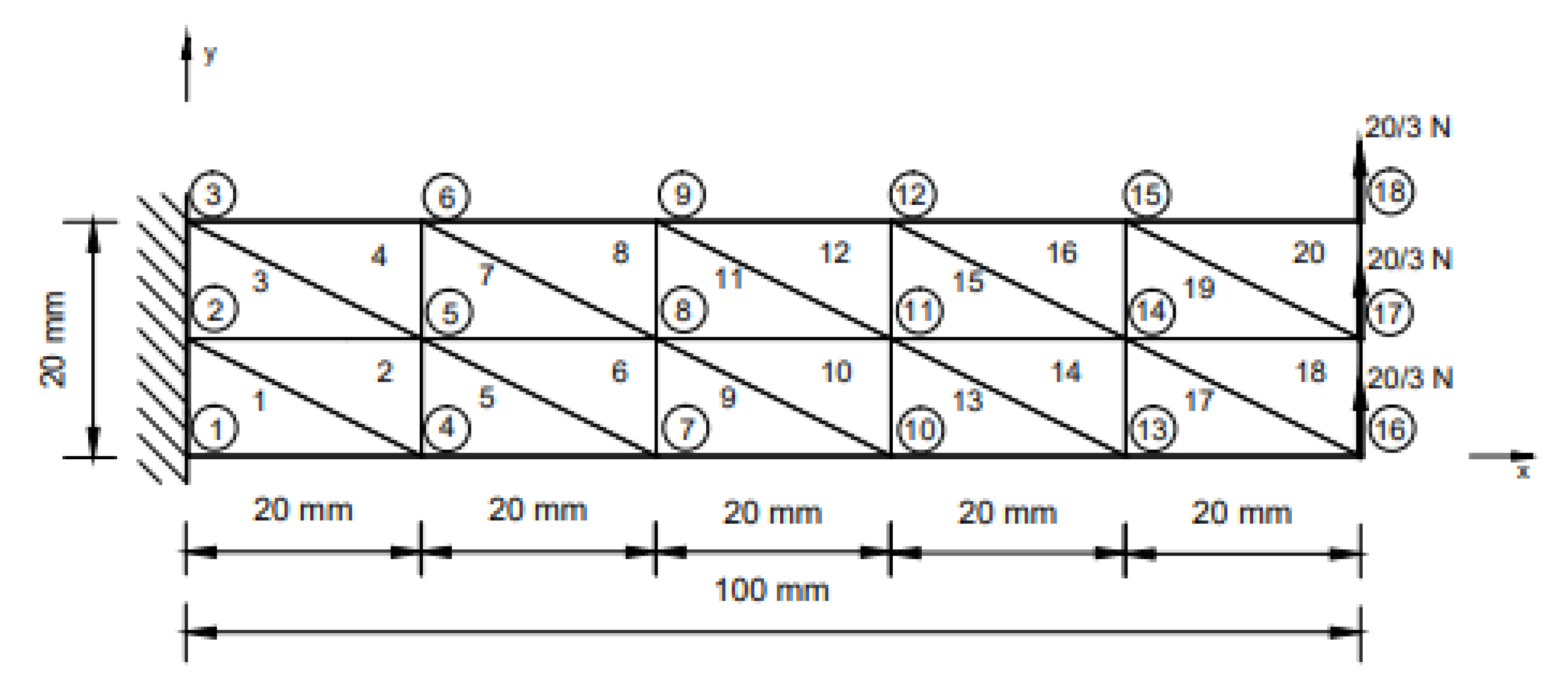
4.1. Structure 1: Cantilever Beam Under a Concentered Load
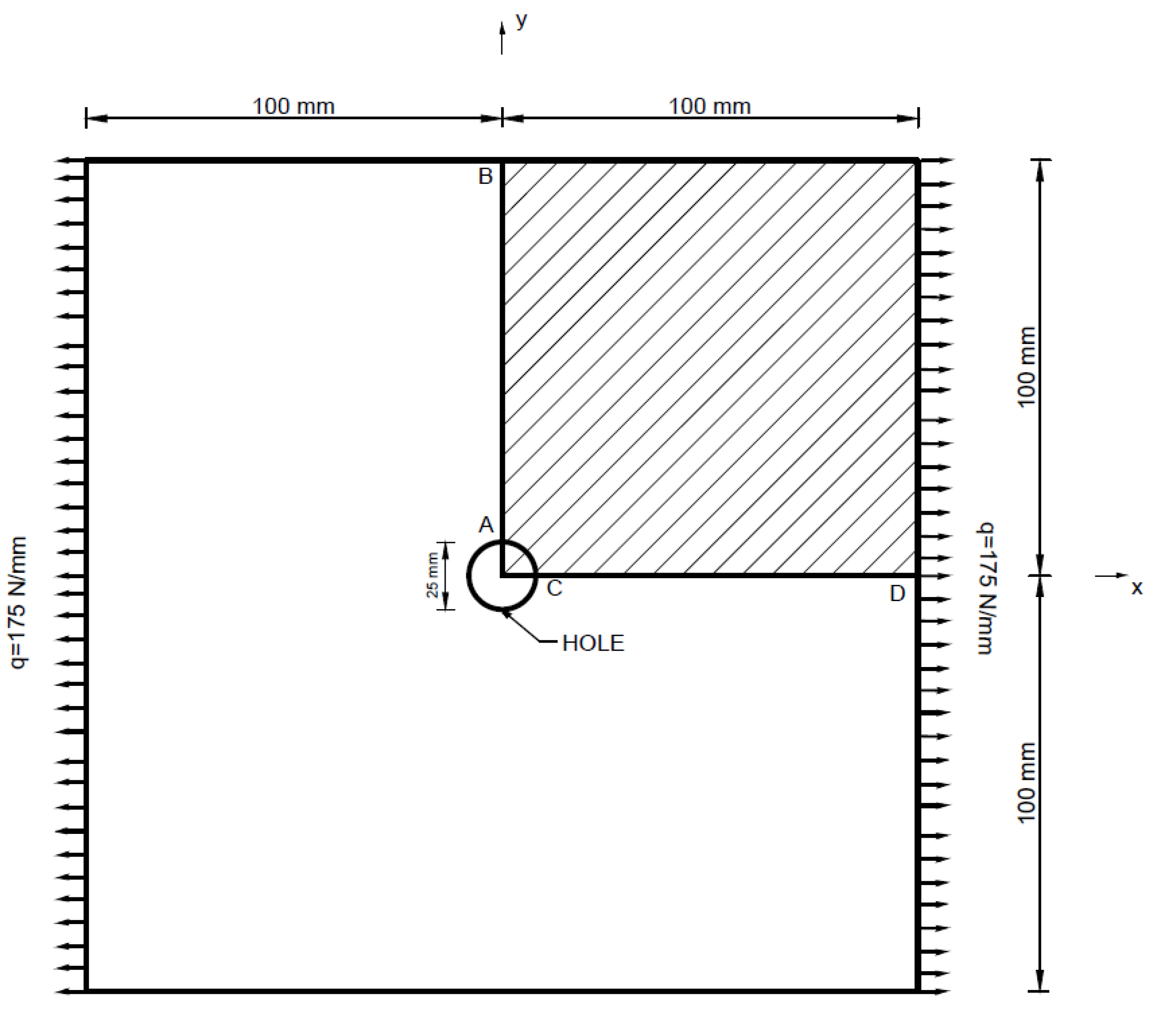
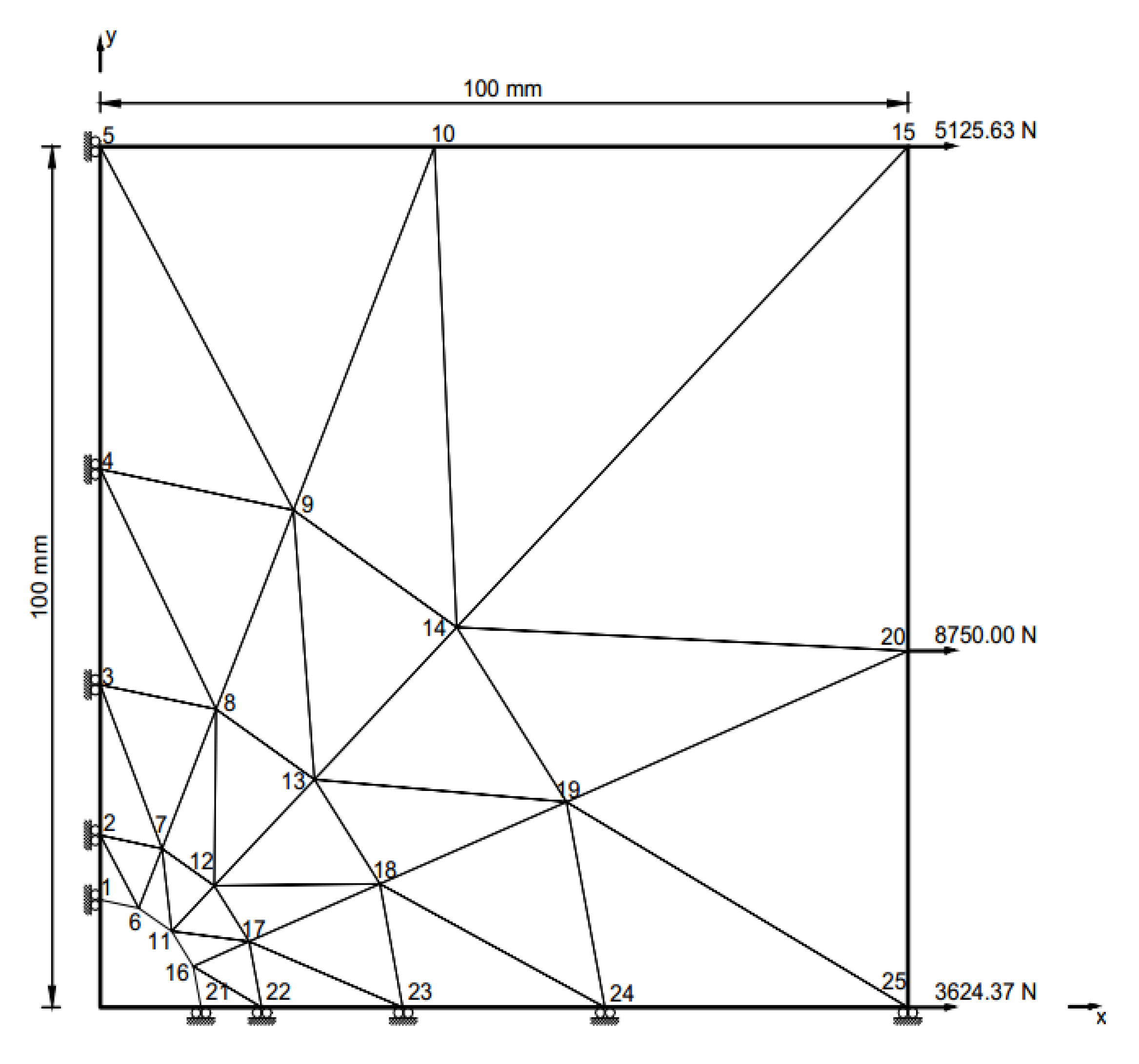
4.2. Structure 2. A Plate with the Hole in the Middle (32 Members-25 Nodes)
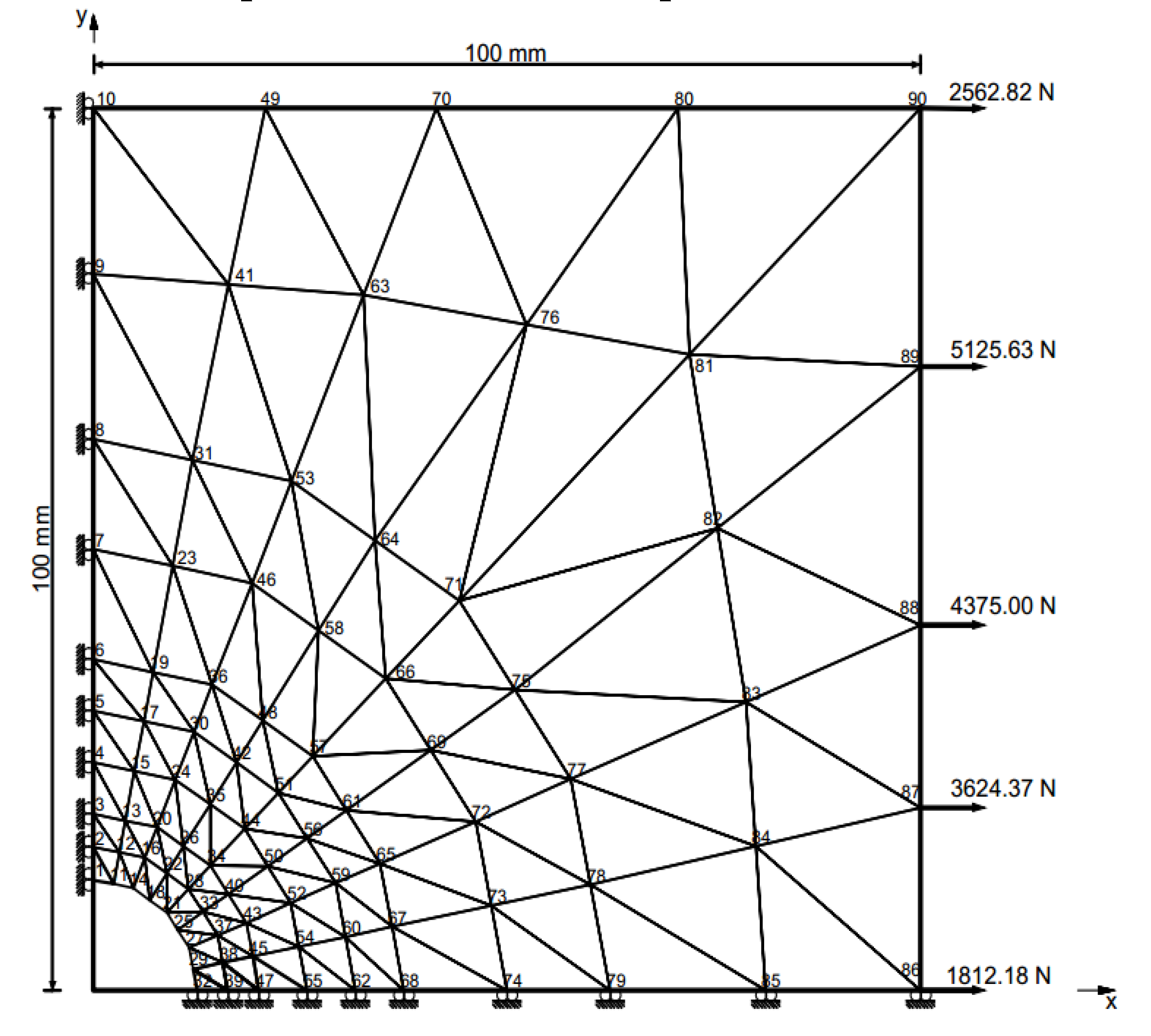
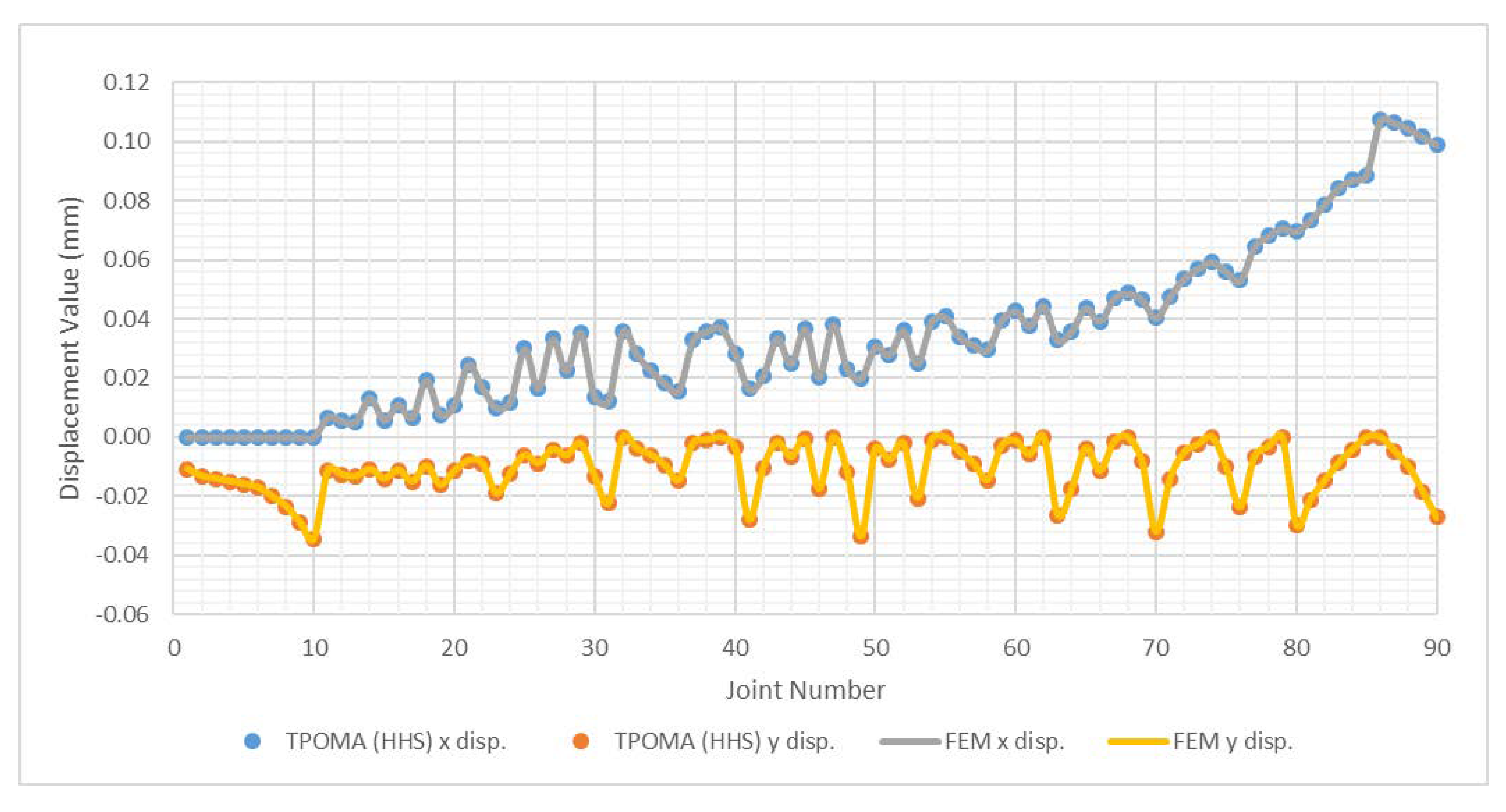
4.3. Structure 3. A Plate with a Hole in the Middle (144 Members and 90 Nodes)
5. Conclusions and Future Studies
Author Contributions
Funding
Conflicts of Interest
References
- Levy, R.; Spillers, W.R. Analysis of Geometrically Nonlinear Structures, 2nd ed.; Kluwer Academic Publishers: Dordtrecht, The Netherlands, 2003. [Google Scholar]
- Saffari, H.; Fadaee, M.J.; Tabatabaei, R. Nonlinear analysis of space trusses using modified normal flow algorithm. J. Struct. Eng. 2008, 134, 998–1005. [Google Scholar] [CrossRef]
- Krenk, S. Non-linear Modeling and Analysis of Solids and Structures; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Greco, M.; Menin, R.C.G.; Ferreira, I.P.; Barros, F.B. Comparison between two geometrical nonlinear methods for truss analyses. Struct. Eng. Mech. 2012, 41, 735–750. [Google Scholar] [CrossRef]
- Nazir, A.; Abate, K.M.; Kumar, A.; Jeng, J.Y. A state-of-the-art review on types, design, optimization, and additive manufacturing of cellular structures. Int. J. Adv. Manuf. Technol. 2019, 104, 3489–3510. [Google Scholar] [CrossRef]
- Toklu, Y.C. Nonlinear analysis of trusses through energy minimization. Comput. Struct. 2004, 82, 1581–1589. [Google Scholar] [CrossRef]
- Toklu, Y.C.; Bekdas, G.; Temur, R. Analysis of trusses by total potential optimization method coupled with harmony search. Struct. Eng. Mech. 2013, 45, 183–199. [Google Scholar] [CrossRef]
- Temür, R.; Türkan, Y.; Toklu, Y. Geometrically Nonlinear Analysis of Trusses Using Particle Swarm Optimization; Springer International Publishing: Basel, Switzerland, 2015. [Google Scholar]
- Toklu, Y.C.; Temur, R.; Bekdaş, G. Computation of non-unique solutions for trusses undergoing large deflections. Int. J. Comput. Methods 2015, 12, 1550022. [Google Scholar] [CrossRef]
- Temür, R.; Bekdaş, G.; Toklu, Y.C. Total potential energy minimization method in structural analysis considering material nonlinearity. Chall. J. Struct. Mech. 2017, 3, 129–133. [Google Scholar] [CrossRef]
- Toklu, Y.C.; Uzun, F. Analysis of tensegric structures by total potential optimization using metaheuristic algorithms. J. Aerosp. Eng. 2016, 29, 04016023. [Google Scholar] [CrossRef]
- Toklu, Y.C.; Bekdaş, G.; Temur, R. Analysis of cable structures through energy minimization. Struct. Eng. Mech. 2017, 62, 749–758. [Google Scholar]
- Bekdas, G.; Kayabekir, A.E.; Niğdeli, S.M.; Toklu, Y.C. Advanced energy based analyses of trusses employing hybrid metaheuristics. Struct. Des. Tall Spec. Build. 2019, 28, e1609. [Google Scholar] [CrossRef]
- Lee, K.S.; Geem, Z.W. A new structural optimization method based on the harmony search algorithm. Comput. Struct. 2004, 82, 781–798. [Google Scholar] [CrossRef]
- Lee, K.S.; Geem, Z.W.; Lee, S.H.; Bae, K.W. The harmony search heuristic algorithm for discrete structural optimization. Eng. Optim. 2005, 37, 663–684. [Google Scholar] [CrossRef]
- Kaveh, A.; Talatahari, S. Particle swarm optimizer, ant colony strategy and harmony search scheme hybridized for optimization of truss structures. Comput. Struct. 2009, 87, 267–283. [Google Scholar] [CrossRef]
- Hasançebi, O.; Erdal, F.; Saka, M.P. Adaptive harmony search method for structural optimization. J. Struct. Eng. 2010, 136, 419–431. [Google Scholar] [CrossRef]
- Martini, K. Harmony search method for multimodal size, shape, and topology optimization of structural frameworks. J. Struct. Eng. 2011, 137, 1332–1339. [Google Scholar] [CrossRef] [Green Version]
- Degertekin, S.O. Improved harmony search algorithms for sizing optimization of truss structures. Comput. Struct. 2012, 92, 229–241. [Google Scholar] [CrossRef]
- Gholizadeh, S.; Barzegar, A. Shape optimization of structures for frequency constraints by sequential harmony search algorithm. Eng. Optim. 2013, 45, 627–646. [Google Scholar] [CrossRef]
- Amini, F.; Ghaderi, P. Hybridization of harmony search and ant colony optimization for optimal locating of structural dampers. Appl. Soft Comput. 2013, 13, 2272–2280. [Google Scholar] [CrossRef]
- Bekdaş, G.; Nigdeli, S.M. Estimating optimum parameters of tuned mass dampers using harmony search. Eng. Struct. 2011, 33, 2716–2723. [Google Scholar] [CrossRef]
- Nigdeli, S.M.; Bekdaş, G. Optimum tuned mass damper design in frequency domain for structures. KSCE J. Civ. Eng. 2017, 21, 912–922. [Google Scholar] [CrossRef]
- Nigdeli, S.M.; Bekdaş, G.; Alhan, C. Optimization of seismic isolation systems via harmony search. Eng. Optim. 2014, 46, 1553–1569. [Google Scholar] [CrossRef]
- Jin, H.; Xia, J.; Wang, Y.Q. Optimal sensor placement for space modal identification of crane structures based on an improved harmony search algorithm. J. Zhejiang Univ.-Sci. A 2015, 16, 464–477. [Google Scholar] [CrossRef] [Green Version]
- Mashayekhi, M.; Salajegheh, E.; Dehghani, M. Topology optimization of double and triple layer grid structures using a modified gravitational harmony search algorithm with efficient member grouping strategy. Comput. Struct. 2016, 172, 40–58. [Google Scholar] [CrossRef]
- Kazemi, E.N.; Shabakhty, N.; Abbasi, K.M.; Sanayee, M.S. Structural reliability: An assessment using a new and efficient two-phase method based on artificial neural network and a harmony search algorithm. Civ. Eng. Infrastruct. J. 2016, 49, 1–20. [Google Scholar]
- Daloglu, A.T.; Artar, M.; Ozgan, K.; Karakas, A.I. Optimum design of braced steel space frames including soil-structure interaction via teaching-learning-based optimization and harmony search algorithms. Adv. Civ. Eng. 2018, 2018, 3854620. [Google Scholar] [CrossRef] [Green Version]
- de Almeida, F.S. Optimization of laminated composite structures using harmony search algorithm. Compos. Struct. 2019, 221, 110852. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Geem, Z.W. Review of harmony search with respect to algorithm structure. Swarm Evolutionary Comput. 2019, 48, 31–43. [Google Scholar] [CrossRef]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Yang, X.S. Flower pollination algorithm for global optimization. In Proceedings of the Unconventional Computation and Natural Computation 2012, Orléans, France, 3–7 September 2012; pp. 240–249. [Google Scholar]
- Rao, R. Jaya: A simple and new optimization algorithm for solving constrained and unconstrained optimization problems. Int. J. Ind. Eng. Comput. 2016, 7, 19–34. [Google Scholar]
- Rao, R.V.; Savsani, V.J.; Vakharia, D.P. Teaching–learning-based optimization: A novel method for constrained mechanical design optimization problems. Comput.-Aided Des. 2011, 43, 303–315. [Google Scholar] [CrossRef]
- Saka, M.P.; Hasançebi, O.; Geem, Z.W. Metaheuristics in structural optimization and discussions on harmony search algorithm. Swarm Evol. Comput. 2016, 28, 88–97. [Google Scholar] [CrossRef]
- Cook, R.D. Finite Element Modelling for Stress Analysis; John Wiley &Sons, Inc.: Hoboken, NJ, USA, 1995; ISBN 0-471-10774-3. [Google Scholar]
- Gazi, H. Sonlu Elemanlar Yönemi ile Çalışan Bir Bilgisayar Programının Geliştirilmesi ve Düzlem Gerilme —Düzlem Deformasyon Problemlerinin Analizi. MSc Thesis, Istanbul University, Istanbul, Turkey, 2008. [Google Scholar]
- Weawer, W.; Johnston, P.R. Finite Element for Structural Analysis; Prentice—Hall, Inc.: Upper Saddle River, NJ, USA, 1984. [Google Scholar]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TPOMA (FPA) | TPOMA (JA) | TPOMA (HS) | TPOMA (HHS) | TPOMA (TLBO) | FEM | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Node | Δx (mm) | Δy (mm) | Δx (mm) | Δy (mm) | Δx (mm) | Δy (mm) | Δx (mm) | Δy (mm) | Δx (mm) | Δy (mm) | Δx (mm) | Δy (mm) |
| 4 | 0.19369 | 0.25151 | 0.19369 | 0.25151 | 0.20715 | 0.27089 | 0.19259 | 0.24992 | 0.19369 | 0.25151 | 0.1937 | 0.2515 |
| 5 | 0.00059 | 0.24176 | 0.00059 | 0.24176 | −0.00003 | 0.26078 | 0.00059 | 0.24022 | 0.00059 | 0.24176 | 0.0006 | 0.2418 |
| 6 | −0.19912 | 0.25858 | −0.19912 | 0.25858 | −0.21326 | 0.27713 | −0.19799 | 0.25693 | −0.19912 | 0.25858 | −0.1991 | 0.2586 |
| 7 | 0.34701 | 0.84814 | 0.34701 | 0.84814 | 0.36992 | 0.90709 | 0.34517 | 0.84317 | 0.34701 | 0.84814 | 0.347 | 0.8481 |
| 8 | −0.00314 | 0.8425 | −0.00314 | 0.8425 | −0.0046 | 0.90067 | −0.00312 | 0.83754 | −0.00314 | 0.8425 | −0.0031 | 0.8425 |
| 9 | −0.35408 | 0.85627 | −0.35408 | 0.85627 | −0.37917 | 0.91413 | −0.35220 | 0.85123 | −0.35408 | 0.85627 | −0.3541 | 0.8563 |
| 10 | 0.4547 | 1.70967 | 0.4547 | 1.70967 | 0.48581 | 1.83084 | 0.45247 | 1.70025 | 0.4547 | 1.70967 | 0.4547 | 1.7097 |
| 11 | −0.00576 | 1.70704 | −0.00576 | 1.70704 | −0.00686 | 1.82991 | −0.00571 | 1.69762 | −0.00576 | 1.70704 | −0.0058 | 1.707 |
| 12 | −0.46619 | 1.71762 | −0.46619 | 1.71762 | −0.50155 | 1.8422 | −0.46388 | 1.70816 | −0.46619 | 1.71762 | −0.4662 | 1.7176 |
| 13 | 0.51858 | 2.74696 | 0.51858 | 2.74696 | 0.55003 | 2.93925 | 0.51618 | 2.73258 | 0.51858 | 2.74696 | 0.5186 | 2.747 |
| 14 | −0.0084 | 2.74754 | −0.0084 | 2.74754 | −0.01011 | 2.94063 | −0.00834 | 2.73315 | −0.0084 | 2.74754 | −0.0084 | 2.7475 |
| 15 | −0.53422 | 2.75474 | −0.53422 | 2.75473 | −0.57002 | 2.94848 | −0.53172 | 2.74033 | −0.53422 | 2.75473 | −0.5342 | 2.7547 |
| 16 | 0.53861 | 3.87428 | 0.53861 | 3.87428 | 0.57192 | 4.13881 | 0.53619 | 3.85487 | 0.53861 | 3.87428 | 0.5386 | 3.8743 |
| 17 | −0.01054 | 3.87495 | −0.01054 | 3.87495 | −0.01274 | 4.14002 | −0.01048 | 3.85555 | −0.01054 | 3.87495 | −0.0105 | 3.8749 |
| 18 | −0.55939 | 3.88219 | −0.55939 | 3.88219 | −0.59412 | 4.14664 | −0.55686 | 3.86278 | −0.55939 | 3.88219 | −0.5594 | 3.8822 |
| Пp (Nmm) | −38.8 | −38.8 | −38.6 | −38.8 | −38.8 | −38.8 | ||||||
| Analysis number | 999103 | 672375 | 999343 | 531810 | 987341 | − | ||||||
| TPOMA (FPA) | TPOMA (JA) | TPOMA (HS) | TPOMA (HHS) | TPOMA (TLBO) | FEM | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Node | Δx (mm) | Δy (mm) | Δx (mm) | Δy (mm) | Δx (mm) | Δy (mm) | Δx (mm) | Δy (mm) | Δx (mm) | Δy (mm) | Δx (mm) | Δy (mm) |
| 1 | 0.000000 | −0.006729 | 0.000000 | −0.006729 | 0.000000 | −0.006268 | 0.000000 | −0.006729 | 0.000000 | −0.006729 | 0.000000 | −0.006729 |
| 2 | 0.000000 | −0.010509 | 0.000000 | −0.010509 | 0.000000 | −0.010043 | 0.000000 | −0.010509 | 0.000000 | −0.010509 | 0.000000 | −0.010509 |
| 3 | 0.000000 | −0.014899 | 0.000000 | −0.014899 | 0.000000 | −0.014802 | 0.000000 | −0.014899 | 0.000000 | −0.014899 | 0.000000 | −0.014899 |
| 4 | 0.000000 | −0.021782 | 0.000000 | −0.021782 | 0.000000 | −0.021799 | 0.000000 | −0.021782 | 0.000000 | −0.021782 | 0.000000 | −0.021782 |
| 5 | 0.000000 | −0.033078 | 0.000000 | −0.033078 | 0.000000 | −0.032940 | 0.000000 | −0.033078 | 0.000000 | −0.033078 | 0.000000 | −0.033078 |
| 6 | 0.010933 | −0.007655 | 0.010933 | −0.007655 | 0.010747 | −0.007295 | 0.010933 | −0.007655 | 0.010933 | −0.007655 | 0.010933 | −0.007655 |
| 7 | 0.010157 | −0.008901 | 0.010157 | −0.008901 | 0.010037 | −0.008670 | 0.010157 | −0.008901 | 0.010157 | −0.008901 | 0.010157 | −0.008901 |
| 8 | 0.015549 | −0.012842 | 0.015549 | −0.012842 | 0.015359 | −0.012651 | 0.015549 | −0.012842 | 0.015549 | −0.012842 | 0.015549 | −0.012842 |
| 9 | 0.024757 | −0.019430 | 0.024757 | −0.019430 | 0.024694 | −0.019200 | 0.024757 | −0.019430 | 0.024757 | −0.019430 | 0.024757 | −0.019430 |
| 10 | 0.040879 | −0.031224 | 0.040879 | −0.031224 | 0.041076 | −0.031181 | 0.040879 | −0.031224 | 0.040879 | −0.031224 | 0.040879 | −0.031224 |
| 11 | 0.020164 | −0.005416 | 0.020164 | −0.005416 | 0.019642 | −0.005210 | 0.020164 | −0.005416 | 0.020164 | −0.005416 | 0.020164 | −0.005416 |
| 12 | 0.020301 | −0.004872 | 0.020301 | −0.004872 | 0.019816 | −0.004809 | 0.020301 | −0.004872 | 0.020301 | −0.004872 | 0.020301 | −0.004872 |
| 13 | 0.030207 | −0.008308 | 0.030207 | −0.008308 | 0.029842 | −0.008150 | 0.030207 | −0.008308 | 0.030207 | −0.008308 | 0.030207 | −0.008308 |
| 14 | 0.046860 | −0.013632 | 0.046860 | −0.013632 | 0.046616 | −0.013580 | 0.046860 | −0.013632 | 0.046860 | −0.013632 | 0.046860 | −0.013632 |
| 15 | 0.100048 | −0.028230 | 0.100048 | −0.028230 | 0.100091 | −0.028551 | 0.100048 | −0.028230 | 0.100048 | −0.028230 | 0.100048 | −0.028230 |
| 16 | 0.028501 | −0.002651 | 0.028501 | −0.002651 | 0.028253 | −0.002573 | 0.028501 | −0.002651 | 0.028501 | −0.002651 | 0.028501 | −0.002651 |
| 17 | 0.029659 | −0.001586 | 0.029659 | −0.001586 | 0.029287 | −0.001512 | 0.029659 | −0.001586 | 0.029659 | −0.001586 | 0.029659 | −0.001586 |
| 18 | 0.041562 | −0.003615 | 0.041562 | −0.003615 | 0.041091 | −0.003537 | 0.041562 | −0.003615 | 0.041562 | −0.003615 | 0.041562 | −0.003615 |
| 19 | 0.062858 | −0.006678 | 0.062858 | −0.006678 | 0.062583 | −0.006649 | 0.062858 | −0.006678 | 0.062858 | −0.006678 | 0.062858 | −0.006678 |
| 20 | 0.103448 | −0.010629 | 0.103448 | −0.010629 | 0.103312 | −0.010919 | 0.103448 | −0.010629 | 0.103448 | −0.010629 | 0.103448 | −0.010629 |
| 21 | 0.030675 | 0.000000 | 0.030675 | 0.000000 | 0.030360 | 0.000000 | 0.030675 | 0.000000 | 0.030675 | 0.000000 | 0.030675 | 0.000000 |
| 22 | 0.033662 | 0.000000 | 0.033662 | 0.000000 | 0.033220 | 0.000000 | 0.033662 | 0.000000 | 0.033662 | 0.000000 | 0.033662 | 0.000000 |
| 23 | 0.046097 | 0.000000 | 0.046097 | 0.000000 | 0.045517 | 0.000000 | 0.046097 | 0.000000 | 0.046097 | 0.000000 | 0.046097 | 0.000000 |
| 24 | 0.068770 | 0.000000 | 0.068770 | 0.000000 | 0.068295 | 0.000000 | 0.068770 | 0.000000 | 0.068770 | 0.000000 | 0.068770 | 0.000000 |
| 25 | 0.105491 | 0.000000 | 0.105491 | 0.000000 | 0.105030 | 0.000000 | 0.105491 | 0.000000 | 0.105491 | 0.000000 | 0.105491 | 0.000000 |
| Пp (Nmm) | −900.16 | −900.16 | −900.08 | −900.16 | −900.16 | −900.16 | ||||||
| Analysis number | 59025 | 63115 | 59146 | 29997 | 56575 | − | ||||||
| TPOMA (FPA) | TPOMA (JA) | TPOMA (HS) | TPOMA (HHS) | TPOMA (TLBO) | FEM | |
|---|---|---|---|---|---|---|
| Пp (Nmm) | −905.08 | −905.08 | −901.48 | −905.08 | −905.08 | −905.08 |
| Analysis number | 999992 | 972853 | 876457 | 269416 | 947564 | − |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kayabekir, A.E.; Toklu, Y.C.; Bekdaş, G.; Nigdeli, S.M.; Yücel, M.; Geem, Z.W. A Novel Hybrid Harmony Search Approach for the Analysis of Plane Stress Systems via Total Potential Optimization. Appl. Sci. 2020, 10, 2301. https://doi.org/10.3390/app10072301
Kayabekir AE, Toklu YC, Bekdaş G, Nigdeli SM, Yücel M, Geem ZW. A Novel Hybrid Harmony Search Approach for the Analysis of Plane Stress Systems via Total Potential Optimization. Applied Sciences. 2020; 10(7):2301. https://doi.org/10.3390/app10072301
Chicago/Turabian StyleKayabekir, Aylin Ece, Yusuf Cengiz Toklu, Gebrail Bekdaş, Sinan Melih Nigdeli, Melda Yücel, and Zong Woo Geem. 2020. "A Novel Hybrid Harmony Search Approach for the Analysis of Plane Stress Systems via Total Potential Optimization" Applied Sciences 10, no. 7: 2301. https://doi.org/10.3390/app10072301
APA StyleKayabekir, A. E., Toklu, Y. C., Bekdaş, G., Nigdeli, S. M., Yücel, M., & Geem, Z. W. (2020). A Novel Hybrid Harmony Search Approach for the Analysis of Plane Stress Systems via Total Potential Optimization. Applied Sciences, 10(7), 2301. https://doi.org/10.3390/app10072301